
From Xception to NEXcepTion: New Design Decisions and Neural
Architecture Search
Hadar Shavit
a
, Filip Jatelnicki
b
, Pol Mor-Puigventós
c
and Wojtek Kowalczyk
d
Leiden Institute of Advanced Computer Science (LIACS), Leiden University, Niels Bohrweg 1, 2333CA, The Netherlands
Keywords:
Deep Learning, ConvNeXt, Xception, Image Classification, ImageNet, Computer Vision.
Abstract:
In this paper, we present a modified Xception architecture, the NEXcepTion network. Our network has sig-
nificantly better performance than the original Xception, achieving top-1 accuracy of 81.5% on the ImageNet
validation dataset (an improvement of 2.5%) as well as a 28% higher throughput. Another variant of our
model, NEXcepTion-TP, reaches 81.8% top-1 accuracy, similar to ConvNeXt (82.1%), while having a 27%
higher throughput. Our model is the result of applying improved training procedures and new design decisions
combined with an application of Neural Architecture Search (NAS) on a smaller dataset. These findings call
for revisiting older architectures and reassessing their potential when combined with the latest enhancements.
Our code is available at https://github.com/hadarshavit/NEXcepTion.
1 INTRODUCTION
There are multiple deep-learning-based approaches to
tackle the image classification problem. In the last
decade, the main attention was put into Transform-
ers and convolutional-based architectures. Most of
the recent findings in the convolutional neural net-
works field focused on improving the performance
of the ResNet architecture (Liu et al., 2022; Wight-
man et al., 2021). In this paper we investigate how
similar modifications can affect other convolutional
architectures, specifically, the Xception model. In
the following sections, we present NEXcepTion, sev-
eral Xception-based models that reach state-of-the-art
level accuracies. Our models are the result of run-
ning Neural Architecture Search (NAS) experiments
on the CIFAR-100 dataset (Krizhevsky et al., 2009)
and an improved training procedure based, among
other techniques, on new optimization methods and
data augmentation. Our search space for experiments
consists of variants of network architectures with dif-
ferent sizes of convolutional layers, activation func-
tions, modern normalization and pooling methods, to-
gether with other recently introduced designs. As a fi-
nal result of our experiments, we create three variants
of the NEXcepTion network. All of them outperform
a
https://orcid.org/0000-0001-6709-9955
b
https://orcid.org/0000-0002-1717-167X
c
https://orcid.org/0000-0002-4843-3732
d
https://orcid.org/0000-0002-6973-1341
the Xception model in the image classification task in
terms of accuracy and inference throughput. Compar-
ing our NEXcepTion-TP model to the recently pub-
lished ConvNeXt-T (Liu et al., 2022), our network
reaches higher throughput (1428±9 vs. 1125±5 im-
ages/second) while having a similar accuracy.
2 RELATED WORK
2.1 Recent Research
During the last decade, numerous architectures have
been proposed for computer vision with convolu-
tional neural networks as their central building block.
AlexNet (Krizhevsky et al., 2017) trained on Ima-
geNet with striking results, compared to the then
state-of-the-art models, achieving top-1 and top-5 test
set error rates of 37.5% and 17.0% respectively. This
was the moment when state-of-the-art solutions pro-
gressed from pattern recognition to deep learning.
Thereafter, remarkable progress has been made al-
most yearly, starting with GoogLeNet (Szegedy et al.,
2014) with a more efficient (due to the Inception mod-
ule) and deeper architecture. Later on, ResNet (He
et al., 2015) was introduced, with residual (skip) con-
nections that allowed for even deeper networks. In
2016, both of those last contributions were merged
generating Extreme Inception, shown in Xception
(Chollet, 2017). This time, the Inception module
Shavit, H., Jatelnicki, F., Mor-Puigventós, P. and Kowalczyk, W.
From Xception to NEXcepTion: New Design Decisions and Neural Architecture Search.
DOI: 10.5220/0011623100003411
In Proceedings of the 12th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2023), pages 229-236
ISBN: 978-989-758-626-2; ISSN: 2184-4313
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
229

was replaced by the Xception module which used
a depthwise separable convolution layer as its basic
building block. In the following year, SENet (Hu
et al., 2018) boosted previous networks, proposing
SE-Inception and SE-ResNet. SENet proposed the
“Squeeze-and-Excitation” (SE) block focusing on the
depth dimension, recalibrating channel-wise feature
responses. EfficientNet (Tan and Le, 2019) and Ef-
ficientNetV2 (Tan and Le, 2021) suggested a proper
scaling of existing architectures achieving superior
performances.
In recent years, the machine vision community
adopted the Transformers architecture, originally de-
veloped for Natural Language Processing (NLP) (De-
vlin et al., 2019) by introducing the Vision Trans-
former (ViT) (Dosovitskiy et al., 2021). Since this
installation of ViT, various improvements have been
introduced including the Data-efficient image Trans-
formers (DeiT) (Touvron et al., 2021), Swin Trans-
former (Liu et al., 2021b) and the recent Neighbour-
hood Attention Transformer (Hassani et al., 2022).
In addition to the improvements in the macro-level
architectures, other micro-level improvements were
introduced. While ReLU was widely employed a few
years ago, newer activation functions were published,
for instance, the Gaussian Error Linear Unit (GELU)
(Hendrycks and Gimpel, 2016).
Moreover, new training procedures were ex-
ploited. While in the past basic Stochastic Gradient
Descent (SGD) was used to train state-of-the-art mod-
els, today there are new variants of gradient-based
optimizers such as RAdam (Liu et al., 2020) AdamP
(Heo et al., 2021) and LAMB (You et al., 2020) with
sophisticated learning rate schedules such as cosine
decay (Loshchilov and Hutter, 2017). Furthermore,
data augmentation techniques such as RandAugment
(Cubuk et al., 2020), RandErase (Zhong et al., 2020),
Mixup (Zhang et al., 2018) and CutMix (Yun et al.,
2019) greatly improved the accuracy of neural net-
works.
2.2 Xception
The Xception neural network was introduced by
Chollet (2017). This architecture implements the
depthwise separable convolution operation. These
convolutions consist of two parts: a depthwise convo-
lution followed by a pointwise convolution. We refer
to them as separable convolutional layers. The three
parts of the Xception architecture are:
Entry Flow. First, a stem of two convolutional layers
of increasing sizes, followed by the first layers of the
model, and then, three downsampling blocks. Each of
these blocks has two separable convolutional layers
with a kernel size of 3 combined with a Max Pooling
layer. Each block has a skip connection with a 1 × 1
convolution with stride 2.
Middle Flow. The central unit contains 8 Xcep-
tion blocks. Each block has three separable convo-
lutional layers with a kernel size of 3 and stride 1.
The method applied does not reshape the input size.
For this reason, the size of the features map remains
19 × 19× 728 through this part of the network. In ad-
dition, there is a residual identity connection around
every block.
Exit Flow. The closure section starts with one down-
sampling block, like the ones in the entry flow, fol-
lowed by two separable convolutions. Lastly, there
is a classification head with a global average pooling
and fully connected layer(s).
2.3 Neural Architecture Search
Neural Architecture Search (NAS) is a collection of
methods for automating the design of neural network
architectures (Elsken et al., 2019). This can be done
using automated search in a pre-defined configura-
tion space using automated algorithm configuration
methods such as Bayesian Optimization (Hutter et al.,
2011; van Stein et al., 2019; Jin et al., 2019) or Evo-
lutionary Algorithms (Liu et al., 2021a). The usage
of NAS methods has grown significantly, which can
be observed in recent works like EfficientNetV2 (Tan
and Le, 2021), which used NAS to improve Efficient-
Net.
3 NEXcepTion
In this section, we present and explain our reasoning
behind the chosen techniques for our search space,
inspired by many recent design decisions, including
ConvNeXt by Liu et al. (2022) and the re-study of
ResNet by Wightman et al. (2021), and extending
those ideas with other innovations.
The search space is built with the PyTorch library
(Paszke et al., 2019) and timm (Wightman, 2019). We
apply SMAC (Lindauer et al., 2022) automated algo-
rithm configurator to find a good configuration of im-
provements. Due to the considerable training time of
a full network on ImageNet, we test the configura-
tions with a reduced network, with four blocks in its
main part instead of eight, and on a smaller dataset
(CIFAR-100 (Krizhevsky et al., 2009))
1
, with only
one downsampling block in the entry flow. This al-
lows the trials of as many configurations as possible
1
https://www.cs.toronto.edu/~kriz/cifar.html
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
230
within 3 days on a single RTX 3090 Ti. The search
space containing the multiple combinations of param-
eters has more than fifty thousand different possible
configurations. We optimize the architecture to maxi-
mize accuracy.
Our search space consists of various kernel sizes
(3, 5, 7, 9), stem types (convolutional stem or patchify
stem), different pooling types (max pooling, convo-
lutional downsampling layer or blur pool), whether
to implement bottleneck in the middle flow, or to
add Squeeze-and-Excitation at the end of each block.
Moreover, we experiment with various positions and
types of activation functions (ReLU, GELU, ELU or
CELU) and with different positions and types of nor-
malization methods (batch normalization or layer nor-
malization).
We performed several preliminary experiments to
find the optimal training procedure. However, we find
that existing ones perform better on the final models.
Therefore, we use similar training procedures to the
ones created by the authors of Wightman et al. (2021)
for the ResNet network. For more details about train-
ing procedure parameters, see Table 2 and the com-
parison between Xception and NEXcepTion architec-
tures in Tables 5 and 6, all in the Appendix section.
3.1 Training Procedures
Stochastic Depth. The original Xception network
performs regularization by adding a Dropout layer be-
fore the classification layer. Stochastic depth (Huang
et al., 2016) changes the network depth during train-
ing by randomly bypassing groups of blocks and us-
ing the entire network for inference. Consequently,
training time is reduced substantially and accuracy is
improved introducing regularization into the network.
Optimizer. In our paper, we choose Layer-wise
Adaptive Moments optimizer for Batch training
(LAMB) optimizer inspired by You et al. (2020). As
stated by Wightman et al. (2021), LAMB optimizer
increases the efficiency and performance of the net-
work, in comparison to other common optimizers,
like AdamW in Liu et al. (2022), LAMB performs
more accurate updates of the learning rate.
Data Augmentation. While the original Xception
model was trained without any data augmentation
methods, newer training procedures utilize multi-
ple techniques, which improve generalization. In
our NEXcepTion model, we apply Rand Augment
(Cubuk et al., 2020) that performs a few random trans-
formations, Mixup (Zhang et al., 2018) and CutMix
(Yun et al., 2019), which merge images, see Table 2
for specific values.
Learning Rate Decay. Similarly to recent models
such as DeiT (Touvron et al., 2021), we adopt co-
sine annealing (Loshchilov and Hutter, 2017) with
warmup epochs. This method initially sets a low
learning rate value, which gradually increases during
the warmup epochs. Then, the learning rate is gradu-
ally reduced using the cosine function to achieve rapid
learning.
3.2 Structural Changes
“Soft” Patchify Stem. Patchify layers are character-
ized by large kernel sizes and non-overlapping convo-
lutions (by setting the stride and the kernel size to the
same value). Inspired by this design, we add a 2 × 2
patchify layer to the search space, which we consider
a “soft” patch, different from the aggressive 16 × 16
solution proposed by Dosovitskiy et al. (2021) in the
Transformer schema and the 4 × 4 from ConvNeXt
(Liu et al., 2022). We use the initial block with kernel
2 × 2 and stride 2 to match the original Xception net-
work and to fit the output size. This stem is adapted to
the reduced resolution of the input images, similarly
to the efficient configuration introduced by Cordon-
nier et al. (2020).
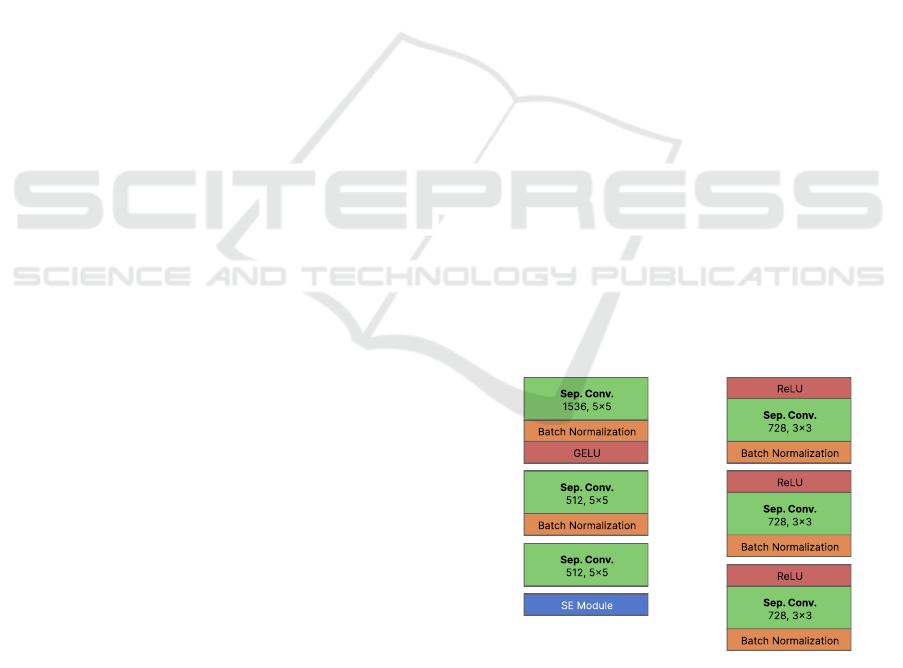
Bottleneck. The idea of inverted bottleneck was in-
troduced by Sandler et al. (2018) and has been preva-
lent in modern attention-based architectures, signifi-
cantly improving performance. The Xception archi-
tecture does not feature a bottleneck and has a con-
stant number of channels through the middle flow of
the network. In the NEXcepTion architecture, we in-
troduce a bottleneck in the middle flow blocks, as pro-
posed by Liu et al. (2022), see Figure 1.
Figure 1: NEXcepTion block (left) and Xception block
(right).
Larger Kernels. Inspired by Liu et al. (2022), among
others, we pick larger kernels for our experiments,
and we achieve the best accuracy with their size set to
5. Combining this idea with bottleneck blocks and the
reduced resolution allows using bigger kernels with-
From Xception to NEXcepTion: New Design Decisions and Neural Architecture Search
231

out excessive increase in the computational demand.
Squeeze-and-Excitation Block. Squeeze-and-
Excitation block (SE block) from Hu et al. (2018)
improves channel interdependencies with an insignif-
icant decrease in efficiency by recalibrating the fea-
ture responses channel-wise, creating superior feature
maps. SE blocks provide significant performance im-
provement and are easy to include in existing net-
works as specified by Hu et al. (2018).
Fewer Activations and Normalizations. Similarly
to Liu et al. (2022), we employ less activation layers
than in the original Xception network. Fewer activa-
tion layers is a distinctive property of the state-of-the-
art Transformer blocks and, by replicating this con-
cept, we can achieve higher accuracy.
Moreover, what is also inherent to Transformers
architectures, is fewer normalization layers than in
typical convolution-based solutions. It is important
to mention that in the original Xception architecture,
all convolutional layers are followed by batch normal-
ization.
Activation Function. Concerning neuron activa-
tions, GELU (Hendrycks and Gimpel, 2016) is used
in modern Transformer architectures like BERT (De-
vlin et al., 2019) and recent convolutional-based ar-
chitectures like ConvNeXt (Liu et al., 2022). Despite
ReLU’s simplicity and efficiency, we decide to exper-
iment with different activation functions, inspired by
the survey performed by Dubey et al. (2021). Based
on our search, we achieve the best results with the
GELU activation function.
Standardizing the Input. The original Xception
model uses an input size of 299 × 299. We found that
standardizing the input size to 224 × 224, as in He
et al. (2015), makes the training faster on Nvidia Ten-
sor Cores. To compensate for the lower resolution, we
make the network wider by adding more channels.
Blur Pooling. Inspired by the solution from Zhang
(2019), we integrate a blurring procedure before
subsampling the signal. By introducing this anti-
aliasing technique, our network generalizes better and
achieves higher accuracy.
4 NEXcepTion VARIANTS
As a result of our experiments, we produce a configu-
ration of a downsized network.
We prepare two different NEXcepTion variants,
adapted to the complexities of the main “Tiny” and
“Small” recent state-of-the-art models. This allows
us to compare them to recent models with similar
features. Additionally, we construct NEXcepTion-TP
with pyramid-like architecture. All the variants use
the methods described in the previous section and the
NEXcepTion block presented on Figure 1.
NEXcepTion-T. This model exploits all the methods
described in the previous section, see Table 5 in the
Appendix. It has 24.5M parameters and 4.7 GFLOPs.
The motivation for it is to have similar FLOPs and
a number of parameters to the recent state-of-the-art
models such as ConvNeXt (Liu et al., 2022) and Swin
Transformers’ (Liu et al., 2021b) tiny models, for in-
stance in ConvNeXt-T and Swin-T.
NEXcepTion-S. This architecture is a wider variant
with 8.5 GFLOPs and 43.4M parameters. The moti-
vation for it is to have a model with similar FLOPs to
the original Xception network (Chollet, 2017).
NEXcepTion-TP. While the Xception architecture
and the two other variants have an isotropic archi-
tecture with a constant resolution through the mid-
dle flow, other architectures such as ResNet and Con-
vNeXt have a pyramid-like architecture. Such ar-
chitecture incorporates a few stages in its middle
flow and the resolution decreases from stage to stage,
hence, the name “Pyramid”. We use the ConvNeXt
architecture and replace the ConvNeXt blocks with
NEXcepTion blocks, as well as substituting Layer
Normalization with Batch Normalization and adding
one more block in the second phase to have a compa-
rable number of FLOPs. This Pyramid NEXcepTion
model is trained with the same training procedure
as NEXcepTion. Our motivation is to check how
the NEXcepTion blocks’ performance changes with
the pyramid architecture, as the pyramid ConvNeXt
has significantly higher accuracy than the isotropic
ConvNeXt (82.1% vs. 79.7%). This variant has
4.5GFLOPs and 26.6M parameters.
5 RESULTS
5.1 DeepCAVE Analysis
We first present a hyperparameter importance analy-
sis of our NAS process, which can be seen in Figure 4.
We also measured the importance of the stem shape,
the pooling procedure and the SE module, obtaining
an importance of less than 0.1 for those features. We
calculate the Local Hyperparameter Importance (LPI)
using DeepCave (Sass et al., 2022). We can see that
the most important hyperparameter is the block type,
for instance, most of the improvement comes from
shifting to a bottleneck block. Changing the positions
of the normalizations and the kernel sizes of the con-
volutions also has an impact on the performance. We
can see that the activation function type has a rela-
tively small impact on the accuracy of the model.
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
232
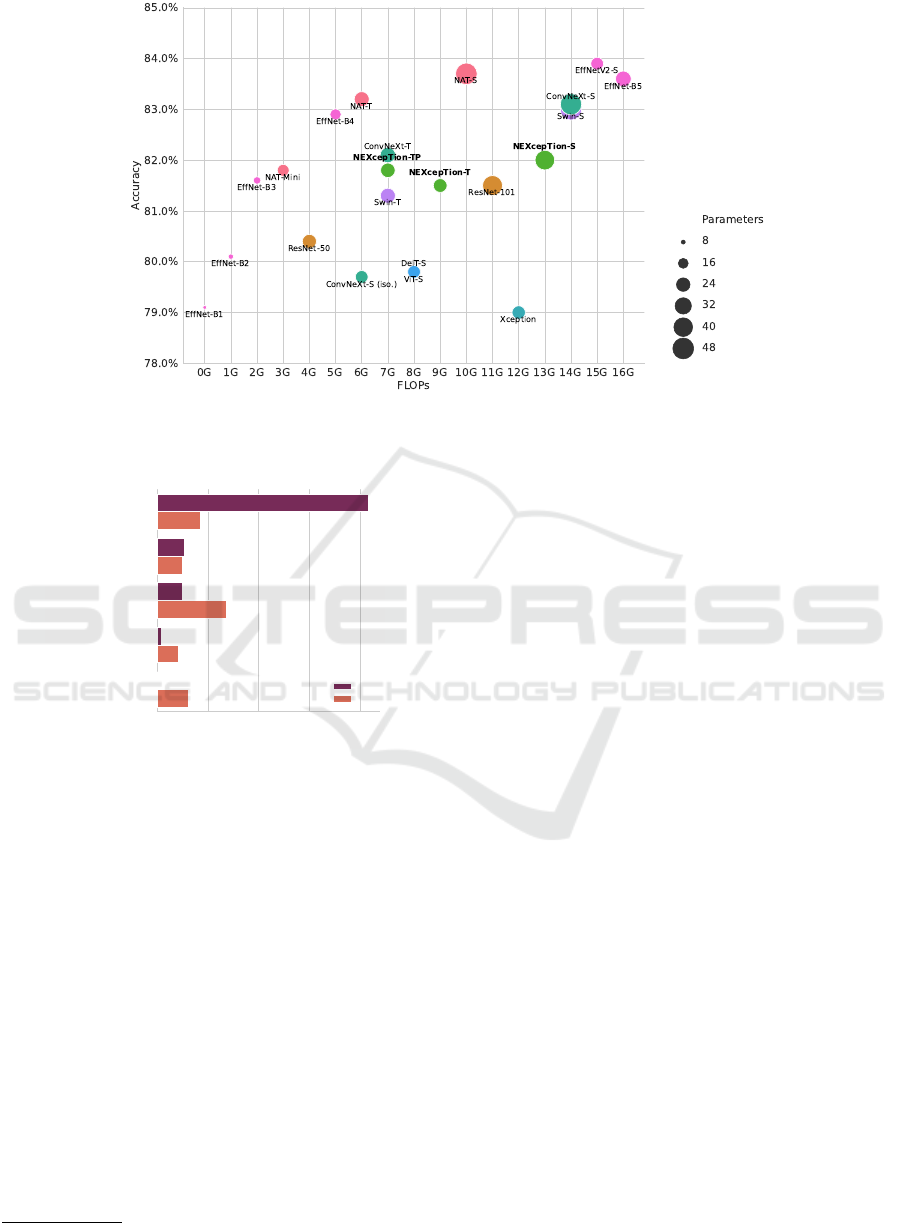
Figure 2: FLOPs and Accuracy comparison of the NEXcepTion variants (in bold), with other contemporary convolutional or
Transformer networks with similar features. The size of the bubbles corresponds to the number of parameters. More details
can be found in Table 1, in the Appendix.
0 1 2 3 4
Importance (LPI)
Block Type
Normalization Position
Kernel Size
Activation Function
Activation Position
Hyperparameter
Epochs
300
100
Figure 4: Local Hyperparameter Importance (LPI). De-
pending on the number of epochs, the influence of the se-
lected methods differs for the final result.
5.2 Image Classification
We train our networks on the widely used ImageNet-
1K image classification benchmark
2
(Russakovsky
et al., 2015). We run our experiments on a single
node of a local cluster. A node has 4 Nvidia RTX
2080 Ti GPUs and 2 Intel Xeon Gold 6126 2.6GHz
with 12 cores CPUs. We run 3 repetitions for each
of the NEXcepTion variants. Each training of the
NEXcepTion-T variant takes 100 hours on average
and for the NEXcepTion-TP 89 hours on average. Fi-
nally, the biggest model we test, the NEXcepTion-
S, takes 150 hours on average. The top-1 accu-
racy of the NEXcepTion-T model is 81.6 ± 0.08, for
NEXcepTion-TP is 81.7± 0.07, for NEXcepTion-S is
82.0 ± 0.07.
2
https://image-net.org/
We compare our three variants with the original
Xception network (Chollet, 2017), with the convolu-
tional neural networks ConvNeXt (Liu et al., 2022),
EfficientNetV1 (Tan and Le, 2019) and Efficient-
NetV2 (Tan and Le, 2021). We also compare our
networks with the Transformer-based models Vision
Transformer (ViT) (Dosovitskiy et al., 2021), Data
Efficient Transformer (DeiT) (Touvron et al., 2021)
and Swin Transformer (Liu et al., 2021b). The re-
ported accuracies of these models belong to the pa-
pers cited next to their names. We calculate the
throughputs using the timm library (Wightman, 2019),
on a single RTX 2080 Ti with a batch size of 256,
mixed precision and channels last, on the ImageNet
validation dataset during 30 repetitions. For the
EffNet-B4 and EffNet-B5 the calculations are made
using a batch size of 128, due to GPU memory issues.
We evaluate the models using timm. For the
NEXcepTion set models, we use our own trained
weights. For isotropic ConvNeXt the trained weights
are from Liu et al. (2022). For Neighbourhood Atten-
tion Transformer (NAT), the trained weights are from
Hassani et al. (2022). The results are presented in Fig-
ures 2 and 3. Additionally, in the Appendix, we offer
the results values in Table 1 and we evaluate the ro-
bustness of the NEXcepTion architectures in Table 3.
All variants of NEXcepTion have higher accu-
racy than Xception, as well as higher throughput.
The NEXcepTion-TP model has significantly higher
throughput than the other compared models with sim-
ilar accuracy.
From Xception to NEXcepTion: New Design Decisions and Neural Architecture Search
233

Figure 3: Throughput and Accuracy comparison of the NEXcepTion variants (in bold) with other contemporary convolutional
or Transformer networks with similar features. The size of the bubbles corresponds to the number of parameters exploited.
More details can be found in Table 1, in the Appendix.
6 CONCLUSIONS
In this work, we implement the backbone of the ex-
isting Xception architecture, with some modifications
and improved training. We show that on the ImageNet
classification task it is possible to achieve signifi-
cantly higher accuracy than with the original archi-
tecture. Our findings strengthen the work published
recently by Liu et al. (2022), in which ConvNeXt was
presented. While ConvNeXt only showed results on
modernizing ResNet, we generalize their findings to
another convolutional architecture.
We also present a NAS method that combines both
the usage of applying modern design decisions to ex-
isting architectures and automated algorithm configu-
ration for neural architecture search. This method can
be used to apply those modifications to other architec-
tures. Nevertheless, it could be useful to generalize
the usage of NAS to enhance existing architectures
with other existing networks to confirm this idea.
When it comes to the obtained results, we provide
three variants of the NEXcepTion network, and all
reach higher accuracy and throughput than Xception.
Our NEXcepTion-T outperforms the original Xcep-
tion, using half of the FLOPs and a similar number of
parameters.
In comparison to ConvNeXt, NEXcepTion-TP
reaches similar accuracy with higher throughput, as
reported in Section 5. We note that ConvNeXt’s pyra-
mid compute ratio gives better results both in terms
of accuracy and inference throughput, as using the
NEXcepTion block with this compute ratio performs
better than using Xception’s compute ratio. In ad-
dition, we can see that the NEXcepTion block has
less impact from the compute ratio than the Con-
vNeXt block as the difference between the isotropic
NEXcepTion-T and the pyramid NEXcepTion-TP is
only 0.2 while the difference between ConvNeXt-T
and isotropic ConvNeXt-S is 2.4 (Liu et al., 2022).
Finally, we also check the generalization of
our models testing their performance on robustness
datasets and comparing them to other state-of-the-art
models. For all datasets, the NEXcepTion set obtains
better results than Xception and is frequently above
the rest of the architectures, see Table 3 in the Ap-
pendix section.
Overall, this work can inspire future research to
use algorithm configuration libraries like SMAC (Lin-
dauer et al., 2022), RayTune (Liaw et al., 2018) or
KerasTuner (O’Malley et al., 2019) as they require
only the definition of a base model and a configura-
tion space.
Another future research direction can be to per-
form an in-depth importance analysis of architectural
designs such as the ones we use, similarly to check-
ing the hyperparameter’s importance as in van Rijn
and Hutter (2018) for traditional machine learning
models.
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
234

ACKNOWLEDGEMENTS
This work was performed using the compute re-
sources from the Academic Leiden Interdisciplinary
Cluster Environment (ALICE) provided by Lei-
den University. We thank Andrius Bernatavicius,
Shima Javanmardi and the participants of the Ad-
vances in Deep Learning 2022 class in LIACS for the
valuable discussions and feedback.
REFERENCES
Chollet, F. (2017). Xception: Deep learning with depthwise
separable convolutions. In CVPR, pages 1251–1258.
Cordonnier, J., Loukas, A., and Jaggi, M. (2020). On the
relationship between self-attention and convolutional
layers. In 8th International Conference on Learning
Representations, ICLR 2020, Addis Ababa, Ethiopia,
April 26-30, 2020. OpenReview.net.
Cubuk, E. D., Zoph, B., Shlens, J., and Le, Q. (2020).
Randaugment: Practical automated data augmentation
with a reduced search space. In Larochelle, H., Ran-
zato, M., Hadsell, R., Balcan, M., and Lin, H., editors,
Advances in Neural Information Processing Systems,
volume 33, pages 18613–18624. Curran Associates,
Inc.
Devlin, J., Chang, M., Lee, K., and Toutanova, K. (2019).
BERT: pre-training of deep bidirectional transformers
for language understanding. In Burstein, J., Doran,
C., and Solorio, T., editors, NAACL-HLT, pages 4171–
4186. Association for Computational Linguistics.
Dosovitskiy, A., Beyer, L., Kolesnikov, A., Weissenborn,
D., Zhai, X., Unterthiner, T., Dehghani, M., Minderer,
M., Heigold, G., Gelly, S., Uszkoreit, J., and Houlsby,
N. (2021). An image is worth 16x16 words: Trans-
formers for image recognition at scale. In 9th Interna-
tional Conference on Learning Representations, ICLR
2021, Virtual Event, Austria, May 3-7, 2021. OpenRe-
view.net.
Dubey, S. R., Singh, S. K., and Chaudhuri, B. B. (2021).
A comprehensive survey and performance analysis of
activation functions in deep learning. arXiv preprint
arXiv:2109.14545.
Elsken, T., Metzen, J. H., and Hutter, F. (2019). Neural
Architecture Search, pages 63–77. Springer Interna-
tional Publishing, Cham.
Hassani, A., Walton, S., Li, J., Li, S., and Shi, H. (2022).
Neighborhood attention transformer. arXiv preprint
arXiv:2204.07143.
He, K., Zhang, X., Ren, S., and Sun, J. (2015). Deep resid-
ual learning for image recognition. CVPR, pages 770–
778.
Hendrycks, D., Basart, S., Mu, N., Kadavath, S., Wang, F.,
Dorundo, E., Desai, R., Zhu, T., Parajuli, S., Guo, M.,
et al. (2021a). The many faces of robustness: A crit-
ical analysis of out-of-distribution generalization. In
ICCV, pages 8340–8349.
Hendrycks, D. and Gimpel, K. (2016). Gaussian error linear
units (gelus). arXiv preprint arXiv:1606.08415.
Hendrycks, D., Zhao, K., Basart, S., Steinhardt, J., and
Song, D. (2021b). Natural adversarial examples. In
CVPR, pages 15262–15271.
Heo, B., Chun, S., Oh, S. J., Han, D., Yun, S., Kim, G.,
Uh, Y., and Ha, J. (2021). Adamp: Slowing down
the slowdown for momentum optimizers on scale-
invariant weights. In 9th International Conference on
Learning Representations, ICLR 2021, Virtual Event,
Austria, May 3-7, 2021. OpenReview.net.
Hu, J., Shen, L., and Sun, G. (2018). Squeeze-and-
excitation networks. In CVPR, pages 7132–7141.
Huang, G., Sun, Y., Liu, Z., Sedra, D., and Weinberger,
K. Q. (2016). Deep networks with stochastic depth. In
European conference on computer vision, pages 646–
661. Springer.
Hutter, F., Hoos, H. H., and Leyton-Brown, K. (2011).
Sequential model-based optimization for general al-
gorithm configuration. In Proc. of LION-5, page
507–523.
Jin, H., Song, Q., and Hu, X. (2019). Auto-keras: An ef-
ficient neural architecture search system. In Proceed-
ings of the 25th ACM SIGKDD International Confer-
ence on Knowledge Discovery & Data Mining, pages
1946–1956. ACM.
Krizhevsky, A., Hinton, G., et al. (2009). Learning multiple
layers of features from tiny images. Technical report,
University of Toronto.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2017). Im-
agenet classification with deep convolutional neural
networks. Communications of the ACM, 60(6):84–90.
Liaw, R., Liang, E., Nishihara, R., Moritz, P., Gonzalez,
J. E., and Stoica, I. (2018). Tune: A research platform
for distributed model selection and training. arXiv
preprint arXiv:1807.05118.
Lindauer, M., Eggensperger, K., Feurer, M., Biedenkapp,
A., Deng, D., Benjamins, C., Ruhkopf, T., Sass, R.,
and Hutter, F. (2022). Smac3: A versatile bayesian op-
timization package for hyperparameter optimization.
Journal of Machine Learning Research, 23(54):1–9.
Liu, L., Jiang, H., He, P., Chen, W., Liu, X., Gao, J., and
Han, J. (2020). On the variance of the adaptive learn-
ing rate and beyond. In 8th International Confer-
ence on Learning Representations, ICLR 2020, Addis
Ababa, Ethiopia, April 26-30, 2020. OpenReview.net.
Liu, Y., Sun, Y., Xue, B., Zhang, M., Yen, G. G., and Tan,
K. C. (2021a). A survey on evolutionary neural archi-
tecture search. IEEE transactions on neural networks
and learning systems.
Liu, Z., Lin, Y., Cao, Y., Hu, H., Wei, Y., Zhang, Z., Lin, S.,
and Guo, B. (2021b). Swin transformer: Hierarchi-
cal vision transformer using shifted windows. ICCV,
pages 9992–10002.
Liu, Z., Mao, H., Wu, C., Feichtenhofer, C., Darrell, T., and
Xie, S. (2022). A convnet for the 2020s. CVPR, pages
11966–11976.
Loshchilov, I. and Hutter, F. (2017). SGDR: stochastic gra-
dient descent with warm restarts. In 5th International
Conference on Learning Representations, ICLR 2017,
From Xception to NEXcepTion: New Design Decisions and Neural Architecture Search
235

Toulon, France, April 24-26, 2017, Conference Track
Proceedings. OpenReview.net.
O’Malley, T., Bursztein, E., Long, J., Chollet, F., Jin, H.,
Invernizzi, L., et al. (2019). Kerastuner. https://github.
com/keras-team/keras-tuner.
Paszke, A., Gross, S., Massa, F., Lerer, A., Bradbury, J.,
Chanan, G., Killeen, T., Lin, Z., Gimelshein, N.,
Antiga, L., et al. (2019). Pytorch: An imperative style,
high-performance deep learning library. Advances in
neural information processing systems, 32.
Russakovsky, O., Deng, J., Su, H., Krause, J., Satheesh,
S., Ma, S., Huang, Z., Karpathy, A., Khosla, A.,
Bernstein, M., Berg, A. C., and Fei-Fei, L. (2015).
ImageNet Large Scale Visual Recognition Challenge.
International Journal of Computer Vision (IJCV),
115(3):211–252.
Sandler, M., Howard, A., Zhu, M., Zhmoginov, A., and
Chen, L.-C. (2018). Mobilenetv2: Inverted residuals
and linear bottlenecks. In CVPR, pages 4510–4520.
Sass, R., Bergman, E., Biedenkapp, A., Hutter, F., and Lin-
dauer, M. (2022). Deepcave: An interactive analysis
tool for automated machine learning. arXiv preprint
arXiv:2206.03493.
Szegedy, C., Liu, W., Jia, Y., Sermanet, P., Reed, S.,
Anguelov, D., Erhan, D., Vanhoucke, V., and Rabi-
novich, A. (2014). Going deeper with convolutions.
Tan, M. and Le, Q. (2021). Efficientnetv2: Smaller models
and faster training. In International Conference on
Machine Learning, pages 10096–10106. PMLR.
Tan, M. and Le, Q. V. (2019). Mixconv: Mixed depthwise
convolutional kernels. In 30th British Machine Vision
Conference 2019, BMVC 2019, Cardiff, UK, Septem-
ber 9-12, 2019, page 74. BMVA Press.
Touvron, H., Cord, M., Douze, M., Massa, F., Sablayrolles,
A., and Jégou, H. (2021). Training data-efficient
image transformers & distillation through attention.
In International Conference on Machine Learning,
pages 10347–10357. PMLR.
van Rijn, J. N. and Hutter, F. (2018). Hyperparame-
ter importance across datasets. In Proceedings of
the 24th ACM SIGKDD International Conference on
Knowledge Discovery; Data Mining, KDD ’18, page
2367–2376, New York, NY, USA. Association for
Computing Machinery.
van Stein, B., Wang, H., and Bäck, T. (2019). Automatic
configuration of deep neural networks with parallel
efficient global optimization. In 2019 International
Joint Conference on Neural Networks (IJCNN), pages
1–7.
Wang, H., Ge, S., Lipton, Z., and Xing, E. P. (2019). Learn-
ing robust global representations by penalizing local
predictive power. Advances in Neural Information
Processing Systems, 32.
Wightman, R. (2019). Pytorch image models. https:
//github.com/rwightman/pytorch-image-models.
Wightman, R., Touvron, H., and Jegou, H. (2021). Resnet
strikes back: An improved training procedure in
timm. In NeurIPS 2021 Workshop on ImageNet: Past,
Present, and Future.
You, Y., Li, J., Reddi, S. J., Hseu, J., Kumar, S., Bho-
janapalli, S., Song, X., Demmel, J., Keutzer, K.,
and Hsieh, C. (2020). Large batch optimization for
deep learning: Training BERT in 76 minutes. In
8th International Conference on Learning Represen-
tations, ICLR 2020, Addis Ababa, Ethiopia, April 26-
30, 2020. OpenReview.net.
Yun, S., Han, D., Oh, S. J., Chun, S., Choe, J., and Yoo,
Y. (2019). Cutmix: Regularization strategy to train
strong classifiers with localizable features. In ICCV,
pages 6023–6032.
Zhang, H., Cissé, M., Dauphin, Y. N., and Lopez-Paz, D.
(2018). mixup: Beyond empirical risk minimization.
In 6th International Conference on Learning Repre-
sentations, ICLR 2018, Vancouver, BC, Canada, April
30 - May 3, 2018, Conference Track Proceedings.
OpenReview.net.
Zhang, R. (2019). Making convolutional networks shift-
invariant again. In International conference on ma-
chine learning, pages 7324–7334. PMLR.
Zhong, Z., Zheng, L., Kang, G., Li, S., and Yang, Y. (2020).
Random erasing data augmentation. In Proceedings
of the AAAI conference on artificial intelligence, vol-
ume 34, pages 13001–13008.
APPENDIX
The Appendix of the paper, including a detailed ar-
chitectures description, detailed results, and a ro-
bustness analysis, is available at https://github.com/
hadarshavit/NEXcepTion/blob/main/appendix.pdf.
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
236
