Classification and Embedding of Semantic Scene Graphs for Active
Cross-Domain Self-Localization
Yoshida Mitsuki, Yamamoto Ryogo, Wakayama Kazuki, Hiroki Tomoe and Tanaka Kanji
Graduate School of Engineering, University of Fukui, Fukui, Japan
Keywords:
Active Cross-Domain Self-Localization, Semantic Scene Graph, Scene Graph Classifier, Scene Graph
Embedding.
Abstract:
In visual robot self-localization, semantic scene graph (S2G) has attracted recent research attention as a valu-
able scene model that is robust against both viewpoint and appearance changes. However, the use of S2G in the
context of active self-localization has not been sufficiently explored yet. In general, an active self-localization
system consists of two essential modules. One is the visual place recognition (VPR) model, which aims to clas-
sify an input scene to a specific place class. The other is the next-best-view (NBV) planner, which aims to map
the current state to the NBV action. We propose an efficient trainable framework of active self-localization
in which a graph neural network (GNN) is effectively shared by these two modules. Specifically, first, the
GNN is trained as a S2G classifier for VPR in a self-supervised learning manner. Second, the trained GNN
is reused as a means of the dissimilarity-based embedding to map an S2G to the fixed-length state vector. To
summarize, our approach uses the GNN in two ways: (1) passive single-view self-localization, (2) knowledge
transfer from passive to active self-localization. Experiments using the public NCLT dataset have shown that
the proposed framework outperforms other baseline self-localization methods.
1 INTRODUCTION
Cross-domain visual robot self-localization is the
problem of predicting the robot pose from on-board
camera image using an environment model (e.g.,
map), which was previously trained in different do-
mains (e.g., weathers, seasons, times of the day).
A large body of self-localization literature focuses
on designing or training the models that are ro-
bust to changes in appearance and viewpoint. Most
of them assume a single-view self-localization sce-
nario and do not consider viewpoint planning or ob-
server control issues. However, such a passive self-
localization problem is essentially ill-posed when cur-
rent live images are from a previously unseen do-
main. Existing solutions can be negatively influenced
by environmental and optical effects, such as occlu-
sions, dynamic objects, confusing features, illumi-
nation changes, and distortions. One promising ap-
proach to address this issue is to consider an active
self-localization scenario (Gottipati et al., 2019), in
which an active observer (i.e., robot) can adapt its
viewpoint trajectory, avoiding non-salient scenes that
provide no landmark view, or moving efficiently to-
wards places which are most informative, in the sense
of reducing the sensing and computation costs. This
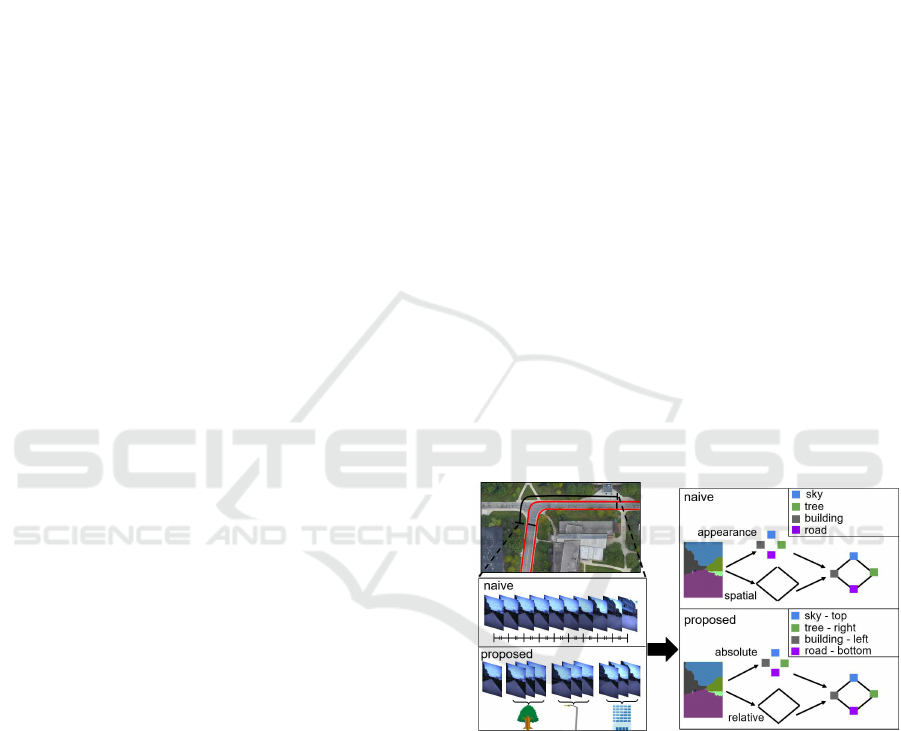
Figure 1: The nodes and edges in a semantic scene graph
represent the absolute attribute of an image region and the
relative attribute between a region pair, respectively.
is most closely related to the next-best-view (NBV)
problem studied in machine vision literature. How-
ever, in our cross-domain setting, a difficulty arises
from the fact that the NBV planner is trained and
tested in different domains. Existing NBV methods
that do not take into account domain shifts would be
confused and deteriorated by the domain-shifts, and
require significant efforts for adapting them to a new
domain.
In this work, we present a novel framework for
active cross-domain self-localization based on the se-
562
Mitsuki, Y., Ryogo, Y., Kazuki, W., Tomoe, H. and Kanji, T.
Classification and Embedding of Semantic Scene Graphs for Active Cross-Domain Self-Localization.
DOI: 10.5220/0011621200003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 4: VISAPP, pages
562-569
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

mantic scene graph (S2G), as shown in Fig. 1. In
general, an active self-localization system consists of
two essential modules (Gottipati et al., 2019):
(1) Visual place recognition (VPR) model, to classify
an input scene to a specific place class;
(2) Next-best-view(NBV) planner, to map the current
state to the next-best-view action.
We are motivated by recent findings that S2G is a
valuable scene model that is robust to both view-
point and appearance changes (Gawel et al., 2018).
In our approach, a trainable S2G classifier is effec-
tively shared by these two modules. Specifically, first,
a graph neural network (GNN) is trained as the VPR
module in a self-supervised learning manner. Sec-
ond, the trained GNN is reused as an S2G embed-
ding model to transfer the state recognition ability of
the trained GNN to the NBV planner module. Ex-
periments using the public NCLT dataset (Carlevaris-
Bianco et al., 2016) have shown that the GNN clas-
sifier based on the semantic scene graph outperforms
other baseline self-localization methods. It was also
shown that the proposed dissimilarity-based graph
embedding generates good NBV action plans in the
NBV planning task.
2 RELATED WORK
2.1 Cross-Domain Self-Localization
Self-localization under changes in viewpoint and ap-
pearance is a challenging problem, and has been ex-
tensively studied (Lowry et al., 2016; Garg et al.,
2021; Zhang et al., 2021). Early works explored
local feature based self-localization approaches such
as bag-of-words (Cummins and Newman, 2011), in
which a query/map image is described by a collection
of local visual features. However, such a local feature
approach ignores contextual information (e.g., spatial
information) of the entire image, and is vulnerable to
changes in appearance caused by weather or seasonal
changes. To address this issue, some works employ
global features to improve robustness against appear-
ance changes. For example, GIST (Oliva and Tor-
ralba, 2001), a representative global feature, uses a
fixed-length feature vector to precisely describe and
match the contextual information of the entire im-
age. However, since global features depend on the
information of the entire image, they are vulnerable
to viewpoint changes. Recently, attempts have been
made to improve the discriminative power of local
and global features using deep learning techniques
(Zhang et al., 2021). However, the vulnerability to
change is inherent in local and global visual features
and has not been overcome yet.
2.2 Semantic Scene Graphs
In recent years, semantic scene graphs (S2G) have
attracted attention from researchers as a robust self-
localization method under both appearance and view-
point changes (Gawel et al., 2018). A semantic scene
graph is an attributed graph whose nodes and edges
describe semantically attributed image regions and
relationship between them. Many studies have for-
mulated the S2G-based self-localization as a graph
matching problem (Kong et al., 2020). For exam-
ple, the X-View method in (Gawel et al., 2018) em-
ploys a graph matching algorithm based on random
walk to obtain improved robustness under appearance
and viewpoint changes. However, graph matching
techniques rely on structured pattern recognition al-
gorithms, and thus suffer from increasing computa-
tion cost. On the other hand, graph embeddings have
gained attention as a way to reduce the costly graph
matching problem to an efficient machine learning
problem (Cai et al., 2018). However, its preprocess-
ing typically requires supervised learning of a graph
embedding model, which limits its applicability to
autonomous mobile robots. Recently, graph neural
network (GNN) has emerged as a means of machine
learning directly on general graph data without requir-
ing graph embedding. This has motivated us to use
the GNN classifier as a method for visual place clas-
sifier.
2.3 Graph Embedding
The graph embedding formulation considered in our
study is most closely related to the dissimilarity-based
graph embedding scheme, one of representativegraph
embedding approaches in the field of computer vi-
sion and pattern recognition (Borzeshi et al., 2013).
The dissimilarity-based embedding aims to describe
an input graph by its dissimilarity to a set of pre-
defined prototype graphs. However, the choice of
dissimilarity measure is application dependent and
no general solution exists. Some methods employ
graph edit distance as a means of dissimilarity mea-
sure (Wang et al., 2021). However, such a structured
pattern recognition algorithm suffers from high com-
putational cost. Several recent works attempt to train
efficient graph embedding models by deep learning.
However, they follow a supervised learning protocol
and require costly supervision, which is not available
in our autonomous robot applications. In contrast, our
approach reuses the pre-trained passive GNN classi-
Classification and Embedding of Semantic Scene Graphs for Active Cross-Domain Self-Localization
563
fier as the dissimilarity model. This approach is ap-
pealing in terms of training efficiency and real-time
performance. Specifically, the GNN classifier can be
a novel computationally-efficient dissimilarity mea-
sure, because it does not require costly structured-
pattern recognition nor supervised graph embedding
networks.
2.4 Next-Best-View Planners
Several researchers have studied the problem of next-
best-view planning for active robot self-localization.
In (Burgard et al., 1997), an active self-localization
task was addressed by extending the Markov local-
ization framework for action planning. In (Feder
et al., 1999), an appearance-based active observer
for a micro-aerial vehicle was presented. In (Chap-
lot et al., 2018), a deep neural network-based exten-
sion of active self-localization was addressed using
a learned policy model. In (Gottipati et al., 2019),
the policy model and the perceptual and likelihood
models were completely learned. In (Chaplot et al.,
2020), a neural network-based active SLAM frame-
work was investigated. However, these existing stud-
ies suppose in-domain scenarios, where the changes
in appearance and viewpoint between the training
and test domains was not significant. The availabil-
ity of domain-invariant landmarks was often assumed
(e.g., (Tanaka, 2021)). In contrast, in our work, the
challenging cross-domain active self-localization sce-
nario is addressed by utilizing a deep graph neural
network in two ways: passive self-localization (i.e.,
visual place recognizer) and active self-localization
(i.e., next-best-view planner).
2.5 Relation to Existing Works
To our knowledge, this work is the first to study se-
mantic scene graph (S2G) in the challenging sce-
nario of active cross-domain self-localization. Ex-
isting machine learning approaches require as input
fixed-length feature vectors such as local and global
features. However, they had the limitation of being
vulnerable to changes in viewpoint and appearance.
Our approach employs a new scene model, the se-
mantic scene graph (S2G), which is robust to both
types of change. However, S2G is no longer a fixed-
length feature vector, and thus cannot be dealt with by
most machine learning frameworks. The graph neu-
ral network (GNN) used in our research is a valuable
recently emerging machine learning framework that
can directly process graph data. Moreover, we ex-
plore to reuse the trained GNN as a means of embed-
ding an S2G to a fixed vector, which is then used as
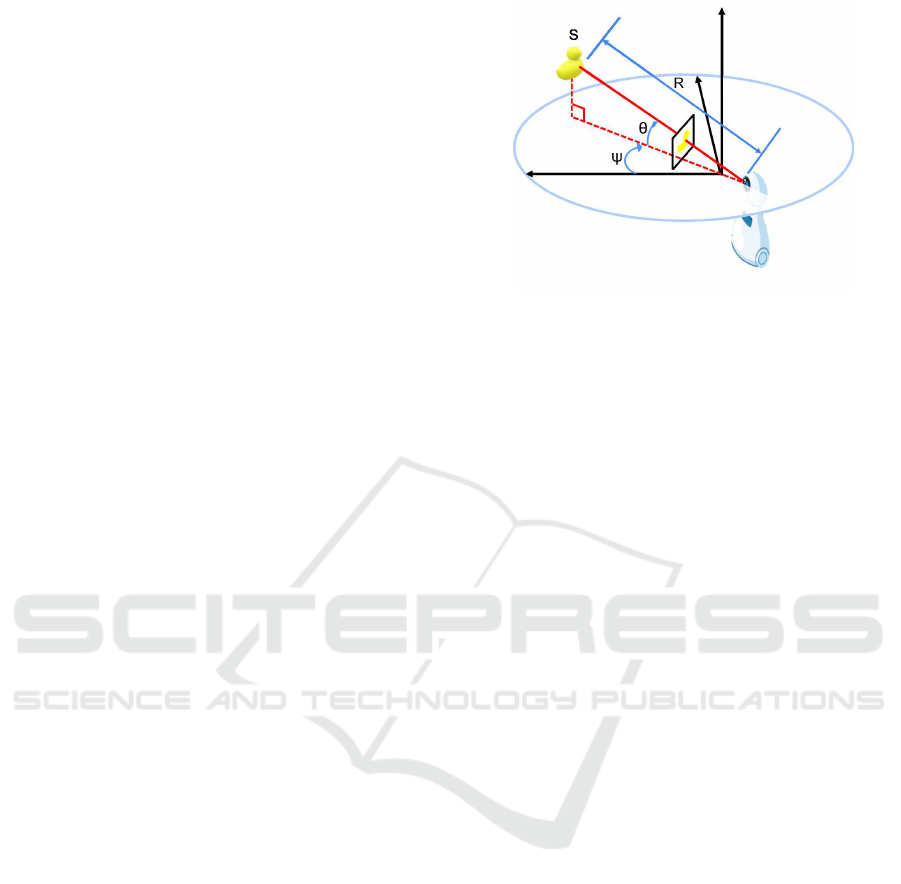
Figure 2: Bearing-range-semantic (BRS) measurement
model. The bearing, range, and semantics are observed in
an image, as the location, area, and semantic label, respec-
tively, of an object region. Then, the three-dimensional B-
R-S space is quantized to obtain a compact 189-dim 1-hot
vector (i.e., an 8-bit descriptor).
the discriminative state vector for training the view-
point planner. Consequently, in our approach, GNNs
are utilized not only as passive S2G classifiers, but
also as a means of knowledge transfer from passive to
active self-localization.
3 APPROACH
The proposed framework consists of two main mod-
ules: (offline) training module and (online) test mod-
ule. In addition, a scene graph descriptor sub-module
is employed by the both modules. These modules are
detailed in the following subsections.
3.1 Semantic Scene Graph
We employ a simple bottom-up procedure for scene
parsing, to generate a semantic scene graph from a
given query/map image. First, semantic labels are
assigned to pixels using DeepLab v3+ (Chen et al.,
2018), which was pretrained on Cityscapes dataset.
Then, regions smaller than 100 pixels are regarded as
not characterizing the input scene, and removed. Sub-
sequently, connected regions with the same semantic
labels are identified using a flood-fill algorithm (He
et al., 2019), and each region is assigned a unique re-
gion ID. Next, each region is connected to each of
its adjacent regions by a graph edge. As a result, a
semantic scene graph with the nodes and edges de-
scribed above is obtained.
We observe that not only semantic information but
also spatial information is important in the robotic
applications. This spatial information is particularly
important in the SLAM field, and existing SLAM
frameworks are classified into several categories ac-
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
564

Figure 3: Using edges enables to distinguish between two
similar but different scene layouts, as in this example.
cording to the type of spatial information, such as
range-bearing SLAM (Ramezani et al., 2020), range-
only SLAM (Song et al., 2019), and bearing-only
SLAM (Bj et al., 2017). Our problem formulation
falls into an alternative category of bearing-range-
semantic (BRS) -based self-localization (Fig. 2).
Specifically, in our approach, a semantic scene
graph is computed in the following procedure.
First, the semantic labels output by a seman-
tic segmentation network in (Ronneberger et al.,
2015) were re-categorized into seven different se-
mantic category IDs: “sky,” “tree,” “building,”
“pole,” “road,” “traffic sign,” and “the others”
which respectively correspond to the labels {“sky”},
{“vegetation”}, {“building”}, {“pole”}, {“road,”
“sidewalk”}, {“traffic-light,” “traffic-sign”}, and
{“person,” “rider,” “car,” “truck,” “bus,” “train,” “mo-
torcycle,” “bicycle,” “wall,” “fence,” “terrain”} in the
original label space. The location of the region center
was quantized into nine “bearing” category IDs by a
3×3 regular grid imposed on the image frame. Area
of the region was quantized into three “range” cate-
gory IDs: “short distance (larger than 150 K pixels),”
“medium distance (50 K-150 K pixels),” and “long
distance (smaller than 50 K)” for 616×808 image. Fi-
nally, these semantic, bearing and range category IDs
are combined to obtain a (7×3×9=) 189-dim 1-hot
vector as the node descriptor.
We observe that the nodes and edges represent two
different aspect of the spatial information, which can
act as error detection codes (C´orcoles et al., 2015) that
complement each other. Specifically, an edge is suit-
able for describing the relative feature (e.g., position-
relationship), while a node is suitable for describing
the absolute feature (e.g., position). Figure 3 illus-
trates an example showing how the use of edge infor-
mation helps to discriminate a near-duplicate scene
pair, which the node descriptor alone could not dis-
criminate.
We also adopted a region merging technique, in-
spired by a recent work in (Matejek et al., 2019).
Specifically, we remove regions smaller than 1,000
pixels (for 616×808 image). We noted this sim-
ple technique to be quite effective in improving self-
localization performance.
3.2 Visual Place Recognition
Self-localization from semantic scene graph is di-
rectly addressed by graph convolutional neural net-
work (GCN) (Wang et al., 2019) -based visual place
classifier. GCN is one of most popular approaches to
graph neural networks. Specifically, we aim to train a
GCN as a visual place classifier, which takes a single-
view image and predicts the place class.
For the definition of place classes, we follow the
grid-based partitioning in (Kim et al., 2019). In
the experimental environment, this yields 10×10 grid
cells and 100 place classes in total.
In this study, a GCN is trained by using the se-
mantic scene graphs as the training data. The graph
convolution operation takes a node v
i
in the graph and
processes it in the following manner. First, it receives
messages from nodes connected by the edge. The
collected messages are then summed via the SUM
function. The result is passed through a single-layer
fully connected neural network followed by a non-
linear transformation for conversion into a new fea-
ture vector. In this study, we used the rectified lin-
ear unit (ReLU) operation as the nonlinear transfor-
mation. The process was applied to all the nodes in
the graph in each iteration, yielding a new graph that
had the same shape as the original graph but updated
node features. The iterative process was repeated L
times, where L represents the ID of the last GCN
layer. After the graph node information obtained in
this manner were averaged, the probability value vec-
tor of the prediction for the graph was obtained by
applying the fully connected layer and the softmax
function. For implementation, we used the deep graph
library (Wang et al., 2019) on the Pytorch backend.
In the multi-view self-localization scenario, the
latest viewimage/odometry measurement at each time
is incrementally fused into the belief state. For the
information fusion, the standard Bayes filter-based
information fusion as in (Dellaert et al., 1999) is
adopted. The motion and perception models of the
Bayes filter are adopted to our specific application do-
main. Specifically, a motion corresponds to a forward
move along the viewpoint trajectory, and a percep-
tion corresponds to a class-specific probability den-
sity vector (PDV) output by the GCN. In implementa-
tion, a slightly simplified motion and perception mod-
els are used. First, the marginalization step associated
with the robot motion model was skipped by utiliz-
ing a noise-free motion model. Then, the Bayes rule
Classification and Embedding of Semantic Scene Graphs for Active Cross-Domain Self-Localization
565

step associated with the robot perception model was
replaced with a reciprocal rank fusion operation in
(Cormack et al., 2009).
The spatial resolution of the Bayes filter state
space (e.g., 1 m) is required to be the same or higher
than that of the odometer sensor, which is much
higher than that of the state space of visual place clas-
sifier. Conversionbetween two state vectors with such
different spatial resolutions is simply implemented as
a marginalization operation.
3.3 Next-best-View Planning
The next-best-view planning is formulated as a
reinforcement-learning (RL) problem, in which a
learning agent interacts with a stochastic environ-
ment. The interaction is modeled as a discrete-time
discounted Markov decision process (MDP). A dis-
counted MDP is a quintuple (S, A, P, R, γ), where S
and A are the set of states and actions, respectively.
P denotes the state transition distribution, R denotes
the reward function, and γ ∈ (0, 1) denotes a discount
factor (γ = 0.9). The learning rate was set to α =0.1.
We denoted P(·|s, a) and r(s, a) as the probability dis-
tribution over the next state and the immediate reward
of performing an action a for a state s, respectively.
Specifically, the state s is defined as the class-specific
reciprocal rank vector, output by the GCN classifier.
The action a is defined as a forward movement along
the route.
In the experiments, we use a specific implementa-
tion as shown below. The action set is a size 10 set of
candidates of forward movement along the predefined
trajectories A ={1, 2, · ·· , 10} (m). Each training/test
episode is a length n = 4 perception-plan-action se-
quence. The RL is trained by the recently developed
efficient RL scheme of nearest neighbor Q-learning
(NNQL) (Shah and Xie, 2018) with neighborhood
factor k = 4. The immediate reward is provided at
the final viewpoint of each training episode, as the re-
ciprocal rank value of the ground truth place-class.
4 EXPERIMENTS
The proposed method was evaluated in an active
cross-domain self-localization scenario. The goal of
the evaluation was to validate whether the GCN-based
classifier and embedding of semantic scene graph
could boost the performance in both the passive and
active self-localization modules.
Figure 4: Experimental environments. The trajectories
of the four datasets, “2012/1/22,” “2012/3/31,” “2012/8/4,”
and “2012/11/17,” used in our experiments are visualized in
green, purple, blue, and light-blue curves, respectively.
4.1 Dataset
The public NCLT long-term autonomy dataset
(Carlevaris-Bianco et al., 2016) was used in the ex-
periments (Fig. 4). The dataset was collected through
multi-session navigation under various weather, sea-
sons and times of day over multiple years using a
Segway vehicle at the University of Michigan North
Campus. While the vehicle travels seamlessly in-
doors and outdoors, the vehicle encountered various
geometric changes (e.g., object placement changes,
pedestrians, car parking/stopping) and photometric
changes (e.g., lighting conditions, shadows, and oc-
clusions).
In particular, we supposed a challenging cross-
season self-localization scenario, in which the self-
localization system is trained and tested in differ-
ent seasons (i.e., domains). Specifically, four sea-
sons’ datasets “2012/1/22 (WI),” “2012/3/31 (SP),”
“2012/8/4 (SU),” and “2012/11/17 (AU)” were used
to create four different training-test seasons pairs:
(WI, SP), (SP, SU), (SU, AU), and (AU, WI). Addi-
tionally, an extra season “2012/5/11 (EX)” was used
to train the visual place classifier. That is, the clas-
sifier was trained only once in the season EX, prior
to the self-localization tasks, and then the learned
classifier parameters were commonly used for all the
training-test season pairs. The number of training and
test episodes were 10,000 and 1,000, respectively.
4.2 Comparing Methods
Three different self-localization methods, GCN, naive
Bayes nearest neighbor (NBNN), and k-nearest
neighbor (kNN) were evaluated. The GCN is the
proposed method that uses GCN in two ways, VPR
and NBV from a semantic scene graph (S2G), as de-
scribed in Section 3. Other comparing methods are
non-S2G-based methods, which ignore graph edges
and represent an input image as a collection of image
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
566
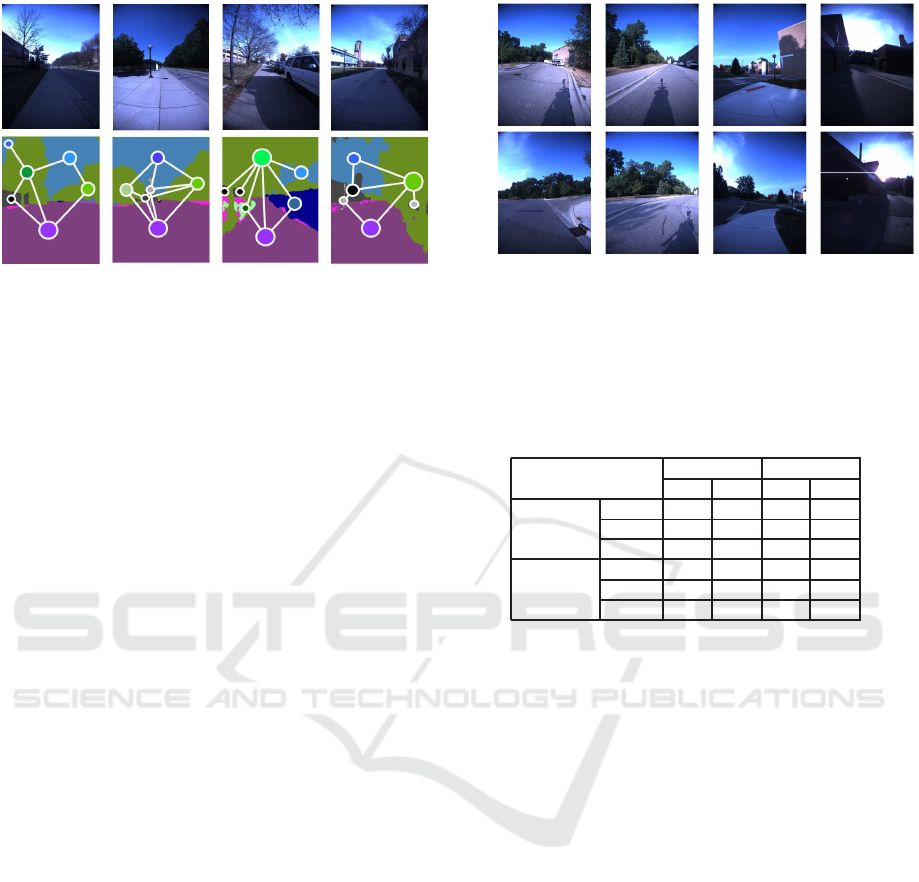
(a) (b) (c) (d)
Figure 5: Examples of semantic scene graph. Top: The in-
put scene. Bottom: The corresponding scene graphs over-
laid on the semantic label image.
regions. For fair comparison, the same node regions
used in the proposed method were used as the image
regions in the comparing methods. NBNN and kNN
methods are based on measuring dissimilarities in the
node feature set between a query-map pair of inter-
est. NBNN (Tommasi and Caputo, 2013) is one of
the best known methods to measure dissimilarities be-
tween such a feature set pair. In that, the L2 distance
from the nearest-neighbor map feature to each query
feature is computed, and then it is averaged over all
the query features, which yields the NBNN dissimi-
larity value. kNN is a traditional non-parametric clas-
sification method based on the nearest-neighbor train-
ing sample in the feature space, in which the class la-
bels most often assigned to the training samples of the
kNN (i.e., minimum L2 norm) are returned as classi-
fication results. In that, an image is described by a
189-dim histogram vector by aggregating all the node
features that belong to the image.
4.3 Performance Index
Self-localization performance was evaluated in terms
of top-1 accuracy. The evaluation procedure was as
follows. First, self-localization performance at all
viewpoints of the query episode, and not just the fi-
nal viewpoint, were computed. Then, top-1 accuracy
at each viewpoint was computed from the latest Bayes
filter output based on whether the class with highest
belief value matches the ground-truth.
4.4 Results
Figure 5 shows semantic scene graphs used in the ex-
periments. Notably, the domain-invariant scene parts
(e.g., buildings and roads) of the input scenes tended
to be selected as the dominant parts.
Figure 6 shows examples of views before and after
(a) (b) (c) (d)
Figure 6: Next-best-view planning results. In each figure,
the bottom and top panels show the view image before and
after the planned next-best-view actions, respectively.
Table 1: Performance results.
“RM”: region merging, “S”: semantic, “BRS”: bearing-range-semantic,
“VPR”: visual place recognition (w/ random action planning),
“VPR+NBV”: VPR w/ next-best-view planning
w/ RM w/o RM
S BRS S BRS
GCN 11.7 18.9 12.0 19.1
VPR kNN 5.8 15.6 6.3 12.9
NBNN 1.3 3.4 1.4 3.5
GCN 19.9 31.4 19.5 32.3
VPR+NBV kNN 10.9 28.4 11.2 24.8
NBNN 2.2 4.7 2.7 4.6
planned next-best-view actions. Intuitively convinc-
ing behavior of the robot was observed. Before the
move, the scene was a non-salient one consisting only
of the sky, the road, and the trees (Fig. 6 a,b,c), or the
field of view was very narrow due to occlusions (Fig.
6d). After the move, landmark objects came into view
(Fig. 6 a,c) or additional landmarks appeared (Fig. 6
b,d). Such behaviors are intuitively appropriate and
effective for seeking and tracking landmarks when a
human becomes lost and looks for familiar landmark
objects. Our approach enables the robot to learn such
an appropriate state-to-action mapping from available
visual experience.
Series of experiments were conducted to observe
the effects of individual components, including the
graph edges and the region merging. Table 1 lists
the results of the proposed next-best-view planner
(“VPR+NBV”) and a baseline planner with random
action planning (“VPR”). Moreover, we compared
the proposed BRS-based region descriptor (“BRS”)
with the baseline semantic label-based region descrip-
tor (“S”). Notably, the proposed method yielded a su-
perior performance compared to the other methods.
The technique of region merging contributed to re-
duce the number of nodes while retaining the self-
localization performance. The number of nodes was
reduced from 19.8 to 7.2 per semantic scene graph on
Classification and Embedding of Semantic Scene Graphs for Active Cross-Domain Self-Localization
567

Table 2: Ablation studies.
Training-Test SP-SU SU-AU AU-WI WI-SP
BRS regions 23.8 14.8 15.3 21.7
BRS image 21.4 13.9 13.7 20.1
B-R-S regions 20.1 12.2 13.7 19.2
average, which results in the reduction of computa-
tion time for self-localization from 0.82 ms to 0.16
ms. Particularly, the use of edge feature and the next-
best-view planner often significantly boosted the self-
localization performance.
Table 2 lists the results of additional ablation
studies. Here, we verified the importance of graph
topology and region descriptors. In the table, “BRS
regions” and “B-R-S regions” use semantic scene
graphs based on segmentation, but have different de-
scriptors for region nodes. “BRS regions” is the
proposed method that represents region nodes by a
1-hot vector in the discretized joint space of bear-
ing range semantics. “B-R-S regions” is an alterna-
tive method that first computes 1-hot vectors inde-
pendently in each of the three discretized spaces of
bearing, range, and semantics, and then concatenate
the three 1-hot vectors to obtain a 3-hot state vector
(“B-R-S regions”). “BRS image” differs from “BRS
regions” only in terms of graph topology, and uses a
single-node semantic scene graph with the entire im-
age as a graph node. From this table, we can see that
the proposed method, which describes the semantic
scene graph consisting of region nodes using 1-hot re-
gion descriptors of the BRS joint space, outperforms
the other methods.
We observe that the descriptor compactness is
quite important in the training phase because the re-
inforcement learning procedure iterates the classifi-
cation process for hundreds of thousands of times
through the training episodes. In our approach, suf-
ficiently compact scene descriptor was acquired by
the proposed approach, as shown bellow. The num-
ber of nodes per semantic scene graph was 7.2 on av-
erage. The node descriptor consumed 8-bit per node.
The space cost for nodes and edges were 57.8-bit and
12.5-bit per semantic scene graph, respectively, on
average. This a low space cost, even compared to
the most compact existing descriptors such as bag-
of-words. Notably, the current descriptors were not
compressed, i.e., they may be further compressed.
5 CONCLUDING REMARKS
In this paper, a new trainable framework for ac-
tive cross-domain self-localization by using the se-
mantic scene graph model is presented. In the pro-
posed framework, graph neural networks (GNNs) are
used in two ways. First, the GNN is trained as a
visual place classifier for passive single-view self-
localization in the fashion of self-supervised learning.
Second, the trained GNN is reused as a means of em-
bedding S2G into a fixed-length state vector, which is
then fed to the reinforcement learning module to train
the next-best-view planner. Experiments showed that
the proposed method is effective in both passive self-
localization and knowledge transfer from passive to
active self-localization. The proposed framework was
found to be robust to changes in both viewpoint and
appearance. In the future, we plan to clarify these ro-
bustness and limitations through further research us-
ing real robots as well as simulated environments.
REFERENCES
Bj, E., Johansen, T. A., et al. (2017). Redesign and analysis
of globally asymptotically stable bearing only slam.
In 2017 20th International Conference on Information
Fusion (Fusion), pages 1–8. IEEE.
Borzeshi, E. Z., Piccardi, M., Riesen, K., and Bunke,
H. (2013). Discriminative prototype selection meth-
ods for graph embedding. Pattern Recognition,
46(6):1648–1657.
Burgard, W., Fox, D., and Thrun, S. (1997). Active mobile
robot localization. In Proceedings of the Fifteenth In-
ternational Joint Conference on Artificial Intelligence,
IJCAI, pages 1346–1352. Morgan Kaufmann.
Cai, H., Zheng, V. W., and Chang, K. C.-C. (2018). A com-
prehensive survey of graph embedding: Problems,
techniques, and applications. IEEE Transactions on
Knowledge and Data Engineering, 30(9):1616–1637.
Carlevaris-Bianco, N., Ushani, A. K., and Eustice, R. M.
(2016). University of michigan north campus long-
term vision and lidar dataset. The International Jour-
nal of Robotics Research, 35(9):1023–1035.
Chaplot, D. S., Gandhi, D., Gupta, S., Gupta, A., and
Salakhutdinov, R. (2020). Learning to explore using
active neural SLAM. In 8th International Conference
on Learning Representations.
Chaplot, D. S., Parisotto, E., and Salakhutdinov, R. (2018).
Active neural localization. In 6th International Con-
ference on Learning Representations.
Chen, L.-C., Zhu, Y., Papandreou, G., Schroff, F., and
Adam, H. (2018). Encoder-decoder with atrous sepa-
rable convolution for semantic image segmentation. In
Proceedings of the European conference on computer
vision (ECCV), pages 801–818.
C´orcoles, A. D., Magesan, E., Srinivasan, S. J., Cross,
A. W., Steffen, M., Gambetta, J. M., and Chow, J. M.
(2015). Demonstration of a quantum error detection
code using a square lattice of four superconducting
qubits. Nature communications, 6(1):1–10.
Cormack, G. V., Clarke, C. L., and Buettcher, S. (2009).
Reciprocal rank fusion outperforms condorcet and in-
dividual rank learning methods. In Proceedings of
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
568

the 32nd international ACM SIGIR conference on
Research and development in information retrieval,
pages 758–759.
Cummins, M. and Newman, P. M. (2011). Appearance-
only SLAM at large scale with FAB-MAP 2.0. Int. J.
Robotics Res., 30(9):1100–1123.
Dellaert, F., Fox, D., Burgard, W., and Thrun, S. (1999).
Monte carlo localization for mobile robots. In 1999
International Conference on Robotics and Automation
(ICRA), volume 2, pages 1322–1328.
Feder, H. J. S., Leonard, J. J., and Smith, C. M.
(1999). Adaptive mobile robot navigation and map-
ping. The International Journal of Robotics Research,
18(7):650–668.
Garg, S., Fischer, T., and Milford, M. (2021). Where is
your place, visual place recognition? In Zhou, Z.-
H., editor, Proceedings of the Thirtieth International
Joint Conference on Artificial Intelligence, IJCAI-21,
pages 4416–4425. International Joint Conferences on
Artificial Intelligence Organization.
Gawel, A., Del Don, C., Siegwart, R., Nieto, J., and Cadena,
C. (2018). X-view: Graph-based semantic multi-view
localization. IEEE Robotics and Automation Letters,
3(3):1687–1694.
Gottipati, S. K., Seo, K., Bhatt, D., Mai, V., Murthy, K.,
and Paull, L. (2019). Deep active localization. IEEE
Robotics and Automation Letters, 4(4):4394–4401.
He, Y., Hu, T., and Zeng, D. (2019). Scan-flood fill(scaff):
An efficient automatic precise region filling algorithm
for complicated regions. In IEEE Conference on
Computer Vision and Pattern Recognition Workshops,
pages 761–769. Computer Vision Foundation / IEEE.
Kim, G., Park, B., and Kim, A. (2019). 1-day learning, 1-
year localization: Long-term lidar localization using
scan context image. IEEE Robotics and Automation
Letters, 4(2):1948–1955.
Kong, X., Yang, X., Zhai, G., Zhao, X., Zeng, X., Wang,
M., Liu, Y., Li, W., and Wen, F. (2020). Semantic
graph based place recognition for 3d point clouds. In
2020 IEEE/RSJ International Conference on Intelli-
gent Robots and Systems (IROS), pages 8216–8223.
IEEE.
Lowry, S. M., S¨underhauf, N., Newman, P., Leonard, J. J.,
Cox, D. D., Corke, P. I., and Milford, M. J. (2016).
Visual place recognition: A survey. IEEE Trans.
Robotics, 32(1):1–19.
Matejek, B., Haehn, D., Zhu, H., Wei, D., Parag, T., and
Pfister, H. (2019). Biologically-constrained graphs for
global connectomics reconstruction. In Proceedings
of the IEEE/CVF Conference on Computer Vision and
Pattern Recognition, pages 2089–2098.
Oliva, A. and Torralba, A. (2001). Modeling the shape
of the scene: A holistic representation of the spatial
envelope. International journal of computer vision,
42(3):145–175.
Ramezani, M., Tinchev, G., Iuganov, E., and Fallon, M.
(2020). Online lidar-slam for legged robots with ro-
bust registration and deep-learned loop closure. In
2020 IEEE International Conference on Robotics and
Automation (ICRA), pages 4158–4164. IEEE.
Ronneberger, O., Fischer, P., and Brox, T. (2015). U-
net: Convolutional networks for biomedical image
segmentation. In Medical Image Computing and
Computer-Assisted Intervention, volume 9351 of Lec-
ture Notes in Computer Science, pages 234–241.
Springer.
Shah, D. and Xie, Q. (2018). Q-learning with nearest neigh-
bors. In Advances in Neural Information Processing
Systems 31: Annual Conference on Neural Informa-
tion Processing Systems, pages 3115–3125.
Song, Y., Guan, M., Tay, W. P., Law, C. L., and Wen, C.
(2019). Uwb/lidar fusion for cooperative range-only
slam. In 2019 international conference on robotics
and automation (ICRA), pages 6568–6574. IEEE.
Tanaka, K. (2021). Active cross-domain self-localization
using pole-like landmarks. In 2021 IEEE Interna-
tional Conference on Mechatronics and Automation
(ICMA), pages 1188–1194.
Tommasi, T. and Caputo, B. (2013). Frustratingly easy nbnn
domain adaptation. In Proceedings of the IEEE Inter-
national Conference on Computer Vision, pages 897–
904.
Wang, M., Yu, L., Zheng, D., Gan, Q., Gai, Y., Ye, Z., Li,
M., Zhou, J., Huang, Q., Ma, C., Huang, Z., Guo, Q.,
Zhang, H., Lin, H., Zhao, J., Li, J., Smola, A. J., and
Zhang, Z. (2019). Deep graph library: Towards ef-
ficient and scalable deep learning on graphs. ICLR
Workshop on Representation Learning on Graphs and
Manifolds.
Wang, R., Zhang, T., Yu, T., Yan, J., and Yang, X. (2021).
Combinatorial learning of graph edit distance via dy-
namic embedding. In Proceedings of the IEEE/CVF
Conference on Computer Vision and Pattern Recogni-
tion, pages 5241–5250.
Zhang, X., Wang, L., and Su, Y. (2021). Visual place recog-
nition: A survey from deep learning perspective. Pat-
tern Recognition, 113:107760.
Classification and Embedding of Semantic Scene Graphs for Active Cross-Domain Self-Localization
569
