
Local Reflectional Symmetry Detection in Point Clouds Using a Simple
PCA-Based Shape Descriptor
Luk
´
a
ˇ
s Hruda
1 a
, Ivana Kolingerov
´
a
1 b
and David Podgorelec
2 c
1
Department of Computer Science and Engineering, Faculty of Applied Sciences, University of West Bohemia,
Univerzitn
´
ı 8, 301 00 Plze
ˇ
n, Czech Republic
2
Faculty of Electrical Engineering and Computer Science, University of Maribor, Koro
ˇ
ska cesta 46, 2000 Maribor, Slovenia
Keywords:
Symmetry, Local, Reflectional, PCA, Descriptor.
Abstract:
Symmetry is a commonly occurring feature in real world objects and its knowledge can be useful in various
applications. Different types of symmetries exist but we only consider the reflectional symmetry which is
probably the most common one. Multiple methods exist that aim to find the global reflectional symmetry of
a given 3D object and although this task on its own is not easy, finding symmetries of objects that are merely
parts of larger scenes is much more difficult. Such symmetries are often called local symmetries and they
commonly occur in real world 3D scans of whole scenes or larger areas. In this paper we propose a simple
PCA-based local shape descriptor that can be easily used for potential symmetric point matching in 3D point
clouds and, building on previous work, we present a new method for detecting local reflectional symmetries in
3D point clouds which combines the PCA descriptor point matching with the density peak location algorithm.
We show the results of our method for several real 3D scanned scenes and demonstrate its computational
efficiency and robustness to noise.
1 INTRODUCTION AND
RELATED WORK
Many objects in real world contain some form of
symmetry. By symmetry we understand a geometric
transformation that leaves a given object unchanged
excluding identity. Having a 3D object X a transfor-
mation T ̸= I is a symmetry of X if T (X) = X, i.e.
when after T is applied on X each point of the trans-
formed X ends up in any point of the original X . There
are different types of symmetry according to which
types of transformations are considered. In this pa-
per we only consider reflectional symmetry where the
transform T is a reflection over a plane and can be
represented by the reflection plane itself - the sym-
metry plane. Also, in reality, there is never a perfect
symmetry which means that we are ultimately inter-
ested in approximate reflectional symmetries where
the transform does not match the object onto intself
perfectly but only approximately. The term approx-
imate symmetry, however, does not seem to have an
a
https://orcid.org/0000-0002-9477-7464
b
https://orcid.org/0000-0003-4556-2771
c
https://orcid.org/0000-0002-0701-9201
exact formal definition.
The knowledge of symmetry has various appli-
cations, mostly in computer vision, such as incom-
plete object reconstruction (Sipiran et al., 2014), ob-
ject alignment (Li et al., 2016) or symmetrical editing
(Martinet et al., 2006). But before any application is
possible the symmetries first need to be found.
The field of symmetry detection has advanced a
lot in the past decades providing numerous methods
that aim to find the symmetry plane(s) of a given in-
put object. Such a task is difficult on its own but es-
pecially the modern methods are able to provide a ro-
bust, reliable and fast solutions that are often capable
of finding visually plausible symmetry planes in ob-
jects with very weak reflectional symmetries or with
missing geometry (like those in Fig. 2), they can work
with various types of data and can often solve the task
at hand in matters of seconds, sometimes even hun-
dreds or tens of milliseconds. Examples of such meth-
ods are (Martinet et al., 2006; Comb
`
es et al., 2008;
Sipiran et al., 2014; Li et al., 2016; Nagar and Raman,
2020; Hruda et al., 2022;
ˇ
Zalik et al., 2022). Still, like
in most fields, there is room for further improvements
since even the most advanced methods cannot handle
everything.
52
Hruda, L., Kolingerová, I. and Podgorelec, D.
Local Reflectional Symmetry Detection in Point Clouds Using a Simple PCA-Based Shape Descriptor.
DOI: 10.5220/0011622200003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 1: GRAPP, pages
52-63
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

Figure 1: Examples of scenes that exhibit one or more reflectional symmetries in their subparts - local symmetries (data
source: (Funk et al., 2017)).
Figure 2: Examples of weakly symmetrical objects with
plausible symmetry planes marked by the red line (source:
(Hruda et al., 2022)).
However, in this case the task is somewhat simpli-
fied by the fact that the whole object is anticipated to
be symmetric and the methods aim to find the plane
that best captures its symmetry. The problem be-
comes remarkably more difficult when the input ob-
ject or scene is not globally symmetric but merely
contains some noticeably symmetric area as its sub-
part. This is often referred to as local symmetry and
it is quite common in real 3D scans where the sym-
metric object is often surrounded by other geome-
try or sits on a larger flat surface that represents the
floor/ground (see Fig. 1 for specific examples). There
can also be multiple symmetric objects in the scene.
The methods that aim to solve this type of problem
are not as plentiful and those that exist often require
some form of pre-segmentation (Ecins et al., 2017),
use a local shape descriptor that requires a mesh on
the input (often a manifold one) (Mitra et al., 2006;
Shi et al., 2016) or seem to be very slow even for
scenes with a rather low point count (Lipman et al.,
2010).
In this paper we propose a very simple PCA-
based local shape descriptor and we present a new
method for finding local reflectional symmetries in
point clouds that uses this descriptor for point match-
ing. Our work builds on the previous work of (Mitra
et al., 2006), (Hruda et al., 2019) and (Hruda et al.,
2022).
2 METHOD DESCRPTION
Let X = {x
1
, x
2
, ..., x
n
}, x
i
∈ E
3
be a set of 3D points
(point cloud) that represents the input scene and let
r(P, x) be a transformation that represents an arbitrary
point x ∈ E
3
reflected over a given plane P. The goal
of our method is to extract local reflectional symme-
tries from X, i.e. a set of planes {P
1
, P
2
, ..., P
g
} where
each plane P
i
represents a reflectional symmetry de-
scribed by a transformation r(P
i
, x).
We represent a general plane P by its implicit
equation ax + by + cz + d = 0 with a, b, c, d being the
plane coefficients. We consider all planes to always
have unit normals, i.e. ||[a, b, c]
T
|| = 1. We further
denote r
vec
(P, v) a function that represents a general
vector v ∈ E
3
reflected over a given plane P where
v is a direction without position. The function r
vec
is computed in the same way as r only ignoring the
plane position, i.e. as if d = 0.
2.1 PCA-Based Shape Descriptor
Various symmetry detection methods use local shape
descriptors to find potentially symmetric pairs of
points throughout the input object/scene, e.g. (Mitra
et al., 2006; Shi et al., 2016; Sipiran et al., 2014). In
most cases, these descriptors are curvature/Laplacian-
based and are generally difficult to compute on point
clouds or even non-manifold meshes because robust
estimation of the principal curvatures or the Laplacian
mostly requires connectivity information and mani-
fold surface.
In contrast, we use a very simple local shape de-
scriptor based on the Principal Component Analysis
(PCA) (Wold et al., 1987) that can be computed on a
general set of points (i.e. requires neither connectivity
nor manifoldness) and we show that it can be used for
symmetric point matching as well. The descriptor is
computed as follows.
Let us take an arbitrary point x ∈ E
3
(not nec-
Local Reflectional Symmetry Detection in Point Clouds Using a Simple PCA-Based Shape Descriptor
53

essarily contained in X ) and select a radius r. The
set of points N
x
= {x
i
: x
i
∈ X, ||x
i
− x|| ≤ r} is de-
fined to be the neighborhood of the point x. By
computing the PCA for the points in N
x
we get the
three orthogonal eigenvectors v
x,1
, v
x,2
, v
x,3
, ||v
x,i
|| =
1, that correspond to the principle directions of N
x
,
and three eigenvalues λ
x,1
, λ
x,2
, λ
x,3
where each λ
x,i
corresponds to the variance of N
x
in the direction
of v
x,i
. The eigenvectors and eigenvalues are in-
dexed in such a way that |λ
x,1
| ≥ |λ
x,2
| ≥ |λ
x,3
| which
means that v
x,1
always represents the direction with
the largest variance. The PCA-based shape descrip-
tor for point x can then be simply described by
the eigenvectors v
x,1
, v
x,2
, v
x,3
and by a vector λ
λ
λ
x
=
[
|λ
x,1
|
λ
norm
,
|λ
x,2
|
λ
norm
,
|λ
x,3
|
λ
norm
]
T
where λ
norm
is a normalization
constant set so that it equals the variance of all points
lying on a line segment of length 2r which is the
maximum distance of any two points in any neigh-
borhood. This way λ
norm
simulates an eigenvalue for
points distributed uniformly across the entire neigh-
borhood in the direction of a corresponding eigenvec-
tor. The variance of a discrete set of k 1-dimensional
points x
1
, x
2
, ..., x
k
is
1
k
∑
k
i=1
(µ − x
i
)
2
where µ is the
mean of the points. For a continuous case of a line
segment of length 2r we can take the interval ⟨−r, r⟩
and compute its variance by integration. The mean of
the interval is zero so we get
λ
norm
=
1
2r
Z
r
−r
(0 − x)
2
dx =
1
r
Z
r
0
x
2
dx =
1
3
r
2
.
Given r is chosen relative to the input scene size,
the normalization makes λ
λ
λ
x
independent of the scene
scale.
The vector λ
λ
λ
x
holds information about the shape
of the neighborhood that is invariant under both rota-
tion and translation. This means that for two different
points x, y, if λ
λ
λ
x
and λ
λ
λ
y
are similar there is a good
chance that the points in the two neighborhoods N
x
,
N
y
represent similar shapes just differently positioned
and oriented which in turn implies that there could be
symmetry between them. The λ
λ
λ
x
vector values can
also be easily visualized as shown in Fig. 3 where
each point x of the scene is assigned a color whith
RGB values corresponding respectively to the coordi-
nates of λ
λ
λ
x
computed with r =
l
avrg
5
where l
avrg
is the
average distance of the points in the scene from the
scene’s centroid. It can be seen that the symmetric
counterparts of the couch in the middle are very sim-
ilarly colored, i.e. the λ
λ
λ vectors in them are similar.
However, the similarity of λ
λ
λ
x
and λ
λ
λ
y
does not im-
ply in any way that the potential symmetry between
N
x
and N
y
is reflectional. This information can be
derived from the eigenvectors v
x,i
and v
y,i
, i = 1, 2, 3.
Specifically, having a general plane P, if the neighbor-
Figure 3: A scene with a reflecionally symmetric couch in
the middle colored using the eigenvalues of the PCA de-
scriptor as RGB values (data source: (Funk et al., 2017)).
hood N
x
is reflectionally symmetric with the neigh-
borhood N
y
w.r.t. the plane P then each eigenvector
v
x,i
will be the same as or opposite to r
vec
(P, v
y,i
).
These properties of the PCA descriptor can be
used to find potentially symmetric pairs of points as
will be described in the following text. Note that the
descriptor can also be computed for points that are not
directly contained in the input point cloud X , this will
be shown useful later.
2.2 Descriptor Computation
To start matching potentially symmetric neighbour-
hoods using the PCA descriptor it first needs to be
computed but doing so for all points in the input scene
X could easily get computationally overwhelming as
real 3D scanned scenes often consist of hundreds of
thousands of points. Also, when computing the de-
scriptor for a given point, the points in the neighbour-
hood of the selected radius first need to be extracted
and doing so while avoiding brute-force computation
is more than desirable.
2.2.1 Simplification
Instead of computing the descriptor for all points of
the input scene X we create a simplified version of
the scene denoted X
′
= {x
′
1
, x
′
2
, ..., x
′
m
}, x
′
i
∈ E
3
. We
use the same grid-based point cloud simplification al-
gorithm as used in (Hruda et al., 2022) which stems
from putting the points of the point cloud into cells
of a uniform grid and averaging points in every cell.
Therefore, each cell provides a single point of the
new point cloud which is generally not contained in
the original point cloud. The process is repeated sev-
eral times with decreasing cell size until a target point
count is reached approximately. We use this algo-
rithm with target point count 10, 000 which is then
the rough number of points of X
′
.
GRAPP 2023 - 18th International Conference on Computer Graphics Theory and Applications
54

Since the PCA descriptor can be computed for
points outside of X but still represent its local features
we compute it at the m (roughly 10, 000) points of X
′
but for its computation at a given point x
′
∈ X
′
we
use the neighbourhood extracted from X in the cor-
responding region. This not only reduces computa-
tional cost but also ensures that the points used for
symmetric matching (see Section 2.4) are more uni-
formly distributed over the scene.
2.2.2 Neighbourhood Extraction
To efficiently extract points of X lying in a given
neighbourhood of radius r we again use a grid-based
approach from (Hruda et al., 2022). At the beginning
the points of X are stored in a uniform grid with cell
size r ×r ×r. Then, when a neighbourhood of a given
point x
′
needs to be extracted, we search for points
whose distance from x
′
is ≤ r only among points that
are in the same cell as x
′
and cells adjacent to this cell.
This is, of course, significantly faster than brute-force
iterating over all points of X, at least when r is rea-
sonably small. We use r =
l
avrg
5
as the default value
where the number 5 was chosen experimentally.
Other data structures, such as K-d tree, BSP tree
or octree, could be used as well. However, we believe
that the grid-based approach provides similar boost
in performance and is simpler to implement than the
tree-based structures.
2.3 Finding Planar Points
The PCA descriptor at points that lie in roughly pla-
nar neighbourhoods (floor, walls, etc.) does not re-
ally provide useful information in terms of symmetry.
First, because the first two eigenvectors have basically
random direction at planar points. Second, because
planar areas are usually quite plentiful in real world
scenes and could easily cause too many false positive
symmetric matches - this can be easily seen in Fig.
3 where the planar points are colored yellow. This
is why we first detect the points of X
′
that have ap-
proximately planar neighbourhoods so that we could
exclude them from the later steps.
For a given point x
′
∈ X
′
we decide whether it is
planar in the following way. We construct a plane that
passes through x
′
and whose normal vector is given
by v
x
′
,1
×v
x
′
,2
. We then compute the average distance
of points in N
x
′
from this plane and denote it ∆
⊥
x
′
-
this value will be the smaller the points in N
x
′
fit the
plane. We also project each point in N
x
′
orthogonally
on the same plane and compute the average distance
of these projected points from x
′
. We denote it ∆
∥
x
′
and it serves as a normalization value. Now the point
x
′
is marked as planar if
∆
⊥
x
′
∆
∥
x
′
< ε
∆
where ε
∆
= 0.1 and
its value was experimentally chosen.
2.4 Symmetric Point Matching
After the PCA descriptor has been computed in all
points of the simplified point cloud X
′
and planar
points were found we start searching for potentially
symmetric neighbourhoods. First, we find pairs of
non-planar points with similar λ
λ
λ vectors and then we
verify their potential reflectional symmetry using the
PCA eigenvectors.
2.4.1 λ
λ
λ Similarity Matching
For every non-planar point x
′
i
∈ X
′
, i = 1, ..., m we find
a non-planar point x
′
j
∈ X
′
, j = 1, ..., m, i ̸= j such
that ||λ
λ
λ
x
′
i
−λ
λ
λ
x
′
j
|| ≤ ε
λ
λ
λ
, where ε
λ
λ
λ
= 0.05, and we add
the pair (x
′
i
, x
′
j
) to a set Q of potentially symmetric
point pairs. If there are multiple points x
′
j
satisfying
these conditions we only use the one with the smallest
distance ||λ
λ
λ
x
′
i
−λ
λ
λ
x
′
j
||. To avoid brute-force computa-
tion we again use the grid-based approach described
in Section 2.2.2, only this time we store the λ
λ
λ vec-
tors in the grid with cell size ε
λ
λ
λ
× ε
λ
λ
λ
× ε
λ
λ
λ
, and use it
to efficiently find other vectors up to the distance ε
λ
λ
λ
from a given λ
λ
λ vector. The value of ε
λ
λ
λ
was chosen
experimentally.
In the end the set Q contains pairs (x
′
i
, x
′
j
) where
each such pair of points could potentially provide ev-
idence for symmetry.
2.4.2 Symmetry Verification
For each of the pairs acquired in the previous step we
need to check whether it truly presents evidence of
potential reflectional symmetry. This is done using
the eigenvectors of the PCA descriptor as suggested
in Section 2.1.
Since the first eigenvector bears the most relevant
information about the shape of the local neighbor-
hood (it corresponds to the largest eigenvalue), for
simplicity, we do not use the second and third eigen-
vectors for the symmetry verification, only the first
one. Therefore, we denote v
x
′
= v
x
′
,1
the relevant
eigenvector of the PCA descriptor computed at point
x
′
. However, both the second and third eigenvectors
could be included in the verification step but our ex-
periments do not suggest that it would cause a signif-
icant improvement.
For each one of the point pairs (x
′
i
, x
′
j
) ∈ Q we con-
struct a plane P such that r(P, x
′
i
) = x
′
j
and perform a
Local Reflectional Symmetry Detection in Point Clouds Using a Simple PCA-Based Shape Descriptor
55

Figure 4: A scene with the PCA-based descriptor symmetric matching - the symmetrically matched pairs of points of X
′
are
connected by the black lines, the coloring corresponds to the descriptor eigenvalues computed on X
′
, the grey color indicates
planar areas.
simple test. The pair of points is accepted as poten-
tially reflectionally symmetric if
min(||r
vec
(P, v
x
′
i
) − v
x
′
j
||, ||r
vec
(P, v
x
′
i
) + v
x
′
j
||) ≤ ε
v
where ε
v
= 0.1 and its value was chosen based on vast
experiments. When the pair of points passes the test
the plane P is added to a set C. As a result we ac-
quire a set C = {P
1
, P
2
, ..., P
h
} of candidate symmetry
planes.
Fig. 4 shows the symmetric matching for the
scene with the couch in the middle. The black lines
connect pairs of points of X
′
that were matched to-
gether and passed the verification step, i.e. their sym-
metry plane is in C. The coloring now reflects eigen-
values of the PCA descriptor computed for X
′
- the
color of a given point of X
′
was transferred to all
points of the input scene X that were in the same cell
of the simplification grid in the last iteration of the
simplification process (see Section 2.2.1). The grey
colored areas correspond to points that were marked
as planar (see Section 2.3). Among others, the figure
reveals numerous symmetric matches between the re-
flectionally symmetric counterparts of the couch indi-
cating that there are many planes in C that capture its
symmetry.
2.5 Mode Seeking
We follow the theory, used e.g. in (Mitra et al., 2006;
Shi et al., 2016; Hruda et al., 2019), that the sig-
nificant symmetries should now form modes in the
space of candidate transformations - planes in our
case. Finding the modes is often solved by clustering
(Mitra et al., 2006; Shi et al., 2016) but we believe
that clustering algorithms might become unnecessar-
ily complex and computationally expensive. Also, a
cluster of points might not necessarily correspond to
a local mode since a mode is represented by a sin-
gle point but a cluster is a set of points. Therefore,
with clustering, there would be some further actions
required regarding selecting a proper point from each
cluster to represent the mode.
Instead, we use the density peak location algo-
rithm proposed in (Hruda et al., 2019) modified to
serve our purpose. In general, the algorithm can be
described as follows. Let ρ(P
i
) be the density at a
given candidate P
i
∈ C. The density at a given point
in the space of planes corresponds to how many simi-
lar candidates there are to this point, i.e. the points
of high density should correspond to the modes in
the candidate space. The most significant mode, and
therefore the strongest symmetry candidate, would be
simply identified as argmax
P
i
∈C
ρ(P
i
).
2.5.1 Density Function
The density function is defined as
ρ(P
i
) =
∑
P
j
∈C
K(D(P
i
, P
j
))
where D(P
i
, P
j
) is a distance measure between P
i
and
P
j
and K(l) is a kernel which in (Hruda et al., 2019)
was originally set to the standard Gaussian function
but we instead use the modified Wendland’s function
from (Hruda et al., 2022). We denote it ϕ(x), it has a
very similar shape to the Gaussian function but is lo-
cally supported and smoothly goes to 0 at x = 2.6.
We set K(l) = ϕ(αl) where α is a spread parame-
ter and l represents distance. We experimentally set
α as α = 25. The local support property of the ker-
nel draws a direct boundary between candidates that
contributed to the density of P
i
and those that did not
which will be used later.
Denoting p
i
= [a
i
, b
i
, c
i
,
d
i
l
avrg
]
T
a representative co-
efficient vector of candidate plane P
i
, the distance
GRAPP 2023 - 18th International Conference on Computer Graphics Theory and Applications
56
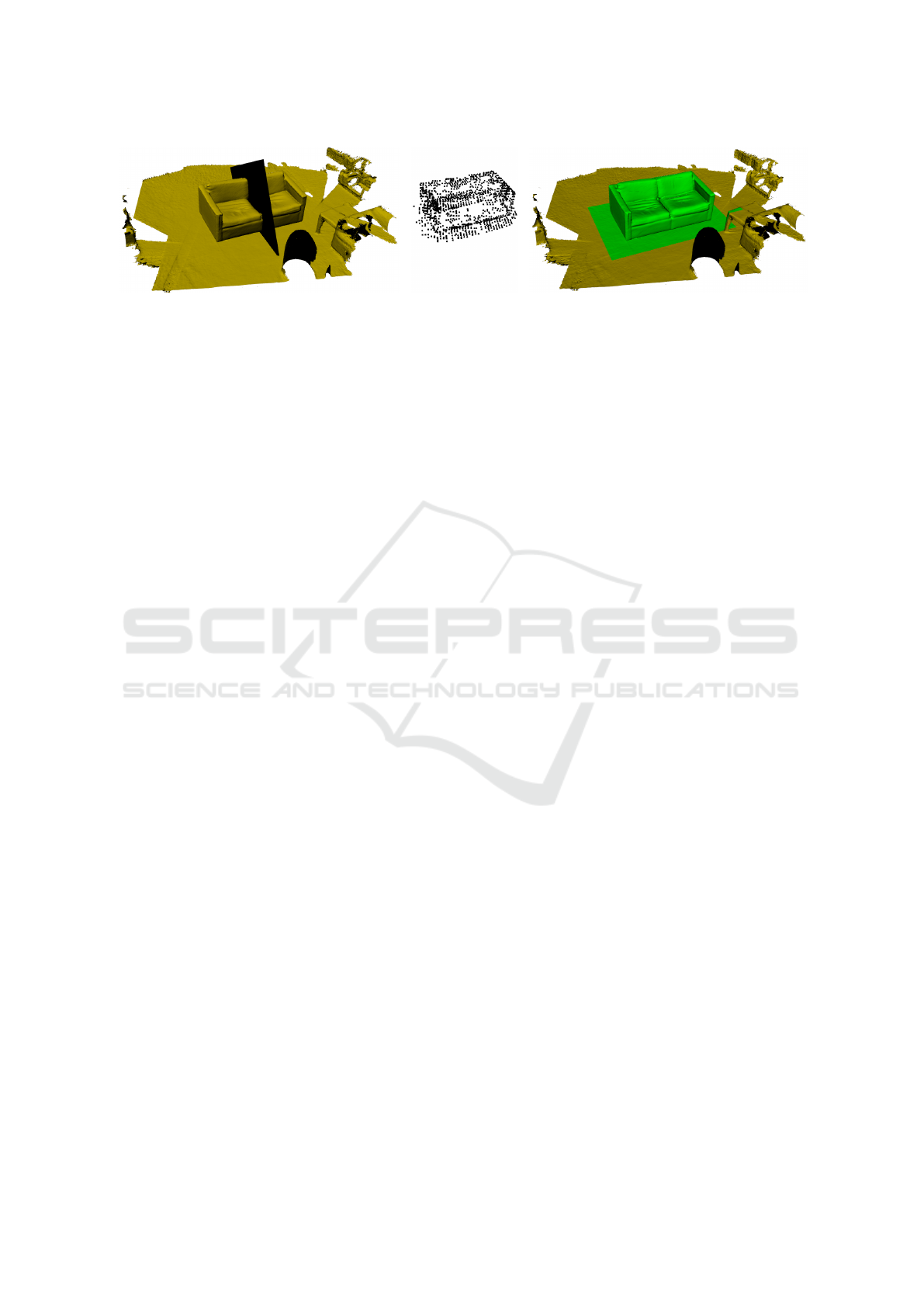
(a) P
i
(b) Initial Sym(P
i
) (c) Area(P
i
)
Figure 5: A plane P
i
(the black rectangle) detected by the density peak location algorithm - (a), the initial set Sym(P
i
) - (b),
the final symmetric subpart of X, Area(P
i
) (marked by the green color) - (c).
measure D is defined as
D(P
i
, P
j
) = min(||p
i
− p
j
||, ||p
i
+ p
j
|||) (1)
which, according to (Hruda et al., 2020), is usable for
this purpose but only when the input object is cen-
tered at the origin which is why, at the beginning, we
translate the input scene X such that its centroid lies
at the origin and at the end we translate the detected
symmetry planes back. The division of the d coeffi-
cient by l
avrg
ensures its normalization by the scene
size which, according to (Hruda et al., 2020), is also
required for the distance measure to be meaningful.
2.5.2 Density Peak Location
In (Hruda et al., 2019) the density peak location al-
gorithm was only used to find the most significant
mode in the transformation space and, due to usage
of a non-Euclidean distance metric, the Vantage Point
Tree (Yianilos, 1993) data structure was used for ef-
ficient computation of the density function. However,
we can have multiple symmetries in a single scene
which means we should be able to find multiple lo-
cal modes, not just the largest one. Since our distance
function D is Euclidean, when computing the density
for a candidate P
i
, we can use any standard data struc-
ture to quickly find only the candidates whose dis-
tance from P
i
is not larger than the radius of the sup-
port region of the kernel K. We again use a grid as
the auxiliary data structure, only this time in 4 dimen-
sions, as previously used in (Hruda et al., 2022) for
finding similar planes.
We first find the candidate P
i
∈ C that maximizes
the density function ρ(P
i
) and add it to a set S of pre-
liminary symmetries. Then, we remove from C all
candidates that had non-zero contribution to the den-
sity in P
i
, i.e. were inside the support region of the
kernel K at P
i
. We can now repeat this process to find
the second most significant mode etc. We can either
do this a certain predefined number of times or, as we
do, keep repeating the process as long as the density
at each newly located mode is above a given thresh-
old. We keep finding new modes and adding them to
S as long as their density value is at least half of the
density that the first located mode had. At the end the
set S ⊂ C contains the preliminary reflectional sym-
metries.
2.6 Finalizing Symmetries
The planes in the set S extracted in the previous step
might not be accurate and not all of them actually rep-
resent plausible symmetries. For each plane in S we
now need to extract the subpart of X which is actually
symmetric w.r.t. the plane and refine the symmetry for
the corresponding subpart. At last, we need to discard
symmetries that are too weak to be meaningful.
2.6.1 Extracting Symmetric Areas
For each of the planes in S we find the symmetric sub-
part of X in the following way. For a given plane
P
i
∈ S we take all the planes that contributed by a
non-zero value to its density in the density peak lo-
cation step in which it was added to S (see Section
2.5.2). For each of these contributing planes we take
the pair of points that initially created the plane (see
Sections 2.4.1 and 2.4.2) and add them to a set de-
noted Sym(P
i
) - a set of points of X
′
that contributed
to locating P
i
as a mode in the candidate space. The
points in Sym(P
i
) provide a rough information about
the position and size of the subpart of X that is sym-
metric w.r.t. P
i
. Fig. 5a shows an example of a plane
P
i
(the black rectangle) found by the density peak lo-
cation process and Fig. 5b shows the points in the
corresponding Sym(P
i
) set.
We compute the centroid of Sym(P
i
) and use PCA
to compute its principal axes - PCA eigenvectors v
x
,
v
y
, v
z
- and the variance in the direction of each of
these axes - eigenvalues λ
x
, λ
y
, λ
z
. We express each
point x
j
∈ Sym(P
i
) as a point in the local coordinate
system with the origin at the centroid of Sym(P
i
) and
basis directions of v
x
, v
y
, v
z
. This local expression
of point x
j
is denoted
ˆ
x
j
= [ˆx
j
, ˆy
j
, ˆz
j
]
T
. We consider
a point
ˆ
x
j
an outlier if the absolute value of one of
Local Reflectional Symmetry Detection in Point Clouds Using a Simple PCA-Based Shape Descriptor
57

its coordinates is larger than double of the standard
deviation of the points of Sym(P
i
) (its square is larger
than quadruple of the variance) in the corresponding
direction, i.e. we only keep points x
j
for which the
expression
ˆx
2
j
≤ 4λ
x
and ˆy
2
j
≤ 4λ
y
and ˆz
2
j
≤ 4λ
z
(2)
is true and remove all other points from Sym(P
i
). We
repeat this process one more time (compute centroid
and PCA of the new Sym(P
i
) and remove outliers) and
then we create a point set Area(P
i
) ⊂ X that contains
all points from the input point cloud X that satisfy the
expression in Eq. (2) only this time with x
j
∈ X and
the centroid, principal axes and variances being com-
puted for the final Sym(P
i
) point set. The set Area(P
i
)
is now considered the subpart of X that is symmetric
w.r.t. the preliminary symmetry plane P
i
∈ S. Fig. 5c
depicts the extracted Area(P
i
) (colored green) for the
P
i
plane from Fig. 5a.
2.6.2 Symmetry Refinement
We now refine the preliminary symmetries with re-
spect to their corresponding subparts of the input
point cloud X. For each plane P
i
∈ S we use the op-
timization step for global reflectional symmetry from
the method of (Hruda et al., 2022) where P
i
is the ini-
tial plane and Area(P
i
) is the expected globally sym-
metric object. This method uses a differentiable sym-
metry measure that represents the symmetry of the in-
put object w.r.t. the given plane and a gradient-based
optimization to find its local maximum. We also in-
clude the simplification process described in Section
3.3 in (Hruda et al., 2022) where the input object is
simplified to roughly 1000 points before the optimiza-
tion is started.
We replace each plane P
i
∈ S by a plane that was
converged to by the optimization started from P
i
on
Area(P
i
). As a result the accuracy of the symmetry
planes in S should increase.
2.6.3 Excluding Bad Symmetries
The density peak location in the space of candidate
planes created by the PCA-based descriptor point
pairing can produce false positives and even the re-
finement from the previous step does not guarantee
that all the planes in S are meaningful.
We use the symmetry measure from the refine-
ment step to determine the plausibility of a given
plane. The symmetry measure is computed by trans-
forming each point of the object by the given trans-
form (in our case reflection over a plane) and comput-
ing similarity (in terms of distance) of the transformed
point to all points of the object. All the similarities
are summed together to provide the measure value
(for more details we refer to (Hruda et al., 2022)).
The problem is that this value is not normalized in
any way and does not only depend on the strength of
the symmetry but also on various properties of the in-
put object. Therefore, we use a modified version of
the symmetry measure where we divide its value by
a symmetry measure value that would be achieved by
perfect symmetry. We simulate the perfect symme-
try measure by computing the symmetry measure of
the identity transform. We call this modified version
Relative Symmetry Measure (RSM).
For each plane P
i
∈ S we now compute the RSM
of the reflection over P
i
transform on Area(P
i
). All
planes with RMS greater than 0.4 are accepted as the
resulting symmetry planes of the input scene X.
3 RESULTS
Our method was implemented in C# and the results
were acquired on a computer with CPU Intel® Core
i7-10700F (frequency: 2.9GHz, turbo boost: 4.8GHz,
8 cores, L1 cache: 512kB, L2 cache: 2MB, L3 cache:
16MB) and 32GB memory (frequency: 3.2GHz) run-
ning a Windows 10 operating system.
We tested the method on several real 3D scenes
from the dataset (Funk et al., 2017). The results can
be seen in Fig. 6, the black rectangles indicate the
detected planes. We note that although the objects in
the figure are represented by triangle meshes, we only
used the vertices as the input point cloud X for our
method. Triangle meshes are much easier to visualize
and most likely the objects were originally scanned
as point clouds and meshing was done in post pro-
cessing which means that the vertices we use actually
represent the original raw point clouds. It seems that
the strongest symmetries are detected correctly in all
of these 12 scenes but is should be noted that some
of the scenes also contain some weaker symmetries
that were not identified by our method, this is espe-
cially noticeable in Scene 12. On the other hand, the
method sometimes finds symmetries that are techni-
cally correct but would not be expected by a human
observer. An example of this case is Scene 7 where
two symmetries were found on the long edge of the
couch seat on the right side. Such symmetries are not
meaningful for a person but it is understandable that
the method detects them since there are many points
symmetric w.r.t. both these planes. In Scene 9 our
method also identified a plausible symmetry plane of
the partial chair/couch in the top right corner. Some-
times, mostly when there are multiple objects in dif-
ferent places that are symmetric w.r.t. the same plane,
GRAPP 2023 - 18th International Conference on Computer Graphics Theory and Applications
58
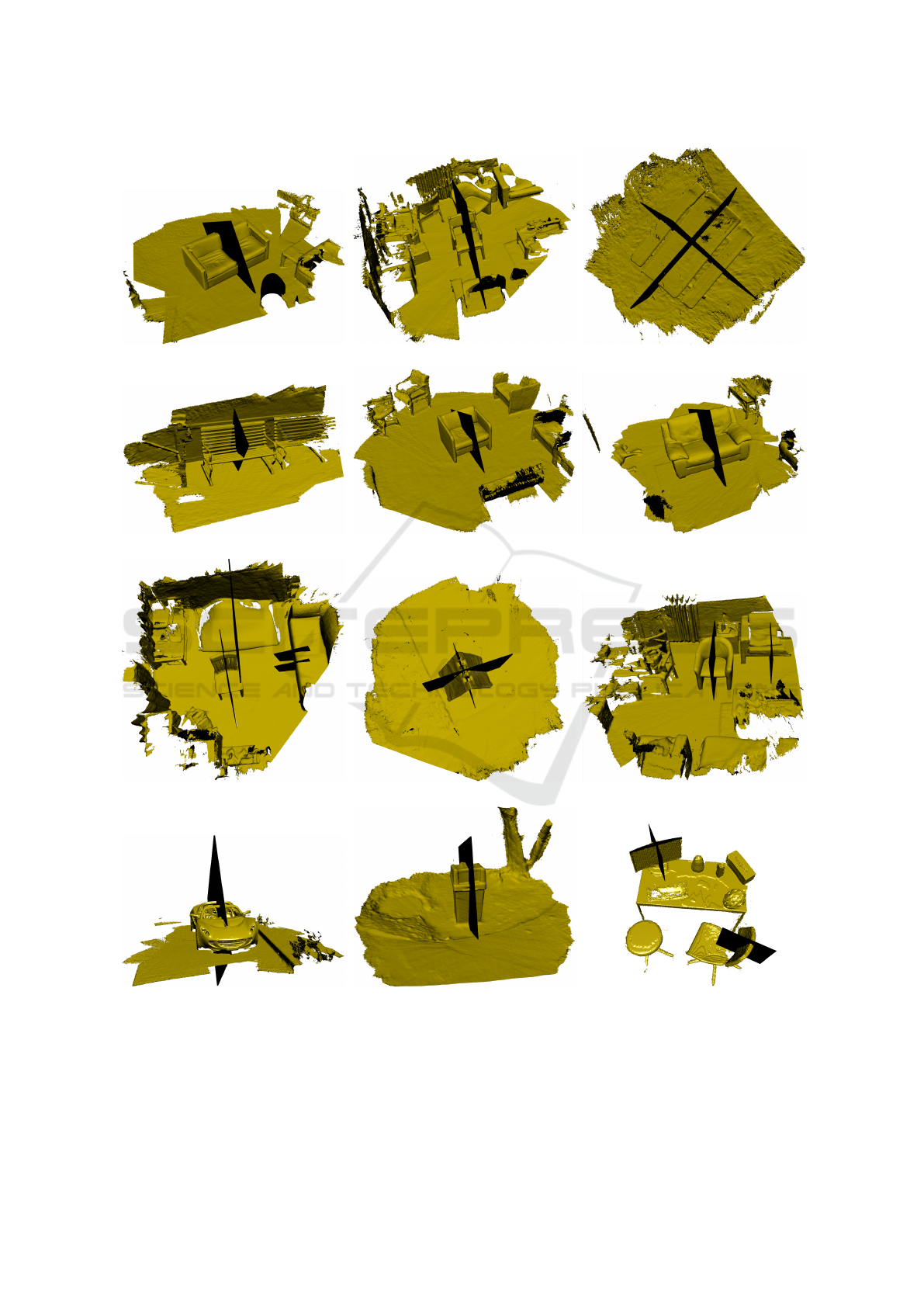
(a) Scene 1 (b) Scene 2 (c) Scene 3
(d) Scene 4 (e) Scene 5 (f) Scene 6
(g) Scene 7 (h) Scene 8 (i) Scene 9
(j) Scene 10 (k) Scene 11 (l) Scene 12
Figure 6: The results of our method on several 3D scanned scenes from the (Funk et al., 2017) dataset, the detected symmetry
planes are marked by the black rectangles.
the method covers a larger area with a single sym-
metry. This can be seen in Scene 2 where we have
a single symmetry plane for the chair in the middle
and the partial chair in front of it because both these
objects were included in a single symmetric area.
For demonstration of the quality of the detected
Local Reflectional Symmetry Detection in Point Clouds Using a Simple PCA-Based Shape Descriptor
59
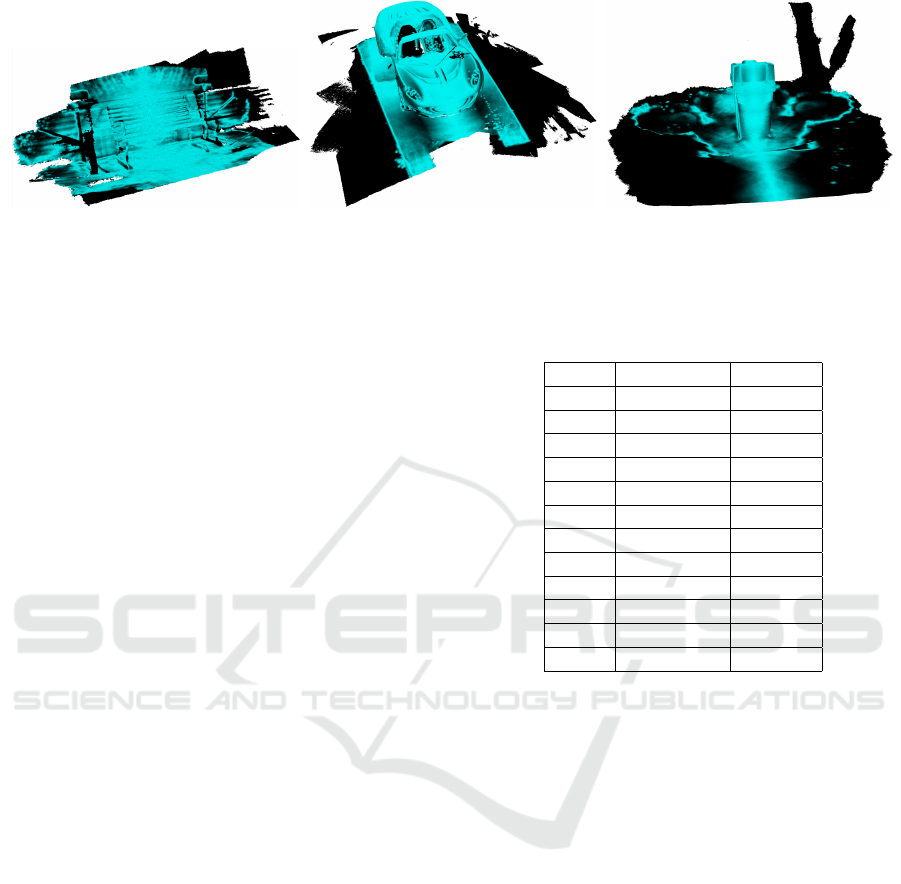
(a) Scene 4 (b) Scene 10 (c) Scene 11
Figure 7: Symmetry coloring from (Hruda et al., 2022) for the one detected plane in three different scenes - the lighter the
color the stronger the symmetry of the given point.
symmetries we used the symmetry coloring proposed
in (Hruda et al., 2022) to show how strong a given
symmetry is for different points of the scene. We used
this for scenes 4, 10 and 11 where we always took the
one detected plane (see Fig. 6) and we colored all
the points in the input scene in correspondence to the
symmetry of this plane. The coloring is depicted in
Fig. 7. The lighter the color the stronger the symme-
try of the given point. The symmetry mostly covers
the object for which it was detected but, of course,
partially also includes some other regions of the scene
such as the ground.
Tab. 1 shows the number of points and computa-
tion time of our method for each scene. Although the
point counts of the scenes are quite large (hundreds of
thousands) the computation time ranges around 20s,
and sometimes gets under 10s, which can be consid-
ered rather fast. The exception is Scene 10 which has
almost 2 million points. We use a single-threaded im-
plementation of the method but its most time consum-
ing stages (descriptor computation and point pairing)
could be easily parallelized which would make the
overall method potentially several times faster.
Our method should work on point clouds with
even larger point counts (tens of millions / billions)
but the computational cost would probably become
overwhelming.
3.1 Noisy Data
In order to test robustness to noise of our method and
the PCA-based descriptor we selected two scenes and
added a vector [rand
x
, rand
y
, rand
z
]
T
· l
avrg
· mag to
each of their points where rand
x
, rand
y
, rand
z
are uni-
form random values from −1 to 1 and mag is the noise
magnitude. Fig. 9 shows the detected planes for the
two scenes with added noise with mag = 0.025 and
mag = 0.05. We colored the objects in the same way
as in Fig. 4 to show what effect the noise has on the
λ
λ
λ vectors of the PCA descriptor. The detected sym-
metry planes are very similar to those detected on the
Table 1: The computation time of our method in seconds
for each one of the scenes from Fig. 6.
Scene Point count Time [s]
1 387540 12.3
2 598324 18
3 439089 12.5
4 287875 8.6
5 515496 18.7
6 380592 10.5
7 559905 24.4
8 321052 10.6
9 566153 16.1
10 1891185 133.7
11 288759 9.3
12 233600 7.7
noiseless versions of the scenes and the λ
λ
λ vectors of
the descriptor seem to still well represent similarities
of the local neighborhoods that could be symmetric.
The planar area detection step seems to start fail-
ing under the influence of the noise but it apparently
does not impact the symmetry detection results very
much. This might partially be because the noise also
makes the PCA eigenvectors a little more random in
the planar regions which probably also lowers the po-
tential for false positive matches.
Note that, although the first step of our method
is simplification which partially suppresses the noise,
the simplified point set is only used for point pair-
ing but the PCA-based descriptor is computed for the
points of the original point set and is therefore fully
affected by the noise.
Fig. 8 shows how the noise changes the detected
plane for different scenes. For this experiment we
only used scenes where the method finds exactly one
symmetry plane. For each scene we kept increas-
ing the noise magnitude and for each magnitude level
we used the density peak location algorithm to find
the single most pronounced plane in the candidate
space regardless of its RSM value. We then used
the plane distance function from Eq. (1) to measure
GRAPP 2023 - 18th International Conference on Computer Graphics Theory and Applications
60
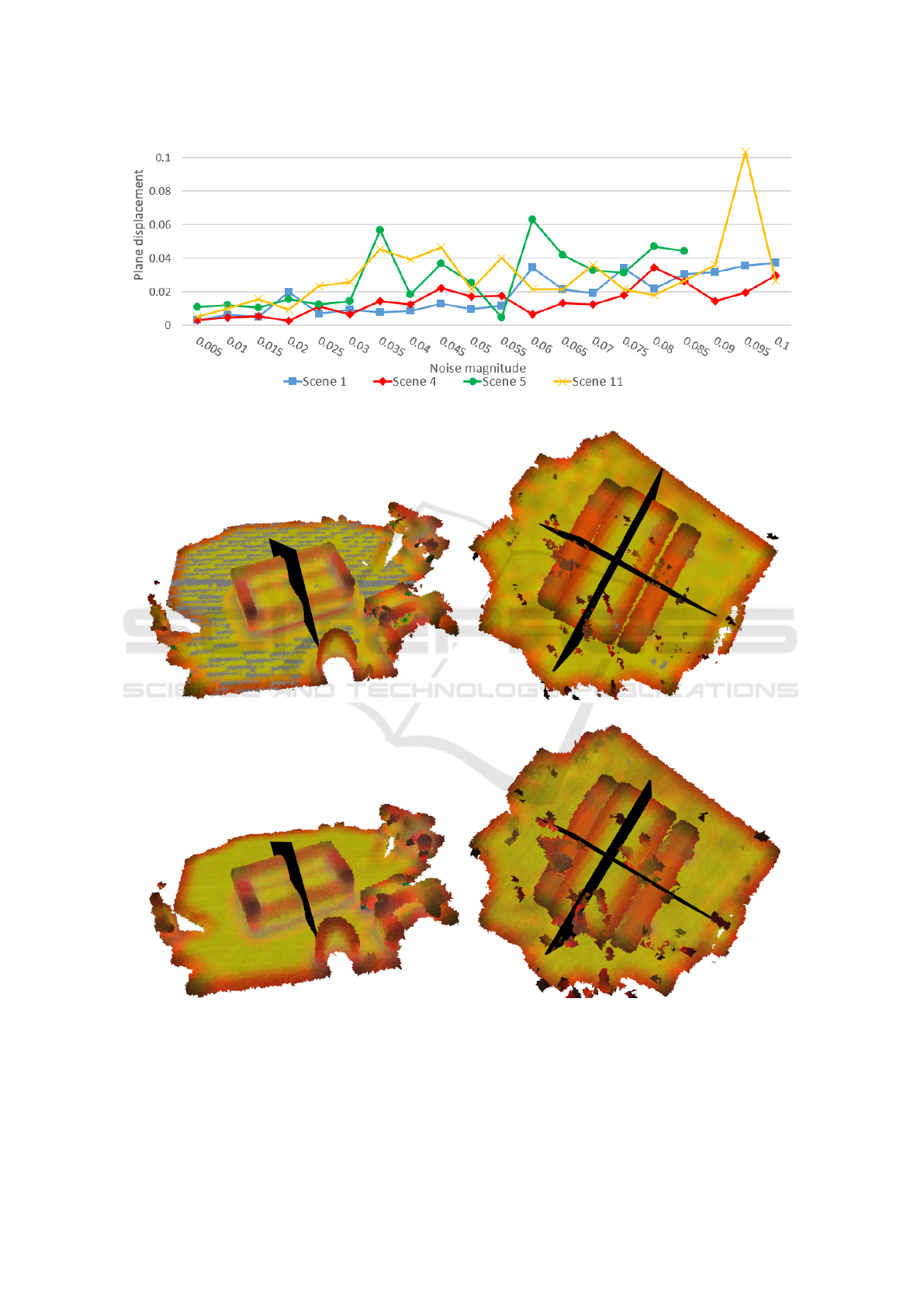
Figure 8: Displacement of the symmetry plane detected on different scenes with different magnitude of added noise from the
plane detected on the noise free version of the scene expressed in terms of the distance function from Eq. (1).
(a) Scene 1, mag = 0.025 (b) Scene 3, mag = 0.025
(c) Scene 1, mag = 0.05 (d) Scene 3, mag = 0.05
Figure 9: Results of our method for two different scenes with added noise with mag = 0.025 and 0.05, the colors indicate
eigenvalues of the PCA descriptor, grey corresponds to detected planar areas.
the displacement of the detected plane from the plane
that was found on the original noise free scene. For
Scenes 1 and 4 there seems to be roughly linear de-
pendency between the noise magnitude and the plane
Local Reflectional Symmetry Detection in Point Clouds Using a Simple PCA-Based Shape Descriptor
61
(a) Fail 1 (b) Fail 2
Figure 10: Examples of two input scenes where the method fails to detect plausible symmetry planes.
displacement which increases rather slowly showing
that the noise does not influence the function of the
PCA descriptor and the density peak location step
significantly. In Scenes 5 and 11 the displacement
appears to be much more random and oscillates a
lot. For Scene 5 we do not include the displacement
for mag > 0.085 because for larger magnitudes the
method stops detecting the corresponding plane com-
pletely and the displacement increases by an order of
magnitude which would make the graph unreadable.
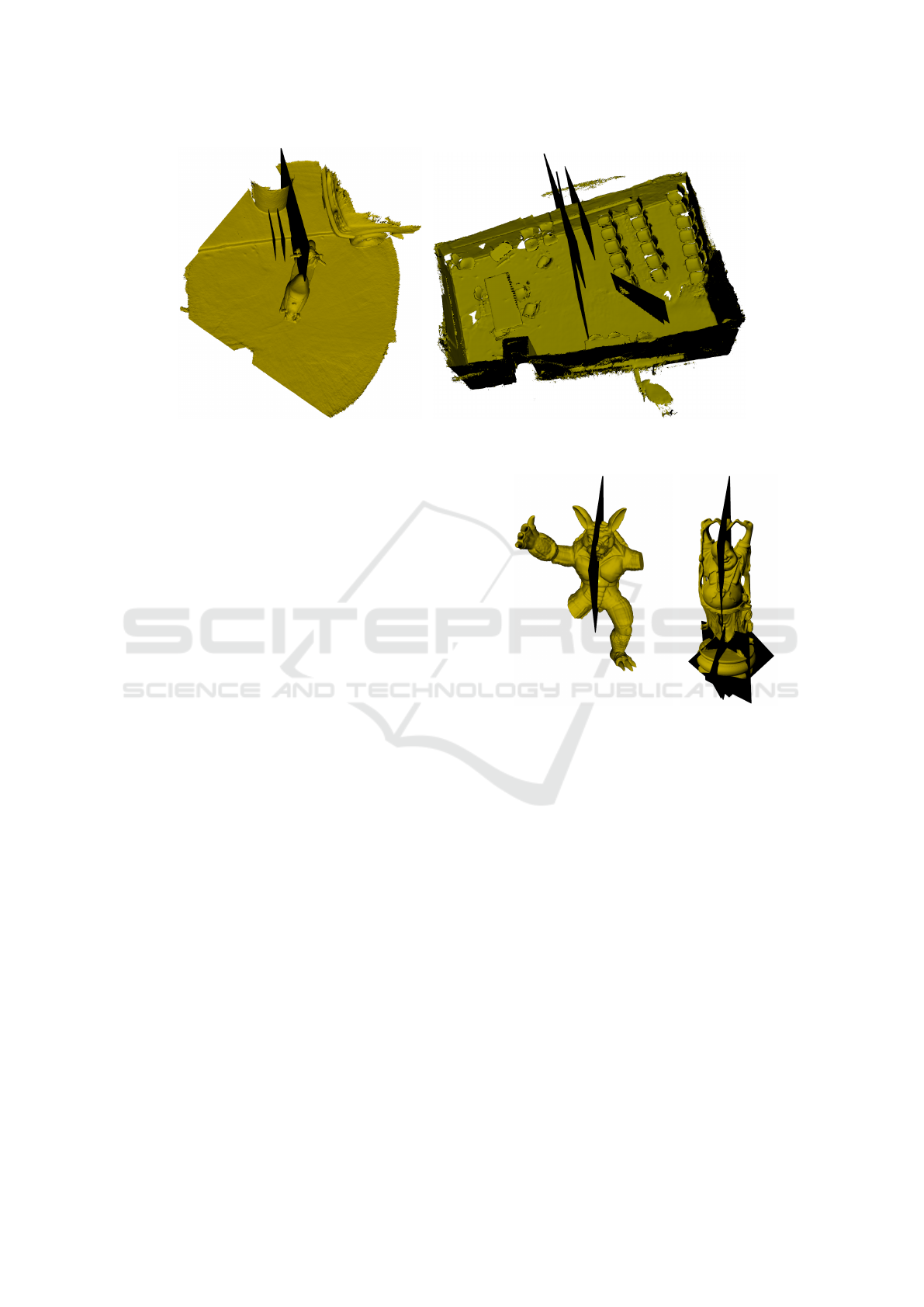
3.2 Globally Symmetric Objects
Since a method designed to detect local symmetries
should also somewhat work for detecting global sym-
metries, in Fig. 11 we show the results of our method
for two selected globally symmetric objects. The
method correctly identified the symmetry of the Ar-
madillo despite its missing parts. For the Buddha ob-
ject the method detected its overall global symmetry
and also several local symmetries of the pedestal.
4 LIMITATIONS
Our method also has some weaknesses and limitations
some of which were already indicated in the previous
section. The method can be easily confused by sit-
uations where long edges appear in the scene. This
was already shown in Fig. 6, Scene 7 but a more ex-
plicit example of this problem can be seen in Fig. 10a
where, instead of finding the dominant symmetry of
the scooter in the middle, the method finds multiple
visually insignificant symmetries along the long edge
in the upper part of the scene.
(a) Partial Armadillo (b) Buddha
Figure 11: Results of our method for two selected globally
symmetric objects.
Our method also has problems with detecting
symmetries on objects that are very small in compari-
son to the overall size of the input scene. An example
is shown in Fig. 10b where the method finds several
nonsensical symmetries instead of finding symmetries
of the chairs because the chairs are too small. This is-
sue might be fixable by different parameter settings
but we were unable to find a setting that would work
for this particular scene.
5 CONCLUSION
We proposed a very simple PCA-based local shape
descriptor and we have shown how it can be used
for reflectional symmetric point matching in 3D point
clouds. We presented a new method for finding lo-
cal reflectional symmetries that is based on this idea
GRAPP 2023 - 18th International Conference on Computer Graphics Theory and Applications
62

in combination with the density peak location algo-
rithm and we have shown its results on several real
3D scanned scenes. We demonstrated the robustness
to noise of both the PCA descriptor and the overall
method as well as its computational efficiency. The
limitations of the method described in the previous
section are to be addressed in the future.
ACKNOWLEDGEMENTS
This work was supported by the Czech Science Foun-
dation, project GACR 21-08009K Generalized Sym-
metries and Equivalences of Geometric Data. Luk
´
a
ˇ
s
Hruda was also funded by Ministry of Education,
Youth and Sports of the Czech Republic – the stu-
dent research project SGS-2022-015 New Methods
for Medical, Spatial and Communication Data.
REFERENCES
Comb
`
es, B., Hennessy, R., Waddington, J., Roberts, N., and
Prima, S. (2008). Automatic symmetry plane estima-
tion of bilateral objects in point clouds. In 2008 IEEE
Conference on Computer Vision and Pattern Recogni-
tion, pages 1–8. IEEE.
Ecins, A., Fermuller, C., and Aloimonos, Y. (2017). Detect-
ing reflectional symmetries in 3d data through sym-
metrical fitting. In Proceedings of the IEEE Inter-
national Conference on Computer Vision Workshops,
pages 1779–1783.
Funk, C., Lee, S., Oswald, M. R., Tsogkas, S., Shen, W.,
Cohen, A., Dickinson, S., and Liu, Y. (2017). 2017
iccv challenge: Detecting symmetry in the wild. In
Proceedings of the IEEE International Conference on
Computer Vision, pages 1692–1701.
Hruda, L., Dvo
ˇ
r
´
ak, J., and V
´
a
ˇ
sa, L. (2019). On evaluating
consensus in ransac surface registration. In Computer
Graphics Forum, volume 38, pages 175–186. Wiley
Online Library.
Hruda, L., Kolingerov
´
a, I., and L
´
avi
ˇ
cka, M. (2020). Plane
space representation in context of mode-based sym-
metry plane detection. In International Conference
on Computational Science, pages 509–523. Springer.
Hruda, L., Kolingerov
´
a, I., and V
´
a
ˇ
sa, L. (2022). Robust,
fast and flexible symmetry plane detection based on
differentiable symmetry measure. The Visual Com-
puter, 38(2):555–571.
Li, B., Johan, H., Ye, Y., and Lu, Y. (2016). Efficient 3d re-
flection symmetry detection: A view-based approach.
Graphical Models, 83:2–14.
Lipman, Y., Chen, X., Daubechies, I., and Funkhouser, T.
(2010). Symmetry factored embedding and distance.
In ACM SIGGRAPH 2010 papers, pages 1–12.
Martinet, A., Soler, C., Holzschuch, N., and Sillion,
F. X. (2006). Accurate detection of symmetries in
3d shapes. ACM Transactions on Graphics (TOG),
25(2):439–464.
Mitra, N. J., Guibas, L. J., and Pauly, M. (2006). Partial
and approximate symmetry detection for 3d geometry.
ACM Transactions on Graphics (TOG), 25(3):560–
568.
Nagar, R. and Raman, S. (2020). 3dsymm: robust and accu-
rate 3d reflection symmetry detection. Pattern Recog-
nition, 107:107483.
Shi, Z., Alliez, P., Desbrun, M., Bao, H., and Huang, J.
(2016). Symmetry and orbit detection via lie-algebra
voting. In Computer Graphics Forum, volume 35,
pages 217–227. Wiley Online Library.
Sipiran, I., Gregor, R., and Schreck, T. (2014). Approximate
symmetry detection in partial 3d meshes. In Computer
Graphics Forum, volume 33, pages 131–140. Wiley
Online Library.
Wold, S., Esbensen, K., and Geladi, P. (1987). Principal
component analysis. Chemometrics and intelligent
laboratory systems, 2(1-3):37–52.
Yianilos, P. N. (1993). Data structures and algorithms for
nearest neighbor. In Proceedings of the fourth annual
ACM-SIAM Symposium on Discrete algorithms, vol-
ume 66, page 311. SIAM.
ˇ
Zalik, B., Strnad, D., Kohek,
ˇ
S., Kolingerov
´
a, I., Nerat, A.,
Luka
ˇ
c, N., and Podgorelec, D. (2022). A hierarchical
universal algorithm for geometric objects’ reflection
symmetry detection. Symmetry, 14(5):1060.
Local Reflectional Symmetry Detection in Point Clouds Using a Simple PCA-Based Shape Descriptor
63
