
Semantic Segmentation on Neuromorphic Vision Sensor Event-Streams
Using PointNet++ and UNet Based Processing Approaches
Tobias Bolten
1 a
, Regina Pohle-Fr
¨
ohlich
1
and Klaus D. T
¨
onnies
2
1
Institute for Pattern Recognition, Hochschule Niederrhein, Krefeld, Germany
2
Department of Simulation and Graphics, University of Magdeburg, Germany
Keywords:
Dynamic Vision Sensor, Semantic Segmentation, PointNet++, UNet.
Abstract:
Neuromorphic Vision Sensors, which are also called Dynamic Vision Sensors, are bio-inspired optical sensors
which have a completely different output paradigm compared to classic frame-based sensors. Each pixel of
these sensors operates independently and asynchronously, detecting only local changes in brightness. The out-
put of such a sensor is a spatially sparse stream of events, which has a high temporal resolution. However, the
novel output paradigm raises challenges for processing in computer vision applications, as standard methods
are not directly applicable on the sensor output without conversion.
Therefore, we consider different event representations by converting the sensor output into classical 2D frames,
highly multichannel frames, 3D voxel grids as well as a native 3D space-time event cloud representation. Us-
ing PointNet++ and UNet, these representations and processing approaches are systematically evaluated to
generate a semantic segmentation of the sensor output stream. This involves experiments on two different
publicly available datasets within different application contexts (urban monitoring and autonomous driving).
In summary, PointNet++ based processing has been found advantageous over a UNet approach on lower reso-
lution recordings with a comparatively lower event count. On the other hand, for recordings with ego-motion
of the sensor and a resulting higher event count, UNet-based processing is advantageous.
1 INTRODUCTION
The Dynamic Vision Sensor (DVS), which stems
from the research field of neuromorphic engineering,
emulates key aspects of the human retina. This results
in a basically different output paradigm compared to
classic image sensors. A DVS does not operate at a
fixed frame rate. Only local brightness changes in the
scene are detected and directly transmitted. For this
purpose, the pixels of a DVS work independently and
asynchronously from each other. An output is gener-
ated as soon as a change in brightness above a defined
threshold has been detected.
In this context, the triggering of a single DVS-
pixel is called an “event”. Each of these events is
a tuple (x, y, t, p) which contains information about
the spatial (x, y) position of the active pixel in the
sensor array, a very precise timestamp t of trigger-
ing and a polarity indicator p, which encodes the di-
rection of the brightness change (from bright to dark
or vice versa). The output of a DVS is therefore an
information-rich, sparse stream of events with a vari-
a
https://orcid.org/0000-0001-5504-8472
able data rate that depends directly on the change in
the scene. An example of this stream is shown in Fig-
ure 1.
This DVS operating paradigm results in advanta-
geous characteristics, in terms of high time resolution,
low data redundancy and power consumption and a
very high dynamic range, which can be very useful
in outdoor measurement scenarios like monitoring or
autonomous driving.
The output of a Dynamic Vision Sensor is fun-
damentally different from a standard camera due
to the described operation paradigm (synchronous
and dense frame vs. asynchronous sparse event
stream). Therefore, well-established computer vision
approaches are not direct and natively applicable. In
this work, we evaluate different event representations
and deep learning networks to generate a multi-class
semantic segmentation of DVS event data.
For this challenge, we consider variants of con-
verting the DVS stream into single or multi-channel
images, a 3D voxelization approach as well as the di-
rect interpretation of the event stream as a 3D event
point cloud. We summarize our main contributions as
follows:
168
Bolten, T., Pohle-Fröhlich, R. and Tönnies, K.
Semantic Segmentation on Neuromorphic Vision Sensor Event-Streams Using PointNet++ and UNet Based Processing Approaches.
DOI: 10.5220/0011622700003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 4: VISAPP, pages
168-178
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

(a) Observed stimulus (b) Triggered DVS-Event
Stream
Figure 1: Visualization of DVS output concept (event po-
larity is color-coded; “on” in green and “off” in red).
• consideration of 3D DVS space-time event cloud
processing (Wang et al., 2019) and the extension
of (Bolten et al., 2022) to another dataset in the
application field of autonomous driving
• a systematic comparison of single-channel and
high-multichannel 2D event representation, as
well as 3D event stream voxelization
• and evaluation of a UNet (Ronneberger et al.,
2015) network structure to generate a semantic
segmentation on these representations.
The pre-processed datasets as well as the gener-
ated network predictions are available for download
1
to support further comparisons and research.
The rest of this paper is structured as follows. Sec-
tion 2 outlines related work on semantic segmenta-
tions of neuromorphic event data. The evaluated event
representations and deep learning approaches are ex-
plained in Section 3. Section 4 presents the used
datasets, the performed data pre-processing, the train-
ing configurations and summarizes the evaluation re-
sults we obtained. Finally, a brief summary is pro-
vided in Section 5.
2 RELATED WORK
Although Dynamic Vision Sensors are a relatively
new type of sensor technology, they are already being
used in a variety of applications. For example, this
includes real-time vibration measurements and con-
trol applications (Dorn et al., 2017) related to indus-
trial applications, applications in the context of au-
tonomous driving (Chen et al., 2020) or the use in
space surveillance applications (McMahon-Crabtree
and Monet, 2021). The goal of this work is to derive a
semantic segmentation of the DVS event stream. This
means that a object class label will be assigned to each
DVS event.
1
http://dnt.kr.hsnr.de/DVS-UNetSemSeg/
In (Sekikawa et al., 2019) the authors have intro-
duced the so-called EventNet. It is as neural network
designed for the processing of asynchronous event
streams in an event-wise manner which is capable to
produce a semantic segmentation. Their approach is
based on an adaption of a single PointNet structure
(Qi et al., 2017a) which is made real-time capable by
recursive processing of events and precomputed look-
up tables. By design it is not capable to extract hier-
archical features from the data. For this reason, and
because we are not targeting real-time capability, we
did not consider this approach further. Instead, we ex-
amine PointNet’s successor, PointNet++ in its vanilla
form.
The EvDistill approach presented by (Wang et al.,
2021) is based on a student-teacher network de-
sign to overcome the hurdle of missing large-scale,
qualitatively labeled datasets. A teacher network is
trained on large-scale, labeled image data where the
student network learns on unlabeled and unpaired
event data by knowledge distillation. Because not all
datasets considered in our work provide classical im-
ages (source modality) for the teacher, we have not
considered this approach further.
An Xception based encoder-decoder architecture
is used in EV-SegNet by (Alonso and Murillo, 2019)
to obtain a semantic segmentation. For this purpose, a
dense 6-channel 2D frame representation of the event
stream is used. They also provide a labeled dataset
from the autonomous driving domain. We use this
dataset and compare our UNet-based results with their
results.
In (Bolten et al., 2022) an evaluation of a semantic
event-wise segmentation utilizing different data scal-
ing variations and network configurations based on
PointNet++ is presented. In our work, we extend
this comparison to another dataset. Furthermore, we
consider more event representations and replace their
MaskRCNN based 2D reference processing to UNet
based approaches.
In the literature, DVS event streams are often pro-
cessed by converting them to classic 2D frame rep-
resentations, which are then further processed using
well-known off-the-shelf computer vision techniques.
For example, frame conversion is performed in (Chen
et al., 2019; Jiang et al., 2019; Wan et al., 2021), and
then a Yolo-based approach is used. Furthermore, a
variety of other possible event representations have
developed. A larger set of these representations will
be considered and examined in this study. There-
fore, further details as well as literature references are
given in the following Subsection 3.1.
Semantic Segmentation on Neuromorphic Vision Sensor Event-Streams Using PointNet++ and UNet Based Processing Approaches
169

(a) (x × y × 1)
Single gray 2D frame
representation
(b) (x × y × t
channel
)
Highly multi-dimensional
2D frame build by
time-splitting
(c) (x × y × t
bin
× 1)
3D Voxelization (half
shown, for better clarity)
(d) Plain 3D (x, y, t)
space-time event cloud
Figure 2: Graphical rendering of the considered basic event representations ideas.
3 PROPOSED METHOD
The DVS event representations used in this work as
well as the 2D and 3D deep learning network struc-
tures are presented and outlined in the following.
3.1 Event Representations
The event output stream from a Dynamic Vision Sen-
sor is often converted into alternative representations
for processing. In our work, we consider the subse-
quent 2D as well as 3D representations and compare
the achieved results in the subsequent processing.
2D Frame Representation: The DVS event stream
is converted to classic 2D frame representations
by projection along the time axis. Typically, ei-
ther a fixed time window or a fixed number of
events is considered to construct the frame (Liu
and Delbr
¨
uck, 2018). For this conversion, there
are a variety of encoding rules that also aim to
consider the time resolution included in the DVS
stream (Lagorce et al., 2017; Mitrokhin et al.,
2018).
As a baseline for comparing the following encod-
ings, we consider only the binary projection of the
event stream as a pure 2D frame encoding in this
work (compare with Figure 2a), resulting in a rep-
resentation of shape (x × y × 1).
Multi-Channel 2D Frame Representation: Within
this projection of the DVS stream, classical 3-
channel RGB images could also be generated, e.g.
by color coding of the event polarities. In addi-
tion, there are also various other approaches that
encode different aspects of the DVS stream in
non-intuitive multichannel images. The “Merged-
Three-Channel” representation defined in (Wan
et al., 2021) is an example of such an encoding.
In this representation, information about the event
frequency, the timestamps and continuity are rep-
resented in individual image channels.
Within our work, we aim to better represent and
exploit the temporal context of the DVS stream.
Therefore, we consider as an input encoding
a highly multidimensional representation of the
DVS data. Here, the time component of the signal
is separated and stored in many channels during
projection, resulting in a representation of shape
(x × y × t
channel
). A visualization is given in Fig-
ure 2b.
3D Voxel-Grid Representation: Another approach
to maintain and better preserve the high temporal
resolution of the DVS event stream is the inter-
pretation as a 3D spatio-temporal volume. Vox-
elization of this volume encodes the distribution
of events within the spatio-temporal domain (Zhu
et al., 2019; Chaney et al., 2019). This type of
representation is also often used as an intermedi-
ate encoding to convert the event stream into other
forms, such as graphs (Deng et al., 2022).
We form time voxels per pixel in our work, as we
discretize the time dimension per pixel into t
bin
bins to include and consider fine spatial structures.
This discretization leads to a data representation
of shape (x × y × t
bin
× 1) which encodes the oc-
currence of an event per voxel. A visualization is
given in Figure 2c.
3D (x, y, t) Space Time Event Cloud Representa-
tion: In the previously described representation
as a voxel grid, the sparsity of the event stream is
lost in the encoding. This property and the high
resolution of the time information is preserved
when interpreting the DVS data as a 3D (x, y, t)
space-time event cloud. In this way, the spatio-
temporal information is directly encoded as geo-
metric neighborhood information (compare with
Figure 2d).
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
170

(a) Farthest Point
Sampling (input from
Figure 2d)
(b) Subset of Ball-Query
Neighborhood selections
(c) Abstracted Event Set
of Layer 1
...
(d) Abstracted Event Set
Layer 2
Figure 3: Summary of PointNet++ processing concept.
By applying point set processing methods, such
as PointNet++ (Qi et al., 2017b), DVS data can be
processed directly (Wang et al., 2019; Sekikawa
et al., 2019; Mitrokhin et al., 2020; Bolten et al.,
2022).
3.2 Network Architectures
In this work we compare 3D and 2D event representa-
tions and processing approaches using the following
deep learning networks:
PointNet++. Hierarchical feature learning
PointNet++ (Qi et al., 2017b) learns a spatial en-
coding of point cloud data. For this purpose, the
input data is hierarchically divided and summa-
rized. By the respective application of a simple
PointNet (Qi et al., 2017a) as a feature extractor,
local and global features are built and combined.
This results finally in a representation of the entire
point cloud.
This hierarchical process is realized by so called
Set Abstraction Layers (SA) of the network. First
representative centroid points of local regions
are selected by a farthest point sampling (Figure
3a). Subsequently local neighboring points are
selected around these centroids. By default, this
is performed via a ball query which finds an up-
per limited set of points within a defined radius
(Figure 3b). The extracted pattern feature vectors
of these local regions will be geometrically repre-
sented by the centroid coordinates (Figure 3c for
the first and 3d for the subsequent second layer).
This approach to create common structure parti-
tions allows sharing the weights of the feature ex-
tractors per network layer. This leads to relatively
small networks.
In the case of semantic segmentation, the resulting
features are finally interpolated by a Feature Prop-
agation Layer (FP) to produce point-wise values.
UNet. Convolutional Networks for Biomedical Im-
age Segmentation
The UNet architecture (Ronneberger et al., 2015)
has its origin in medical image segmentation,
but was successfully applied to a various field
of applications (Pohle-Fr
¨
ohlich. et al., 2019;
McGlinchy et al., 2019; Liu and Qian, 2021). It
is a convolutional neural network that produces a
precise pixel-by-pixel segmentation.
The architecture follows a division into an en-
coder and a decoder part. Within the encoder, spa-
tial resolution is reduced by convolution and max-
pooling, while the number of feature channels is
increased. This extracts high-resolution and deep
features about the context. In the second part, the
decoder, the original resolution is restored by up-
sampling. By increasing the resolution of the out-
put in this way, the decoder learns to create an out-
put with precise localization. UNet architecture
combines the feature channels from this down and
upsampling by skip connections, allowing the net-
work to propagate and combine context and local-
ization information.
The visualization of an example configuration is
given in Figure 5.
4 EXPERIMENTS
Initially, the used datasets are introduced and the per-
formed data preprocessing is summarized. In the fol-
lowing, the hyper-parameters and the specific network
layer and training configurations are presented. Sub-
sequently the description of the used metric, as well
as the achieved results, including a brief discussion
and summary is given.
4.1 Datasets
In comparison to classical frame-based computer vi-
sion, there is currently a significantly lower number of
event-based datasets available. This is particularly ev-
ident with the requirement for annotations at the level
Semantic Segmentation on Neuromorphic Vision Sensor Event-Streams Using PointNet++ and UNet Based Processing Approaches
171

(a)
PERSON
(b) DOG
(c)
BICYCLE
(d)
SPORTS-
BALL
(e) BIRD
(f) INSECT (g) TREE
CROWN
(h) TREE
SHADOW
(i) RAIN (j) BACK-
GROUND
Figure 4: False-color DVS-OUTLAB class examples (re-
produced from (Bolten et al., 2022) with permission from
the authors).
of semantic segmentation.
Most large-scale datasets like GEN1 (de Tourne-
mire et al., 2020) or even smaller datasets (Miao et al.,
2019) contain object labels only at the level of pro-
vided bounding boxes to achieve an object detection,
but do not provide labels for a semantic segmentation.
We therefore limited our comparison to the two
datasets below, which provide those annotations in a
multi-class scenario.
DVS-OUTLAB: This dataset (Bolten et al., 2021)
contains recordings of a DVS-based long-time
monitoring of an urban outdoor place. For this
purpose, three CeleX-IV sensors (Guo et al.,
2017) were used. These recordings offer a total
spatial resolution of 768 × 512 pixels.
The dataset contains semantic label annotations
for about 47k regions of interest, separated into
70/15/15% sets for test, train and evaluation. Each
region of interest with a spatial size of 192 × 128
pixels contains events and labels for a sequence of
60ms length of the underlying DVS event stream.
The labeling takes 10 different classes into
account, including different object classes, as
well as environmental noise originating from the
outdoor-setup of the measurement (compare with
Figure 4). The labels are provided on a per event-
basis.
Subset of DDD17 Sequences: The authors of the
Ev-SegNet approach (Alonso and Murillo, 2019)
published with their work a subset of the DDD17
dataset (Binas et al., 2017) extended by semantic
labels.
The DDD17 dataset contains sequences of record-
ings obtained from a moving car in traffic (com-
pare to Figure 6). These recording were taken
with a DAVIS346B Dynamic Vision Sensor, of-
fering a spatial resolution of 346×260 pixels. The
data was cropped to 346×200 pixels, as the lower
60-pixel rows included the dashboard of the car.
The dataset contains 15950 sequences for train-
ing and 3890 for testing, each corresponding to
a 50ms section of the event stream. For these
sequences, the authors automatically generated
pixel-wise semantic labels based on gray-scale
images from the DAVIS sensor by applying a
CNN. Thereby six different classes were consid-
ered: (1) construction/sky, (2) objects (like street
signs or light poles), (3) nature (like trees), (4) hu-
mans, (5) vehicles and (6) street. These labels are
provided as dense 2D frames.
4.2 Data Preprocessing
The following pre-processing was performed to pre-
pare the datasets and generate the presented event rep-
resentation:
Subset of DDD17 Sequences: The DVS event data
was published by (Alonso and Murillo, 2019) in
the form that only a 2D frame representation of
the event stream is directly available. Further-
more, the generated labels are also only avail-
able in the form of 2D frames. Thus, they
are not directly usable for the generation of our
proposed multi-channel, voxel or 3D space-time
event cloud representation.
Therefore, utilizing the native DDD17 event
stream recordings, we first propagated the labels
of the EvSegNet subset back to the original event
stream. This results in annotations per event in
the form of (x, y, t, p, label). For each 50ms of
the event stream the corresponding 2D label was
transferred to all underlying events at the same
spatial position within this time window.
DVS-OUTLAB: The labeling of this dataset is al-
ready available in the form of a semantic annota-
tion per event. Therefore, no adaption of the label
representation was necessary.
The 3D (x, y, t) space-time event cloud representa-
tion is built natively direct from the event stream. For
the remaining 2D and voxel representations, an inter-
mediate numpy-array was calculated. For this pur-
pose, a 3D voxel histogram was generated per pixel-
position, splitting the time axis into 64 components
(t
channel
and t
bin
in Figure 2). The labels were trans-
formed into an equivalent voxel form. By applying
numpy-operations a convenient transformation into
the proposed 2D representations is possible
2
. This
pre-processed data is available for download.
2
The fast transformation from 3D voxels to the pro-
posed 2D frame representations could be done by simple
reshape and/or amax operations.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
172
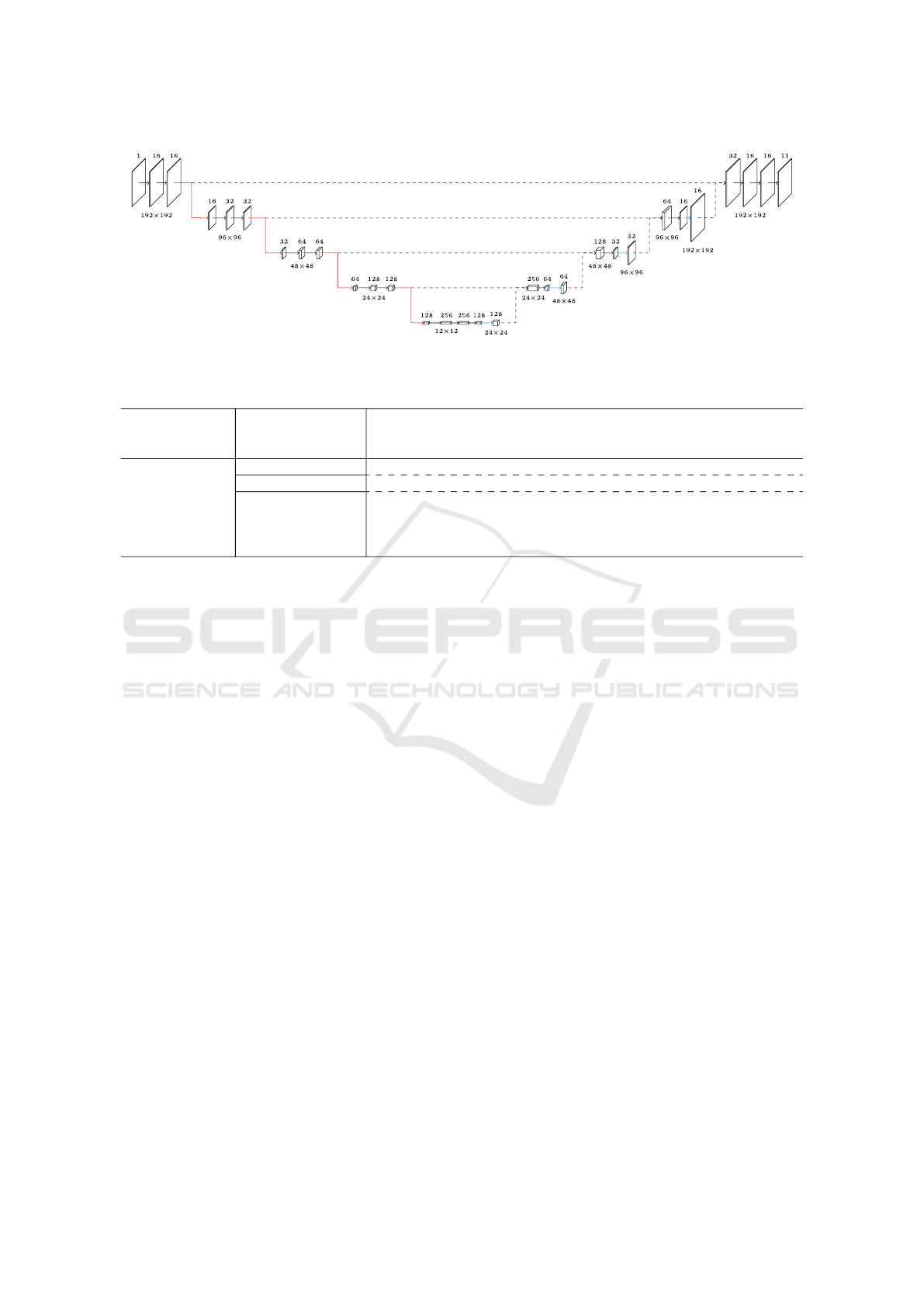
Figure 5: UNet 2D configuration example for DVS-OUTLAB dataset (10 object classes plus the “void” for regions without
any event).
Table 1: PointNet++ configuration summary (compare to syntax used in (Qi et al., 2017b)).
DVS-OUTLAB PNet++(4096, 3L)
SA(2048, 9.6, [32, 32, 64]) → SA(256, 28.8, [64, 64, 128]) →
SA(16, 76.8, [128, 128, 256]) → FP([256, 256]) → FP([256, 128]) →
FP([128, 128, 128, 128, 10])
DDD17
PNet++(4096, 5L)
SA(2048, 17.3, [32, 32, 64]) →
PNet++(8192, 5L)
SA(4096, 17.3, [32, 32, 64]) →
followed by
SA(1024, 34.6, [64, 64, 128]) → SA(256, 69.2, [128, 128, 256]) →
SA(64, 103.8, [256, 256, 512]) → SA(16, 138.4, [512, 512, 1024]) →
FP([256, 256]) → FP([256, 128]) → FP([256, 256]) →
FP([256, 128]) → FP([128, 128, 128, 128, 6])
The division into 64-time components is selected
so that in the subsequent logic of UNet processing,
the choice of the input dimension as a power of two
leads to integer dimensions in the downsampling and
upsampling logic. Furthermore, the spatial resolution
was extended by zero-padding into quadratic inputs
for the UNet processing. This results in 192 × 192
pixel resolution for the DVS-OUTLAB data and to
346 × 346 pixel for the DDD17 subset. In the repre-
sentations, the presence or absence of events per spa-
tial position is encoded by the numerical value 255 or
0.
Moreover, we created and tested two variations
for each of the datasets. One plain version, that in-
cludes all events and one that was spatio-temporal
pre-filtered to reduce included sensor background
noise and to estimate the effects of noise reduction
for the semantic processing. For this purpose, a time
filter was applied to remove all events that were not
supported by another event at the same (x, y) coor-
dinate within the previous 10ms. This type of filter
has shown a reasonable trade-off between noice re-
duction and preservation of object events (compare to
performed evaluation in (Bolten et al., 2021)).
4.3 Training
The following network layer configurations and train-
ing hyper-parameters were used in our experiments:
PointNet++. For the PointNet++ training configura-
tion we followed the selected hyper-parameters
from (Bolten et al., 2022). This results in us-
ing the Adam optimizer with a learning rate of
0.001 and an exponential decay rate of 0.99 ev-
ery 200.000 trainings steps. The batch size was
set to 16 space time event clouds.
For the DVS-OUTLAB dataset we follow also
their data patching and scaling scheme (S
T
native
),
layer depth and set abstraction configuration. In
case of the DDD17 data, we adapted the net-
work configuration due to the larger spatial input
dimension (346 × 200 pixel vs 192 × 128 pixel
per region) to address the resulting higher event
count. Additional we trained and tested two Point-
Net++ configurations with a previous subsam-
pling to 8192, respectively 4096 events.
The specific PointNet++ configuration used for
training is summarized in Table 1.
UNet. The UNet trainings were carried out utilizing
an Adam optimizer with a learning rate of 0.001
and an exponential decay with a rate of 0.99 af-
ter each epoch. The batch size was set to 6 sam-
ples. A sparse categorical cross entropy weighted
by the class occurrence frequency was chosen as
the loss function to address the class imbalances
included in the datasets.
In all performed UNet experiments the model is
built with a depth of 4 layers and a number of 16
filters in the first block, which are multiplied by
2 in each subsequent block. The kernel size in
Semantic Segmentation on Neuromorphic Vision Sensor Event-Streams Using PointNet++ and UNet Based Processing Approaches
173

(a) 2D Labels
(b) Corresponding Events
(c) 2D Labels
(d) Corresponding Events
Figure 6: Ev-SegNet DDD17 subset: dense label compared
to sparse event stream.
the 2D or respective 3D-convolutions were set to
three. A used 2D UNet example configuration is
shown in Figure 5 as reference.
4.4 Metric
In the literature, and this is also the case for event
cameras as in (Alonso and Murillo, 2019), the eval-
uation is often performed on the basis of dense 2D
frames. For each 2D pixel of the annotation the cor-
responding pixel value of the network prediction is
considered and compared. But this type of evaluation
ignores the basic property of a Dynamic Vision Sen-
sor that the produced event stream is spatially sparse.
This is clearly illustrated by Figure 6, which shows
two scenes from the DDD17 data subset. In Subfig-
ure (a, b) a scene with limited or without movement is
shown, whereas Subfigure (c, d) displays a scenes of
higher speed. Within a slow scene only a few events
are triggered and even with faster movements, there
are many areas where no or only a few events were
triggered as well.
Networks operating on a sparse representation,
such as the used PointNet++, cannot predict results
at positions where no events were triggered. There-
fore, a proper comparison on this dense 2D basis is
not possible. Furthermore, this type of 2D compar-
ison ignores the fact, that at one spatial (x, y) posi-
tion multiple events could have been triggered within
the selected time window. Therefore, we consider
in our evaluation only spatial positions where events
were triggered. Furthermore, the number of triggered
events for each predicted label is also taken into ac-
count.
In contrast to PointNet++, for the UNet based pro-
cessing approaches, it is possible that a class pre-
diction occurs at a spatial position where no DVS
Table 2: Weighted-Avg F1 results on DVS-OUTLAB
dataset.
Network
Back-
ground
Objects
Env-Influ
ences
Over-All
(a) PointNet++ reference results
PNet(4096, 3L) 0.968 0.816 0.853 0.936
(b) Unfiltered UNet results
UNet 2D 0.951 0.842 0.764 0.902
UNet 2D 64ch 0.958 0.847 0.780 0.912
UNet 3D Voxel 0.941 0.843 0.775 0.895
(c) Spatio-temporal filtered (time 10ms) UNet results
UNet 2D 0.925 0.838 0.757 0.868
UNet 2D 64ch 0.938 0.850 0.826 0.897
UNet 3D Voxel 0.928 0.843 0.809 0.883
event has been triggered (the “void” background). To
take account for this we perform the following simple
post-processing before evaluation:
If an object class prediction is made but no event
is present (pred 6= void ∧ event =
/
0), this predic-
tion is interpreted as void and ignored. In case that
no object class prediction is made but an event is
present (pred = void ∧ event 6=
/
0), this prediction is
re-interpreted and considered as the dominating back-
ground class for evaluation (class background for
DVS-OUTLAB, construction/sky for DDD17).
Considering the number of triggered DVS events
we then calculate the F1 score, which is described as
the harmonic mean of precision and recall:
F1-Score =
T P
T P + 0.5 · (FP + FN)
To summarize the results, we also calculated weighted
averages taking the number of each class’s support
into consideration (Weighted-Avg F1).
For a fair comparison of the 3D and 2D methods
(different counts of predictions and therefore a higher
number of possible errors in case of higher output
dimension) we equalize all generated predictions for
evaluation. The 3D predictions are projected along
the t-axis by considering the most frequent prediction
at each spatial position for comparison with the 2D
results.
4.5 Evaluation
The evaluation results of the PointNet++ processing,
as well as the results for the different event repre-
sentations in combination with the 2D and 3D UNet
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
174
processing for the DVS-OUTLAB dataset are sum-
marized in Table 2. The PointNet++ based process-
ing achieves the better segmentation results on this
dataset compared to the 2D or 3D voxel UNet pro-
cessing. This is consistent to the PointNet++ and 2D
MaskRCNN comparison presented in (Bolten et al.,
2022).
The summary of results for the subset of labeled
DDD17 dataset sequences is given in Table 3. On this
dataset, PointNet++ processing achieves weaker re-
sults in contrast to the UNet variations and the dataset
authors’ Ev-SegNet reference. A noticeable differ-
ence exists here in the results of the class ”Objects”
in the PointNet++ based processing. This class of the
dataset contains, for example, lampposts, street signs
or traffic lights. Although the PointNet++ configura-
tions used here were adjusted in the number of points
to be considered in the input cloud and the first SetAb-
straction layer, as well as the layer count itself, this
suggests that such fine details were not fully captured.
Due to the high number of triggered events in the au-
tonomous driving context of this dataset (compared
to a static sensor in DVS-OUTLAB monitoring) and
the larger spatial input (346 × 200 pixel vs 192 × 128
pixel), the encode/decoder approach to UNet process-
ing seems to have an advantage.
The PointNet++ processing, on the other hand, re-
lies on considering sufficient representative events se-
lected by farthest point sampling and corresponding
neighborhood formation. Please compare to Figure 3,
especially (a) and b, which summarizes the basic idea
of PointNet++ processing.
However, when considering the overall results on
the DDD17 subset, the given quality of the ground
truth label must be considered. These labels were
generated by (Alonso and Murillo, 2019) through an
automatic processing. Out of a total of nearly 12
hours of material from the DDD17 dataset, about 15
minutes were labeled in this way, and the GT labels
obtained are not completely accurate and consistent
over time. Figure 7 gives an example of included ar-
tifacts in the GT labels using two examples that are
separated by a short period of time. The annotations
of the included traffic sign and the tree (marked by
red arrows) varies, although, for example, the UNet
predictions are correct.
Overall, across both datasets, it can be observed
that UNet-based processing achieves better results
on unfiltered raw data than on spatio-temporal pre-
filtered data. In general, an improvement of the UNet
based results can be observed with an increase of
the dimensionality of the event representation used.
Whereas the use of the 3D voxel grid brings only mi-
nor differences in comparison.
Table 3: Results on subset of DDD17 dataset.
Network
Construc-
tion
Objects
Nature
Human
Vehicle
Street
Macro-
Avg
Weighted-
Avg
(a) Ev-SegNet baseline (Alonso and Murillo, 2019), metric recalculated to match proposed evaluation
Ev-SegNet 0.916 0.229 0.712 0.670 0.850 0.727 0.696 0.876
(b) PointNet++ results
PNet(8192, 5L) 0.842 0.088 0.516 0.398 0.743 0.619 0.534 0.771
PNet(4092, 5L) 0.840 0.103 0.521 0.464 0.748 0.600 0.546 0.766
(c) Unfiltered UNet results
UNet 2D 0.886 0.266 0.686 0.577 0.835 0.703 0.659 0.829
UNet 2D 64ch 0.895 0.285 0.723 0.533 0.849 0.723 0.668 0.843
UNet 3D Voxel 0.898 0.301 0.729 0.572 0.847 0.719 0.678 0.843
(d) Spatio-temporal filtered (time 10ms) UNet results
UNet 2D 0.882 0.265 0.673 0.557 0.846 0.660 0.647 0.826
UNet 2D 64ch 0.896 0.289 0.713 0.590 0.862 0.681 0.672 0.846
UNet 3D Voxel 0.895 0.296 0.713 0.568 0.858 0.680 0.668 0.843
Semantic Segmentation on Neuromorphic Vision Sensor Event-Streams Using PointNet++ and UNet Based Processing Approaches
175
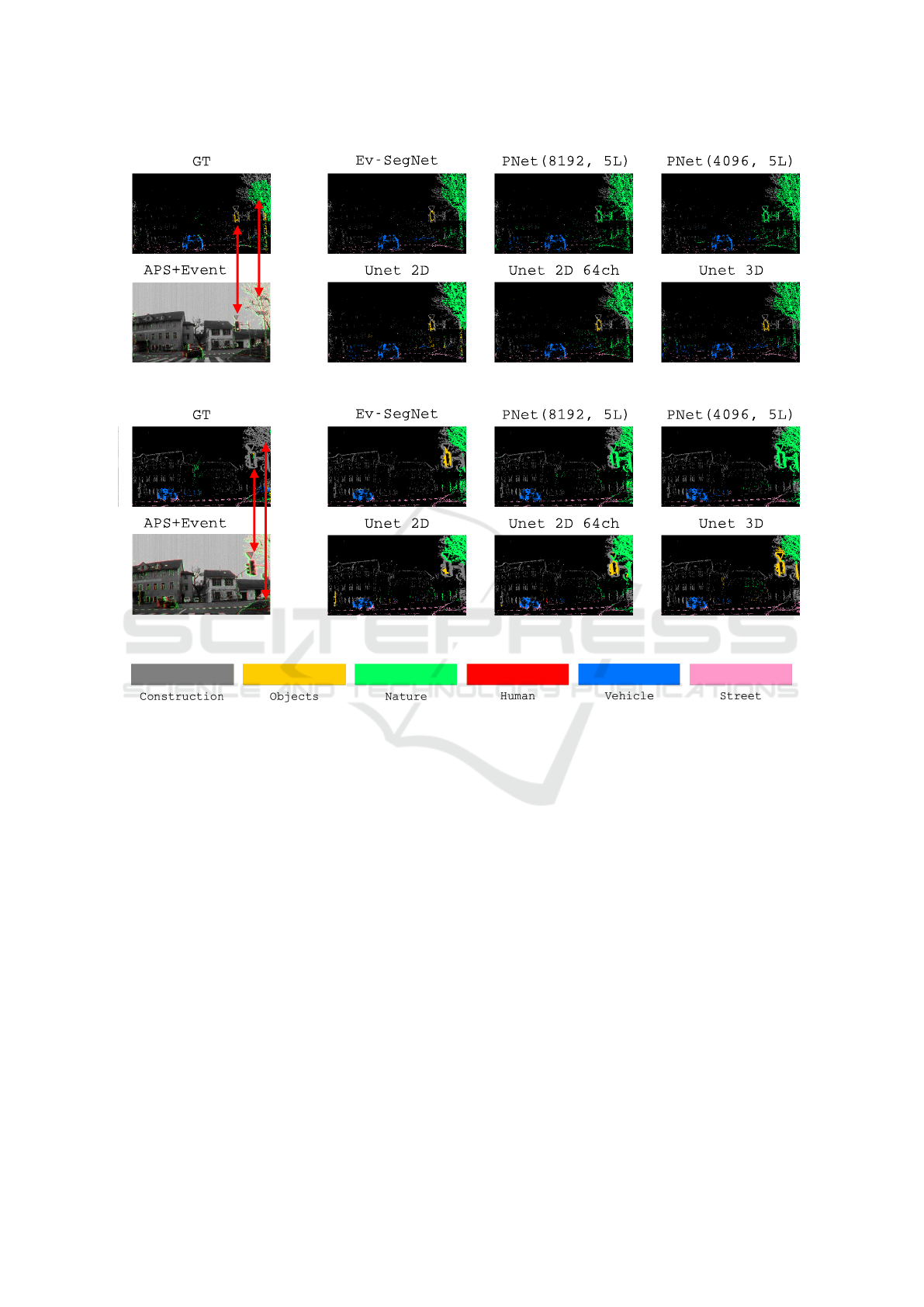
(a) Ground truth vs prediction at t
i
(b) Ground truth vs prediction at t
i
+ 1.25 sec
Figure 7: Visualization of GT labeling quality of DDD17 subset from (Alonso and Murillo, 2019) and predictions of trained
networks. Note the inconsistent GT labeling of the marked traffic sign and trees between the timestamps shown. (best viewed
in color and digital zoomed)
5 CONCLUSION
The improvement in the UNet prediction quality us-
ing the highly multi-channel event representation over
the single 2D frame variant indicates a benefit of the
more complex representation. Whereas the use of 3D
voxel grids also achieves good results (compare ex-
emplarily with the results shown in Figure 7). Un-
fortunately, the associated UNet network structure is
larger due to the 3D convolutions and therefore slower
for inference.
The sensor property of a DVS to produce an out-
put stream that is spatially sparse becomes particu-
larly clear when statistically examining the used voxel
representation. Over the two complete data sets, only
about 0.45% of the voxels are populated by an event
(corresponding 99.55% of the voxels considered are
empty). A classical UNet based on simple 3D con-
volutions already achieves good results on this voxel
representation - and this despite the fact that the ap-
plication of these convolutions quickly increases and
“blurs” the set of active (non-zero) features. There-
fore the usage of sparse convolutions (Graham and
van der Maaten, 2017) and the adaption of the UNet
network into a sparse voxel network for semantic seg-
mentation (Graham et al., 2018; Najibi et al., 2020) is
an interesting task for further work.
In summary, differences between the evaluated
network structures have also emerged. A PointNet++
based processing is better suited for scenes without
ego-motion of the sensor, whereas for moving sen-
sors and the inclusion of larger spatial input patches a
UNet based processing has shown advantages.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
176

ACKNOWLEDGEMENTS
We thank Christian Neumann for helpful discussions
and his support related to the UNet development and
experiments.
Funding
This work was supported by the European Re-
gional Development Fund under grant number
EFRE0801082 as part of the project “plsm” (https:
//plsm-project.com/).
REFERENCES
Alonso, I. and Murillo, A. C. (2019). EV-SegNet: Seman-
tic Segmentation for Event-Based Cameras. In 2019
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition Workshops (CVPRW), pages 1624–
1633.
Binas, J., Neil, D., Liu, S.-C., and Delbruck, T. (2017).
DDD17: End-To-End DAVIS Driving Dataset. In
ICML’17 Workshop on Machine Learning for Au-
tonomous Vehicles (MLAV 2017).
Bolten, T., Lentzen, F., Pohle-Fr
¨
ohlich, R., and T
¨
onnies,
K. D. (2022). Evaluation of Deep Learning based
3D-Point-Cloud Processing Techniques for Seman-
tic Segmentation of Neuromorphic Vision Sensor
Event-streams. In Proceedings of the 17th Interna-
tional Joint Conference on Computer Vision, Imag-
ing and Computer Graphics Theory and Applica-
tions - Volume 4: VISAPP, pages 168–179. INSTICC,
SciTePress.
Bolten, T., Pohle-Fr
¨
ohlich, R., and T
¨
onnies, K. D. (2021).
DVS-OUTLAB: A Neuromorphic Event-Based Long
Time Monitoring Dataset for Real-World Outdoor
Scenarios. In Proceedings of the IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition
(CVPR) Workshops, pages 1348–1357.
Chaney, K., Zhu, A. Z., and Daniilidis, K. (2019). Learning
Event-Based Height From Plane and Parallax. In 2019
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition Workshops (CVPRW), pages 1634–
1637.
Chen, G., Cao, H., Conradt, J., Tang, H., Rohrbein, F., and
Knoll, A. (2020). Event-Based Neuromorphic Vision
for Autonomous Driving: A Paradigm Shift for Bio-
Inspired Visual Sensing and Perception. IEEE Signal
Processing Magazine, 37(4):34–49.
Chen, G., Cao, H., Ye, C., Zhang, Z., Liu, X., Mo, X., Qu,
Z., Conradt, J., R
¨
ohrbein, F., and Knoll, A. (2019).
Multi-Cue Event Information Fusion for Pedestrian
Detection With Neuromorphic Vision Sensors. Fron-
tiers in Neurorobotics, 13:10.
de Tournemire, P., Nitti, D., Perot, E., Migliore, D., and
Sironi, A. (2020). A Large Scale Event-based Detec-
tion Dataset for Automotive. arXiv, abs/2001.08499.
Deng, Y., Chen, H., Liu, H., and Li, Y. (2022). A Voxel
Graph CNN for Object Classification With Event
Cameras. In Proceedings of the IEEE/CVF Confer-
ence on Computer Vision and Pattern Recognition
(CVPR), pages 1172–1181.
Dorn, C., Dasari, S., Yang, Y., Kenyon, G., Welch, P.,
and Mascare
˜
nas, D. (2017). Efficient full-field opera-
tional modal analysis using neuromorphic event-based
imaging. In Shock & Vibration, Aircraft/Aerospace,
Energy Harvesting, Acoustics & Optics, Volume 9,
pages 97–103. Springer.
Graham, B., Engelcke, M., and van der Maaten, L. (2018).
3D Semantic Segmentation with Submanifold Sparse
Convolutional Networks. CVPR.
Graham, B. and van der Maaten, L. (2017). Submani-
fold Sparse Convolutional Networks. arXiv preprint
arXiv:1706.01307.
Guo, M., Huang, J., and Chen, S. (2017). Live demon-
stration: A 768 × 640 pixels 200meps dynamic vi-
sion sensor. In 2017 IEEE International Symposium
on Circuits and Systems (ISCAS), pages 1–1.
Jiang, Z., Xia, P., Huang, K., Stechele, W., Chen, G., Bing,
Z., and Knoll, A. (2019). Mixed Frame-/Event-Driven
Fast Pedestrian Detection. In 2019 International Con-
ference on Robotics and Automation (ICRA), pages
8332–8338.
Lagorce, X., Orchard, G., Galluppi, F., Shi, B. E., and
Benosman, R. B. (2017). HOTS: A Hierarchy of
Event-Based Time-Surfaces for Pattern Recognition.
IEEE Transactions on Pattern Analysis and Machine
Intelligence, 39(7):1346–1359.
Liu, M. and Delbr
¨
uck, T. (2018). Adaptive Time-Slice
Block-Matching Optical Flow Algorithm for Dynamic
Vision Sensors. In 29th British Machine Vision Con-
ference (BMVC).
Liu, M. and Qian, P. (2021). Automatic Segmentation
and Enhancement of Latent Fingerprints Using Deep
Nested UNets. IEEE Transactions on Information
Forensics and Security, 16:1709–1719.
McGlinchy, J., Johnson, B., Muller, B., Joseph, M., and
Diaz, J. (2019). Application of UNet Fully Convo-
lutional Neural Network to Impervious Surface Seg-
mentation in Urban Environment from High Resolu-
tion Satellite Imagery. In IGARSS 2019 - 2019 IEEE
International Geoscience and Remote Sensing Sympo-
sium, pages 3915–3918.
McMahon-Crabtree, P. N. and Monet, D. G. (2021).
Commercial-off-the-shelf event-based cameras
for space surveillance applications. Appl. Opt.,
60(25):G144–G153.
Miao, S., Chen, G., Ning, X., Zi, Y., Ren, K., Bing, Z., and
Knoll, A. (2019). Neuromorphic Vision Datasets for
Pedestrian Detection, Action Recognition, and Fall
Detection. Frontiers in Neurorobotics, 13:38.
Mitrokhin, A., Ferm
¨
uller, C., Parameshwara, C., and Aloi-
monos, Y. (2018). Event-Based Moving Object De-
tection and Tracking. In 2018 IEEE/RSJ International
Conference on Intelligent Robots and Systems (IROS),
pages 6895–6902.
Semantic Segmentation on Neuromorphic Vision Sensor Event-Streams Using PointNet++ and UNet Based Processing Approaches
177

Mitrokhin, A., Hua, Z., Ferm
¨
uller, C., and Aloimonos, Y.
(2020). Learning visual motion segmentation using
event surfaces. In 2020 IEEE/CVF Conference on
Computer Vision and Pattern Recognition (CVPR),
pages 14402–14411.
Najibi, M., Lai, G., Kundu, A., Lu, Z., Rathod, V.,
Funkhouser, T., Pantofaru, C., Ross, D., Davis, L. S.,
and Fathi, A. (2020). DOPS: Learning to Detect 3D
Objects and Predict Their 3D Shapes. In Proceedings
of the IEEE/CVF Conference on Computer Vision and
Pattern Recognition (CVPR).
Pohle-Fr
¨
ohlich., R., Bohm., A., Ueberholz., P., Korb., M.,
and Goebbels., S. (2019). Roof Segmentation based
on Deep Neural Networks. In Proceedings of the 14th
International Joint Conference on Computer Vision,
Imaging and Computer Graphics Theory and Applica-
tions - Volume 4: VISAPP,, pages 326–333. INSTICC,
SciTePress.
Qi, C. R., Su, H., Mo, K., and Guibas, L. J. (2017a). Point-
Net: Deep Learning on Point Sets for 3D Classifi-
cation and Segmentation. In 2017 IEEE Conference
on Computer Vision and Pattern Recognition (CVPR),
pages 77–85.
Qi, C. R., Yi, L., Su, H., and Guibas, L. J. (2017b). Point-
Net++: Deep Hierarchical Feature Learning on Point
Sets in a Metric Space. In Proceedings of the 31st
International Conference on Neural Information Pro-
cessing Systems, NIPS’17, pages 5105–5114, Red
Hook, NY, USA. Curran Associates Inc.
Ronneberger, O., Fischer, P., and Brox, T. (2015). U-Net:
Convolutional Networks for Biomedical Image Seg-
mentation. In Navab, N., Hornegger, J., Wells, W. M.,
and Frangi, A. F., editors, Medical Image Comput-
ing and Computer-Assisted Intervention – MICCAI
2015, pages 234–241, Cham. Springer International
Publishing.
Sekikawa, Y., Hara, K., and Saito, H. (2019). EventNet:
Asynchronous Recursive Event Processing. In 2019
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition (CVPR), pages 3882–3891.
Wan, J., Xia, M., Huang, Z., Tian, L., Zheng, X., Chang, V.,
Zhu, Y., and Wang, H. (2021). Event-Based Pedes-
trian Detection Using Dynamic Vision Sensors. Elec-
tronics, 10(8:888).
Wang, L., Chae, Y., Yoon, S.-H., Kim, T.-K., and Yoon,
K.-J. (2021). EvDistill: Asynchronous Events To
End-Task Learning via Bidirectional Reconstruction-
Guided Cross-Modal Knowledge Distillation. In Pro-
ceedings of the IEEE/CVF Conference on Computer
Vision and Pattern Recognition (CVPR), pages 608–
619.
Wang, Q., Zhang, Y., Yuan, J., and Lu, Y. (2019). Space-
Time Event Clouds for Gesture Recognition: From
RGB Cameras to Event Cameras. In 2019 IEEE Win-
ter Conference on Applications of Computer Vision
(WACV), pages 1826–1835.
Zhu, A. Z., Yuan, L., Chaney, K., and Daniilidis, K. (2019).
Unsupervised Event-Based Learning of Optical Flow,
Depth, and Egomotion. In 2019 IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 989–997.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
178
