
On the Impact of Grounding on HTN Plan Verification via Parsing
Simona Ondr
ˇ
ckov
´
a
1 a
, Roman Bart
´
ak
1 b
, Pascal Bercher
2 c
and Gregor Behnke
3 d
1
Faculty of Mathematics and Physics, Charles University, Prague, Czech Republic
2
School of Computing, The Australian National University, Canberra, Australia
3
Faculty of Engineering, ILLC, University of Amsterdam, Amsterdam, Netherlands
Keywords:
Hierarchical Planning, HTN (Hierarchical Task Network), Verification, Parsing, Grounding.
Abstract:
The problem of hierarchical plan verification focuses on checking whether an action sequence is a valid hi-
erarchical plan – the action sequence is executable and a goal task can be decomposed into it. The existing
parsing-based verifier works on lifted domain models. In this paper we study whether grounding of the models
could improve efficiency of the verifier. We also explore additional implementation improvements to increase
the speed of the verifier.
1 INTRODUCTION
Planning focuses on generating and ordering actions
into an action sequence (plan) in order to achieve a
specific goal from a given initial state. Hierarchical
planning is a form of planning that is similar to how
people plan, as it splits difficult tasks into easier ones,
until primitive tasks (directly executable actions) are
obtained. Hierarchical planning is important in the ar-
eas of robotics (Kaelbling and Lozano-P
´
erez, 2011),
machine learning (Mohr et al., 2018) or for providing
personalised assistance, e.g., for Do-It-Yourself home
improvement projects (Bercher et al., 2021).
Plan verification is the opposite process to plan-
ning. It checks whether a given action sequence is
a valid plan – checks whether the actions are exe-
cutable, and that goal conditions are present in the
final state (Howey and Long, 2003). So far the
steps are the same for classical and hierarchical plan-
ning. For hierarchical plans a check that a given goal
task (network) decomposes into the action sequence
is needed. Hierarchical plan verification is an NP-
complete problem (Behnke et al., 2015; Bercher et al.,
2022). Plan verification can be used for example in
mixed initiative planning (Behnke et al., 2016).
There are currently three main approaches focus-
ing on hierarchical plan verification: a compilation to
a
https://orcid.org/0000-0001-9081-4988
b
https://orcid.org/0000-0002-6717-8175
c
https://orcid.org/0000-0002-0795-4320
d
https://orcid.org/0000-0002-1445-9934
boolean satisfiability problem (SAT) (Behnke et al.,
2017), a compilation to Hierarchical Task Network
(HTN) planning (H
¨
oller et al., 2022) and parsing-
based approaches (Bart
´
ak et al., 2018; Bart
´
ak et al.,
2020; Bart
´
ak et al., 2021a). There is also a CYK-
based (Cocke–Younger–Kasami algorithm) approach
(Lin et al., 2023a), but it is limited to totally ordered
hierarchical problems. There also exist approaches
that correct a verified plan in case verification fails
(Bart
´
ak et al., 2021b; Lin et al., 2023b), but in this
work we focus on verification, i.e., to verify plans as
quickly as possible.
Hierarchical models share many similarities to
formal grammars (H
¨
oller et al., 2014; H
¨
oller et al.,
2016; Bart
´
ak and Maillard, 2017), as compound tasks
correspond to non-terminal symbols, primitive tasks
(actions) correspond to terminal symbols, and decom-
position methods correspond to production rules. The
sole difference between formal grammars and HTN
planning problems is that task networks specified
in decomposition methods may be partially ordered
(whereas right-hand sides of production rules are to-
tally ordered), and that actions have preconditions
and effects, whereas terminal symbols do not. The
plan verification problem therefore corresponds to the
language membership problem (checking whether a
word is in the language produced by the formal gram-
mar). This is solved via parsing in grammars – and so
we deploy parsing as well in HTN plan verification.
The parsing-based approach is significantly faster
than the SAT-based approach (Bart
´
ak et al., 2020).
However, overall the parsing-based approach is
92
Ondr
ˇ
cková, S., Barták, R., Bercher, P. and Behnke, G.
On the Impact of Grounding on HTN Plan Verification via Parsing.
DOI: 10.5220/0011618400003393
In Proceedings of the 15th International Conference on Agents and Artificial Intelligence (ICAART 2023) - Volume 3, pages 92-99
ISBN: 978-989-758-623-1; ISSN: 2184-433X
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
Table 1: Coverage of tested verifiers showing the number of instances solved for each verifier in each domain group.
#inst TI grounded with plan TI grounded TI lifted Original Planning
to-valid 10,961 10,106 (92.20) 9,763 (89.07) 9,156 (83.53) 9,173 (83.69) 10,925 (99.67)
to-invalid 1,406 1,390 (98.86) 1,378 (98.01) 1,301 (92.53) 1,302 (92.60) 1,364 (97.01)
po-valid 1,209 1,073 (88.75) 1,073 (88.75) 1,038 (85.86) 991 (81.97) 1,110 (91.81)
po-invalid 138 137 (99.28) 137 (99.28) 136 (98.55) 136 (98.55) 129 (93.48)
Table 2: Per instance comparison between grounded (TI grounded with plan) and lifted (TI lifted) verifier.
#inst only grounded only lifted grounded faster lifted faster
to-valid 10,961 1,407 458 4,063 4,546
to-invalid 1,406 104 15 680 593
po-valid 1,209 67 32 567 382
po-invalid 138 1 0 68 63
slower than the recently introduced planning-based
approach (Ondr
ˇ
ckov
´
a et al., 2022). The planning-
based approach uses grounding (more details on this
in Section 3), which is able to eliminate some of the
tasks that the parsing-based verifier creates. We will
analyze and test whether it could also help improve
the efficiency of the parsing-based approach.
The goal of this paper is improving the parsing-
based approach. We picked it because it can a handle
a variety of inputs, conditions, and type of constraints.
This will be described in more detail in the next sec-
tion. Ideally we would like to bring it on par with the
planning-based approach. In order to achieve this, we
will be focusing on two main improvements:
1. Use of a grounding system.
2. Implementation improvements.
The paper is organized as follows. First, we will
provide a definition of the HTN model and formulate
the verification problem more precisely. We will also
explain the parsing-based approach. Second, we will
describe the grounding system we want to use. Third,
we will explain the implementation improvements we
do. Finally, we will provide an empirical evaluation
of our improvements and compare them with the other
approaches and we will analyse the results.
2 HTN PLAN VERIFICATION
Hierarchical task network (HTN) planning is plan-
ning that focuses on decomposition of tasks (Erol
et al., 1996; Bercher et al., 2019). We rely on a
STRIPS model (Fikes and Nilsson, 1971) of actions.
The set of propositions describing a world state is
called P. Each world state S is a set of propositions
that are true in that state. Each action a has three sets
of propositions (pre(a), eff
+
(a), eff
−
(a)), where
pre(a), eff
+
(a), eff
−
(a) ⊆ P. The first set de-
scribes preconditions of the action. These must be
true in the state right before the action. The other two
sets describe the positive and negative effects of the
actions. Negative effect represents what is no longer
true after the action. If all preconditions of an ac-
tion a are satisfied in state S (which immediately pre-
cedes the action), then action a is applicable to state
S. The state immediately following action a will look
like this: γ(S, a) = (S \ eff
−
(a)) ∪eff
+
(a).
An action sequence is executable if all actions are
applicable to the states right before them: pre(a
i
) ⊆
γ(γ(. . . γ(S
0
, a
1
), . . .), a
i−1
).
Let T be a compound task and ({T
1
, ..., T
k
}, C)
be a task network. The decomposition method can
be written as a rule that T decomposes to sub-tasks
T
1
, ..., T
k
under the constraints C:
T → T
1
, ..., T
k
[C]
The order of sub-tasks is described explicitly in C, so
the order of the tasks T
1
...T
k
does not matter. There
are three types of constraints:
• T
1
≺ T
2
: an ordering constraint meaning that in
every plan, task T
1
is before task T
2
.
• before(p, T ): a precondition constraint meaning
that in every plan, the proposition p holds in the
state right before task T .
• between(T
1
, p, T
2
): a prevailing constraint mean-
ing that in every plan, the proposition p holds in
all the states between task T
1
task T
2
.
The hierarchical planning problem can be defined
like this: Given a domain model (i.e., a description of
tasks and their possible decompositions via decompo-
sition methods) and problem instance (i.e., an initial
state S
0
and goal task G), is there an executable action
sequence (also known as plan) to which the goal task
would be decomposable? This plan is the output. The
hierarchical plan verification problem is defined like
this: Assuming an action sequence, an initial state S
0
,
and goal task G, are the actions executable and does
the goal task decompose into the action sequence?
On the Impact of Grounding on HTN Plan Verification via Parsing
93
Table 3: Per domain statistics for the to-valid dataset, showing number of solved instances per verifier and length of the
shortest unverified plan for TI Grounded with plan verifier.
Domain #Plans Verifier Shortest unverified plan for
TI grounded with plan TI grounded TI lifted Original Planning TI grounded with plan
AssemblyHierarchical 193 193 193 131 131 193 none
Barman-BDI 423 390 389 396 395 421 268
Blocksworld-GTOHP 158 126 126 118 118 158 196
Blocksworld-HPDDL 172 165 165 164 166 170 2880
Childsnack 529 529 509 529 529 528 none
Depots 455 455 455 426 426 455 none
Elevator-Learned-ECAI-16 2812 2750 2748 2782 2792 2812 341
Entertainment 159 159 159 159 159 159 none
Factories-simple 123 107 106 96 106 122 1636
Freecell-Learned-ECAI-16 204 204 204 204 204 204 none
Hiking 565 565 534 564 565 565 none
Logistics-Learned-ECAI-16 1108 723 719 1099 1099 1108 344
Minecraft-Player 75 74 24 0 0 75 278
Minecraft-Regular 766 568 546 0 0 755 107
Monroe-Fully-Observable 248 248 248 178 176 248 none
Monroe-Partially-Observable 217 217 217 67 64 217 none
Multiarm-Blocksworld 443 381 381 376 376 443 54
Robot 117 90 90 90 90 117 433
Rover-GTOHP 509 509 426 264 264 509 none
Satellite-GTOHP 296 296 237 145 145 296 none
Snake 183 183 183 171 171 183 none
Towers 17 11 11 13 12 12 4095
Transport 695 668 668 690 691 681 547
Woodworking 494 494 425 494 494 494 none
2.1 HTN Verification via Parsing
The parsing-based approach (Bart
´
ak et al., 2018;
Bart
´
ak et al., 2020; Bart
´
ak et al., 2021a) is a bottom-
up approach. First, it checks for action executability.
To do this, it calculates states between actions. Then
it checks whether each action is applicable to the state
before it. If a goal state is provided, the verifier checks
whether all conditions are present in the final state.
Then the verifier starts building its first tasks.
These are tasks that decompose into actions. We shall
call them layer 1 tasks. Each time the verifier cre-
ates a task, it will also check whether the task is new.
Then the verifier builds another layer of tasks on top
of them. These layer 2 tasks decompose either into
just layer 1 tasks or into a combination of layer 1
tasks and actions. The layers are then continuously
built until a task that recursively decomposes into all
actions is found. Let us name it task T . If a user
has not provided a goal task then task T is the final
task and the plan is valid. If a user provided a goal
task, then task T is compared to the goal task and if
they are the same, the plan remains valid. Otherwise,
the approach will continue looking for other tasks and
checking them against the goal task. If no found task
is compatible then the plan is invalid.
A more detailed description of the approach and
an exact algorithm can be found in the work by Bart
´
ak
et al. (Bart
´
ak et al., 2021a). The reason why we
choose the parsing approach is that it can cover many
intricacies of the HTN networks. For example, it can
handle instances with and without a given goal task as
input (Ondr
ˇ
ckov
´
a et al., 2022). The planning-based
approach requires a goal task. Also to our knowledge
the parsing-based approach is the only approach that
can handle between conditions.
3 GROUNDER
The parsing-based approach to plan verification di-
rectly operates on the lifted HTN planning problem,
i.e., on a problem where actions and methods still
contain variables. At least for planning it is however
often beneficial to not use a (complex) lifted repre-
sentation, but a grounded one instead. For this, one
instantiates all actions, methods, and predicates with
all plausible parameter combinations. “Plausibility”
is usually determined by an overapproximation to the
actions that can appear in any plan, with the addi-
tional condition that this approximation can be effi-
ciently computed. The most common technique is
delete-relaxation – where we ignore the deleting ef-
fects eff
−
(a) of actions and determine all state fea-
tures and actions reachable this way.
This simple mechanic was mainly developed for
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
94
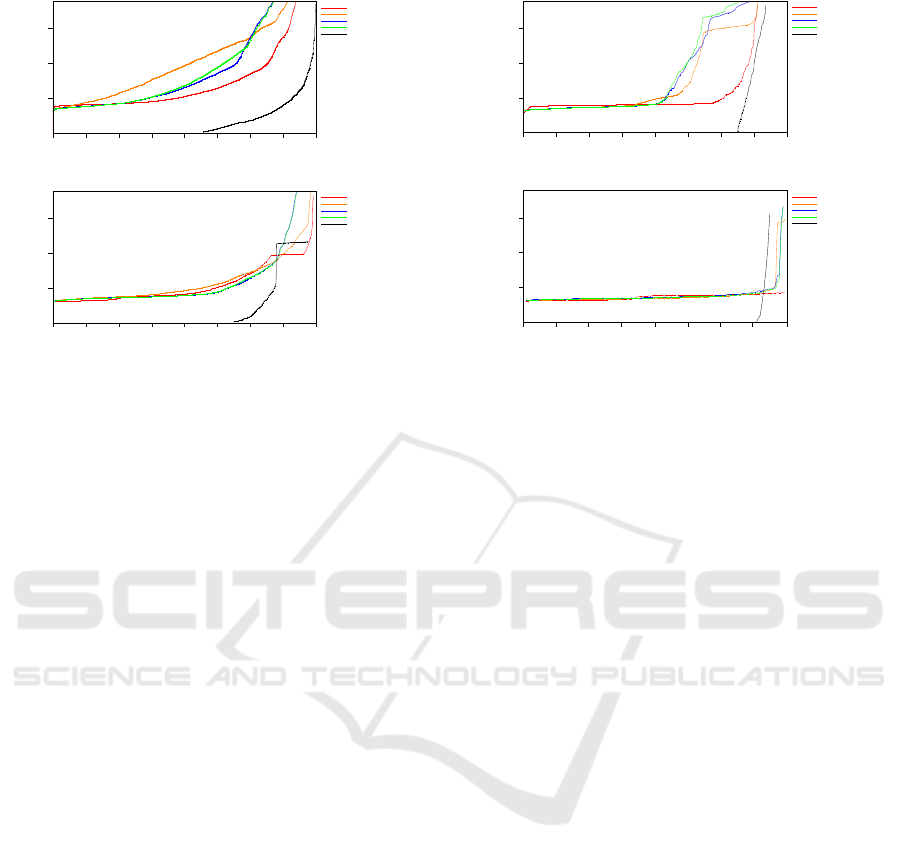
TO valid
TI grounded with plan
TI grounded
TI lifted
Original
Planning
10
0
10
1
10
2
0 1370 2740 4110 5480 6850 8220 9590 10961
runtime in seconds
number of plans
TO invalid
TI grounded with plan
TI grounded
TI lifted
Original
Planning
10
0
10
1
10
2
0 175 351 527 703 878 1054 1230 1406
runtime in seconds
number of plans
Figure 1: Runtime of verifiers on totally ordered domains.
classical, i.e., non-hierarchical planning. For HTN
planning, Behnke et al. (Behnke et al., 2020) pre-
sented a technique for grounding. It comprises a four
step process. Firstly, they overapproximate the meth-
ods, compound tasks, and actions that are reachable
from the goal task G. This is done by a depth first
search where they consider only the possible ranges of
parameter values and not the values themselves. Sec-
ondly, they perform a standard delete-relaxed reach-
ability analysis over the actions that were reachable
in the first step. The set of reachable ground actions
then forms the basis for the further grounding steps.
Thirdly, they perform a bottom up composition anal-
ysis similar to parsing. For any method, if all its sub-
tasks are ground reachable, then a ground instantia-
tion of the method and its compound task is created.
This process is repeated if new combinations of pa-
rameters for grounding are possible – similar as in
parsing. Lastly, they perform a top-down search pass
from G to remove all composed methods that are not
reachable from the goal task. This may eliminate ac-
tions, methods, and compound tasks from the ground-
ing. Steps two to four are repeated until convergence.
We expect that grounding the planning problem
prior to plan verification is algorithmically benefi-
cial. Since the grounding procedure has to perform
fewer checks (it, e.g., ignores ordering constraints
completely) it is much more efficient to execute. But
grounding may produce more tasks and action in-
stances than the parsing-based verifier – which takes
more domain constraints into account and can thus
perform a stricter pruning. On the other hand, the
grounder’s top down reachability analysis could prune
a significant number of tasks. Therefore once com-
puted grounding should enable the verifier to con-
PO valid
TI grounded with plan
TI grounded
TI lifted
Original
Planning
10
0
10
1
10
2
0 151 302 453 604 755 906 1057 1209
runtime in seconds
number of plans
PO invalid
TI grounded with plan
TI grounded
TI lifted
Original
Planning
10
0
10
1
10
2
0 17 34 51 69 86 103 120 138
runtime in seconds
number of plans
Figure 2: Runtime of verifiers on partially ordered domains.
sider even fewer task instances than without it. With
grounding, the parsing-based verifier is more efficient
as it does not have to consider parameters. Given
the once performed grounding, the parsing-based ver-
ifier can benefit from the information contained in the
grounding, i.e., in the non-reachable tasks.
For plan verification, we can however do more
than just grounding the planning problem. Before
grounding, we already know what we want to use the
grounding for: for verifying a plan. As such, any ac-
tion that is in the grounding but not in the plan can
safely be ignored – if the goal task would lead us to
such actions, the resulting plan cannot possibly be the
one we want to verify. To integrate this knowledge
into grounding, we ignore all actions that are not part
of the plan in step two of the grounding procedure.
4 IMPLEMENTATION
IMPROVEMENTS
To discover how we can improve the parsing-based
approach, we first further analyzed the results of the
latest comparison with the other approaches provided
by Ondr
ˇ
ckov
´
a et al. (Ondr
ˇ
ckov
´
a et al., 2022). We no-
ticed a group of domains on which the parsing-based
approach doesn’t perform very well. For example
on domains Minecraft-Regular and Minecraft-Player
(Ondr
ˇ
ckov
´
a et al., 2022) the parsing-based approach
cannot solve a single instance within the time limit.
The shortest plan in these domains has 35 actions.
For the domain Rover-GTOHP the parsing-based ap-
proach was able to solve roughly only half of the in-
stances in time, compared to the planning-based one.
We did some additional testing to discover the reason
On the Impact of Grounding on HTN Plan Verification via Parsing
95
behind this performance. One problem was checking
whether a task is new after task creation. The check
is necessary as it’s possible that through multiple de-
compositions, we might find a task that has the same
parameters and decomposes into the same actions.
The original parsing-based approach used an inef-
ficient structure to store already created tasks. This
meant that it took O(n) steps (where n is the number
of tasks) for each check. We have changed the struc-
ture to a hash-set structure which allows taking only
O(1) steps for each check. We then looked at other
structures and analyzed whether it would also be ben-
eficial to change them into a hash-set. We changed
the structure containing conditions for each slot and a
structure containing partially instantiated methods.
5 EMPIRICAL EVALUATION
In this section we will present a comparison between
our improved verifiers, the original and the planning-
based verifier. We will not be comparing our veri-
fiers against the SAT verifier. This is because previ-
ous versions of the parsing-based approach were al-
ready shown to outperform it on the benchmark set
we use (Bart
´
ak et al., 2020).
We ran our experiments on Intel Xeon Gold 6130
with 8GB of RAM. We ran our verifiers on 13714
instances which were already used in previous eval-
uations of HTN plan verifiers (Bart
´
ak et al., 2021a;
H
¨
oller et al., 2022; Ondr
ˇ
ckov
´
a et al., 2022). We
split these instances into four groups based on their
validity and ordering: to-valid (totally ordered do-
mains with valid plans), po-valid (partially ordered
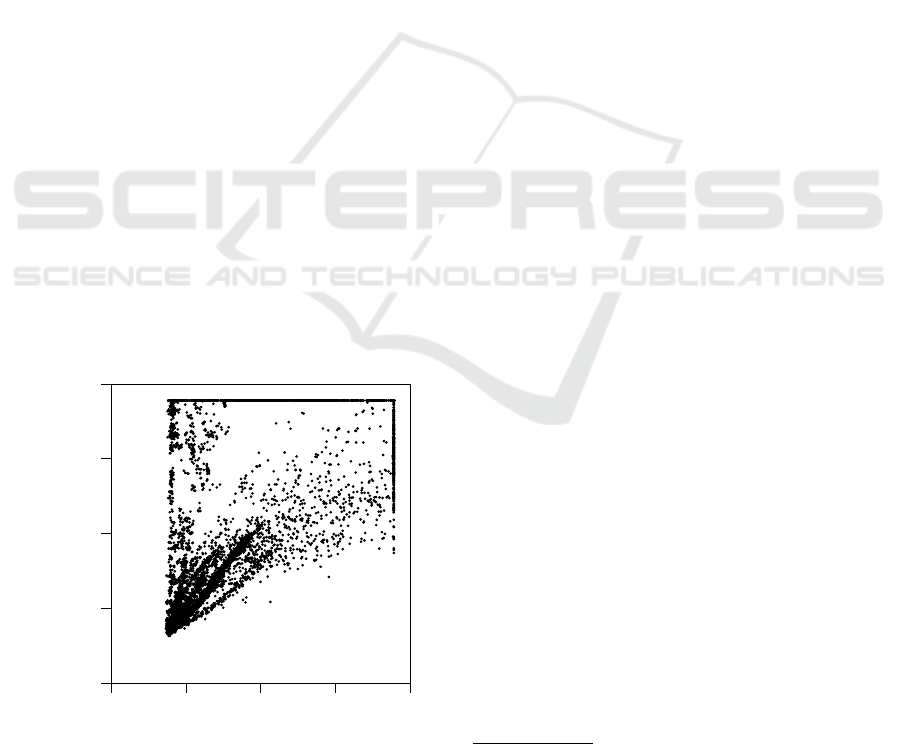
10
−1
10
0
10
1
10
2
10
3
10
−1
10
0
10
1
10
2
10
3
TI lifted
runtime in seconds
runtime in seconds
TI grounded with plan
Figure 3: Runtimes of the parsing-based verifier on the
grounded (TI grounded with plan, x-axis) vs the lifted (TI
lifted, y-axis) instances.
domains with valid plans), to-invalid (totally ordered
domains with invalid plans), and po-invalid (partially
ordered domains with invalid plans). The instances
for all four groups of plans stem mostly from the
Planning Competition (IPC) 2020 and were comple-
mented with plans generated by non-competing plan-
ners on the same domains
1
. They generated these
instances by the planners in the IPC on the IPC do-
mains
2
and on domains that were submitted but not
selected for the IPC
3
.
We ran the experiments on five verifiers: Orig-
inal, TI lifted, TI grounded, TI grounded with plan
and Planning. Original is the original parsing-based
verifier as presented in paper by Ondr
ˇ
ckov
´
a et al.
(Ondr
ˇ
ckov
´
a et al., 2022). The TI lifted approach is
the parsing-based approach extended by our imple-
mentation improvements. Note that the TI grounded
approach is the TI lifted approach, but it is used on
grounded domains. The TI grounded approach uses
a grounder that does not take the plan to verify into
account, while TI grounded with plan does. Finally
Planning is the planning-based approach described in
the paper by H
¨
oller et al. (H
¨
oller et al., 2022). The
Planning approach uses grounding with knowledge
of the plan. In order to ground the domain we use
the grounder described in the Grounder section.
The Planning approach, the TI grounded approach
and TI grounded with plan approach use grounded
domains. The time needed to ground the domains
is included in the total time of the verifiers. We ran
the experiments on instances with a given goal task
as the Planning approach needs a goal task as input.
We used a time limit of 10 minutes. Table 1 shows
the number of instances solved within this time limit
for each verifier. Boldness in tables shows which ap-
proach solves most instances.
Let us first look at the performance of the TI lifted
verifier. As we can see in Table 1 TI lifted solves
around the same number of instances (less than 0.5%
difference) as the Original for all groups except the
po-valid group. In the po-valid group the approach
solves additional 47 instances (around 3.9% of the in-
stances). We can also see in Figure 2 that the TI lifted
approach (blue line) is faster on the po-valid group
than the original approach (green line). The speed is
comparable in every other group.
Next, let us look at the performance of the TI
grounded approach. First, we will compare it to the
Original approach. The TI grounded consistently
solves more instances than the original approach in
1
https://github.com/panda-planner-dev/ipc-2020-plans
2
https://github.com/panda-planner-dev/ipc2020-
domains
3
https://github.com/panda-planner-dev/domains
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
96

every single group. We believe, this is because the
grounding prunes the number of tasks the parsing-
based verifier has to create (more on this below). It
solves additional 590 instances of to-valid instances,
which is over 5.38%. When it comes to to-invalid it
solves additional 76 instances, which is 5.4%. For
po-valid instances it solves additional 82 instances
(6.78%). Finally, for po-invalid it solves one extra in-
stance (0.72%). This is mainly because the Original
approach already performs very well on the po-invalid
domains and can solve over 98% of instances.
In total the TI grounded approach solves 12,351
(90.06%) instances, while the Original solves 11,602
(84.6%) out of 13,714 instances. This is a difference
of 749 instances (5.46% of all instances).
The grounding process introduces an overhead
(compared to the original approach) that can be seen
in Figures 1 and 2. We believe, the overhead is caused
by the time needed to run the grounder and the size of
the domain. The original domain has certain num-
ber of lifted methods and tasks. But for every single
grounding of each method/task the grounder creates
a new method/task. This can cause the number of
methods and tasks to increase significantly. We be-
lieve that the main cause of the overhead is the size
of the domain. This overhead is a especially preva-
lent on totally ordered valid domains. However, once
the plans get big or difficult enough, the grounding
benefits outweigh the overhead, and the TI grounded
approach outperforms the Original approach.
Let us look at the TI grounded with plan approach.
The TI grounded with plan approach outperforms
(when looking at number of instances solved) the TI
grounded approach on both totally ordered groups,
while it performs the same in partially ordered groups.
The biggest difference is in the to-valid domains
where it solves additional 343 instances (3.12% of
the instances). In total the TI grounded with plan
solves 12,706 instances (92.6%), compared to the TI
grounded’s 12,351 and the Original’s 11,602.
As can be seen in Figures 1 and 2 TI grounded
with plan approach also solves most instances faster
than the TI grounded approach. We believe this is be-
cause the grounding with the plan knowledge makes
the grounded domain smaller by removing methods
that would decompose into actions that can be safely
ignored (as explained in the Grounder section).
If we look at the speed of the TI grounded with
plan and the Original approach, we can see that the TI
grounded with plan is faster on to-valid domains. In
every other group the TI grounded with plan approach
performs similarly on easily solvable plans (for to-
invalid domains slightly worse) but becomes signif-
icantly faster on difficult plans.
Next let us compare the TI grounded with plan
and TI lifted approach. The TI grounded with plan
approach outperforms the TI lifted approach (in num-
ber of instances solved) in every group. However we
discovered that there exist domains that the TI lifted
approach is able to solve in time but the TI grounded
with plan approach is not. In Table 2 we can see
the number of instances that only one of the two ap-
proaches solves and the number of instances in which
one of them is faster. This suggests a possible area
for future work, where we could try to analyze the
domain before the verification begins to determine
whether grounding would be beneficial. Then based
on the results we would perform the grounding or not.
In Figure 3 we show the scatterplot of the runtime
for TI grounded with plan and TI lifted approach. As
shown in Table 2 the lifted approach solves more in-
stances faster for the totally ordered valid domains,
while the grounded approach outperforms it on par-
tially ordered domains and invalid domains.
Let us now look at the performance on specific do-
mains. Table 3 details all the domains for the to-valid
group and the verifiers’ performance on them. The
table also shows the length of the shortest unverified
plan with the TI grounded with plan approach. Table 4
provides information about length of the plan verified
with the TI grounded with plan approach and run-time
statistics per domain including Pearson correlation of
the run-time with the plan length.
Most of the instances that the lifted approach
solves and the grounded approach does not in to-
valid group comes from Logistics-Learned-ECAI-16
domain. We believe this is because the grounding in-
creases the size of the domain significantly.
Let us now look at the Minecraft-Player and
Minecraft-Regular domains, where the Original ap-
proach wasn’t able to solve a single instance in time.
As can be seen in Table 3 the TI grounded approach
is able to solve 24 instances and 546 instances which
is 32% and 71% of the domains’ instances and TI
grounded with plan can solve 74 instances (98.6%)
and 568 (74.1%) instances. In the Minecraft-Player
domain we were able to go from no instances solved
to essentially all instances solved (all but one). We be-
lieve that the reason for such increase in performance
in these two domains is that the grounder’s top down
analysis helps prune significant amount of tasks.
To confirm our hypotheses we ran some additional
tests on the Minecraft domain on a laptop with 32GB
of memory. We took the smallest instance of the
Minecraft-Regular domain and we performed a re-
laxed top down pruning pass and then a bottom up
analysis of the grounder. Without it the instance is
not groundable as the laptop runs out of memory.
On the Impact of Grounding on HTN Plan Verification via Parsing
97
Table 4: Per domain statistics for to-valid, with plan length information and runtimes for the TI grounded with plan approach.
Domain Plan Length Runtime for Verified (TI grounded with plan) Pearson
Min–Max Avg Median Min–Max Avg Median Correlation
AssemblyHierarchical 4 – 256 31.1 14 0.54 – 1.95 0.7 0.63 0.953
Barman-BDI 10 – 1198 128.4 69 0.58 – 396.2 12.0 0.78 0.131
Blocksworld-GTOHP 21 – 6661 482.3 209.5 0.55 – 284.46 13.5 1.335 0.358
Blocksworld-HPDDL 20 – 5732 461.1 163 0.57 – 543.35 17.7 1.22 0.853
Childsnack 50 – 2500 119.8 80 0.59 – 67.69 1.2 0.73 0.948
Depots 15 – 971 129.1 92 0.56 – 27.16 1.5 0.72 0.989
Elevator-Learned-ECAI-16 10 – 2165 225.1 200 0.05 – 585.06 6.4 1.83 0.804
Entertainment 24 – 128 71.7 64 0.62 – 1.1 0.8 0.77 0.688
Factories-simple 15 – 2968 623.7 251 0.59 – 375.41 42.8 1.63 0.017
Freecell-Learned-ECAI-16 57 – 489 162.7 138.5 0.86 – 7.8 1.6 1.305 0.901
Hiking 26 – 174 70.8 72 0.58 – 1.93 0.8 0.76 0.947
Logistics-Learned-ECAI-16 27 – 2813 413.1 370 0.6 – 586.09 47.6 2.87 0.405
Minecraft-Player 35 – 278 51.9 44 1.18 – 173.79 5.0 2.525 0.955
Minecraft-Regular 35 – 9947 253.8 135 0.87 – 585.05 74.2 43.315 0.222
Monroe-Fully-Observable 3 – 96 41.5 39 0.56 – 0.91 0.7 0.675 0.348
Monroe-Partially-Observable 6 – 91 45.1 45 0.6 – 0.83 0.7 0.68 0.458
Multiarm-Blocksworld 20 – 543 182.1 124 0.6 – 276.79 5.3 1.24 -0.187
Robot 2 – 1725 272.4 37 0.58 – 314.89 16.5 0.645 0.704
Rover-GTOHP 16 – 2640 320.7 212 0.57 – 79.46 3.5 1.42 0.921
Satellite-GTOHP 12 – 1584 379.1 270 0.59 – 448.76 29.8 2.165 0.708
Snake 2 – 162 20.6 16 0.55 – 1.83 0.7 0.64 0.918
Towers 1 – 131071 15419.1 511 0.59 – 268.75 28.9 0.72 0.900
Transport 8 – 5077 188.9 76 0.58 – 423.18 4.5 0.7 0.665
Woodworking 3 – 219 57.5 25 0.54 – 2.98 1.0 0.68 0.991
With the relaxed top-down reachability enabled,
this resulted in 5,093 grounded tasks (includes both
primitive and abstract tasks and instances of method
preconditions) and 3,184 grounded methods. Then
we ran the top down pruning. After this the domain
has 300 grounded methods and 454 grounded tasks.
So we were able to reduce the number of grounded
tasks and methods by a factor of 10.
We did another test on a middle sized instance.
Here the number of grounded methods after the first
pass is 67,014 and the number of grounded tasks
is 116,983. After the top down pruning we get
2,395 methods and 3,609 tasks. These results are
for grounding without a plan knowledge. Finally,
we ran one more test on the smallest instance using
the grounder with plan knowledge. The number of
grounded methods after the first pass is 987 and the
number of tasks is 2,958. After the top down prun-
ing we get 252 methods and 382 tasks. This supports
our other hypotheses that the grounding with a plan
outperforms the grounding without a plan knowledge,
because the verifier must check fewer tasks/methods.
In Rover-GTOHP (to-valid) domain, the Original
approach only solves 264 instances (51.8%), the new
TI grounded with plan can solve all of them.
Figure 2 shows an interesting result. Four of the
five approaches struggle with the 15 most difficult
plans in po-invalid group. They increase in run-time
significantly or in some cases are even unable to solve
them (Planning approach – last 9). However the TI
grounded with plan approach can solve all of them
but one and its increase in run-time is negligible.
Finally, let us look at the TI grounded with plan
and Planning approach. Table 1 shows that the TI
grounded with plan solves more instances than the
Planning approach on invalid but not on valid do-
mains. This makes sense because the parsing-based
approach works similarly to breadth-first search. It
will create all possible tasks of a layer before it moves
to the next one. So by the time it finds the goal task in
layer n, it will create all possible tasks of lower lay-
ers. The Planning approach does not work this way
so it might be able to find a solution quicker. How-
ever when it comes to invalid domains the Planning
approach also has to try all the options. This suggest
an idea for future work. We could adjust the parsing-
based approach to use heuristics in order to create
tasks that seem promising and then further build upon
them instead of building all tasks of a particular layer.
6 CONCLUSIONS
We set a goal to improve the parsing-based approach
with two sub-goals: create an improved version of the
verifier and use grounding to increase performance.
We succeeded and created an improved verifier TI-
lifted and used it on lifted and grounded domains.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
98

We empirically compared our new verifier, the
original parsing-based verifier and the state-of-the-art
planning-based verifier. The results have shown that
the improved verifier on grounded domains outper-
forms the original parsing-based approach on all four
tested groups. It also outperforms the planning-based
approach on invalid, but it is worse on valid domains.
The experiments showed us where we could fur-
ther improve the parsing-based approach. We now
have two possible areas for future work. First, a pos-
sible check for whether grounding could be benefi-
cial before running it. This would allow us to marry
the benefits of lifted and grounded domains. Second,
the use of heuristics to first create tasks that look the
most promising instead of creating them in a manner
similar to breadth-first search. This could allow us to
avoid creating a significant number of tasks.
ACKNOWLEDGEMENTS
Research is supported by TAILOR, a project funded
by EU Horizon 2020 research and innovation pro-
gramme under GA No 952215. S. Ondr
ˇ
ckov
´
a is (par-
tially) supported by SVV project number 260 575 and
by the Charles University project GA UK number
280122.
REFERENCES
Bart
´
ak, R. and Maillard, A. (2017). Attribute grammars
with set attributes and global constraints as a unify-
ing framework for planning domain models. In PPDP
2017, pages 39–48. ACM.
Bart
´
ak, R., Maillard, A., and Cardoso, R. C. (2018). Val-
idation of hierarchical plans via parsing of attribute
grammars. In ICAPS 2018, pages 11–19. AAAI Press.
Bart
´
ak, R., Ondr
ˇ
ckov
´
a, S., Behnke, G., and Bercher, P.
(2021a). On the verification of totally-ordered HTN
plans. In ICTAI 2021, pages 263–267. IEEE.
Bart
´
ak, R., Ondr
ˇ
ckov
´
a, S., Behnke, G., and Bercher, P.
(2021b). Correcting hierarchical plans by action dele-
tion. In KR 2021, pages 99–109. IJCAI.
Bart
´
ak, R., Ondr
ˇ
ckov
´
a, S., Maillard, A., Behnke, G., and
Bercher, P. (2020). A novel parsing-based approach
for verification of hierarchical plans. In ICTAI 2020,
pages 118–125. IEEE.
Behnke, G., H
¨
oller, D., Bercher, P., and Biundo, S. (2016).
Change the plan – How hard can that be? In ICAPS
2016, pages 38–46. AAAI Press.
Behnke, G., H
¨
oller, D., and Biundo, S. (2015). On the com-
plexity of HTN plan verification and its implications
for plan recognition. In ICAPS 2015, pages 25–33.
AAAI Press.
Behnke, G., H
¨
oller, D., and Biundo, S. (2017). This is a
solution! (... but is it though?) - verifying solutions
of hierarchical planning problems. In ICAPS 2017,
pages 20–28. AAAI Press.
Behnke, G., H
¨
oller, D., Schmid, A., Bercher, P., and Bi-
undo, S. (2020). On succinct groundings of HTN
planning problems. In AAAI 2020, pages 9775–9784.
AAAI Press.
Bercher, P., Alford, R., and H
¨
oller, D. (2019). A survey on
hierarchical planning – one abstract idea, many con-
crete realizations. In IJCAI 2019, pages 6267–6275.
IJCAI.
Bercher, P., Behnke, G., Kraus, M., Schiller, M., Manstet-
ten, D., Dambier, M., Dorna, M., Minker, W., Glimm,
B., and Biundo, S. (2021). Do it yourself, but not
alone: Companion-technology for home improvement
– bringing a planning-based interactive DIY assistant
to life. K
¨
unstliche Intelligenz – Special Issue on NLP
and Semantics, 35:367–375.
Bercher, P., Lin, S., and Alford, R. (2022). Tight bounds for
hybrid planning. In IJCAI-ECAI 2022, pages 4597–
4605. IJCAI.
Erol, K., Hendler, J. A., and Nau, D. S. (1996). Complexity
Results for HTN Planning. Annals of Mathematics
and AI, 18(1):69–93.
Fikes, R. E. and Nilsson, N. J. (1971). STRIPS: A new ap-
proach to the application of theorem proving to prob-
lem solving. In IJCAI 1971, pages 608–620.
H
¨
oller, D., Behnke, G., Bercher, P., and Biundo, S. (2014).
Language classification of hierarchical planning prob-
lems. In ECAI 2014, pages 447–452. IOS Press.
H
¨
oller, D., Behnke, G., Bercher, P., and Biundo, S. (2016).
Assessing the expressivity of planning formalisms
through the comparison to formal languages. In
ICAPS 2016, pages 158–165. AAAI Press.
H
¨
oller, D., Wichlacz, J., Bercher, P., and Behnke, G. (2022).
Compiling HTN plan verification problems into HTN
planning problems. In ICAPS 2022, pages 145–150.
AAAI Press.
Howey, R. and Long, D. (2003). VAL’s Progress: The Auto-
matic Validation Tool for PDDL2.1 used in the Inter-
national Planning Competition. In ICAPS’ Workshop
on the Competition: Impact, Organization, Evalua-
tion, Benchmarks 2003.
Kaelbling, L. P. and Lozano-P
´
erez, T. (2011). Hierarchical
task and motion planning in the now. In IROS 2011,
pages 1470–1477. IEEE.
Lin, S., Behnke, G., Ondr
ˇ
ckov
´
a, S., Bart
´
ak, R., and Bercher,
P. (2023a). On total-order HTN plan verification with
method preconditions – an extension of the CYK pars-
ing algorithm. In AAAI 2023. AAAI Press.
Lin, S., Grastien, A., and Bercher, P. (2023b). Towards au-
tomated modeling assistance: An efficient approach
for repairing flawed planning domains. In AAAI 2023.
AAAI Press.
Mohr, F., Wever, M., and H
¨
ullermeier, E. (2018). ML-
plan: Automated machine learning via hierarchical
planning. Machine Learning, 107(8):1495–1515.
Ondr
ˇ
ckov
´
a, S., Bart
´
ak, R., Bercher, P., and Behnke, G.
(2022). On heuristics for parsing-based verification of
hierarchical plans with a goal task. In FLAIRS 2022.
On the Impact of Grounding on HTN Plan Verification via Parsing
99
