
Random Quasi Intersections with Applications to Instant
Machine Learning
Alexei Mikhailov and Mikhail Karavay
Institute of Control Problems, Russian Acad. of Sciences, Profsoyuznaya Street, 65, Moscow, Russia
Keywords: Machine Learning, Inverse Sets, Inverse Patterns, Pattern Indexing, Quasi Intersections.
Abstract: Random quasi intersections method was introduced. The number of such intersections grows exponentially
with the increasing amount of pattern features, so that a non-polynomial problem in some machine learning
applications emerges. However, the paper experimentally shows that randomness allows finding solutions to
some visual machine learning tasks using a random quasi intersection-based fast procedure delivering 100%
accuracy. Also, the paper discusses implementation of instant learning, which is, unlike deep learning, a non-
iterative procedure. The inspiration comes from search methods and neuroscience. After decades of
computing only one method was found able to deal efficiently with big data, - this is indexing, which is at the
heart of both Google-search and large-scale DNA processing. On the other hand, it is known from
neuroscience that the brain memorizes combinations of sensory inputs and interprets them as patterns. The
paper discusses how to best index the combinations of pattern features, so that both encoding and decoding
of patterns is robust and efficient.
1 INTRODUCTION
Most machine learning methods make use of iterative
training, gradient descend and many adaptive
coefficients resulting in slow learning. At the same
time, human brain can often memorize new visual
patterns at first glance. This paper investigates how to
build non-iterative, instant learning by partly
borrowing ideas from text search engines (Brin and
Page, 1998). For some previous work on numerical
data indexing please refer to (Sivic and Zisserman,
2009, Mikhailov et al., 2017, Mikhailov and
Karavay, 2021). However, the novelty of the
approach discussed in this paper comes from the
suggested method of random quasi intersections,
which makes indexing of noisy, numerical patterns a
possibility. Random quasi intersections (hereinafter
referred to as quasi intersections) emerge as a result
of random pairing of close elements of two sets that
are defined in a metric space. Depending on
applications, quasi intersections can aid machine
learning leading up to 100% accurate classification.
Besides, quasi intersections allow for pattern
inversion that drastically cuts down the
computational complexity leading to instant non-
iterative learning. Similar to deep learning, quasi
intersections can work on raw features for some
computer vision application. Whereas the classical
intersection size of sets
, XYis defined as the
number of pairs of identical elements
|| |{ (, ): }|
X
YxXyYxy=∈∈=
the quasi intersection size is defined as the number of
pairs of close elements
|| |{ (, ): | - | }
e
X
YxXyYxye=∈∈ ≤ (1)
The definition (1) simultaneously produces many
potential quasi intersections of different sizes
between sets
, XY
since many combinations of
mating pairs are possible.
Example 1. Let
{1, 2}, {2, 3}, 1
X
Ye===
.
Here, there exist two quasi intersections:
- single pair (2, 2) quasi intersection is all there is
since the pair (1, 3) does not qualify: |1 - 3| > 1;
- two pair quasi intersection is also possible since both
pairs (1, 2), (2, 3) do qualify.
The specific intersection size emerges only after a
specific pairing of elements of two sets is completed,
that is, one combination of pairs is created. Here, the
222
Mikhailov, A. and Karavay, M.
Random Quasi Intersections with Applications to Instant Machine Learning.
DOI: 10.5220/0011622000003411
In Proceedings of the 12th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2023), pages 222-228
ISBN: 978-989-758-626-2; ISSN: 2184-4313
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

exclusion rule applies, which states that each element
in one set cannot pair simultaneously with more than
one element from the other set.
Another reason for introduction of the non-
standard definition (1) is as follows. In machine
learning applications, when patterns are classified in
accordance with their similarities, the intersection
sizes must be stable. The term
e
specifies acceptable
variability of sets’ elements. With classical
intersections, even though the identity
|{ } { }| |{ }|
x
xx= is true, a small noise
e
can
render the classical intersection empty:
|{ } { }| 0xxe+= . But, the quasi intersection
{} { }
e
x
xe+ can restore the original intersection
size
|{ } { }| |{ }|
e
x
xe x+= if elements are
properly paired. Then, for instance, the Jaccard
similarity
(,)| |/| |
J
XY XY XY= (Jaccard, 1901)
can be used for classification purposes.
Example 2. For intuitively similar sets
{100,150,200}X =
and
{199, 151, 101}Y =
,
classical intersection size is equal to 0. However the
non-standard definition (1) restores the intersection
size to
|| 3 at 1
e
X
Ye== .
The main results of the paper are provided in
Section 2. The Section 3 describes basics of
applications of quasi intersections to machine
learning, which is illustrated by two examples.
Section 3.3 presents an introductory example of
classification of visual patterns and Section 3.4
considers using quasi intersections for 1100
commercial trademarks image classification. Finally,
the Appendix Section discusses the basics of pattern
inversion techniques that are employed together with
the quasi intersections method.
2 RESULTS
a) A novel definition of the quasi intersection was
introduced, which is a specific pairing of close
elements.
b) At an arbitrarily large
e
, the number of quasi
intersections grows exponentially as
!n
c) Two pattern recognition experiments of quasi
intersection-based machine learning show 100%
accuracy achieved at testing (ref. to Section 3.3, Table
1, and Section 3.4, Table 2).
3 QUASI INTERSECTIONS IN
MACHINE LEARNING
With the objective of pattern recognition by
classification that is based on set similarities, it might
seem reasonable to look for maximum or minimum
quasi intersection sizes as a measure of set similarity.
However, such approach is not feasible. Indeed, for
two sets with
N
elements each, there exist
!N
ways
of pairing the sets’ element. This number can easily
grow bigger than the number of atoms in the
Universe. But, importantly, experiments show that
as the feature set size goes beyond some
50 – 100 features, the quasi intersection-based
classification accuracy may approach 100
%. It is a
consequence of experimental results showing that the
pairing of elements subject to condition
||
x
ye−≤
can often be chosen randomly.
3.1 Classification of Feature Sets
Let
{}
X
x=
be a set and { } , 1,...,
nn
X
xn N==, be a
collection of sets, where
n
-th set represents the
n
-th
pattern class. Also, let the following non-standard
intersection Jaccard measure
(, )| |(| || |- | |)
en en n en
J
XX XX X XXX=+
(2)
be used to evaluate the similarity between patterns
,
n
X
X . Note that 0(,)1
en
JXX≤≤. Then the
unknown pattern
X
is assigned to the class
n
, such
that
1,...,
( , ) max ( , ), if ( , )
en ei en
iN
J
XX J XX J XX t
=
=≥
where
t
is a threshold at training. Otherwise, a new
class name 1NN=+ is incrementally created and
the unknown pattern
X
, which is now indexed as
N
X
, becomes its representative. Note that the above
procedure amounts to an unsupervised learning.
3.2 Intersections vs. Frequencies
Direct matching of an input pattern
X
to all patterns
, 1,...,
n
X
nN= , is computationally expensive.
Fortunately, pattern indexing by pattern inversion
provides way of calculating occurrence frequencies
, 1,...,
n
f
nN= , of pattern classes in inverse data,
e.g., inverse files, inverse patterns, inverse sets, etc.
A strict formal definition of inverse data structures is
provided in Appendix Section. The following identity
| | , 1,...,
en n
X
Xfn N== (3)
Random Quasi Intersections with Applications to Instant Machine Learning
223
makes possible the replacement of quasi intersection
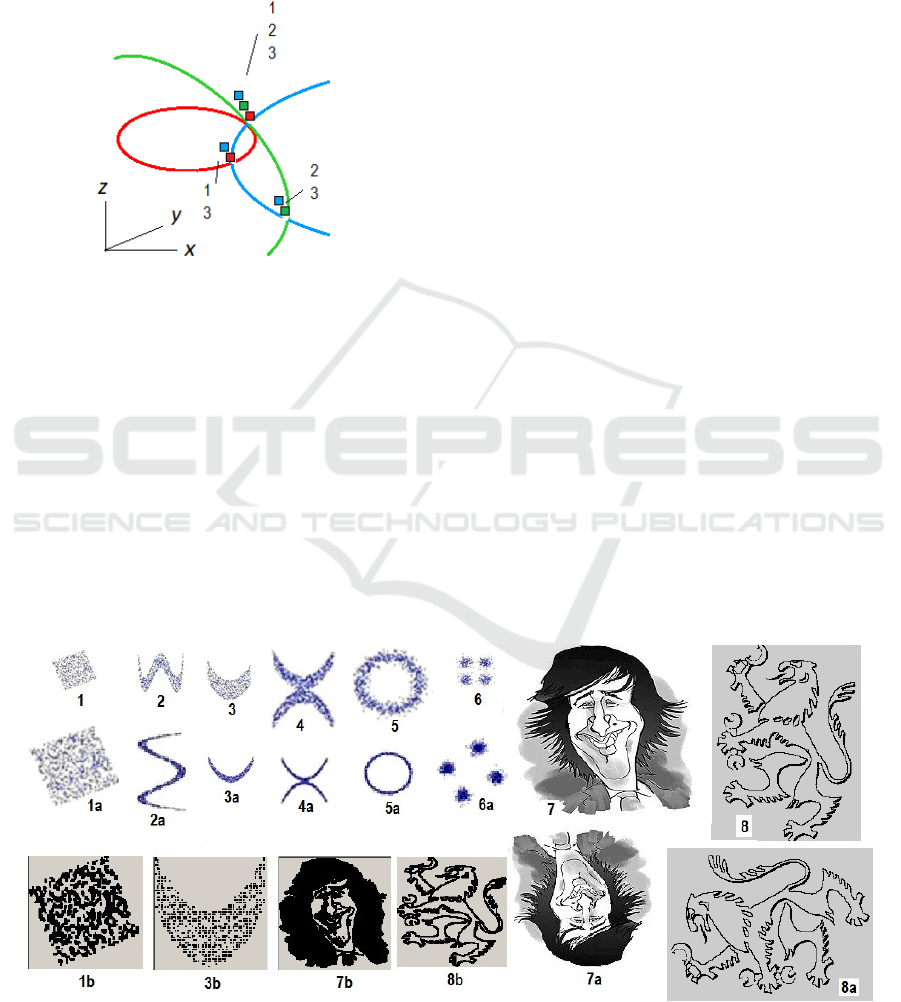
sizes for frequency. The identity is illustrated by the
example provided in Figure 1 that shows red (R),
green (G) and blue (B) curves intersecting at 3 points,
where columns emerge that contain names of these
curves. Obviously, the intersection size of G, B and
G, R patterns is
|| 2GB= and || 1GR= .
Figure 1: Red (1), green (2) and blue (3) intersecting curves
on (
,
x
y
)- coordinate plane.
At the same time, a histogram h of names
contained in the columns {2, 3} and {1, 2, 3], where
the green curve intersects the other lines, has the
samples
() 2hB =
and
() 1hR =
.
Hence,
|| ()GB hB= and || ()GR hR= ,
as it is stated in (3). Importantly, when columns
are available, all intersection sizes can be obtained by
scanning only three columns (in this example), even
though curves may be represented by thousands of
dots. Note that the above approach is similar to TF-
IDF method (Jones, 2004) developed for document
search or information retrieval, where inverse
document frequencies of the word across a set of
documents are calculated. This is a typical method
employed in search engines, where document name
frequencies in fully inverted files are calculated.
However, search engines will not work for pattern
recognition applications where textual inputs are
replaced with noisy numerical data. That is, not just
inverse document frequency of the word may change
depending on the currently available document
collection, but the word itself may completely
disappear because of even a small noise.
In case of numeric patterns, the objective is to
index each pattern by its features, for instance, the
edge pattern on the plain – by
(, )
x
y
- coordinates of
its dots. Then pattern identities would replace page
numbers of the back-of-book-index, where each set
, y
{}
x
n
contains identities of patterns that share the
coordinate pair
(, )
x
y
.
3.3 Introductory Example of
Indexing-Based Pattern
Recognition
Let consider a pattern recognition example where
elements of feature sets are 2D-features, which are
(, )
x
y
- coordinates of dark (below a certain grey
level) dots, that is, pixel coordinates are used as raw
features of image objects. Figure 2 shows an example,
where the shapes 1 - 8 are used for training and the
distorted shapes 1a - 8a are used for testing. Note that
for recognition of distorted objects 1a - 8a the
classification system should be invariant with respect
to scaling and orientation.
Figure 2: Pictures 1 – 8 (Wikipedia, 2022) were used for learning (single image per pattern class), pictures 1a – 8a (Wikipedia,
2022) are used for testing. Pictures 1b, 3b, 7b, 8b show outputs of a scale normalization algorithm when it takes in pictures
1, 3, 7, 8, respectively.
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
224
Invariance with respect to scaling was achieved
by the normalization, whereby left-hand, right-hand,
upper and lower boundary coordinates
min max min max
,,,
x
xyy
were found and (
,
x
y
) -
coordinates of object’s dots were normalized to the
range
128D =
as follows
min max min
*( )/( )
x
Dxx x x=- -
min max min
*( )/( )yDyy y y=- -
Invariance with respect to orientation was
achieved by learning the objects 1 – 8 at a single view
angle and multiple recognition of objects 1a – 8a at
angles 0º through 360°, step 1º.
A notation for inverse patterns was introduced,
which is an indexed set
{}
x
n or
, y
{}
x
n
, where the set
element
n
is the name of a pattern class and the
indexes
x
,
y
are the feature values. The notation
, y
{}
x
n
helps to conveniently represent the algorithm
that calculates occurrence frequencies
, 1,...,
n
f
nN=
, of names in columns. Let , , 1,...,
ll
x
yl L= be the
coordinates of dark dots, where L is the number of
dark dots in the current image (image 1 through 8).
Then name occurrence frequencies are best obtained
as samples of the histogram
Algorithm 1: Name histogram evaluation.
,
1,..., , , [ , ], { } :
ll
x
ry s
lLrseenn
++
=∀∈−∀∈
1
nn
ff=+
If classification of the current input image fails,
that is,
1,...,
max ( ) <
in
iN
f
t
=
, then the new image class is
introduced, 1NN= + , and the columns are updated
using the Algorithm 2.
Algorithm 2: Updating of columns.
, ,
{} {} , 1,...,
ll ll
xy xy
nnNlL==
Here the initial conditions are
1N = ,
, ,
{} {1} , 1,...,
l
lll
xy xy
nlL==
But, the algorithm 1 cannot work properly as it
violates the exclusion rule from Section 1. That is, the
element
,
ll
x
y of the current input pattern may be
accidentally compared within the loop
,[,]rs ee∀∈−
to more than one element of a previously stored
pattern (and visa versa). This is why columns and
class names must be inhibited once they have been
accessed, which is achieved by replacing histogram
algorithm 1 with the algorithm that inhibits patterns
by flagging dirty names
01
nn
flag flag=→ = and
columns
, ,
0 = 1
xy xy
col col=→
. Then the
algorithm 1 can be re-written as Algorithm 3.
Algorithm 3: Histogram evaluation with inhibition.
1,..., , , 0, , [ , ],
n
l L n flag r s e e=∀ =∀∈−
,
{}
ll
x
ry s
nn
++
∀∈
,
if 0 and 0
n
ll
xrys
col flag
++
==
,
1, 1, 1
nn n
ll
xrys
f f col flag
++
=+ = =
Recognition accuracy (%) for distorted patterns 1a -
8a (Figure 2) at different neighborhood radiuses e is
provided in Table 1
Table 1: Recognition accuracy %.
e (pixels) 0 1 2 3 4
% 50 100 100 100 87.5
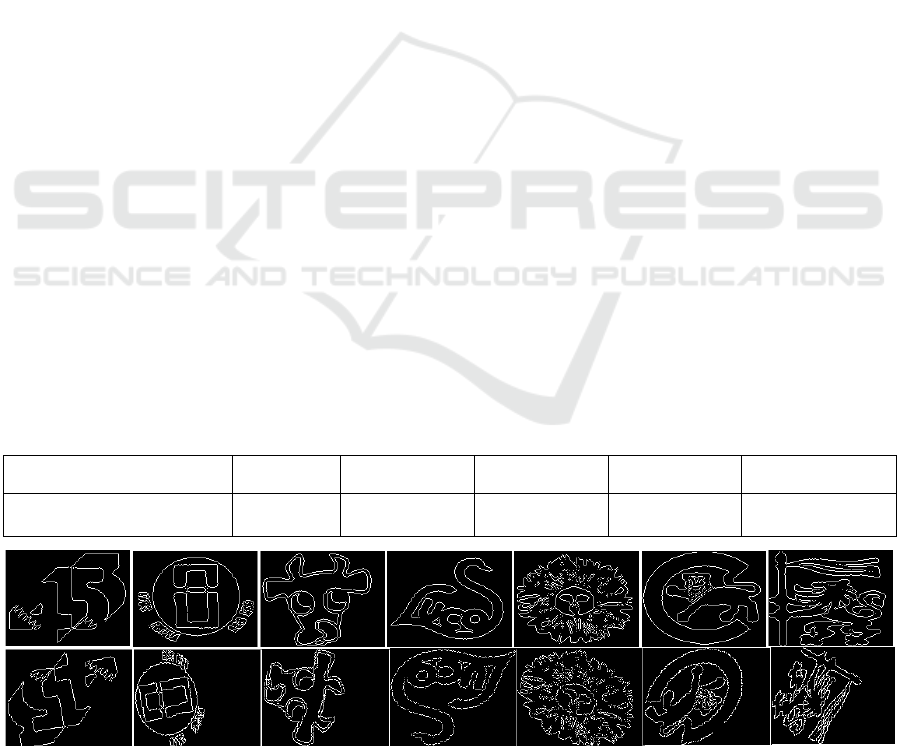
Figure 3: Some typical examples of commercial trademarks. Upper row images were used for training and bottom row images
were used for testing.
Random Quasi Intersections with Applications to Instant Machine Learning
225

Table 2: Recognition accuracy at testing of 1100 distorted commercial trademarks retrieved from (GoogleDrive, 2022).
e 0 1 2 3 4
% 98 100 100 100 99.2
3.4 Using Quasi-Intersections for
Commercial Trademark Image
Database
The same system was also trained on a database of
commercial trademarks, retrieved from
(GoogleDrive, 2022), which contains 1100 edge
images, each comprising 160 x 120 pixels (upper row
on the Figure 3 shows a few typical images out of
1100 images from this database). The training was
performed at
0e = . Next, 1100 distorted images
were used for testing (bottom row on the Figure 3
shows typical examples of distorted images and Table
2 shows the recognition accuracy.
The training time was shown to be about 3
seconds per 1000 images (pre-stored in RAM) on a
single core 1.6 GHz Intel Pentium CPU, which
amounts to 3 milliseconds per image. Although this
indexing-based non-iterative learning is impressively
fast, the burden of rotational invariance slows down
the recognition time by the factor of 360 amounting
to about 1 second per image).Pattern clustering may
emerge at learning if 0e > . But, the discussion of it is
beyond the scope of this paper
.
4 DISCUSSION
Whereas a classic intersection of two sets always
produces a single set, the quasi intersection definition
produces a multitude of possible intersections. But,
there is no way of knowing in advance which one of
them will emerge. Analogously, in quantum
mechanic, it is the quantum measurement that
localizes a particle, whose potential positions are
described by the wave function. And it is impossible
to predict, which slit the photon will go through until
a detector tells which way the particle had chosen.
Besides, the exclusion rule, whereby no two elements
of one set can simultaneously pair with one element
of the other set, reminds of Pauli Exclusion Principle
according to which no two identical fermions in any
quantum system can be in the same quantum state.
The discussed instant learning, like deep learning,
can work on raw features, which are image pixels,
meaning that no feature engineering is needed.
However, the scope of possible applications of
instant learning is not known as yet.
Implementation of quasi intersections implies
inhibition. Without inhibition the pattern scores
easily overflow expected levels, which resemble
brain circuitry organization, where excitatory neurons
are often accompanied by inhibitory neurons.
The objective of this paper is not a discussion of a
best way of implementing an image learning system,
but a proof-of-the-concept of quasi intersections
method. A better way of image recognition would be
a two or more level approach, where level 1 classifies
local features and level 2 classifies histograms of
classes of local features. Then subsets of histogram
samples will represent parts of input objects, which
resembles the activation pattern of the inferotemporal
brain region (Tsunoda et al., 2001). However, when
patterns are represented by feature vectors, rather
than feature sets, inhibition is not needed. The basics
of feature vectors’ indexing are provided in the
Appendix section.
REFERENCES
Brin S.and Page L.(1998). The Anatomy of a large-scale
hypotextual web search engine. In Computer Networks
and ISDN Systems Volume 30, Issues 1–7. Stanford
University, Stanford, CA, 94305, USA. Retrieved from
https://doi.org/10.1016/S0169-7552(98)00110-X
Sivic, J., Zisserman, A. (2009). Efficient visual search of
videos cast as text retrieval. ”. In IEEE Transactions on
Pattern Analysis and Machine Intelligence, Volume:
31, Issue: 4. doi: 10.1109/TPAMI.2008.111
Mikhailov A., Karavay M., Farkhadov M. ( 2017). Inverse
Sets in Big Data Processing. In Proceedings of the 11th
IEEE International Conference on Application of
Information and Communication Technologies
(AICT2017, Moscow). М.: IEEE, Vol. 1
https://www.researchgate.net/publication/321309177_
Inverse_Sets_in_Big_Data_Processing
Mikhailov, A., Karavay, M. (2021). Pattern Inversion as a
Pattern Recognition Method for Machine Learning. In
https://arxiv.org/abs/2108.10242.
Jaccard, P. (1901). Distribution de la flore alpine dans le
bassin des Dranses et dans quelques régions voisines.
In Bulletin de la Société Vaudoise des Sciences
Naturelles 37, 241 - 272.
Jones, K. (2004). A statistical interpretation of term
specificity and its application in retrieval . Journal of
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
226
Documentation: MCB University: MCB University
Press, Vol. 60, no. 5. - P. 493 - 502. - ISSN 0022-0418.
Wikipedia. https://en.wikipedia.org/wiki/CorrelationGoogl
eDrive. https://drive.google.com/drive/u/0/folders/1t
ZmR7le1zbZb1Jpl_j4FYS5E-sjyVDVQ
Tsunoda K., Yamane Y., Nishizaki M., Tanifuji M. (2001).
Complex objects are represented in macaque
inferotemporal cortex by the combination of feature
columns. In Nat. Neurosci. 4 (8). pp.832-838.
doi:10.1038/90547. PMID 11477430
Mikhailov, A., Karavay, M. (2018). Inverse sets in Pattern
Recognition. Inverse Sets in Pattern Recognition.
Proceedings of IEEE East-West Design & Test
Symposium (EWDTS'2018). Kazan. IEEE EWDTS,
2018. С. 323-330.
APPENDIX
A.1 Patterns are Represented by
Feature Vectors
For feature vectors, there is no need to inhibit
accessed columns, even though the non-standard
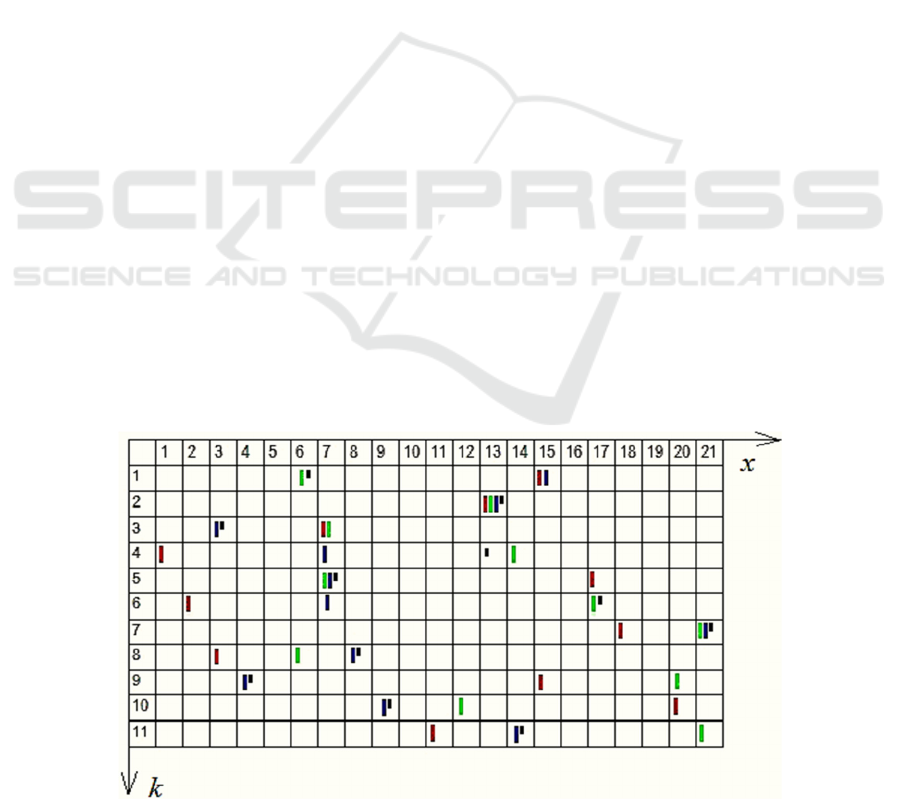
intersection definition (1) is used. Figure A.1
illustrates the above statement
.
In Figure A.1 example, x-coordinates of colored
marks represent component values of red, green and
blue 11-dimensional vectors, and k-coordinates
represent vectors’ component indexes. For instance,
the cell (15, 1) contains two vector names
, 15, 1
{} {1,3}
xk
n =
. The cell (14, 4) contains the name
of the 2
nd
vector and the cell (7, 3) contains names of
1
st
and 2
nd
vectors.
The vector coordinate values are
(15,13,7,1,17,6,18, 3,15,20,11)
red
x =
(1
st
)
(6,13,7,14,7,17,21,6, 20,12,21)
green
x =
(2
nd
)
(15,13,3,7,7,7,21,8,4,8,14)
blue
x =
(3
rd
)
(6,13,3,13,7,17,21,8,4,9,13)
black
x =
In
K
-dimensional space, the similarity between
vectors ,
n
xx
can be evaluated as the intersection with
the size | | , 1,...,
en n
XX fn N== . For vectors,
this is always a single intersection because there
exists only one way of counting coordinate pairs. It is
an implication of the following two properties of
distinct vectors with integer components (
D
is the
range of component values, any cell and its content is
referred to as a column). Given
N
memorized vectors
(a) For each dimension
k
(for each horizontal
line), any two columns do not intersect
,,
{} {} , ,
xk yk
nn xyD=∅ ∀ <
(b) For each dimension
k
, the sum of column
heights is equal to the number
N
of memorized vectors
1
,
0
|{ } |
D
xk
x
nN
−
=
=
It follows from (a), (b) that intersection sizes
||
n
xx
of the input vector
1
( ,..., ,..., )
kK
xx x x=
with
memorized vectors , 1,...,
n
xn N=
, are equal to
frequencies
n
f of vector indexes in corresponding
columns
| | , 1,...,
nn
xx fn N==
Computation of frequencies requires a definition
of inverse patterns that contain names of pattern
classes, feature sets or feature vectors.
Figure A.1: Feature vectors plain.
Random Quasi Intersections with Applications to Instant Machine Learning
227

A.2 Inverse Sets Definition
Given a collection of distinct sets
{ } , 1,...,
nn
X
xn N==, inverse set
{}
x
n
contains
indexes of sets that share the element
x
1
{} { : },
N
x
nn
n
nnxXxX
=
=∈ ∈
The sets/inverse sets transform
1
{ } , 1,..., { } ,
N
nxn
n
x
nNnxX
=
=↔ ∈
is a one-to-one correspondence.
Example. Given a collection of two sets
12
{,,}, {,, }abc bcd , inverse sets are
{1} , {1, 2} , {1, 2} , {2}
abcd
A.3 Inverse Patterns Definition
Let vectors in a K-dimensional space
,
, 1,..., , 1,...,
nk
x
kKnN==
, differ in, at least, one
component
,,
, : | |
nk mk
nm k x x e∀∃ − >
. Given N
such vectors, the inverse patterns are defined as
,
{ } { : | | }, , 1,...,
xk k
nnxxexDkK=−≤∈=
Here D is the range of vector components’ values.
Calculation of frequencies can be done by scanning
the content of
K
columns only, – even though
millions of base vectors may be given. This
replacement of similarities for frequencies minimizes
computational complexity of classification.
Frequencies are best obtained as samples of the
histogram of names found in inverse sets. In vector
case
,
, [ , ], { } : 1
nn
k
xrk
kr ee nn f f
+
∀∀∈− ∀∈ = +
(A.1)
Here
( , 1,..., )
k
x
xk K==
is the input vector. The
input vector
x
is assigned to the most similar, that is,
most frequent class
1,...,
: max ( ), if
nin
iN
nf f f t
=
=>
(A.2)
where
t
is the recognition threshold. Properties
(a), (b) imply that, in vector case, maximal frequency
cannot exceed
K
.
A.4 Unsupervised Learning
Unsupervised learning starts with recognition. If
input vector
x
is successfully recognized using the
algorithm (A.1) and the expression (A.2), then
proceed to next input vector. If recognition fails, then
the number of classes is increased by 1 and the
collection of inverse patterns is updated by inserting
into the collection the name of the new class
1) 1NN=+
2)
k
, ,
{ } { } , 1,...,
kk
xk x
nnNkK==
Initial conditions are: 1N = ,
, ,
{ } {1} , 1,...,
kk
xk xk
nkK==
Once the learning is done, the columns are no
longer updated. In case of supervised learning, the
teacher can introduce a look-up table
( ), 1,...,mclassnn N==
that relates created and
given classes.
A.5 Computational Complexity
Computational complexity of the frequency
algorithm (A.1) is proportional to the average height
of non-empty columns
, ,
(,)
1
|{ } |, {( , ):{ } }
||
xk xk
xk C
hnCxkn
C
∈
==≠∅
In turn, column height is inverse proportional to
variability radius e. The greater the radius e, the
bigger the generalization ability. As a result, less
classes N will be created, the average column height
will be reduced, which, in turn, decreases the
computational time. But, on the other hand, this
positive trend is limited by the declining
discriminating power of the system.
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
228
