
Workforce Modelling with Experience Accumulation
Timo Lahteenmaa-Swerdlyk
1
, Franc¸ois-Alex Bourque
1
and Slawomir Wesolkowski
2
1
Centre for Operational Research and Analysis, Development Research and Defence Canada,
60 Moodie Drive, Ottawa, ON K1A 0K2, Canada
2
Royal Canadian Air Force, Department of National Defence, 101 Colonel By Drive, Ottawa, ON K1A 0K2, Canada
Keywords:
Discrete-Event Simulation, Mentoring, Population Dynamics, Population Model.
Abstract:
The purpose of this work is to investigate the population dynamics of on-the-job training in a military appli-
cation, a scenario where mentees enter the system to receive training under the supervision of mentors, before
becoming mentors themselves. This work builds on the two-level model which only considers the total mentee
(level 1) and mentor (level 2) populations. Accumulation of experience is used to denote training progression,
improving the tracking of mentees through their training. Two new models are considered: (1) A multi-stage
mentee training model, which sub-divides the training into stages the mentees must progress through, and
(2) A transport model, a limit case as the number of stages is increased to infinity, resulting in a continuous
training medium mentees progress through. These two models are investigated by solving their respective an-
alytical models. To verify system behaviours, analytical solutions are compared to discrete-event simulations.
1 INTRODUCTION
For military occupations, an important aspect of pro-
fessional development is on-the-job training. In the
Canadian context, this takes the form of a system-
atic progression where personnel go through various
phases: they enter the system as mentees (e.g., ap-
prentices) and receive training under the supervision
of mentors (e.g., journeymen or masters), before be-
coming mentors themselves and productive members
of the workforce (Schaffel et al., 2021). To reduce
personnel costs while ensuring a necessary workforce
size and readiness, careful planning and modelling
must be undertaken on these training systems.
Bastian and Hall review approaches used in mili-
tary workforce planning and modelling (Bastian and
Hall, 2020). Prime examples of population dynam-
ics modelling include differential equations (Boileau,
2012; Vincent and Okazawa, 2019), Markov decision
models (Zais and Zhang, 2015; Diener, 2018; Su-
vorova et al., 2019) and system dynamics (Forrester,
1965) which utilizes continuous stocks and flows as
well as feedback loops to examine how organizational
structure, policies and decisions interact. An exam-
ple of this last method was implemented to model
mentee-mentor dynamics for pilots (S
´
eguin, 2015).
Analysis of the composition of workforces as well
near-term projections of occupational requirements
also relied on statistical methods (Bryce and Hender-
son, 2020; Okazawa, 2020). Yet, the most common
approach is based on using discrete-event simulations
to track the progress of personnel through a military
training system (Novak et al., 2015; Henderson and
Bryce, 2019).
The military workforce population models usu-
ally capture only the upward rank flow due to pro-
motion, not the experience accumulation due to the
mentee-mentor dynamics. A notable exception is a
system dynamics model which considers trainee pi-
lots and experienced pilots who mentor the trainees
(S
´
eguin, 2015). In most of the research, the popu-
lation variables are continuous in order to generate
computationally-efficient models that are easier to use
on large populations. These models are less accurate
when studying occupations with small populations.
This work builds on the two-level mentor-mentee
model derived from the ubiquitous “predator-prey”
model (Swift, 2002), which considers the total mentee
and mentor populations over time (Schaffel et al.,
2021). However, in this mentor-mentee model, indi-
vidual mentees cannot be distinguished from one an-
other in the total pool of mentees and thus a mentee
with minimal experience or time training as a mentee
may upgrade at any time to a mentor. Therefore, some
mentees may become mentors after completing only
a small amount of on-the-job-training, which is not
Lahteenmaa-Swerdlyk, T., Bourque, F. and Wesolkowski, S.
Workforce Modelling with Experience Accumulation.
DOI: 10.5220/0011620400003396
In Proceedings of the 12th International Conference on Operations Research and Enterprise Systems (ICORES 2023), pages 27-37
ISBN: 978-989-758-627-9; ISSN: 2184-4372
Copyright
c
2023 by His Majesty the King in Right of Canada as represented by the Minister of National Defence and SCITEPRESS – Science and Technology Publications, Lda. Under
CC license (CC BY-NC-ND 4.0)
27

realistic. Furthermore, the training progression of in-
dividual mentees is unclear as they form an indistin-
guishable pool from one another. In a realistic sce-
nario, mentees would accumulate experience through
their training. Modelling this experience accumula-
tion process allows for the tracking of the training
of each mentee in the system. Therefore, we intro-
duce a new experience accumulation mechanism to
resolve the issues encountered with the previous two-
level model.
In this paper, two new models are devised based
on the two-level model by dividing the total mentee
population into multiple stages to bin the training pro-
gression of mentees. First, we introduce a multi-
stage mentee training model that bins the mentee
pool into a generalized discrete number of stages,
forming a system of multiple ordinary differential
equations (ODEs). Second, we devise a “transport”
model, which is the result of increasing the number of
stages to infinity, forming a partial differential equa-
tion (PDE). To verify the system dynamics of these
models, a discrete-event simulation (DES) of each
model is compared to their corresponding analytical
versions.
The remainder of this report is organized as fol-
lows. Section 2 gives an overview of the previously
introduced two-level model (Schaffel et al., 2021).
Next, Section 3 and Section 4 describe the multi-stage
and transport models respectively. In both instances, a
benchmark scenario is used to examine the analytical
solutions and corresponding DES’s are set up to ver-
ify the dynamics of each model. Section 5 compares
the analytical solutions of the three models discussed.
Finally, Section 6 concludes the paper.
2 TWO-LEVEL MODEL
In this section, the two-level mentor-mentee model
(Schaffel et al., 2021) is re-introduced. This model
considers the mentee and mentor populations to each
be a single pool of the corresponding type of person.
The previously described saturation effects (Schaffel
et al., 2021) are not considered, and the training ca-
pacity is assumed to be infinite. The analytical equa-
tions for this model are described in Section 2.1. In
Section 2.2, a DES of the model is set up. Finally in
Section 2.3, the model is investigated with a bench-
mark scenario, which will be used throughout the pa-
per.
2.1 Analytical Model
The two-level model for an infinite training capacity
is defined as (Schaffel et al., 2021),:
˙x = a −bx (1)
˙y = bx −cy (2)
where x and y denote the mentee and mentor popula-
tions respectively, a is the intake rate of mentees into
the system, b is the upgrade rate of mentees to men-
tors, and c is the attrition rate of mentors. A mentee
will take an average of 1/b time units to upgrade to
a mentor, and a mentor will stay in the system for an
average of 1/c time units before leaving. The intake,
upgrade, and attrition rates are assumed to be con-
stant over time. For the model, the rate of change for
the mentee population ( ˙x) is equal to the intake rate
of mentees (a) minus the upgrade rate of mentees to
mentors (bx), while the rate of change of the mentor
population ( ˙y) is equal to the upgrade rate (bx) minus
the attrition rate of mentors (cy). In this model, the
fraction of the mentee and mentor populations chosen
to be upgraded or attrited is assumed to be propor-
tional to their respective sizes.
Solving the ODEs, the analytical solution is
shown in Eqn. (3) and Eqn. (4). The mentee and men-
tor populations decay exponentially from their initial
populations (x
0
and y
0
) to the target populations (x
t
and y
t
) of x
t
= a/b and y
t
= a/c respectively as time
(t) increases since the upgrade and attrition rates are
positive and real values. The system decays to the
target populations regardless of the size of the initial
mentee and mentor populations.
x(t) =x
t
+ (x
0
−x
t
)e
−bt
(3)
y(t) =y
t
+
b
c −b
(x
0
−x
t
)e
−bt
(4)
+
y
0
−
b
c −b
(x
0
−y
t
)
e
−ct
(5)
A drawback of this model is its inability to track
the progress of every mentee in the system (Schaffel
et al., 2021). The model only consists of two pools
for the mentees and mentors respectively. Once a
mentee is added into the mentee pool, it becomes in-
distinguishable from the other mentees in the system.
Since mentees cannot be distinguished from one an-
other and a constant proportion of the mentee pool is
always selected to upgrade, a mentee can be expected
to upgrade at any time. For example, a mentee could
be selected to upgrade after being added very recently,
staying in the mentee pool for a very small amount of
time, or a mentee could remain in the mentee pool
for a very large amount of time if it is never part
ICORES 2023 - 12th International Conference on Operations Research and Enterprise Systems
28

of the proportion of the population selected to up-
grade. Therefore, while the average training time for a
mentee is 1/b time units, a mentee can take anywhere
from zero to an infinite amount of time to upgrade,
which is not realistic. Since a mentee may upgrade at
any time, there is no clear training progression for the
mentees to follow.
2.2 Discrete-Event Simulation
To verify the analytical equations, a DES of the two-
level model was set up. A Discrete-Event Simulation
permits the tracking of each mentee and mentor in the
system allowing for control and observance over the
simulation process and output. At each event within
the simulation, defined processes may be triggered to
occur for a mentee or mentor, such as an addition or
attrition from the system, or an upgrade of a mentee
to a mentor.
To set up the simulation, mentees and mentors
were assigned a training time and a time to attrit,
randomly given from exponential probability distribu-
tions with means of 1/b and 1/c respectively (Schaf-
fel et al., 2021). A mentee would enter the system and
remain as a mentee for their assigned training time.
They would then upgrade to a mentor and further re-
main in the system for their assigned time until they
leave via attrition.
Another consideration of implementing a DES is
the handling of whole mentee and mentor popula-
tions instead of the continuously-variable populations
present in the analytical model. This is particularly
important when determining the intake procedure of
mentees into the system. In the analytical model, the
intake is a constant function over time (a). However,
this is not possible in a DES since individual mentees
(i.e., not fractions of a mentee) need to enter the sys-
tem at discrete points in time. Therefore, to replicate
the constant intake of the analytical model, the time
interval between when mentees enter the system was
randomly chosen, given by an exponential distribu-
tion with a mean of a (Schaffel et al., 2021). In the
current implementation, a mentee may enter the sys-
tem at any time while still maintaining the average
intake rate of a mentees per time unit.
Of note, because all holding and inter-arrival times
are exponentially distributed, this simulation models
a continuous-time Markov chain.
2.3 Results for a Benchmark Scenario
In the chosen benchmark scenario, the mentee and
mentor populations undergo a growth where their
populations are doubled. Transitioning from an initial
state (x
0
,y
0
) to a target steady state (x
t
,y
t
), the input
parameters are fixed to the following values:
(x
0
,y
0
) = (25,100)
(x
t
,y
t
) = (50,200)
c = 0.05
The intake (a), upgrade (b) and attrition (c) rates are
assumed to be fixed and not vary over time. There-
fore, a and b are calculated to reach the target popu-
lations:
a = cy
t
= 10
b =
a
x
t
= 0.2
From the defined values, the system will transition
from initial mentee and mentor populations of 25 and
100 respectively, to target populations of 50 and 200.
To reach this target, 10 mentees must enter the sys-
tem on average each time unit, and each mentee will
require an average of 5 time units of training before
upgrading to a mentor. Finally, a mentor will stay in
the system for an average of 20 time units before ex-
iting the system.
Fig. 1 shows the statistics for the mentee (blue,
bottom curve) and mentor (green, top curve) popula-
tions from the DES model for 1000 experiments. The
mean of the two populations is given by the dashed
line, and the shaded region gives two standard devi-
ations of the results. The analytical solution is also
plotted with the benchmark scenario. The two popula-
tions begin at their initial values of 25 and 100 respec-
tively and decay exponentially to their final values of
50 and 200. The analytical solution and the simulated
mean of the two populations lie on top of each other
for all time and are within two standard deviations of
the simulated results. The standard error near steady
state was found to be around 0.225 and 0.45 for the
mentee and mentor populations respectively. Since
the discrete model is a Poisson point process, the ex-
pected standard errors are
√
c and
√
b for the mentee
and mentor populations, which are roughly equal to
the values observed. Given this, we are confident the
discrete model is set up correctly and is producing ac-
curate results.
3 MULTI-STAGE MENTEE
TRAINING MODEL
In Section 2.1, it was noted that there is a lack of
training progression in the two-level model since the
mentees form an indistinguishable pool and may up-
grade at any time. In an attempt to resolve this issue,
Workforce Modelling with Experience Accumulation
29
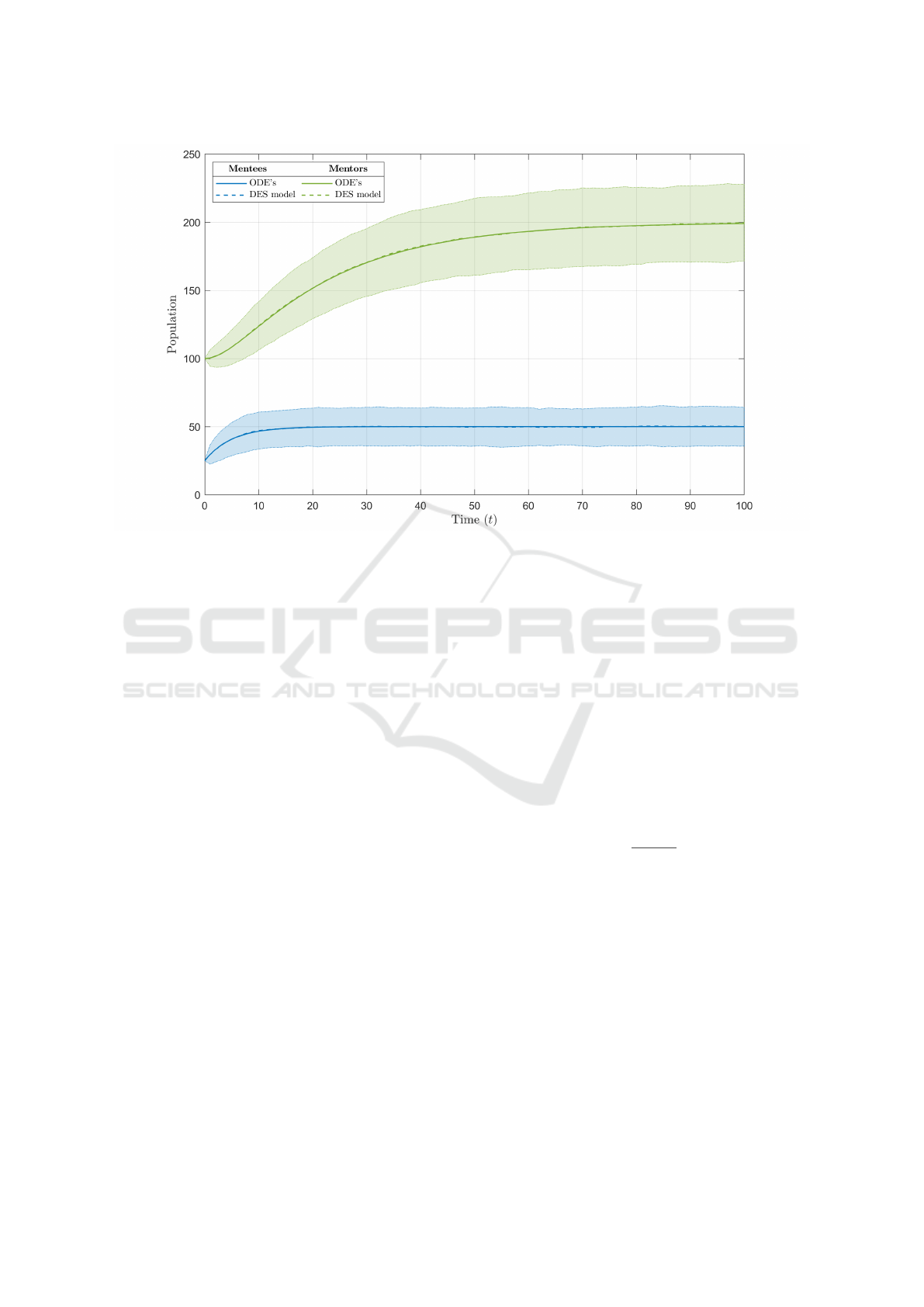
Figure 1: Analytical and DES implementations of the two-level model over time with the benchmark scenario.
the model was modified to split the mentee progres-
sion into multiple stages, which a mentee must pass
through to upgrade to a mentor. In this section, the
multi-stage mentee training model is introduced and
discussed. In Section 3.1, the analytical equations
for the multi-stage model are introduced, and in Sec-
tion 3.2, a DES implementation of the model is set
up. The results with the benchmark scenario are then
investigated in Section 3.3 for two scenarios: A five-
stage system and a 25-stage system.
3.1 Analytical Model
The system of equations for the multi-stage mentee
training model is shown as follows:
˙x
1
= a −bnx
1
˙x
2
= bn(x
1
−x
2
)
.
.
.
˙x
n
= bn(x
n−1
−x
n
)
˙y = bnx
n
−cy
(6)
where n denotes the number of mentee stages be-
fore upgrading to a mentor; and x
1
,x
2
,··· , x
n
de-
note the mentee populations at each training stage
over time. In practical terms, the number of stages
is generally determined experimentally with a higher
number allowing us to model mentee training stages
with increasing granularity. The upgrade rate for
each mentee stage is proportional to the number of
stages in the system (nb) so that the total training time
through all the stages averages to 1/b. Like for the
two-level model, the fraction of the mentee popula-
tion chosen to upgrade from each stage is assumed to
be proportional to its total size. The mentor equation
remains the same as for the two-level model where its
rate of change is given by the difference in the men-
tors attrited and the mentees upgraded from the final
stage. Finally, we will assume that the initial mentee
populations are evenly distributed between the stages.
Therefore, each stage will have an initial population
of x
0
/n.
The solution of the multi-stage analytical model is
as follows:
x(t) = e
−nbt
n
∑
j=1
c
1j
j
∑
i=1
t
j−i
( j −i)!
v
1i
+ e
−ct
c
2
v
2
+ x
p
(7)
The solution, x(t), is a column vector containing the
populations over time of the individual mentee stages
and the mentor population:
x(t) =
x
1
(t)
x
2
(t)
.
.
.
x
n
(t)
y(t)
(8)
The solution contains one degenerate eigenvalue,
−nb, with a multiplicity of n, a second distinct eigen-
value, −c, and a constant particular solution, x
p
. The
ICORES 2023 - 12th International Conference on Operations Research and Enterprise Systems
30

particular solution is the following column vector de-
noting the steady state values of each population:
x
p
=
a
nb
.
.
.
a
nb
a
c
(9)
For the generalized eigenvectors of the degener-
ate eigenvalue, v
1i
, of length n + 1, its elements
(v
1i,1
,v
1i,2
,··· , v
1i,n+1
) are all zero except for the fol-
lowing:
v
1i,n−i+1
=
c −nb
(nb)
i
v
1i,n+1
=
1
(nb −c)
i−1
,
The eigenvector corresponding to the distinct eigen-
value of length n + 1 (the mentor solution) has the
following form:
v
2
=
0
.
.
.
0
1
(10)
Finally, the constants in the solution have the follow-
ing values:
c
1j
=
x
0
−x
t
n
(nb)
j
c −nb
(11)
c
2
= y
0
−y
t
−
n
∑
j=1
c
1j
(nb −c)
j−1
(12)
3.2 Discrete-Event Simulation
To set up a DES implementation of the multi-stage
mentee training model, the two-level discrete model
from Section 2.2 was modified so that the training for
a mentee was repeated n times to replicate the pro-
gression through each stage. For each repetition, a
mentee was assigned a training time given randomly
by an exponential probability distribution with a mod-
ified mean of 1/nb. A mentee would enter the sys-
tem and remain in the first stage for their first as-
signed training period before upgrading to the second
stage. This process would repeat n times, simulating
a progression through each stage, until the mentee up-
graded to a mentor. Even with this modification, the
overall simulation remains markovian.
One consideration faced with implementing a
DES was the handling of whole mentee populations to
determine the initial number of mentees at each stage.
For example, in a system with 10 mentee stages and
25 initial mentees, each stage would need to be pop-
ulated with 2.5 mentees to have an even distribution.
This is possible in the analytical model as the mentee
and mentor populations are continuous; however, this
cannot be done in a discrete implementation. To solve
this issue, the number of initial mentees at each stage
was randomly drawn from a discrete uniform distri-
bution with values between 1 to n. Therefore, given
enough experiments, the average distribution of initial
mentees should be even across all of the stages.
3.3 Results for the Benchmark Scenario
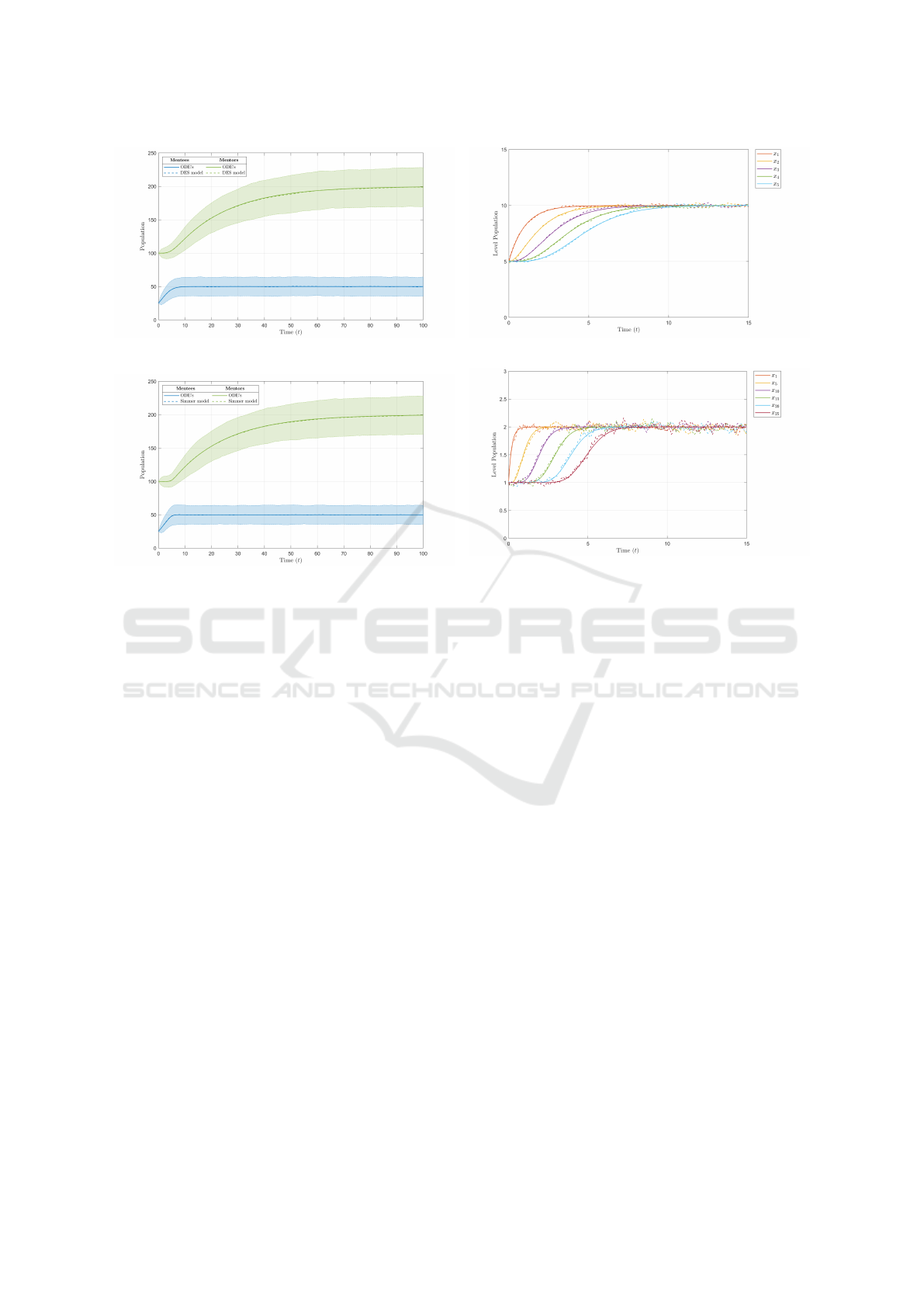
Fig. 2 shows the statistics for systems with 5 and 25
stages over time with the benchmark scenario. In both
cases, their respective DES simulations were run for
1000 experiments. Fig. 2a and Fig. 2c show their total
mentee and mentor populations over time. The mean
of the two populations is given by the dashed line,
and the shaded region gives two standard deviations
of the results. Fig. 2b and Fig. 2d show the population
of each stage over time with the dashed line indicat-
ing the mean. For all plots, their respective analytical
solutions are also plotted as solid lines in the same
colour.
From Fig. 2a, the mentee and mentor populations
are set initially at 25 and 100 respectively, and de-
cay exponentially to their target populations of 50
and 200. Compared to the two-level solution given in
Fig. 1, the mentee population for five training stages
decays quicker to steady state. Furthermore, the lower
number of mentees upgraded each time causes the
mentor population to spend more time near its ini-
tial population before beginning its exponential de-
cay. From Fig. 2b, each stage begins at its initial pop-
ulation of five mentees, then decays exponentially to
the same steady state populations of 10. It was ob-
served that each stage acts on the behaviour of the
previous stage: Stage 1 decays first, then Stage 2, up
to Stage 5 which decays to steady state last. This was
interpreted as a progression of mentees through the
training stages: Mentees entering the system enter at
stage 1 first, undergo training then upgrade to stage 2,
which gives an increase in the population of the sec-
ond stage. These mentees undergo training and up-
grade to stage 3, giving a population increase in stage
3. This process continues up the stages and into the
mentor population as mentees progress through the
system.
From Fig. 2d, each training stage begins at its
initial population of one mentee and decays expo-
nentially to the same steady state populations of two
mentees. Similar to a system with five stages, given
in Fig. 2b, each stage begins its decay in subsequent
order. However, the solutions decay to steady state
at a quicker rate and are much more bunched up in
Workforce Modelling with Experience Accumulation
31
(a) Total mentee and mentor populations for five stages.
(b) Individual training stage populations for five stages.
(c) Total mentee and mentor populations for 25 stages.
(d) Individual training stage populations for selected stages
for 25 stages.
Figure 2: Analytical and DES implementations of the multi-stage model over time with the benchmark scenario. Total mentee
and mentor populations for (a) five stages; and (c) for 25 stages; and corresponding individual training stage populations for
(b) five stages; and (d) a sub-set of 25 stages.
time. This translates to the total populations given in
Fig. 2c, in which the decay to steady state for the to-
tal mentee population is also increased. The solutions
are more bunched up since the average time to steady
state for the total mentee population must still be 1/b
time units.
For all plots, the analytical solutions and the simu-
lated means of the populations lie on top of each other
and are within two standard deviations of the simu-
lated results. The standard error for the total popula-
tions near steady state was also identical to the val-
ues from the two-level model (0.225 and 0.45 for the
mentee and mentor populations respectively). The
standard error for the individual stages near steady
state was found to be around 0.1 and 0.045 for the
five- and 25- stage models respectively. These are
commensurate to the standard error of the total popu-
lation. Given this, we are confident the discrete mod-
els are set up correctly and are producing accurate re-
sults. Finally, it was noted that the population mean
of the individual mentee stages became noisier as the
number of stages is increased. This is believed to re-
sult from an amplification of the discrete effects of
the model since the population size for the individual
stages decreases as more stages are added.
Overall, an improvement was observed over the
two-level model, in which there is now some form
of progression as mentees must pass through several
trackable stages. However, a similar drawback as the
two-level model is still present: The same proportion
of each stage is always selected to upgrade (nb), so a
mentee could be selected to upgrade to the next stage
at any time.
4 LIMIT CASE: TRANSPORT
MODEL
From Section 3.3, it was noted that a multi-stage
model showed some form of workforce progression
as mentees must pass through several stages of train-
ing before upgrading to mentors. However, each stage
suffered from the same issues as the two-level model,
as the mentees in each stage still could not be tracked
and may upgrade at any time. Therefore, in an at-
tempt to obtain the smallest interval of training which
could be tracked, the number of stages was increased
to infinity, yielding a transport model. In this section,
this transport model is investigated and discussed. In
ICORES 2023 - 12th International Conference on Operations Research and Enterprise Systems
32

Section 4.1, the analytical equations for the transport
model are introduced, and in Section 4.2, a discrete
implementation of the model is set up. In Section 4.3,
the model is investigated with the benchmark sce-
nario.
4.1 Analytical Model
Two key issues arose when deriving the transport
model: (a) For an infinite number of stages, each stage
must contain zero mentees on average to avoid a pop-
ulation of infinity, and (b) Each mentee requires an
average upgrade time of zero time units through each
stage to avoid having an infinite training time. To
solve these issues, the stages were redefined a contin-
uous medium (l) and assigned an arbitrary total length
of one. For the new training regime, a mentee enters
the system at l = 0 and begins flowing through the
medium undergoing training. Once a mentee reaches
l = 1, they upgrade to a mentor. The variable of
interest was also changed to the density of mentees
throughout the medium (u), which is more appropri-
ate for a continuous medium. The mentor equation
was modified to accommodate the use of density (u)
instead of a population size (x): the rate of change of
the mentor population is given by the difference in the
mentors’ attrition and the mentees exiting the medium
at l = 1.
The system of equations for the transport model is
defined as:
∂
t
u(l,t) = −b∂
l
u(l,t) (13)
˙y = bu(1,t)−cy. (14)
The PDE for the mentee population was derived from
the multi-stage model, Eqn. (6).
For the initial condition of the PDE (u
i
), it was as-
sumed that the initial mentee density was evenly dis-
tributed throughout the medium. For the boundary
condition (u
f
), the density is fixed to the ratio between
the intake rate (a) and the progression rate through the
medium (b) as given by:
u
f
=
a
b
. (15)
The boundary condition is assumed to turn on after
t = 0, preventing a conflict with the initial condition.
From (Novozhilov, 2020; Ko, 2020), the solution
of the transport PDE is given by the piecewise func-
tion:
u(l,t) =
(
u
i
if t ≤
l
b
u
f
if t >
l
b
.
(16)
The density across the medium begins at the initial
density (u
i
) and jumps up to the final density (u
f
) at
the contour: l = bt.
To determine the analytical solutions for the total
mentee and mentor populations, the mentee solution
given in Eqn. (16) was rewritten using a Heaviside
step function:
u(l,t) = u
i
+ (u
f
−u
i
)H
t −
l
b
, (17)
where H denotes the left-continuous Heaviside step
function, H(0) = 0. Using this representation, the
total mentee population was found by integrating
the mentee density across the medium, given by:
Eqn. (18).
x(t) = u
i
−b(u
f
−u
i
)
R
t −
l
b
−t
, (18)
where R denotes the ramp function. The solution
for the mentor population was found by substituting
Eqn. (17) into Eqn. (14) and solving the resulting
ODE. The equation for the mentor population is thus
given by:
y(t) = y
i
e
−ct
+
bu
i
c
1 −e
−ct
−
b
c
e
−ct
(u
f
−u
i
)
e
c
b
−e
ct
H
t −
1
b
. (19)
4.2 Discrete-Event Simulation
To set up a DES implementation of the transport
model, the two-level discrete model from Section 2.2
was modified so that the training time for the mentees
is constant at 1/b instead of being drawn from an ex-
ponential distribution. This feature makes the simula-
tion non-markovian. To mimic an even distribution of
initial mentees throughout the medium (l), the initial
mentees were assigned a uniformly-distributed train-
ing time between zero and 1/b. This method repli-
cates the analytical system since all mentees progress
through the medium at a constant rate (b); therefore,
the initial position of a mentee along the medium was
inversely proportional to their training time.
4.3 Results for the Benchmark Scenario
To utilize the benchmark scenario with the transport
model, the initial and boundary conditions were fixed
to the following values:
u
i
= 25
u
f
= 50.
With these definitions, the total mentee population,
found by integrating the mentee density over the
medium, still has an initial population of 25 mentees
and a final population of 50.
Workforce Modelling with Experience Accumulation
33

For the DES, the density of mentees must be cal-
culated from the mentees present in the system over
time and their respective progression through their
training. Since mentees progress through the medium
at a constant rate, the location of a mentee in the
medium at a point in time can be inferred from their
training time (initial mentees) or arrival time into the
system (added mentees). To generate a surface plot
of mentee densities, mentees were binned together in
time and medium intervals. The bin in time was cho-
sen to be an interval of 1/12 time units, potentially
simulating a progression through the medium once
every month. The bin in the medium was chosen to be
1/60, matching the time interval so a mentee would
progress forward by one bin in the medium every time
interval.
4.3.1 Surface Solution of the Mentee Population
Across the Medium
Fig. 3 shows the surface plot of densities for the an-
alytical PDE and DES with the benchmark scenario.
The simulation was run for 1000 experiments. From
the analytical solution, Fig. 3a and Fig. 3b, the den-
sity of mentees through the medium jumps from 25 to
50 after the contour l = bt. After 5 (1/b) time units,
the entire medium is populated at the final density.
From (Novozhilov, 2020; Ko, 2020), the trans-
port PDE models a constant progression through the
medium at a rate of b. This gives straight-line con-
tours with a slope of b, as seen from the top-down
view in Fig. 3b. Therefore, in the transport model
each mentee has the same training time of 1/b. This
is different from the two-level and multi-stage models
given in Section 2 and Section 3, in which the training
time for mentees was exponentially distributed. This
constant training time between the mentees arises be-
cause as the number of stages is increased to infinity
(n → ∞), the average time a mentee spends in each
stage approaches zero. For an average time of zero
in each stage, there must be no variance between the
training times for each mentee in the system, giving
the same training time for each. Finally, the loca-
tion of a mentee along the medium denotes how far
along they have progressed with their training. This
improves the tracking of mentees through their train-
ing as now a continuous medium is used to denote
their progression.
For the simulation output, Fig. 3c and Fig. 3d,
the initial density of mentees across the medium is
even around 25, and the final density is even around
50. The surface plot also demonstrates nearly identi-
cal behaviour to the analytical solution, in which the
spike in density up to 50 occurs along the contour:
l = bt. From the top-down view, mentees progress
through the medium at a constant rate of b, like in
the analytical model. Given the similarities observed
between the analytical and discrete outputs, it is be-
lieved that the two versions of the transport model are
equivalent.
4.3.2 Solution of the Total Mentee and Mentor
Populations
The solutions for the total mentee and mentor pop-
ulations for the benchmark scenario are plotted in
Fig. 4. The analytical solutions given by Eqn. (18)
and Eqn. (19) are plotted as solid lines. The statistics
of the total populations from the DES model are also
plotted. The mean of the two populations is given
by the dashed line, and the shaded region gives two
standard deviations of the results. The mentee pop-
ulation linearly increases from the initial population
of 25 mentees to the final population of 50. After 5
(1/b) time units, all initial mentees have upgraded to
mentors and the mentees now populate the system at
the final density. Therefore, the mentee population
reaches steady state at this time. The mentor popula-
tion still undergoes its exponential decay at a rate of c.
However, the decay only begins once the mentee pop-
ulation reaches steady state and the incoming mentors
are at the final density. The analytical solution and the
mean of the simulation results of the two populations
lie on top of each other, are within two standard de-
viations of the simulated results, and their standard
errors were found to be identical to the values from
the previous models (0.225 and 0.45 for the mentee
and mentor populations respectively). This gives fur-
ther confirmation that the two versions of the transport
model are equivalent and the discrete model was set
up correctly.
5 COMPARISON BETWEEN THE
THREE MODELS
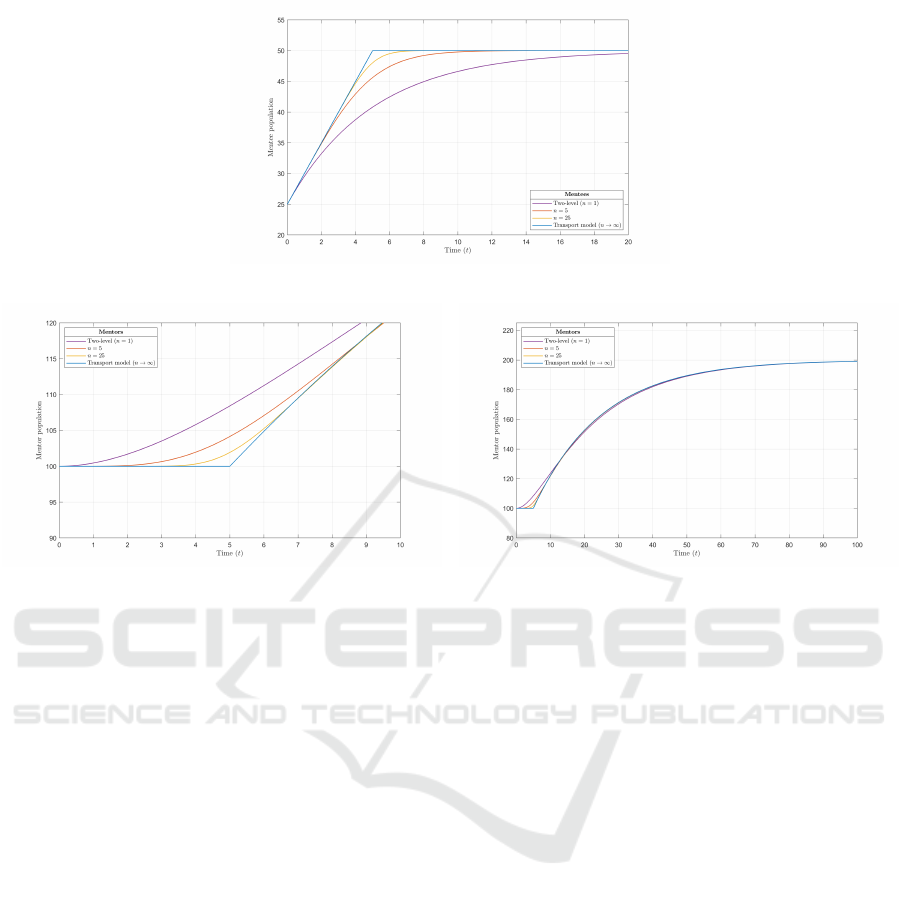
Fig. 5 shows the analytical solutions of the two-level
(one mentee stage), five- and 25- mentee stage, and
transport models plotted together with the benchmark
scenario for comparison.
From Fig. 5a, as the number of mentee stages is
increased, the decay rate of the final population in-
creases. The transport model, shown in blue, is the
limit case, in which there is an infinite decay rate and
simply reaches the final population at 5 (1/b) time
units. From Fig. 5b, the exponential rise into the de-
cay to steady state for the mentor population also be-
comes sharper as the number of stages is increased.
Due to the varying sharpness in the rise, all solutions
ICORES 2023 - 12th International Conference on Operations Research and Enterprise Systems
34
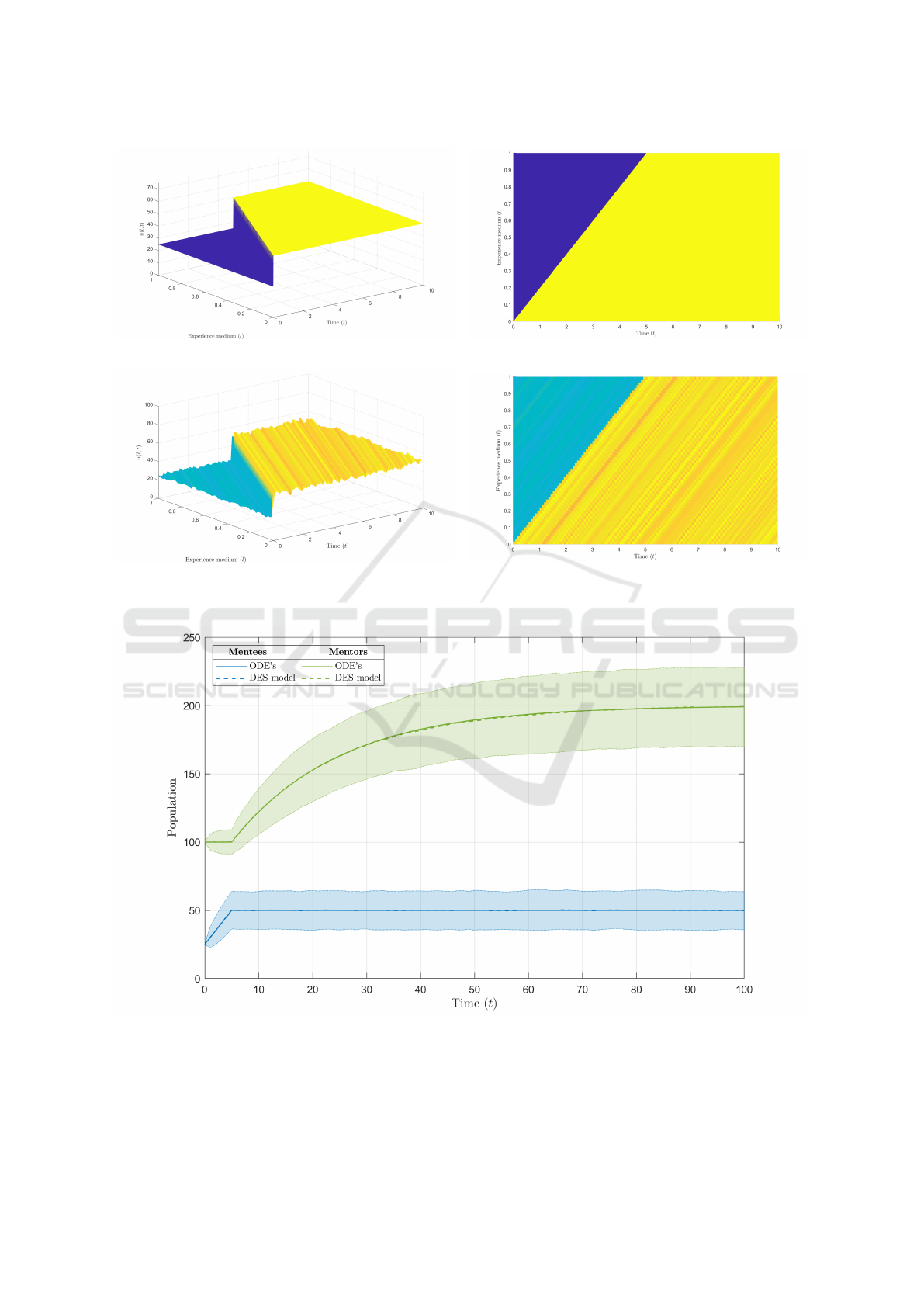
(a) 3-D view, analytical PDE.
(b) Top-down view, analytical PDE.
(c) 3-D view, discrete simulation.
(d) Top-down view, discrete simulation.
Figure 3: Surface plot of analytical and DES densities of the transport model.
Figure 4: Mentee and mentor populations over time for analytical and DES implementations of the transport model with the
benchmark scenario.
cross over each other as they decay to steady state at
the final population of 200 mentors. From Fig. 5b at
20 time units, the two-level model, shown in purple,
has the lowest mentor population and is the furthest
from the steady state value, while the transport model
has the highest population and is the closest to the
Workforce Modelling with Experience Accumulation
35
(a) Mentee population.
(b) Mentor population, zoomed in. (c) Mentor population, full decay.
Figure 5: Comparison of the analytical solutions of the two-level (one mentee stage), multi-stage (five and 25 mentee stages),
and transport models.
steady state value. Therefore, while all solutions have
the same decay rate (c) and a time to steady state of
infinity, if a threshold value is used to denote the sys-
tem is at steady state, the transport model will always
have the quickest time to steady state, and the two-
level model will always be the slowest.
6 CONCLUSION
In this paper, the workforce population dynamics of
on-the-job training was investigated, building upon a
two-level model of the system given in (Schaffel et al.,
2021). In an effort to obtain a more realistic model,
two types of experiments were investigated: A multi-
stage model and a transport model. The analytical
solutions of these three models were investigated us-
ing a benchmark scenario in which the mentee and
mentor populations were doubled. The analytical so-
lutions and the model behaviours were verified using
a DES.
A drawback of the two-level model is that the
mentees are grouped in a pool and are indistinguish-
able from one another. A mentee could be expected to
upgrade to a mentor at any time, which is not realis-
tic and resulted in a lack of clear training progression
for each mentee. For the multi-stage model, some
training progression was observed as the population
of the individual stages changed over time. However,
each stages still suffered from the same issues as the
two-level model. The transport model was the limit
case of the multi-stage model as the number of stages
was increased to infinity, in an attempt to track the
smallest portion of the mentee population which was
possible. In this system, all mentees had a constant
training rate. The tracking of mentees through their
training was greatly improved since their progression
was now represented by a continuous medium.
The transport model is essentially a pair of queues
in parallel where: (1) the mentee queue has a constant
service time to simulate a constant training rate, and
(2) the mentor queue has an exponentially distributed
service time to model attrition. This solves several is-
sues contained in the other two models: the mentees
in the transport model are much easier to track since
they will all progress through the medium at the same
rate, and only depart the mentee population once the
full medium is crossed, leading to a constant training
time. However, the equal training time and progres-
sion for all mentees in the system may not be realis-
tic. The mentor population is also still represented by
ICORES 2023 - 12th International Conference on Operations Research and Enterprise Systems
36

the same equation as the two-level model, which may
not be an accurate representation of a realistic sce-
nario when combined with the PDE for the mentee
population. Despite these issues, the formulation of
a transport model for the training scenario provides
a more flexible and less complicated means of mod-
elling the progression of mentees to mentors than the
multi-stage model. This may aid in building up and
investigating more realistic workforce system imple-
mentations in the future. It is believed that a transport
model could be used as a limit case for more compli-
cated models of population dynamics allowing for a
quick verification of their dynamic behaviour as well
as quick-turnaround tools to help plan workforce tran-
sitions.
REFERENCES
Bastian, N. D. and Hall, A. O. (2020). Military workforce
planning and manpower modeling. In Scala, N. M.
and Howard, J. P., editors, Handbook of Military and
Defense Operations Research. CRC Press, 1st edition.
Boileau, M. L. A. (2012). Workforce modelling tools used
by the canadian forces. pages 18–23.
Bryce, R. and Henderson, J. (2020). Workforce popula-
tions: Empirical versus markovian dynamics. In 2020
Winter Simulation Conference (WSC), pages 1983–
1993.
Diener, R. (2018). A solvable model of hierarchical work-
forces employed by the canadian armed forces. Mili-
tary Operations Research, 23:47–57.
Forrester, J. (1965). Industrial Dynamics. System dynamics
series. Pegasus Communications.
Henderson, J. and Bryce, R. (2019). Verification methodol-
ogy for discrete event simulation models of personnel
in the canadian armed forces. In 2019 Winter Simula-
tion Conference (WSC), pages 2479–2490.
Ko, J. (2020). The transport equation. https://www.math.
toronto.edu/jko/APM346 summary 2 2020.pdf.
Novak, A., Tracey, L., Nguyen, V., Johnstone, M., Le, V.,
and Creighton, D. (2015). Evaluation of tender solu-
tions for aviation training using discrete event simu-
lation and best performance criteria. In 2015 Winter
Simulation Conference (WSC), pages 2680–2691.
Novozhilov, A. (2020). The linear transport equation.
https://www.ndsu.edu/pubweb/
∼
novozhil/Teaching/
483%20Data/02.pdf.
Okazawa, S. (2020). Methods for estimating incidence rates
and predicting incident numbers in military popula-
tions. In 2020 Winter Simulation Conference (WSC),
pages 1994–2005.
Schaffel, S., Bourque, F.-A., and Wesolkowski, S. (2021).
Modelling the mentee-mentor population dynamics:
Continuous and discrete approaches. In 2021 Winter
Simulation Conference (WSC), pages 1–10.
S
´
eguin, R. (2015). Parsim, a simulation model of the royal
canadian air force (rcaf) pilot occupation - an assess-
ment of the pilot occupation sustainability under high
student production and reduced flying rates. In Pro-
ceedings of the 4th International Conference on Op-
eratinal Reserach and Enterprise Systems (ICORES).
Suvorova, S., Novak, A., Moran, B., and Caelli, T. (2019).
The use of markov decision processes for australian
naval aviation training schedules. Military Operations
Research, 24(2):31–46.
Swift, R. J. (2002). A stochastic predator-prey model. In
Bulletin of the Irish Mathematical Society, number 48.
Irish Mathematical Society.
Vincent, E. and Okazawa, S. (2019). Determining equilib-
rium staffing flows in the canadian department of na-
tional defence public servant workforce. In 2019 In-
ternational Conference on Operations Research and
Enterprise Systems (ICORES), pages 205–212.
Zais, M. and Zhang, D. (2015). A markov chain model of
military personnel dynamics. International Journal of
Production Research, 54:1–23.
Workforce Modelling with Experience Accumulation
37
