
Understanding of Feature Representation in Convolutional Neural
Networks and Vision Transformer
Hiroaki Minoura
a
, Tsubasa Hirakawa
b
, Takayoshi Yamashita
c
and Hironobu Fujiyoshi
d
Chubu University, Kasugai, Aichi, Japan
Keywords:
Image Classification, Convolutional Neural Network, Vision Transformer.
Abstract:
Understanding a feature representation (e.g., object shape and texture) of an image is an important clue for
image classification tasks using deep learning models, it is important to us humans. Transformer-based ar-
chitectures such as Vision Transformer (ViT) have outperformed higher accuracy than Convolutional Neural
Networks (CNNs) on such tasks. To capture a feature representation, ViT tends to focus on the object shape
more than the classic CNNs as shown in prior work. Subsequently, the derivative methods based on self-
attention and those not based on self-attention have also been proposed. In this paper, we investigate the
feature representations captured by the derivative methods of ViT in an image classification task. Specifically,
we investigate the following using a publicly available ImageNet pre-trained model, i ) a feature representation
of either an object’s shape or texture using the derivative methods with the SIN dataset, ii ) a classification
without relying on object texture using the edge image made by the edge detection network, and iii ) the ro-
bustness of a different feature representation with a common perturbation and corrupted image. Our results
indicate that the network which focused more on shapes had an effect captured feature representations more
accurately in almost all the experiments.
1 INTRODUCTION
Following the overwhelming success of Convolu-
tional Neural Networks (CNNs) in ImageNet Large
Scale Visual Recognition Challenge (ILSVRC) 2012
challenge, CNNs have been used in numerous com-
puter vision tasks. However, Vision Transformer
(ViT) (Dosovitskiy et al., 2021) has outperformed
CNNs on image classification tasks. The ViT archi-
tecture applies a transformer (Vaswani et al., 2017)
for natural language processing to computer vision.
ViT first divides an input image into a sequence
of patches and then obtains the correspondence be-
tween patch features by self-attention (SA) to ag-
gregate the tokens and produce their representations.
ViT achieves high recognition accuracy on ImageNet
despite its simple structure. Subsequently, because
of ViT’s sucess in computer vision, many deriva-
tives (Liu et al., 2021)(Touvron et al., 2021)(Wu et al.,
2021) have been proposed.
Swin Transformer (Swin) (Liu et al., 2021) is a
widely used derivative of ViT. Swin has improved the
a
https://orcid.org/0000-0001-7373-1291
b
https://orcid.org/0000-0003-3851-5221
c
https://orcid.org/0000-0003-2631-9856
d
https://orcid.org/0000-0001-7391-4725
computational complexity of the SA within ViT and
its architecture is applicable for a wide range of com-
puter vision tasks such as object detection and seman-
tic segmentation. Additional methods have been pro-
posed, including CvT (Wu et al., 2021) of SA com-
bined with the convolution and a method that use
self-supervised learning (Caron et al., 2021)(Kaim-
ing et al., 2022) have been proposed. The majority
of these were derived from ViT’s SA-based approach.
However, ConvNeXt (Liu et al., 2022a) outperformed
ViT as a result of re-designing of ResNet (He et al.,
2016) on the the basis of ViT architecture. In addi-
tion, MLP-Mixer (Tolstikhin et al., 2021) was mod-
ified from the multi-head attention of ViT to simple
multi-layer perceptron (MLP), and PoolFormer (Yu
et al., 2022) was modified to average pooling. Non-
SA-based methods also have proposed, showing that
ViT is not necessary if the spatial features of the im-
age are captured and highlighting the need for SA in
image classification tasks.
ViT may not be required in computer vision be-
cause models such as CNN, MLP, etc. can improve
recognition. Tuli et al. (Tuli et al., 2021) analyzed the
feature representations that ViT and CNN capture in
image classification. As shown in Figure 1(a), a cat
image is transferred to an elephant texture in the SIN
Minoura, H., Hirakawa, T., Yamashita, T. and Fujiyoshi, H.
Understanding of Feature Representation in Convolutional Neural Networks and Vision Transformer.
DOI: 10.5220/0011621300003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 5: VISAPP, pages
429-436
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
429
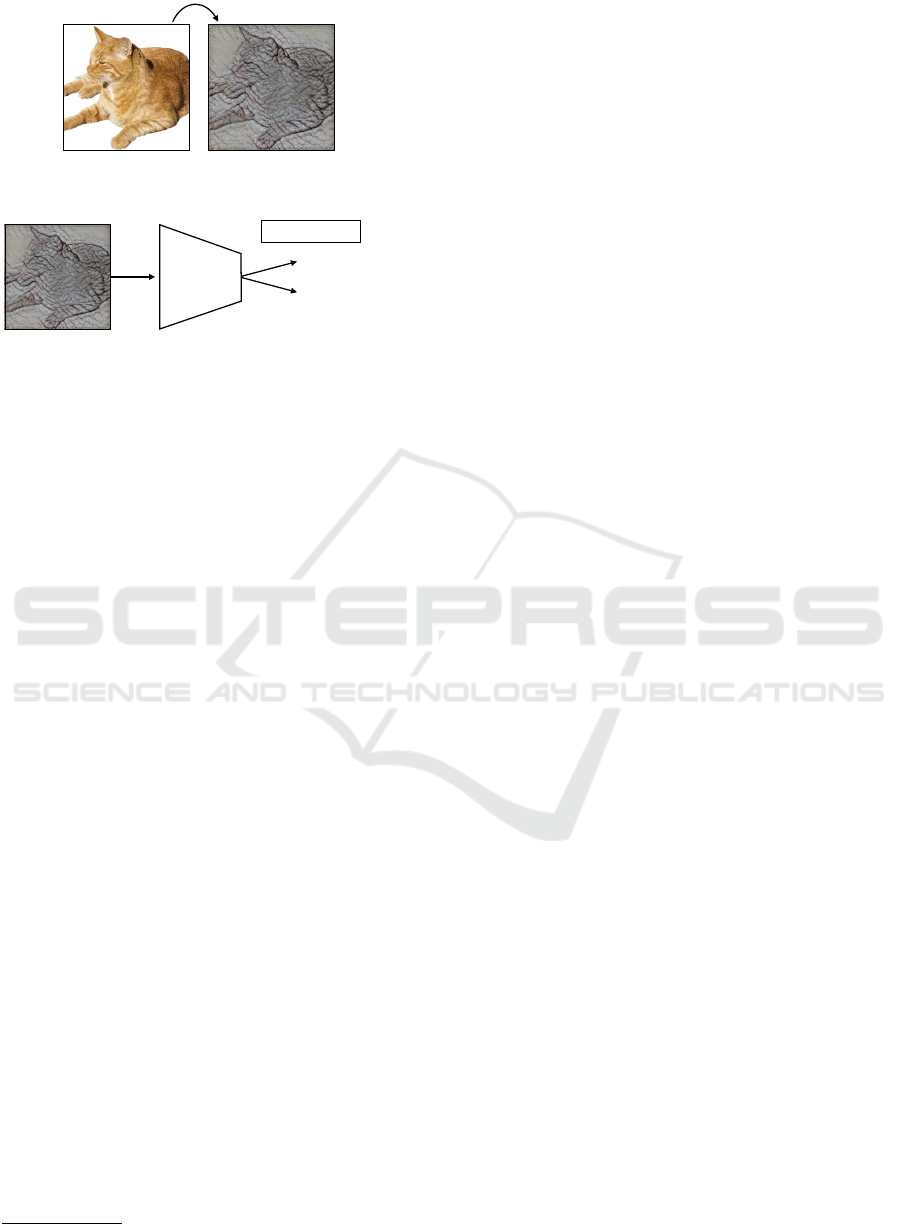
Figure 1: Evaluation method and example image from SIN
dataset. The texture is generated from the original image by
Style Transfer (Leon et al., 2016) includes shape and texture
labels. The network takes a generated image as input and
classifies it.
dataset (Robert et al., 2019). The transferred image is
given the correct label cat and texture label elephant
1
.
The evaluation method for the SIN dataset is shown in
Figure 1(b). A network (e.g., CNN or ViT) takes the
transferred image as input, and if the model classifies
the image as a cat, it focuses on the object shape. If
the model classifies the image as an elephant, it fo-
cuses on the object texture. This makes it possible to
analyze the feature representation that the model cap-
tures and recognizes. ViT has the feature representa-
tion of the object shape, while CNN has the texture
representation rather than shape.
We argue that ViT is highly effective for captur-
ing object shapes in image classification, which has
been considered difficult with conventional methods.
However, it is unclear whether the methods derived
from ViT can capture object shapes as well as ViT
itself. In this paper, we investigate the feature rep-
resentations captured by the derivative methods in an
image classification task. Specifically, we investigate
the following on a publicly available ImageNet (Deng
et al., 2009) pre-trained model. i) Feature repre-
sentation of either object shape or texture using the
derivative methods. We test the cue conflict between
texture and shape from the methods with the SIN
dataset. ii) Classification without relying on object
texture using the edge image made by the edge de-
tection network (Xavier et al., 2020). We evaluate an
image from the ImageNet validation dataset, exclud-
ing texture, using the edge detection network. The
ImageNet-sketch (Wang et al., 2019) dataset is most
1
https://github.com/rgeirhos/texture-vs-shape
suitable for our purpose, but it includes a shadow tex-
ture on the objects, which results in noisy of object
shape. We investigate whether the model can capture
the shape of the natural object by removing as much
texture as possible from the natural images using the
network. iii ) The robustness of a different feature rep-
resentation with a common perturbation and corrup-
tion image on ImageNet-C (Dan and Thomas, 2019).
We examine the robustness of the shape- and texture-
focused models to common noise (e.g., weather, blur)
that can occur in object recognition. Experimental re-
sults show that the network focusing more on shapes
has an effect on almost all the experiments.
The main contributions of this work are as fol-
lows.
• We clarify the feature representations captured by
the methods derived from ViT.
• We show the potential of learning to capture shape
for building robust models.
2 RELATED WORK
In this section, we review studies on image classifica-
tion with ViT derivative methods.
2.1 Self-Atttention Based Approach
ViT is a model that applies a Transformer to computer
vision tasks. ViT is known to outperform CNN, but in
order to do so, it needs to be pre-trained on a dataset of
300 million images. Otherwise, over-training is likely
to occur when there is insufficient data. Touvron et
al. (Touvron et al., 2021) proposed DeiT, the accu-
racy of which is comparable to CNNs with a similar
number of parameters through various data augmen-
tations and regularization, even with insufficient data.
Thus, DeiT avoids the difficulty of learning encoun-
tered in ViT. Various methods (Liu et al., 2021)(Wu
et al., 2021)(Caron et al., 2021)(Kaiming et al., 2022)
based on ViT have been proposed using the data aug-
mentations and hyperparameters set up in DeiT.
Several methods have been derived from ViT, in-
cluding one that reduces the amount of computa-
tion required for SA (Liu et al., 2021)(Wang et al.,
2021)(Hongxu et al., 2022)(Zhuofan et al., 2022) and
another that combines ViT with Convolution (Wu
et al., 2021)(Zihang et al., 2021)(Zhengzhong et al.,
2022). A method based on self-supervised learn-
ing has been proposed, which can be divided into
two approaches: one based on contrastive learning
to measure similarity between two images (Caron
et al., 2021)(Xinlei et al., 2021) and one based on
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
430

masked image modeling to reconstruct the original
image using masking patch tokens (Kaiming et al.,
2022)(Hangbo et al., 2022). In this paper, we inves-
tigate the feature representation of the representative
method from these. We also investigate the feature
representation of DeiT III (Hugo et al., 2022), which
reconsiders the data expansion of DeiT to make it eas-
ier for ViT to capture the shape.
2.2 Non-Self-Atttention-Based
Approach
Transformers are used in various tasks such as video
recognition (Liu et al., 2022b)(Anurag et al., 2021),
segmentation (Xie et al., 2021)(Zheng et al., 2021),
and generative models (Yifan et al., 2021)(Kwon-
joon et al., 2021) as it was found to be effective for
computer vision models. These methods use self-
attention based models; however, non-SA-based ap-
proach have also been proposed. For example, Liu
et al. (Liu et al., 2022a) proposed ConvNeXt for re-
designing ResNet (He et al., 2016) based on ViT ar-
chitecture. Tolstikhin et al. (Tolstikhin et al., 2021)
proposed MLP-Mixer to modify the multi-head atten-
tion of ViT to a simple MLP, in which the model is
computed by MLP for each feature map. Yu et al. (Yu
et al., 2022) proposed PoolFormer, which changes the
multi-head attention of ViT to average pooling. These
models have the MetaFormer structure, which cap-
tures spatial and dimensional features separately sim-
ilar to ViT. Therefore, the attention mechanism is es-
sentially unnecessary.
These findings lead us to reconsider the neces-
sity of ViT in computer vision. On the one hand,
ViT has enabled image classification which captures
object shapes, which is difficult with conventional
recognition models such as AlexNet, ResNet, etc. It
is unclear whether the non-SA-based approaches are
capable of capturing object shapes as well as ViT.
Thus, we investigate the feature representations of
their models to clarify the usefulness of ViT in com-
puter vision.
2.3 Robustness of Vision Transformer
Most studies on the robustness of ViT compare ViT
with ResNet. These studies (Tuli et al., 2021)(Muza-
mmal et al., 2022) have examined the object shape
and texture feature representations of ViT and CNN
with the SIN dataset (Robert et al., 2019). The robust-
ness has also been examined using natural noise im-
ages(Daquan et al., 2022)(Xiaofeng et al., 2022) and
adversarial training (Sayak and Pin-Yu, 2022)(Kaleel
et al., 2021)(Rulin et al., 2021)(Srinadh et al., 2021).
Figure 2: Example of ImageNet and Contour ImageNet.
The multi-head attention tends to capture a low-pass
filter unlike CNN, as shown in (Namuk and Songkuk,
2022)(Peihao et al., 2022). While most of the prior
studies compare classical CNN with ViT, our paper
compares state-of-the-art methods with ViT.
3 EXPERIMENTS
In this section, we test several models on public
datasets.
3.1 Evaluation Details
Datasets and Evaluation Metrics. We utilize four
widely used image datasets: SIN (Robert et al., 2019),
ImageNet (Deng et al., 2009), ImageNet-C (Dan and
Thomas, 2019), and Contour ImageNet. The SIN
dataset contains 1,280 images with style transforma-
tions between classes. In other words, there are 16
classes with 80 images per class. To compute the
score in the dataset, we calculate shape bias as the
proportion of correct shape decisions out of correct
shape decisions and correct texture decisions. We
only evaluate the subset of images for which either
the shape or texture is correctly classified.
ImageNet (IN) is evaluated on validation data
containing 50,000 images and 1,000 classes. The
edge image was created by the edge detection net-
work (Xavier et al., 2020) from ImageNet’s validation
data, which we refer to as “Contour ImageNet” (Con-
tour). The shape of the natural object is focused on by
removing as much texture as possible from the natu-
ral images using the edge detection network as shown
in Figure 2. The ImageNet-C consists of 15 (+ 4 ex-
Understanding of Feature Representation in Convolutional Neural Networks and Vision Transformer
431
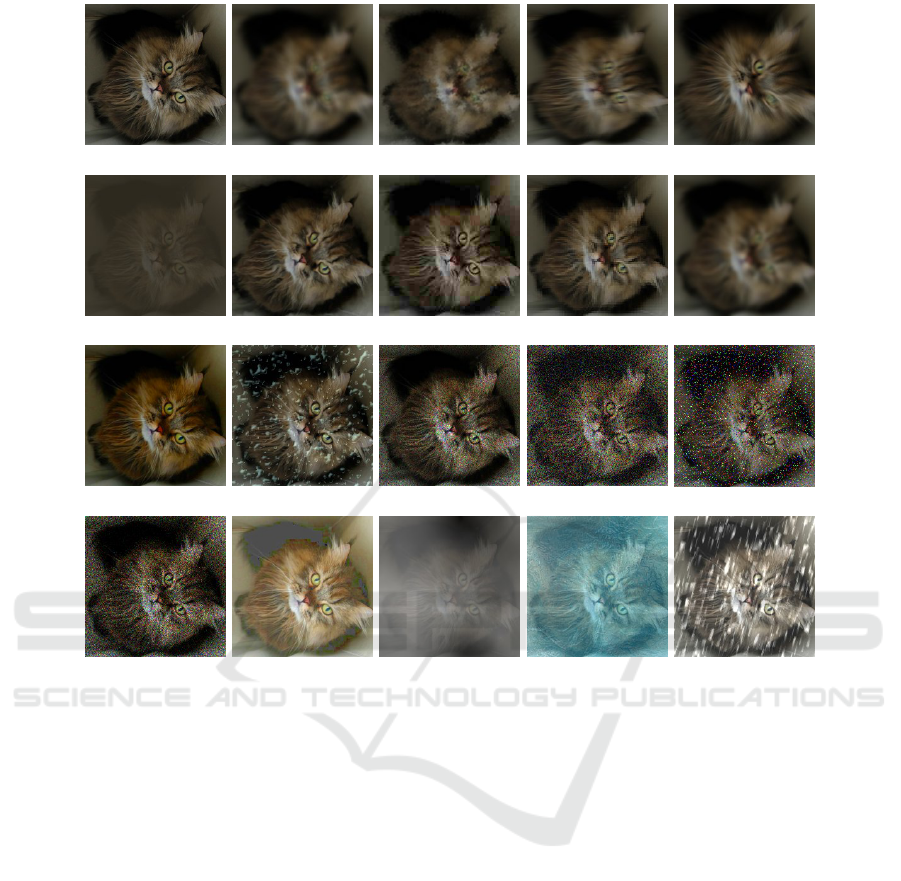
Figure 3: Example of ImageNet-C. A different corruption (blur, noise, etc.) is applied to each sample.
tra) algorithmically corruption images generated from
noise, blur, weather, and digital categories as shown
in Figure 3. Each type of corruption has five levels
of severity. In total, there are 95 distinct collapsed
images. We evaluate both the accuracy of the clean
image on ImageNet and the robustness of the model
on these datasets. We evaluate the mean corruption
error (mCE) and retention rate (Retention) following
(Dan and Thomas, 2019) and (Daquan et al., 2022) on
ImageNet-C, respectively. The CE is the robustness
calculated by dividing the top-1 error for each corrup-
tion by the AlexNet error, and mCE is the average CE.
Retention is calculated as the ratio of ImageNet-C’s
robustness accuracy to ImageNet’s clean accuracy.
Baseline Methods. We use the following baseline
methods for comparison. We use ResNet and Con-
vNeXt as CNNs, ViT, DeiT, Swin, and CVT as
conventional vision transformers, and PoolFormer
and MLPMixer as a representative model for the
Metaformer architecture. We also compare DeiT III,
which is the altered data augmentation recipe for
DeiT. These methods are trained by supervised learn-
ing. In addition, we use self-DIstillation with NO
labels (DINO) and Masked AutoEncoder (MAE) by
self-supervised learning as the method under inves-
tigation. This enables us to analyze the differences
in feature representations depending on the learning
method. In our experiments, we use the timm li-
brary (Wightman, 2019) or the official code for the
models. Among them, we selected the large model
sizes which are typically the highest performing. All
methods use ImageNet pre-trained models or Ima-
geNet21k pre-trained models fine-tuned to ImageNet.
3.2 Result of Texture vs. Shape
Figure 4 shows the fraction of shape or texture de-
cisions of each method using the SIN dataset on
ImageNet-trained models. The upper axis represents
the shape and the lower axis represents the texture.
The higher the value, the more the feature represen-
tation was captured. Note that ViT is compared with
DeiT data augmentation applied to ViT because the
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
432
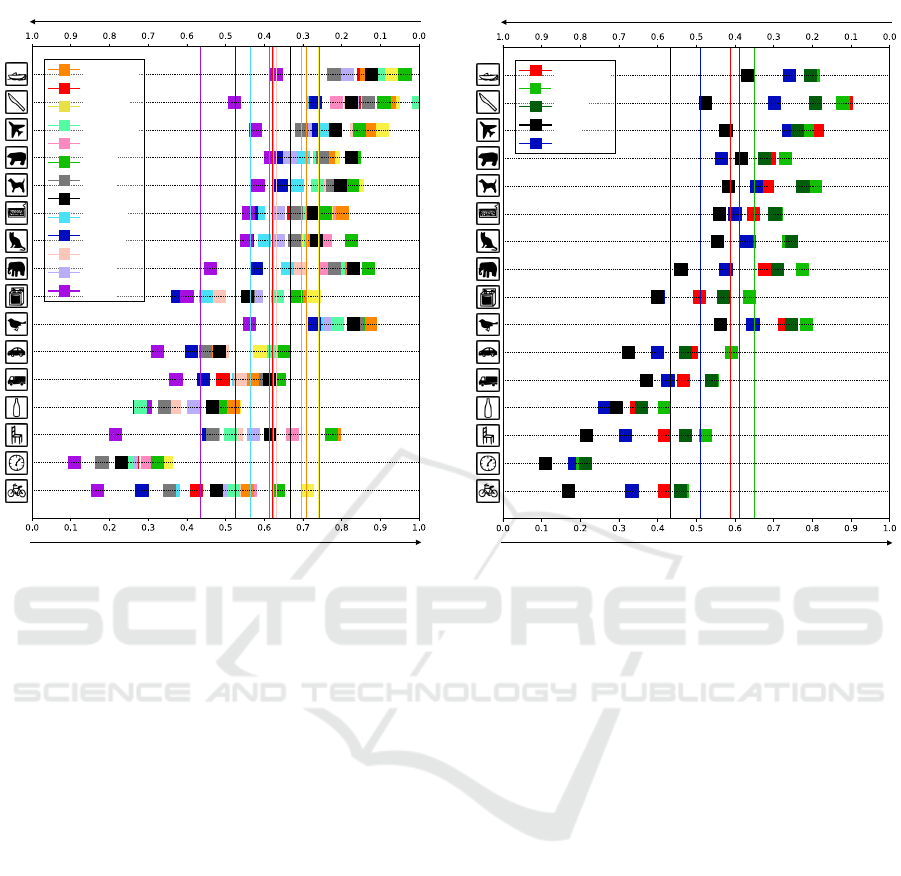
Figure 4: Classification results of shape vs. texture biases
for ImageNet-trained networks. The upper axis is the frac-
tion of shape decisions which capture the object shape. The
lower axis is the fraction of texture decisions, which capture
the object texture. Vertical lines indicate averages.
ImageNet pre-trained model is not publicly available.
DeiT III, represented by dark blue in the figure, cap-
tures the shape-like features among the supervised
learning. Meanwhile, Swin, Pool, and CvT are simi-
lar to ResNet in that they focus on textures for classifi-
cation; however, ConvNeXt with re-designed ResNet
based on ViT architecture focuses on texture and cap-
tures about 40% object shapes. Therefore, the fea-
ture representation of ConvNeXt is closer to that of
ViT. MAE captures feature representations of shapes
more accurately than DINO using the self-supervised
learning method. This is because MAE captures spa-
tial relationships between visualizable patch tokens at
the encoder and reconstructs an object contour image
to complement the masked tokens at the decoder. In
addition, the larger the model size of MAE, the more
of the shape it tends to capture. Only MAE-L rep-
resented by dark purple in the figure has captured a
feature representation focusing on object shape.
Figure 5 shows the results of ImageNet21k pre-
trained models fine-tuned to ImageNet. Overall, as
the training data increases, the models are more likely
to capture the object shape as a feature representa-
tion. In particular, only ViT, represented in the figure
Figure 5: Classification results of shape vs. texture bi-
ases on ImageNet21k pre-trained models fine-tuned to Im-
ageNet.
with black, has a shape bias. DeiT III captures shape
and texture to the same degree as the results shown
in Fig. 4. The pure ViT model tends to capture more
shape than Swin and ConvNeXt.
3.3 Quantitative Results
Table 1 compares the feature representation results of
several methods. MAE was the most effective on Im-
ageNet. DeiT III had the highest score on ImageNet
and ImageNet21k pre-trained under supervised learn-
ing.
Effectiveness of the Edge Object. DeiT III-L and
MAE most accurately captured the feature representa-
tion of the shape rather than texture, immediately fol-
lowed by ConvNeXt and DeiT III-B as shown in the
Contour column of Tab. 1. Most models effectively
captured the contour images if they performed well
on natural images and recognized contour to some ex-
tent when pre-trained on ImageNet21k. In particular,
Swin’s contour result is about three times higher than
that of the trained model on ImageNet. This indicates
that models are more likely to capture feature repre-
sentations of shapes when trained on a large dataset.
Understanding of Feature Representation in Convolutional Neural Networks and Vision Transformer
433
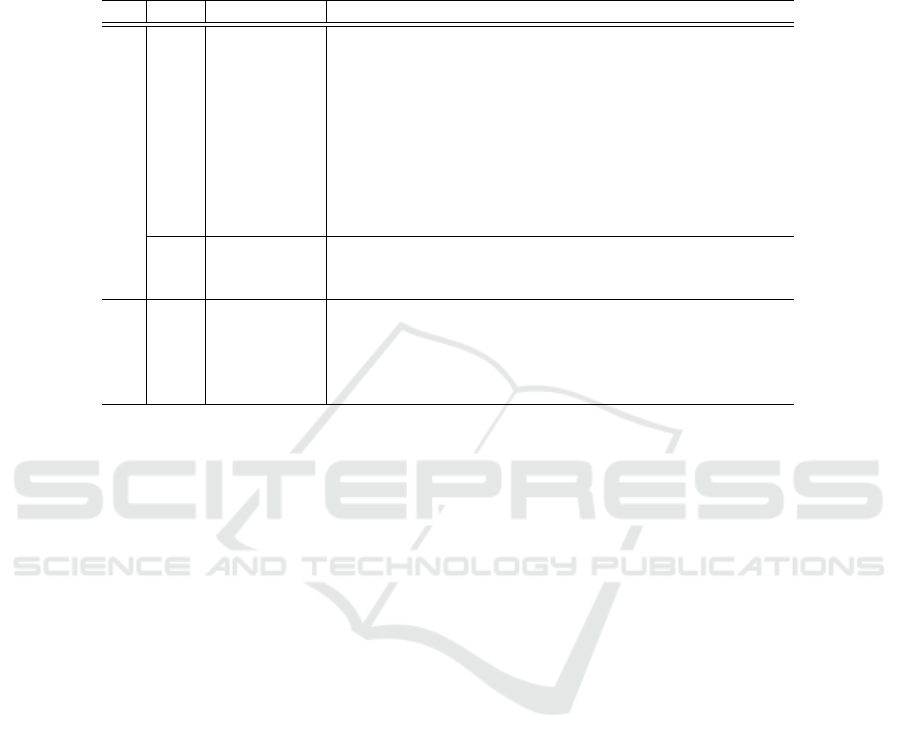
Table 1: Main results for various methods on several datasets. PT is the pre-training datasets and IN-21k is the ImageNet21k
pre-trained model fine-tuned to ImageNet. Type is the learning type, SL and SSL are the supervised learning and self-
supervised learning, respectively. IN is the top-1 accuracy on ImageNet. Contour and IN-C are evaluated the edge image
made by the edge detection network and a common perturbation and corruption image on ImageNet-C, respectively, which
affect model robustness. Retention and mCE are the evaluation metrics with respect to model robustness and mean CE,
respectively.
PT Type Method IN (↑) Contour (↑) IN-C (↑) Retention (↑) mCE (↓)
ImageNet
SL
ResNet-152 82.3 7.1 56.5 68.6 55.6
ConvNeXt-L 84.2 12.6 64.4 76.5 45.8
Pool-48M 82.4 6.6 56.5 68.6 55.7
MLPMixer-L 68.3 2.7 34.6 50.6 83.8
CvT-21 82.5 7.1 23.3 28.3 98.5
Swin-B 83.2 5.0 58.7 70.6 52.9
DeiT-B 81.1 5.2 58.8 72.5 52.8
DeiT-L 79.7 3.6 58.6 73.4 53.0
DeiT III-B 83.7 12.7 66.2 79.1 43.5
DeiT III-L 84.6 17.2 69.6 82.3 39.2
SSL
DINO-B 78.1 4.3 53.2 63.1 59.7
MAE-B 83.6 8.9 59.5 71.2 52.1
MAE-L 85.9 16.5 67.4 78.5 42.0
IN-21k
SL
ConvNeXt-L 86.3 18.5 68.6 79.5 40.3
Swin-B 84.7 12.9 67.2 79.3 42.1
Swin-L 85.5 16.6 68.7 80.4 40.1
ViT-L 84.4 17.0 68.5 81.1 40.4
DeiT III-L 86.8 23.9 67.9 78.2 41.0
Model Robustness. In-C and Retention in Tab. 1
show the top-1 accuracy and model robustness, re-
spectively, for several methods on ImageNet-C. DeiT
III was the most effective on ImageNet, followed by
MAE and ConvNeXt. Interestingly, DeiT and Swin
scored lower than ResNet in Contour but were more
robust to noise. This result shows that SA is more
robust to noise than conventional convolution. We
also found that CvT of SA combined with convolu-
tion performed poorly on noisy images. The top-1
accuracy of the models pre-trained by ImageNet21k
performed equally well on nearly all models, and ViT
had the highest retention. Thus, ViT pre-trained on
ImageNet21k was the optimal model for balancing
accuracy and robustness, and the models pre-trained
on ImageNet21k were robust to noise.
Table 2 shows the corruption error for each noise
in ImageNet-C, and the average of these is the mCE in
Tab. 1. The results on ImageNet indicated that DeiT
III is robust to most noise among the supervised learn-
ing. For self-supervised learning, MAE is robust to
noise than DINO. The effectiveness of DeiT III and
MAE in almost all experiments shows that it is impor-
tant to apply data augmentation, structures, and learn-
ing method that capture object shape, at least when
training ViT on ImageNet. In addition, DeiT is much
more robust to blur than ResNet, indicating that DeiT
captures lower frequency components. Therefore, we
believe that multi-head attention of DeiT works as
a low-pass filter similarly to (Namuk and Songkuk,
2022)(Peihao et al., 2022). We also show that each
model is robust to the noise on ImageNet21k pre-
trained. Therefore, the model becomes more robust
to noise when trained on a larger dataset.
4 CONCLUSION
In this paper, we investigated whether the methods de-
rived from ViT capture the feature representations of
object shapes and textures in an image classification
task, and how they are affected by a common pertur-
bation and corruption image with four datasets. Ex-
perimental results show that the ViT method focusing
on shapes is robust to clean and noisy images on sev-
eral image datasets. In self-supervised learning, we
found that masked image modeling is more robust to
clean and noisy images than the contrastive learning
approach. Furthermore, we found that the model is
robust to noise when larger data is available. Our fu-
ture work will be to investigate whether learning to fo-
cus on shapes with a CNN model such as ConvNeXt
enhances accuracy and robustness to noise. We also
aim to identify derivative methods that are robust to
adversarial training.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
434
Table 2: Main results for several methods on ImageNet-C. The value is corruption error ; lower is desirable. IN is the ImageNet
pre-trained model and IN-21k is the model pre-trained on ImageNet21k and fine-tuned on ImageNet.
PT Type Method
Blur Digital Extra Noise Weather
defocus glass motion zoom contrast elastic jpeg pixelate gaussian saturate spatter speckle gaussian impulse shot brightness fog frost snow
IN
SL
ResNet-152 61.9 79.3 59.7 66.3 42.2 70.3 56.8 54.0 60.8 40.3 54.2 47.9 50.8 51.9 52.4 44.7 45.5 58.6 56.0
ConvNeXt-L 56.2 71.2 48.5 55.5 34.2 61.9 48.9 47.7 55.9 34.9 39.7 37.5 37.1 36.0 38.7 38.8 41.5 42.0 43.1
Pool-48M 65.5 82.2 59.3 66.4 42.6 74.0 59.1 60.9 64.4 40.2 49.9 47.9 48.0 47.6 50.7 43.6 51.0 49.5 56.2
MLPMixer-L 92.4 97.6 87.3 94.6 63.1 96.2 96.1 82.6 91.4 73.7 83.9 78.4 81.3 84.0 82.8 69.8 70.9 77.2 88.3
CvT-21 110.8 107.1 103.8 104.6 98.9 107.2 109.9 106.2 110.8 93.0 86.0 92.0 95.1 94.9 94.7 99.8 90.9 82.5 83.9
Swin-B 62.8 75.8 55.1 63.8 41.1 68.0 56.7 55.7 62.5 40.1 43.4 47.8 47.8 49.1 51.2 43.3 39.1 48.6 52.7
DeiT-B 60.0 68.8 57.6 65.4 50.0 61.6 57.8 51.8 59.1 45.1 47.2 44.3 47.0 46.9 48.5 45.5 46.5 46.7 53.9
DeiT-L 59.2 63.5 57.9 64.3 41.1 58.5 57.7 53.0 58.6 43.9 49.7 48.1 51.6 50.8 53.4 47.6 46.3 47.3 54.9
Deit III-B 51.1 65.3 48.4 60.0 32.9 59.6 48.5 41.8 50.0 35.0 36.8 36.5 36.1 35.8 38.1 38.4 32.4 39.4 40.3
Deit III-L 47.4 59.6 42.2 51.4 30.1 54.2 44.1 36.8 46.4 32.2 33.4 32.1 32.0 31.4 33.6 35.9 29.2 35.8 36.6
SSL
Dino-B 59.5 75.9 65.2 71.7 51.0 65.3 60.5 52.9 58.1 46.2 54.8 56.6 62.1 62.6 63.1 48.1 54.5 61.3 61.5
MAE-B 61.3 75.8 56.9 66.8 42.7 71.4 58.1 52.7 60.3 40.9 43.1 42.6 45.4 44.5 46.4 43.5 44.7 45.6 46.1
MAE-L 50.9 66.8 44.1 53.0 33.4 59.2 46.2 42.5 50.7 32.9 32.7 33.6 36.1 34.8 36.7 36.2 35.5 35.9 35.6
IN-21k
SL
ConvNeXt-L 45.4 62.4 41.7 47.3 33.5 54.5 40.8 33.8 46.7 32.4 35.1 33.8 35.2 33.3 36.2 35.5 34.7 42.3 39.8
Swin-B 49.1 65.0 44.9 53.4 34.5 57.0 44.9 37.3 49.3 34.5 34.4 35.2 37.0 36.7 37.8 35.7 32.7 39.5 40.2
Swin-L 45.9 62.6 42.6 49.6 32.6 55.1 41.7 34.6 46.5 33.2 32.8 34.0 35.9 33.9 36.6 36.4 31.7 39.2 36.7
ViT-L 45.6 53.5 41.5 50.3 31.4 52.5 42.8 33.5 44.2 34.4 36.9 33.4 36.5 36.5 37.4 35.3 35.0 44.9 40.4
DeiT III-L 41.3 58.6 43.3 49.0 34.2 55.2 38.9 32.1 41.6 31.7 35.2 37.8 42.5 39.9 43.3 34.7 35.8 44.8 37.9
REFERENCES
Anurag, A., Mostafa, D., Georg, H., Chen, S., Mario, L.,
and Cordelia, S. (2021). Vivit: A video vision trans-
former. In International Conference on Computer Vi-
sion.
Caron, M., Touvron, H., Misra, I., J
´
egou, H., Mairal, J., Bo-
janowski, P., and Joulin, A. (2021). Emerging proper-
ties in self-supervised vision transformers. In Interna-
tional Conference on Computer Vision.
Dan, H. and Thomas, D. (2019). Benchmarking neural net-
work robustness to common corruptions and perturba-
tions. In International Conference on Learning Rep-
resentations.
Daquan, Z., Zhiding, Y., Enze, X., Chaowei, X., Anima,
A., Jiashi, F., and Jose, M. A. (2022). Understanding
the robustness in vision transformers. In International
Conference on Machine Learning.
Deng, J., Dong, W., Socher, R., Li, L.-J., Kai, L., and Li, F.-
F. (2009). Imagenet: A large-scale hierarchical image
database. In Computer Vision and Pattern Recogni-
tion, pages 248–255.
Dosovitskiy, A., Beyer, L., Kolesnikov, A., Weissenborn,
D., Zhai, X., Unterthiner, T., Dehghani, M., Minderer,
M., Heigold, G., Gelly, S., Uszkoreit, J., and Houlsby,
N. (2021). An image is worth 16x16 words: Trans-
formers for image recognition at scale. In Interna-
tional Conference on Learning Representations.
Hangbo, B., Li, D., Songhao, P., and Furu, W. (2022). Beit:
Bert pre-training of image transformers. In Interna-
tional Conference on Learning Representations.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Computer Vi-
sion and Pattern Recognition.
Hongxu, Y., Arash, V., Jose, A., Arun, M., Jan, K., and
Pavlo, M. (2022). A-vit: Adaptive tokens for efficient
vision transformer. In Computer Vision and Pattern
Recognition.
Hugo, T., Matthieu, C., and Herve, J. (2022). Deit iii: Re-
venge of the vit. arXiv.
Kaiming, H., Xinlei, C., Saining, X., Yanghao, L., Piotr, D.,
and Ross, G. (2022). Masked autoencoders are scal-
able vision learners. In Computer Vision and Pattern
Recognition.
Kaleel, M., Rigel, M., and Marten, v. D. (2021). On the
robustness of vision transformers to adversarial exam-
ples. In International Conference on Computer Vision.
Kwonjoon, L., Huiwen, C., Lu, J., Han, Z., Zhuowen, T.,
and Ce, L. (2021). Vitgan: Training gans with vision
transformers. In International Conference on Learn-
ing Representations.
Leon, A. G., Alexander, S. E., and Matthias, B. (2016). Im-
age style transfer using convolutional neural networks.
In Computer Vision and Pattern Recognition, pages
2414–2423.
Liu, Z., Lin, Y., Cao, Y., Hu, H., Wei, Y., Zhang, Z., Lin, S.,
and Guo, B. (2021). Swin transformer: Hierarchical
vision transformer using shifted windows. In Interna-
tional Conference on Computer Vision.
Liu, Z., Mao, H., Wu, C.-Y., Feichtenhofer, C., Darrell, T.,
and Xie, S. (2022a). A convnet for the 2020s. In
Computer Vision and Pattern Recognition.
Liu, Z., Ning, J., Cao, Y., Wei, Y., Zhang, Z., Lin, S., and
Hu, H. (2022b). Video swin transformer. In Computer
Vision and Pattern Recognition.
Muzammal, N., Kanchana, R., Salman, K., Munawar, H.,
Fahad, S. K., and Ming-Hsuan, Y. (2022). Intriguing
properties of vision transformers. In Advances in Neu-
ral Information Processing Systems.
Namuk, P. and Songkuk, K. (2022). How do vision trans-
formers work? In International Conference on Learn-
ing Representations.
Peihao, W., Wenqing, Z., Tianlong, C., and Zhangyang,
W. (2022). Anti-oversmoothing in deep vision trans-
formers via the fourier domain analysis: From theory
to practice. In International Conference on Learning
Representations.
Robert, G., Patricia, R., Claudio, M., Matthias, B., Felix,
A. W., and Wieland, B. (2019). Imagenet-trained cnns
are biased towards texture; increasing shape bias im-
Understanding of Feature Representation in Convolutional Neural Networks and Vision Transformer
435

proves accuracy and robustness. In International Con-
ference on Learning Representations.
Rulin, S., Zhouxing, S., Jinfeng, Y., Pin-Yu, C., and Cho-
Jui, H. (2021). On the adversarial robustness of vision
transformers. arXiv.
Sayak, P. and Pin-Yu, C. (2022). Vision transformers are
robust learners. In Association for the Advancement
of Artificial Intelligence.
Srinadh, B., Ayan, C., Daniel, G., Daliang, L., Thomas, U.,
and Andreas, V. (2021). Understanding robustness of
transformers for image classification. In International
Conference on Computer Vision.
Tolstikhin, I., Houlsby, N., Kolesnikov, A., Beyer, L., Zhai,
Xiaohua Unterthiner, T., Yung, J., Steiner, A., Key-
sers, D., Uszkoreit, J., Lucic, M., and Dosovitskiy, A.
(2021). Mlp-mixer: An all-mlp architecture for vi-
sion. In Advances in Neural Information Processing
Systems.
Touvron, H., Cord, M., Douze, M., Massa, F., Sablayrolles,
A., and J ´egou, H. (2021). Training data-efficient im-
age transformers & distillation through attention. In
International Conference on Machine Learning.
Tuli, S., Dasgupta, I., Grant, E., and Griffiths, T. L. (2021).
Are convolutional neural networks or transformers
more like human vision? CogSci.
Vaswani, A., Noam, S., Niki, P., Jakob, U., Llion, J., Aidan,
N. G., Lukasz, K., and Illia, P. (2017). Attention is
all you need. In Advances in Neural Information Pro-
cessing Systems.
Wang, H., Ge, S., Lipton, Z., and Xing, E. P. (2019). Learn-
ing robust global representations by penalizing local
predictive power. In Advances in Neural Information
Processing Systems, pages 10506–10518.
Wang, W., Xie, E., Li, X., Fan, D.-P., Song, K., Liang, D.,
Lu, T., Luo, P., and Shao, L. (2021). Pyramid vision
transformer: A versatile backbone for dense predic-
tion without convolutions. In International Confer-
ence on Computer Vision, pages 568–578.
Wightman, R. (2019). Pytorch image models. In
https://github.com/rwightman/pytorch-image-models.
Wu, H., Xiao, B., Codella, N., Liu, M., Dai, X., Yuan, L.,
and Zhang, L. (2021). Cvt: Introducing convolutions
to vision transformers. In International Conference on
Computer Vision.
Xavier, S., Edgar, R., and Angel, D. S. (2020). Dense ex-
treme inception network: Towards a robust cnn model
for edge detection. In Proc. WACV, pages 1912–1921.
Xiaofeng, M., Gege, Q., Yuefeng, C., Xiaodan, L., Ranjie,
D., Shaokai, Y., Yuan, H., and Hui, X. (2022). To-
wards robust vision transformer. In Computer Vision
and Pattern Recognition.
Xie, E., Wang, W., Yu, Z., Anandkumar, A., Alvarez, J. M.,
and Luo, P. (2021). Segformer: Simple and efficient
design for semantic segmentation with transformers.
In Advances in Neural Information Processing Sys-
tems.
Xinlei, C., Saining, X., and Kaiming, H. (2021). An empiri-
cal study of training self-supervised vision transform-
ers. In International Conference on Computer Vision,
pages 9640–9649.
Yifan, J., Shiyu, C., and Zhangyang, W. (2021). Transgan:
Two pure transformers can make one strong gan, and
that can scale up. In Advances in Neural Information
Processing Systems, pages 9640–9649.
Yu, W., Luo, M., Zhou, P., Si, C., Zhou, Y., Wang, X., Feng,
J., and Yan, S. (2022). Metaformer is actually what
you need for vision. In Computer Vision and Pattern
Recognition.
Zheng, S., Lu, J., Zhao, H., Zhu, X., Luo, Z., Wang, Y.,
Fu, Y., Feng, J., Xiang, T., Torr, P. H., and Zhang,
L. (2021). Rethinking semantic segmentation from a
sequence-to-sequence perspective with transformers.
In Computer Vision and Pattern Recognition.
Zhengzhong, T., Hossein, T., Han, Z., Feng, Y., Peyman,
M., Alan, B., and Yinxiao, L. (2022). Maxvit: Multi-
axis vision transformer. In European Conference on
Computer Vision.
Zhuofan, X., Xuran, P., Shiji, S., Li, E. L., and Gao, H.
(2022). Vision transformer with deformable attention.
In Computer Vision and Pattern Recognition.
Zihang, D., Hanxiao, L., Quoc, V. L., and Mingxing, T.
(2021). Coatnet: Marrying convolution and attention
for all data sizes. In Advances in Neural Information
Processing Systems, pages 3965–3977.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
436
