
Towards Audit Requirements for AI-Based Systems in Mobility
Applications
Devi Padmavathi Alagarswamy
1
, Christian Berghoff
2
, Vasilios Danos
3
, Fabian Langer
3
,
Thora Markert
3,∗
, Georg Schneider
4
, Arndt von Twickel
2
and Fabian Woitschek
4,∗
1
ZF Friedrichshafen AG, System House Autonomous Mobility Systems, Friedrichshafen, Germany
2
German Federal Office for Information Security (BSI), Bonn, Germany
3
T
¨
UV Informationstechnik GmbH, IT Security Hardware Evaluation, Essen, Germany
4
ZF Friedrichshafen AG, Artificial Intelligence Lab, Saarbr
¨
ucken, Germany
Keywords:
Artificial Intelligence, Neural Networks, Security, Safety, Trustworthiness, Regulation, AD, ADAS.
Abstract:
Various mobility applications like advanced driver assistance systems increasingly utilize artificial intelligence
(AI) based functionalities. Typically, deep neural networks (DNNs) are used as these provide the best perfor-
mance on the challenging perception, prediction or planning tasks that occur in real driving environments.
However, current regulations like UNECE R 155 or ISO 26262 do not consider AI-related aspects and are
only applied to traditional algorithm-based systems. The non-existence of AI-specific standards or norms pre-
vents the practical application and can harm the trust level of users. Hence, it is important to extend existing
standardization for security and safety to consider AI-specific challenges and requirements. To take a step
towards a suitable regulation we propose 50 technical requirements or best practices that extend existing reg-
ulations and address the concrete needs for DNN-based systems. We show the applicability, usefulness and
meaningfulness of the proposed requirements by performing an exemplary audit of a DNN-based traffic sign
recognition system using three of the proposed requirements.
1 INTRODUCTION
Artificial intelligence (AI) -based systems are increas-
ingly used as part of mobility applications like au-
tonomous driving (AD) or advanced driver assistance
systems (ADAS). Especially, deep neural networks
(DNNs) achieve an impressive performance on most
tasks and are the most promising solution to achieve
higher levels of automated driving. At the same time,
different manufacturers already use DNN-based solu-
tions as part of ADASs with partial automation (SAE
L2 (SAE J3016, 2014)) (Karpathy, 2021) that are op-
erating on public roads or for highly automated shut-
tles (SAE L4) (Waymo, 2021) operating in limited
public areas. However, current DNNs introduce new
and specific vulnerabilities into the systems which
can impact the performance and trustworthiness of
AD/ADAS systems negatively. This requires a de-
tailed analysis of existing vulnerabilities and poten-
tial mitigation strategies. To still enable the usage of
such DNN-based solutions for high-risk applications,
∗
Main Contribution.
like highly or fully automated driving (SAE L4/L5),
clear guidelines and regulations are required. This as-
sures that systems with a high degree of autonomy are
trustworthy with respect to use case relevant aspects
like safety, security, robustness or explainability and
include mitigation strategies to known vulnerabilities.
However, currently no homologation regulations
or standards exist that are tailored towards the use
of AI-based systems in mobility applications and in-
clude AI-specific vulnerabilities (Radlak et al., 2020).
There are no uniformly acknowledged principles and
practices that the development, testing or deployment
of AI-based systems must fulfill. This limits the fu-
ture deployment of AI-based systems to low-risk ap-
plications. Furthermore, it represents a major chal-
lenge for industry, auditors and regulators and poten-
tially leads to a lower level of user trust.
To provide guidance for future regulations, in this
work we explore how auditing guidelines can ensure
the security and safety of AI-based systems in high-
risk applications. Thereby, we focus on the appli-
cation of AI-based systems for mobility applications
Alagarswamy, D., Berghoff, C., Danos, V., Langer, F., Markert, T., Schneider, G., von Twickel, A. and Woitschek, F.
Towards Audit Requirements for AI-Based Systems in Mobility Applications.
DOI: 10.5220/0011619500003405
In Proceedings of the 9th International Conference on Information Systems Security and Privacy (ICISSP 2023), pages 339-348
ISBN: 978-989-758-624-8; ISSN: 2184-4356
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
339

like functionalities for AD/ADAS. Hence, we base
our work on existing standards for road vehicles, like
the functional safety standard ISO 26262 (ISO 26262,
2018), which are relevant for mobility applications,
and provide the following contributions:
• We present an overview of existing and develop-
ing standards relevant for auditing AI-based sys-
tems in mobility applications.
• We introduce a list of generic requirements which
focus on specific needs arising when auditing AI-
based systems.
• We compare different use cases for AI-based sys-
tems in mobility applications to select the most
suitable use case which is used for testing and re-
fining the introduced audit requirements in prac-
tice.
• We demonstrate the applicability of the most rele-
vant audit requirements for the selected use case.
2 RELATED WORK
During an audit the compliance to industry stan-
dards mandated by regulators is evaluated. How-
ever, traditional standards for systems in mobility ap-
plications do not contain specific guidelines in case
AI-based systems are utilized instead of traditional
algorithm-based systems. This includes both safety
standards like (ISO 26262, 2018), (ISO 21448, 2022)
or (ANSI/UL 4600, 2022) and security standards like
(ISO/SAE 21434, 2021) or (UNECE R 155, 2021).
Since currently no standards for the auditing of
AI-based systems exist, there are approaches to de-
velop an appropriate standardization. Best known
here is the (EU AI Act, 2021) which tries to lay down
uniform regulations for AI-based systems. It presents
a horizontal regulatory approach with necessary re-
quirements to address different risks and challenges
when AI is used, without focusing on the needs for
specific application areas. Similarly, (ISO/IEC TR
24028, 2020) focuses on the trustworthiness of AI-
based systems without considering a concrete appli-
cation domain. It surveys different generic threats
and risks and also covers existing mitigation strate-
gies. Additionally, (ISO/IEC TR 24029-1, 2021) pro-
vides background information on existing methods to
assess the robustness of generic DNNs.
In addition to the already published drafts for stan-
dardization of AI-based systems mentioned above,
there are also ongoing standardization activities. This
includes (ISO/IEC DTR 5469, 2022), which covers
aspects of functional safety specific for AI-based sys-
tems. In addition, (ISO/IEC PRF TS 4213, 2022) fo-
cuses on methods to assess the performance of ML-
based classification systems. Furthermore, there are
standardization activities on a national level which in-
clude the (DIN Roadmap AI, 2022). Here, require-
ments and challenges as well as standardization needs
for seven topics around AI are discussed.
In contrast to these horizontal regulatory ap-
proaches, there are also vertical regulatory ap-
proaches. These aim to develop standards for con-
crete application areas and multiple standards are in
development for the usage of AI in (high-risk) mo-
bility applications. Here, (ISO/AWI TS 5083, 2022)
gives guidance of the steps for developing and val-
idating safe AD/ADAS systems. It covers the SAE
levels L3/L4 and the impact of using AI-based sys-
tems as part of larger AD/ADAS systems. Addition-
ally, (ISO/AWI PAS 8800, 2022) focuses specifically
on the interaction between safety and AI. It defines
risk factors for vulnerabilities in the behavior of AI
within mobility applications.
Finally, there are only very few publications avail-
able that focus on the auditing of AI systems in prac-
tice. Here, (Raji et al., 2020) introduces a framework
for auditing AI-based systems throughout the internal
development lifecycle. This results in a series of doc-
uments which form an overall audit report that can be
used by auditors for a formal audit.
After discussing available and developing stan-
dards for AI-based systems in general and specific
to mobility applications, we now shortly present an
overview of related publications which focus on spe-
cific vulnerabilities or challenges that exist for AI-
based systems. In (Li et al., 2022) the authors
present a summary of important aspects for trustwor-
thy systems which they deem necessary to be audited.
(Berghoff et al., 2020) focuses on discussing known
vulnerabilities of current AI-based systems and how
they compare with traditional algorithm-based sys-
tems. Similarly, (Mohseni et al., 2020) first discusses
current vulnerabilities specific to AI-based systems
and then present possible mitigation strategies.
Concretely, there are multiple new security chal-
lenges for AI-based systems. These include model
extraction attacks (Papernot et al., 2017; Orekondy
et al., 2019), where an adversary attempts to copy
the functionality of a victim AI model. Next, evasion
attacks, also known as adversarial attacks (Szegedy
et al., 2014; Madry et al., 2018), are carefully
perturbed input samples (adversarial examples) that
change the prediction of AI-based systems according
to the will of an adversary. This imposes a threat on
the integrity of the system. Lastly, data poisoning at-
tacks (Goldblum et al., 2020; Schwarzschild et al.,
2021) describe the injection of poisoned data samples
ICISSP 2023 - 9th International Conference on Information Systems Security and Privacy
340

in the training dataset of an AI-based system. This de-
grades the behavior of the resulting system depending
on the specific goals of the adversary.
In addition to security related AI-specific vulnera-
bilities there are also challenges regarding the robust-
ness against natural perturbations (Hendrycks and Di-
etterich, 2019; Geirhos et al., 2020). Concretely, out-
of-domain data describes the presence of data sam-
ples that deviate from the exact training distribution
used during training of an AI-based system. This ef-
fect occurs naturally when systems are deployed in
the real-world outside of a completely supervised en-
vironment and presents a challenge on the generaliza-
tion of such systems.
Also, the existing black-box character of AI-based
systems, combined with the complexity and number
of parameters of DNNs, complicates the possibility
to explain the behavior of a system. It is largely un-
clear how a system arrives at its predictions and which
features of a data sample are most important for a con-
crete prediction. Therefore, the need arises for meth-
ods that can explain the decision or general behavior
of a system that is learned from data. These methods
are published under the term of explainable artificial
intelligence (Gilpin et al., 2018; Guidotti et al., 2018).
3 GENERIC AUDIT
REQUIREMENTS
In the following, generic requirements are derived
based on a detailed analysis of established security
and safety standards. As stated in section 2 cur-
rently there are no existing AI-specific certification
standards, norms or regulations for systems in mobil-
ity applications. The available standards and norms
are designed for traditional algorithm-based automo-
tive systems. We extract their AI-relevant aspects and
complement them with AI-specific formulations.
3.1 Requirements Elicitation
Due to the special characteristics of AI components
(e.g. high data complexity, non-linearity or lack of
interpretability), some of the existing standards may
not apply to such components or have to be adjusted
to also ensure the safety and security of AI-based sys-
tems. Hence, the generic requirements are formulated
to address the technical aspects performance, robust-
ness, explainability, external monitoring and the doc-
umentation of the entire mobility system and its AI
subsystems. Furthermore, we consider requirements
along the entire lifecycle of such systems. Fairness
and privacy are out of scope for this work and should
be addressed in future research. In total we formulate
50 generic requirements, which are available in the
project report at (AIMobilityAuditPrep, 2022). In the
following, we present our general approach to derive
the requirements and discuss three exemplary require-
ments which can be applied to most AI-based systems
and are highly relevant.
The (ISO 26262, 2018) introduces the automo-
tive safety level integrity (ASIL), which is a risk
level based classification of recommendations for au-
tomotive systems. In this classification scheme the
system’s risk level is categorized in four risk lev-
els, through the possible exposure to hazards, the
controllability of a hazard and the severity of pos-
sible injuries to the driver and passengers stemming
from the hazard. The four ASIL levels range from
“ASIL A” associated with the lowest degree of risk
to “ASIL D” associated with the highest degree of
risk. The ISO 26262 associates safety requirements
to recommendations for each risk level. These recom-
mendations are described as “highly recommended”
(++), “recommended” (+) and “not recommended”
(o), where “highly recommended” indicates a need
for implementation of the associated requirement for
an application associated with the corresponding risk
level. Since the ASIL is a well-defined classification
scheme, we follow this risk level based categorization
approach to classify each of the requirements accord-
ing to their risk level definition. This allows for a risk
based selection of a set of requirements for each indi-
vidual mobility application.
During a homologation process, the integration of
vehicle components is evaluated at each integration
step. Therefore, the functional safety and security of
the entire mobility system must be addressed during
the requirements elicitation. Accordingly, we catego-
rize the requirements whether they apply to the entire
mobility system or the AI subsystem.
3.2 Entire System Requirements
To provide more insight into the requirements elic-
itation process, we show an example requirement
catered towards the entire system and its ASIL clas-
sification. REQ. 7 from Table 1 ensures that the per-
formance of the entire system is not affected under
worst-case conditions. This can either encompass
natural phenomena such as weather or lighting con-
ditions, but also security threats for example by ad-
versarial attacks or side-channel attacks. It is derived
from the ASIL recommendation which states that the
system shall be tested against worst-case errors. An
example definition of a worst-case error is provided
in subsection 5.3.
Towards Audit Requirements for AI-Based Systems in Mobility Applications
341
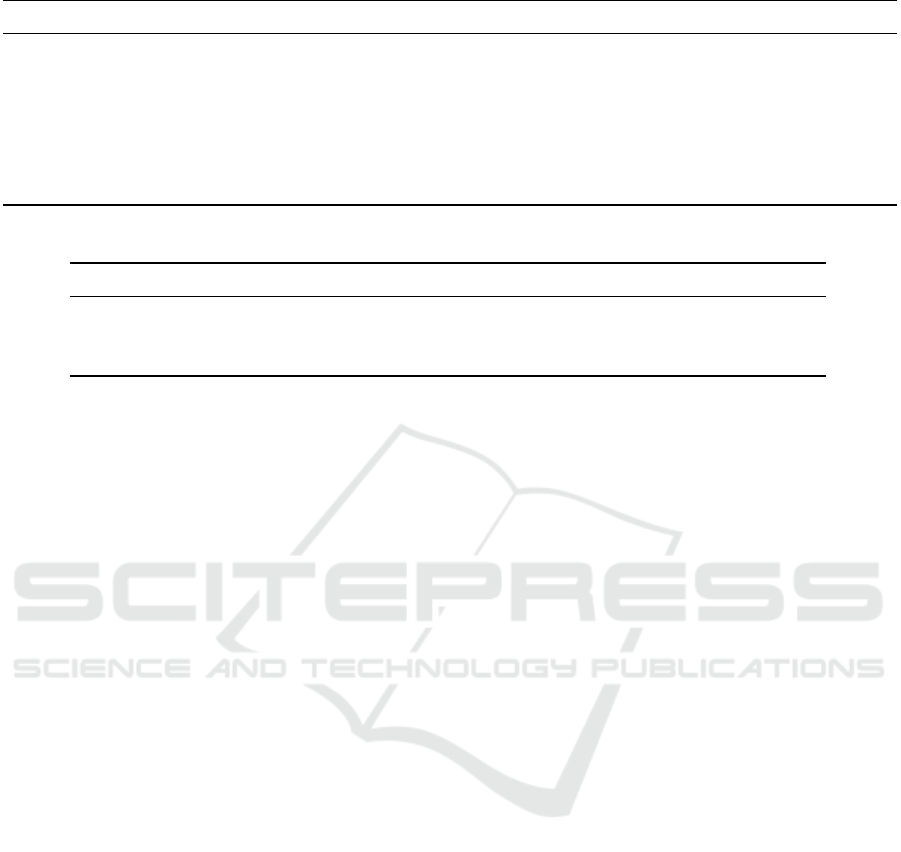
Table 1: Three exemplary generic requirements and their ASIL risk level classification.
Identifier Requirement ASIL A ASIL B ASIL C ASIL D
Req. 7 The performance shall be compliant to the allowed
worst-case error.
++ ++ ++ ++
Req. 30 The training, test and evaluation datasets shall be
independent from each other.
++ ++ ++ ++
Req. 33 The model’s decisions shall be explained to aid the
comparison between the modelling of the system and
the trained model.
++ ++ ++ ++
Table 2: Detailed analysis of the exemplary generic requirements from Table 1.
Identifier Applicability Concretization Testability Test Procedure
Req. 7 Complex Major High Metric-based
Req. 30 Simple Minor High Evidence-based
Req. 33 Complex Minor Medium Metric-based & Evidence-based
3.3 AI Subsystem Requirements
REQ. 33 from Table 1 is targeted towards the AI sub-
system within the mobility system. This requirement
is derived from an ASIL recommendation that states
that the modelling of the system shall be compared to
the resulting system. It is modified to fit the AI sub-
system by stating that the model’s decisions shall be
explained. This is because AI models are similar to
black-boxes and there is low to no insight into how
the model’s decisions are made. Therefore, specific
explainability methods shall be used to gain insight
into the correct functionality.
Analogously, REQ.30 states that the training,
evaluation and testing datasets used during the devel-
opment shall be independent from each other. This
ensures that performance or training issues can be de-
tected during the training phase. The testing proce-
dure for this requirement depends on the size and for-
mat of the datasets at hand. An example evaluation of
this requirement is explained in subsection 5.3.
3.4 Testability and Applicability
The above-formulated requirements must be specified
for each individual use case. To determine the effort
needed to transfer a requirement between different
mobility use cases we perform an analysis to deter-
mine the applicability and testability of each require-
ment. Additionally, we also provide indicators on the
concretization effort between use cases and the type
of test procedure. Table 2 presents the categorization
for the 3 example requirements from subsection 3.2
and subsection 3.3.
4 AI-BASED SYSTEMS IN
MOBILITY APPLICATIONS
To assess the suitability of the generic audit require-
ments proposed in section 3, we aim to perform prac-
tical tests for a concrete AI-based system. To achieve
universally applicable results, this system should be
representative for different use cases in mobility ap-
plications and at the same time enable efficient initial
tests. Thus, to select the most suitable exemplary use
case we first introduce categories, which help to as-
sess the suitability of different use cases. Following,
we present a summary of possible AI-based use cases
in mobility applications. Based on the introduced cat-
egories we then analyze all collected use cases to de-
cide which use case is best suited for the initial prac-
tical tests of the audit requirements.
4.1 Analysis Categories
To assess the suitability of different AI-based use
cases in mobility applications for the practical audit
requirements tests we choose five categories. These
cover important aspects regarding the feasibility of
the tests and the meaningfulness of the achieved re-
sults. In Table 3 these are later applied to individual
use cases in mobility applications.
First, the relevance of each use case for the safety
of the entire mobility system is rated as high, medium,
low or none. To achieve results for the auditing of
the most critical use cases it is preferable to select a
use case where a certain amount of safety relevance
is given and a high relevance is ideal. This allows to
ICISSP 2023 - 9th International Conference on Information Systems Security and Privacy
342

develop audit criteria for critical tasks where an audit
is important and required.
Next, the complexity and auditability of each use
case is categorized as complex, medium or simple.
This category covers the test effort required to derive
the residual risk of an AI-based system implement-
ing a use case. For the initial practical tests, it is
preferable to select a use case with rather low com-
plexity. This enables the most feasible development
and to perform more extensive tests.
Third, the applicability of potential (adversarial)
attacks on the AI component of each use case is rated
as unrealistic, complex, medium or simple. The most
important factors that influence the categorization are
the scalability of an attack, the availability of litera-
ture or demonstrations of an attack and the required
access interface of an adversary. Here, it is impor-
tant that a direct attack interface to the AI component
exists and it is best when attacks are comparatively
simple to execute in practice.
Additionally, the required resources for imple-
menting an exemplary system of each use case are
rated as high, medium or low. Multiple factors like the
availability of open-source datasets or representative
implementations, the model size of involved AI com-
ponents and the required computational resources for
training or inference are considered. It is most suit-
able when datasets and implementations are publicly
available and only low resources are required.
Lastly, the generalizability of the results of the
practical audit requirements tests to other use cases
is categorized as high, medium or low. Most impor-
tantly, this categorization considers which sensors are
used, which perception components are involved and
whether the use case impacts the planning or control
of a vehicle. Use cases are preferable when some of
these characteristics are shared with other use cases.
4.2 Potential Use Cases
Selecting a representative use case from the sheer
number of potential use cases in AI-based mobility
applications (Yurtsever et al., 2020; Ziebinski et al.,
2016) is a difficult task. We tackle this by first collect-
ing a list of ten high-level use cases which commonly
occur in the specific areas of AD/ADAS. For such use
cases the need for audit requirements and procedures
is highest, as associated systems are safety-relevant
and are increasingly tested on public roads.
Concretely, we start by considering AD/ADAS
use cases which have a direct impact on the control
of a vehicle. For all use cases we include the re-
quired perception of the respective road users or ob-
jects, meaning we do not only consider the final con-
trol algorithms. Here, the first use case is termed colli-
sion avoidance, which includes all functionalities that
react to potential obstacles in the driving path of a ve-
hicle, by initiating deceleration and/or steering mo-
tions. Notably, collision avoidance also contains (au-
tomatic) emergency breaking. Next, we consider the
lane keeping use case, which includes all function-
alities that keep a vehicle in the current driving lane.
Here, mainly steering motions are performed to tackle
the given task. Further, we consider the lane changing
use case, which includes all functionalities that lead to
a change in the driving lane of the vehicle. Like lane
keeping, steering motions are most important but also
acceleration or deceleration motions are required to
be able to merge in between two vehicles. Fourth, the
adaptive cruise control use case includes functional-
ities that manage the distance to a vehicle driving in
front of the ego vehicle. Here, deceleration and accel-
eration motions are important to control the distance
to the leading vehicle adaptively based on its driving
maneuvers and speed.
After presenting use cases that directly affect the
control of a vehicle, we now discuss additional use
cases which have no direct control impact but are im-
portant to obtain a list of the most important AI-based
AD/ADAS use cases. Therefore, the fifth use case
is global path planning. This includes functionali-
ties to plan the global route/path of a vehicle, which
consists of the rough path from the starting location
to the target location. This route is updated online
during driving depending on the current occupancy
of roads or the probability of traffic jams. Next, the
traffic sign assistant use case includes all functional-
ities that show currently relevant traffic signs to the
driver. However, this purely acts as an assistance fea-
ture and for example does not adapt the speed of a ve-
hicle to the detected speed limit automatically. Addi-
tionally, we consider the driver monitoring use case.
Here, the goal is to detect drowsiness or distraction
of a driver and provide a warning to the driver. This
can reduce the number and criticality of accidents and
is important when the driver must monitor assistance
functionalities and be able to intervene rapidly.
In addition to the use cases that describe a spe-
cific functionality, we also consider basic use cases
which provide information for various AD/ADAS-
related functionalities. Here, the map-based localiza-
tion use case includes functionalities to determine the
current position of a vehicle as it navigates through
the environment. Typically, a map of the environment
is used which can either be created dynamically or is
created a priori. Next, the road user detection use case
is considered, which includes functionalities to detect
dynamic traffic participants like pedestrians, vehicles
Towards Audit Requirements for AI-Based Systems in Mobility Applications
343
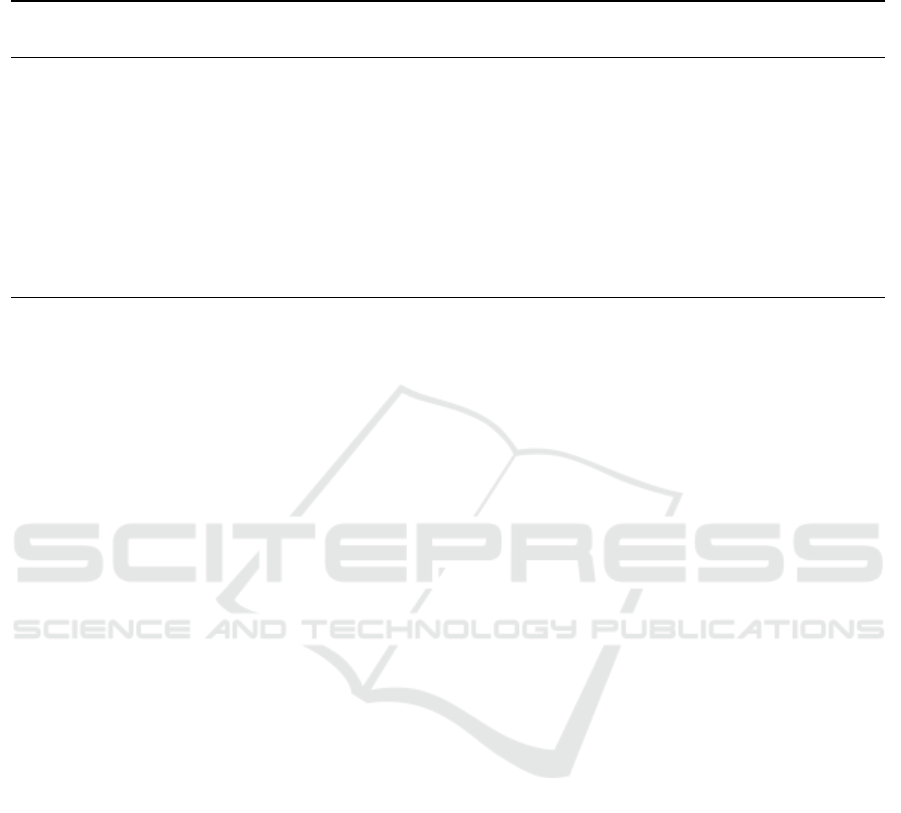
Table 3: Overview of considered AI-based use cases in mobility applications and their suitability for the practical testing of
audit requirements. For each parameter, the symbol in brackets indicates whether this parameter value is suitable (↑), partially
suitable (o) or unsuitable (↓) for the initial testing of the proposed audit requirements.
Use Case Safety Complexity/ Attack Required Generalizability
Relevance Auditability Applicability Resources
Collision Avoidance High (↑) Complex(o) Medium (o) High (↓) High (↑)
Lane Keeping High (↑) Medium (o) Simple (↑) Medium (o) Medium (o)
Lane Changing High (↑) Complex(o) Medium (o) High (↓) High (↑)
Adaptive Cruise Control High (↑) Medium (o) Complex(o) High (↓) Medium (o)
Global Path Planning None (↓) Simple (↑) Unrealistic (↓) High (↓) Low (o)
Traffic Sign Assistant Low (o) Simple (↑) Simple (↑) Low (↑) Medium (o)
Driver Monitoring Medium (o) Medium (o) Unrealistic (↓) Medium (o) Low (o)
Map-based Localization High (↑) Medium (o) Complex(o) High (↓) Low (o)
Road User Detection High (↑) Complex(o) Medium (o) Medium (o) Medium (o)
Behavior Prediction High (↑) Complex(o) Unrealistic (↓) Medium (o) Low (o)
or cyclists. Lastly, the behavior prediction use case
includes functionalities to identify the behavior and
subsequently the trajectory of traffic participants. All
three use cases have no direct impact on the control
of a vehicle since they only provide information to
functionalities for specialized use cases like collision
avoidance or lane changing.
4.3 Use Case Selection
After collecting a list of use cases in AI-based mo-
bility applications we use the categories from subsec-
tion 4.1 to assess the suitability of each presented use
case in Table 3. It is important to note that the as-
signed values in each category must be seen relative to
each other. For example, the value low only indicates
that the use case is on the lower end when compared
to all other presented use cases.
For the final selection of a use case, we start by
dropping all use cases which do dot not fulfill the
basic prerequisite for any category. This means that
global path planning is no longer considered since it
has no direct safety relevance and it is unrealistic to
apply attacks which target the AI component directly.
Similarly, driver monitoring and behavior prediction
are also no longer considered as it is very challeng-
ing or unrealistic for an adversary to apply attacks.
Next, the use cases collision avoidance, lane chang-
ing, adaptive cruise control and map-based localiza-
tion are considered as unsuitable because they typi-
cally require larger model sizes and less use case spe-
cific datasets are available for training and testing.
After dropping the seven unsuitable use cases only
the three use cases lane keeping, traffic sign assis-
tant and road user detection are considered for fur-
ther analysis. All three are in principle suitable and
fulfill the basic prerequisites for all categories from
subsection 4.1. The remaining use cases differ with
respect to their safety relevance (higher for lane keep-
ing and road user detection) and their resource re-
quirements/complexity (lower for traffic sign assis-
tant). To be able to test more audit requirements with
the available resources we value the feasibility, i.e.
the lower complexity, higher and select the traffic sign
assistant use case for further practical investigations.
More complex and safety-relevant use cases can be
explored later, once it is shown that the audit require-
ments can be applied and provide useful results. De-
tails on the implementation of a system representing
the selected use case are given later in subsection 5.1.
5 PRACTICAL
IMPLEMENTATION
To test the applicability and expressiveness for real
applications we implement the selected generic audit
requirements from section 3 for the traffic sign assis-
tant use case. Thus, in the following we first introduce
the detailed architecture of the exemplary ADAS sys-
tem which represents the traffic sign assistant func-
tionality. Then, we discuss the application of some in-
teresting audit requirements and describe results and
challenges.
5.1 Experimental Setup
For the traffic sign assistant use case, a single outside
facing forward RGB camera sensor is used. Based
on the data of this sensor, the classification (and pre-
ceding detection) of traffic signs is performed using a
DNN. This mimics the approach used for real traffic
sign assistants (Lim et al., 2017). For our initial prac-
tical experiments, we only consider a DNN that per-
forms a pure classification of traffic signs. The reason
ICISSP 2023 - 9th International Conference on Information Systems Security and Privacy
344

is that typically there exists a common detector for all
kinds of road users and elements, like traffic signs, ve-
hicles, pedestrian, etc. Based on the detected objects,
the content of the detected bounding boxes is fed to
special classification modules that specialize in con-
cretely classifying the object in a box. For the case
of a traffic sign assistant this means that a preceding
road elements detector exists which outputs bounding
boxes around detected signs. Then, a classifier that
focusses on traffic signs is used to determine the ex-
act sign type based on the given subset of the entire
image selected by the preceding detector. The output
of this system is therefore the detected traffic sign in
the given image. In this work we use the classifier to
test the proposed audit requirements in practice.
To train the DNN that classifies traffic signs we
use the German Traffic Sign Recognition Benchmark
(GTSRB) (Stallkamp et al., 2011) as training dataset.
This dataset features 43 classes of German traffic
signs. Using this dataset, we train a ResNet-18 (He
et al., 2016) to represent the traffic sign assistant.
ResNet-18 is selected because this architecture is one
of the most successful architectures in DNN history
and is often used in literature as a sensible baseline
independent of the concrete task and use case. The
training is performed without any augmentations and
using only the standard GTSRB training dataset.
5.2 Generic Toolbox
To allow for an easy expansion of our tests to further
mobility use cases, we design a toolbox in a modu-
lar way. In this work the toolbox is implemented in
an exemplary fashion for the traffic sign assistant use
case and some audit requirements discussed in sub-
section 5.3. The goal is to continuously expand this
toolbox
1
and incorporate more audit requirements and
use cases over time.
5.3 Application of Requirements
The generic catalogue of requirements that is elicited
in section 3 enables a simple selection of require-
ments based on the risk level of the specific use case.
We assume the traffic sign assistant to be an assistance
system which is not able to gain automated control of
the vehicle on its own. However, as input to an AD
system that for example regulates the vehicle’s speed
in a certain range based on the detected traffic signs
and additional parameters, the use case might be clas-
sified as ASIL A during homologation. Due to this
assumption, we select and specify requirements that
1
An overview of the toolbox is available at www.bsi.
bund.de/dok/1079914.
are “highly recommended” (++) for the ASIL A risk
level from our requirement catalogue (AIMobilityAu-
ditPrep, 2022).
After the requirements are selected, the evaluation
process consists of the following three steps for each
requirement:
1. Parameter selection: If the requirement requires
the specification of parameters, the parameters
are chosen according to the use case (if nec-
essary by domain experts). Moreover, a ratio-
nale/justification how these parameters are de-
rived is provided.
2. Description of the audit procedure: The audit
procedure for the requirement is described. For
“metric-based” requirements the technical evalu-
ation/tests that are performed shall be described.
For “evidence-based” requirements the procedu-
ral evaluation of evidence is described.
3. Verdict: The test results of “metric-based” tests or
findings of “evidence-based” evaluations are as-
sessed and a “pass” or “fail” verdict is given de-
scribing whether the requirement is fulfilled.
In the following, we schematically show these steps
for the exemplary requirements introduced in sec-
tion 3 with the traffic sign assistant use case described
in subsection 5.1.
5.3.1 Requirement 7
The performance shall be compliant to the allowed
worst-case error.
To fulfill this requirement the “performance” and “al-
lowed worst-case error” have to be specified. In the
case of the traffic sign assistant use case, we choose
to measure the “performance” through the accuracy
of the system. The “allowed worst-case error” is cho-
sen as an accuracy greater than 90 % and we take
heavy rain as an example of a worst-case error. In
the scope of this work, we schematically assume the
vehicle running the traffic sign assistant is operated
in Germany, where heavy rain is common and a 90 %
accuracy still offers sufficient reliability of the assis-
tance system. This selection for the two parameters
only serves as an example to demonstrate how the re-
quirement can be tested in practice. Depending on the
boundary conditions, operational design domain, mit-
igation strategies or level of automation of the overall
system it could be necessary to adapt the value for the
required accuracy. The rationale for the selection of
these two parameters in a real-world use case requires
a rationale from domain experts.
The audit procedure for this requirement is
“metric-based”, where a dataset (that the model was
Towards Audit Requirements for AI-Based Systems in Mobility Applications
345

(a) GTSRB class 21. (b) GTSRB class 42.
Figure 1: Examples of the heavy rain transformation.
not trained on) containing data samples of all classes
in heavy rain conditions is evaluated by the model.
It is possible to use data samples captured in heavy
rain conditions or transform data samples from clear
weather conditions with a heavy rain simulation. If
the accuracy of this evaluation is greater than 90 %,
the requirement is fulfilled.
Our toolbox implements a heavy rain transforma-
tion using the albumentations library (Buslaev et al.,
2020). This allows to test the worst-case error on any
suitable traffic sign dataset under heavy rain condi-
tions. We transform images from GTSRB using their
heavy rain transformation, which for example results
in images depicted in Figure 1. On 2580 data samples
the system reaches an accuracy of ∼ 79 %. Since the
accuracy from the evaluation under heavy rain trans-
formation is 79 %, which is not greater than 90 %, the
requirement is not fulfilled and fails this evaluation.
For real-world use cases an assessment of domain ex-
perts is required regarding the representativity of dif-
ferent parameters of the used heavy rain transforma-
tion like the strength or structure of the rain drops.
Alternatively, a worst case could be represented
by an adversarial attack to the system. As an example
we take a PGD attack (Madry et al., 2018) with a per-
turbation budget of 0.3. We repeat the outlined audit
process but execute a PGD attack instead of applying
a heavy rain transformation. Against this attack the
system reaches an accuracy of ∼ 21 % which means
REQ. 7 is also not fulfilled using this second speci-
fication. Note that PGD represents an attack in the
digital domain. In reality physical attacks which are
applied in the environment itself pose a larger threat
and testing against such attacks is more important.
5.3.2 Requirement 30
The training, test and evaluation datasets shall be
independent from each other.
Since REQ. 30 has no parameters to be set, this step
is skipped. The testing procedure of this require-
ment is classified as “evidence-based”. Hence, the
dataset documentation, code and contents of each of
the datasets shall be consulted. The documentation
and code of the training procedure gives insight on
how these datasets are generated. In this example, the
evidence showed that the datasets were split before
training the model into three disjoint datasets. Also,
the datasets follow the same underlying distribution
and are independent. Therefore, the requirement is
fulfilled. It is important to use independent splits of
the data to get a fair assessment of the quality of a
model. For example, images from a video recording
of a single scene should not be used in different splits.
Instead, images from a different recording like a dif-
ferent scene or in different weather must be used.
5.3.3 Requirement 33
The model’s decisions shall be explained to aid the
comparison between the modelling of the system and
the trained model.
For this requirement, the method used for explaining
the decision and the system modelling the decisions
have to be determined. In the schematic traffic sign
assistant use case, we choose the following exem-
plary functional system requirement: The model de-
cision on a traffic sign image shall depend on the fig-
ure displayed by the traffic sign, the signs coloration
and/or the shape of the sign. In real-world applica-
tions depending on the chosen modelling, it would
also be possible to implement automatic testing de-
tecting whether a certain amount of background infor-
mation is considered for the model’s decisions. In our
case, we choose the GradCam explainability method
(Selvaraju et al., 2017) to explain a random set of 60
images per GTSRB class. Figure 2 presents some ex-
amples of a GradCam explanation on some images of
the GTSRB dataset. It clearly shows that the most
important information for the decision (highlighted in
red) of the model is based on the center of the im-
age. We analyze all 60 images for each class and they
show similar results. Hence, this evaluation is passed
and the requirement is fulfilled.
6 CONCLUSION
6.1 Summary
We introduce a list of generic audit requirements,
which are technically relevant to assure the trust-
worthiness, security, safety, robustness, explainabil-
ity, etc. of AI-based systems in mobility applica-
tions. These requirements evolved under attention
ICISSP 2023 - 9th International Conference on Information Systems Security and Privacy
346

(a) GTSRB class 0. (b) GTSRB class 2.
Figure 2: Examples of the GradCam explanation. The infor-
mation with the highest influence on the model’s decision is
highlighted in red.
to existing regulations, norms, guidelines and an ex-
tensive literature review. Additionally, we implement
tools for exemplary audit requirements to demonstrate
the applicability using a selected mobility applica-
tion. For this, we perform a comparison of different
AD/ADAS use cases, based on various categories like
complexity, auditability, available resources. Using
this analysis, we determined the traffic sign assistant
use case to be best suited for the initial practical test-
ing of the audit requirements. Thus, we examine two
exemplary DNNs trained on German traffic signs us-
ing the implemented audit requirements. We find that
the generic audit requirements can be specified to pro-
vide meaningful results on the DNN-based traffic sign
assistants for different AI-specific properties.
6.2 Outlook
As discussed in subsection 5.3 we only use a subset
of all proposed audit requirements for the initial prac-
tical tests. A natural next step is to extend the practi-
cal tests to include all proposed requirements. Addi-
tionally, one can expand the extent of the already im-
plemented requirements. Some of these requirements
are quite extensive and can be implemented for prac-
tical tests in different ways. In a follow-up work the
exemplary implementation can be expanded to cover
further aspects of the associated audit requirements.
This enables more extensive audits and increases the
meaningfulness of the obtained results.
Furthermore, it is especially interesting to test
some audit requirements using actual hardware and
test facilities. Instead of performing all tests in a
simulation environment, the most interesting audit re-
quirements should also be tested in reality. Only these
tests enable to properly assess the feasibility and ex-
pressiveness of the proposed audit requirements.
Additionally, the complexity of the audited system
should be increased. Instead of using only a DNN-
based classifier, the system should be extended to be
more representative of systems used in reality. Ide-
ally, this is complemented by the application of the
audit requirements to industry systems operating in
practice. This allows judging the applicability under
real-world conditions and limitations.
Our goal is to continue this work and to consider
at least one additional use case in addition to the traf-
fic sign assistant. We are working actively on the out-
lined next steps to further increase the meaningfulness
of our results and refine the proposed requirements
and best practices based on practical insights and lim-
itations. We want to move towards applying the audit
requirements in practice and create a formal techni-
cal guideline. The obtained results could then be used
as a blueprint for standardization activities and should
be introduced to the relevant committees.
ACKNOWLEDGEMENTS
This work was supported by the Federal Office for
Information Security (BSI), Germany, in project P538
AIMobilityAuditPrep.
REFERENCES
AIMobilityAuditPrep (2022). AIMobilityAuditPrep: Fi-
nal Results - Documentation. Technical report, Ger-
man Federal Office for Information Security. www.
bsi.bund.de/dok/1079912.
ANSI/UL 4600 (2022). Standard for Safety for the Evalu-
ation of Autonomous Products. Standard, American
National Standards Institute, Underwriters Laborato-
ries.
Berghoff, C., Neu, M., and von Twickel, A. (2020). Vulner-
abilities of Connectionist AI Applications: Evaluation
and Defence. Frontiers in Big Data, 3.
Buslaev, A., Parinov, A., Khvedchenya, E., Iglovikov, V.,
and Kalinin, A. (2020). Albumentations: Fast and
Flexible Image Augmentations. Information, 11.
DIN Roadmap AI (2022). German Standardization
Roadmap on Artificial Inteligence. Draft, German In-
stitute for Standardization.
EU AI Act (2021). Regulation of the European Parlia-
ment and of the Council Laying Down Harmonised
Rules on Artificial Intelligence and Amending Certain
Union Legislative Acts. Draft, European Commission.
Geirhos, R., Jacobsen, J., Michaelis, C., Zemel, R., Brendel,
W., Bethge, M., and Wichmann, F. A. (2020). Shortcut
Learning in Deep Neural Networks. Nature Machine
Intelligence, 2:665–673.
Gilpin, L., Bau, D., Yuan, B., and Bajwa, A. (2018). Ex-
plaining Explanations: An Overview of Interpretabil-
ity of Machine Learning. In International Conference
on Data Science and Advanced Analytics, Turin, Italy.
Towards Audit Requirements for AI-Based Systems in Mobility Applications
347

Goldblum, M., Tsipras, D., Xie, C., and Chen, X. (2020).
Dataset Security for Machine Learning: Data Poison-
ing, Backdoor Attacks, and Defenses. IEEE Transac-
tions on Pattern Analysis & Machine Intelligence.
Guidotti, R., Monreale, A., Ruggieri, S., Turini, F., Gian-
notti, F., and Pedreschi, D. (2018). A Survey Of Meth-
ods for Explaining Black Box Models. ACM Comput-
ing Surveys, 51:1–42.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep Resid-
ual Learning for Image Recognition. In Conference on
Computer Vision and Pattern Recognition, Las Vegas,
USA.
Hendrycks, D. and Dietterich, T. (2019). Benchmarking
Neural Network Robustness to Common Corruptions
and Perturbations. In International Conference on
Learning Representations, New Orleans, USA.
ISO 21448 (2022). Road vehicles - Safety of the intended
funtionality. Standard, International Organization for
Standardization.
ISO 26262 (2018). Road vehicles - Functional safety. Stan-
dard, International Organization for Standardization.
ISO/AWI PAS 8800 (2022). Road vehicles - Safety and
artificial intelligence. Standard, International Organi-
zation for Standardization.
ISO/AWI TS 5083 (2022). Road vehicles - Safety for auto-
mated driving systems - Design, verification and vali-
dation. Standard, International Organization for Stan-
dardization.
ISO/IEC DTR 5469 (2022). Artificial intelligence - Func-
tional safety and AI systems. Standard, International
Organization for Standardization, International Elec-
trotechnical Commission.
ISO/IEC PRF TS 4213 (2022). Artificial intelligence -
Assessment of machine learning classification perfor-
mance. Standard, International Organization for Stan-
dardization, International Electrotechnical Commis-
sion.
ISO/IEC TR 24028 (2020). Artificial intelligence -
Overview of trustworthiness in artificial intelligence.
Standard, International Organization for Standardiza-
tion, International Electrotechnical Commission.
ISO/IEC TR 24029-1 (2021). Artificial intelligence - As-
sessment of the robustness of neural networks - Part
1: Overview. Standard, International Organization for
Standardization, International Electrotechnical Com-
mission.
ISO/SAE 21434 (2021). Road vehicles - Cybersecurity en-
gineering. Standard, International Organization for
Standardization, SAE International.
Karpathy, A. (2021). Workshop on Autonomous Driving
- Tesla Keynote. In Conference on Computer Vision
and Pattern Recognition, Nashville, USA.
Li, B., Qi, P., Liu, B., Di, S., Liu, J., Pei, J., Yi, J., and
Zhou, B. (2022). Trustworthy AI: From Principles to
Practices. ACM Computing Surveys.
Lim, K., Hong, Y., Choi, Y., and Byun, H. (2017). Real-time
Traffic Sign Recognition based on a General Purpose
GPU and Deep Learning. PLOS ONE, 12:1–22.
Madry, A., Makelov, A., Schmidt, L., Tsipras, D., and
Vladu, A. (2018). Towards Deep Learning Models
Resistant to Adversarial Attacks. In International
Conference on Learning Representations, Vancouver,
Canada.
Mohseni, S., Pitale, M., Singh, V., and Wang, Z. (2020).
Practical Solutions for Machine Learning Safety in
Autonomous Vehicles. In Conference on Artificial In-
telligence: Workshop on Safe AI, New York, USA.
Orekondy, T., Schiele, B., and Fritz, M. (2019). Knockoff
Nets: Stealing Functionality of Black-Box Models. In
Conference on Computer Vision and Pattern Recogni-
tion, Long Beach, USA.
Papernot, N., McDaniel, P., Goodfellow, I., Jha, S., Celik,
B., and Swami, A. (2017). Practical Black-Box At-
tacks against Machine Learning. In ACM Asia Con-
ference on Computer and Communications Security,
Abu Dhabi, United Arab Emirates.
Radlak, K., Szczepankiewicz, M., Jones, T., and Serwa,
P. (2020). Organization of Machine Learning based
Product Development as per ISO 26262 and ISO/PAS
21448. In Pacific Rim International Symposium on
Dependable Computing, Perth, Australia.
Raji, I. D., Smart, A., White, R., Mitchell, M., Gebru,
T., Hutchinson, B., Smith-Loud, J., Theron, D., and
Barnes, P. (2020). Closing the AI Accountability Gap:
Defining an End-to-End Framework for Internal Al-
gorithmic Auditing. In ACM Conference on Fairness,
Accountability, and Transparency, Barcelona, Spain.
SAE J3016 (2014). Levels of Driving Automation. Stan-
dard, SAE International.
Schwarzschild, A., Goldblum, M., Gupta, A., Dickerson,
J., and Goldstein, T. (2021). Just How Toxic is Data
Poisoning? A Unified Benchmark for Backdoor and
Data Poisoning Attacks. In International Conference
on Machine Learning, Vienna, Austria.
Selvaraju, R., Cogswell, M., Das, A., Vedantam, R., Parikh,
D., and Batra, D. (2017). Grad-CAM: Visual Expla-
nations from Deep Networks via Gradient-based Lo-
calization. In International Conference on Computer
Vision, Venice, Italy.
Stallkamp, J., Schlipsing, M., Salmen, J., and Igel, C.
(2011). Man vs. Computer: Benchmarking Machine
Learning Algorithms for Traffic Sign Recognition. In
International Joint Conference on Neural Networks,
San Jose, USA.
Szegedy, C., Zaremba, W., Sutskever, I., Bruna, J., Erhan,
D., Goodfellow, I., and Fergus, R. (2014). Intriguing
Properties of Neural Networks. In International Con-
ference on Learning Representations, Banff, Canada.
UNECE R 155 (2021). Uniform provisions concerning the
approval of vehicles with regards to cyber security and
cyber security management system. Standard, United
Nations Economic Commission for Europe.
Waymo (2021). How we’ve built the World’s Most Experi-
enced Urban Driver. Waypoint.
Yurtsever, E., Lambert, J., Carballo, A., and Takeda, K.
(2020). A Survey of Autonomous Driving: Common
Practices and Emerging Technologies. IEEE Access,
8:58443–58469.
Ziebinski, A., Cupek, R., Erdogan, H., and Waechter, S.
(2016). A Survey of ADAS Technologies for the Fu-
ture Perspective of Sensor Fusion. In International
Conference on Computational Collective Intelligence,
Halkidiki, Greece.
ICISSP 2023 - 9th International Conference on Information Systems Security and Privacy
348
