
Fast Eye Detector Using Siamese Network for NIR Partial Face Images
Yuka Ogino
1
, Yuho Shoji
1
, Takahiro Toizumi
1
, Ryoma Oami
1
and Masato Tsukada
2
1
NEC Corporation, Kanagawa, Japan
2
University of Tsukuba, Ibaraki, Japan
Keywords:
Eye Detection, Object Detection.
Abstract:
This paper proposes a fast eye detection method that is based on a Siamese network for near infrared (NIR)
partial face images. NIR partial face images do not include the whole face of a subject since they are captured
using iris recognition systems with the constraint of frame rate and resolution. The iris recognition systems
such as the iris on the move (IOTM) system require fast and accurate eye detection as a pre-process. Our
goal is to design eye detection with high speed, high discrimination performance between left and right eyes,
and high positional accuracy of eye center. Our method adopts a Siamese network and coarse to fine position
estimation with a fast lightweight CNN backbone. The network outputs features of images and the similarity
map indicating coarse position of an eye. A regression on a portion of a feature with high similarity refines
the coarse position of the eye to obtain the fine position with high accuracy. We demonstrate the effective-
ness of the proposed method by comparing it with conventional methods, including SOTA, in terms of the
positional accuracy, the discrimination performance, and the processing speed. Our method achieves superior
performance in speed.
1 INTRODUCTION
Iris and periocular recognition (J.Daugman, 2006),
pupillometry (H.Wilhelm, 2003; D.Couret, 2016),
and gaze tracking (Y.Cheng, 2021) are used for iden-
tifying individuals and human state estimation from
near infrared (NIR) images. These methods require
high resolution to capture the fine texture of irises
from moving subject. In iris capturing systems, the
field of view is limited to the both eye area only due
to the constraint of resolution. CASIA-Iris-M1 (Tan,
2012b) and CASIA-Iris-Distance (Tan, 2012a) (ex-
amples in Fig. 1, and Fig. 3), public datasets for iris
recognition, are good examples. These datasets were
created using mobile devices and iris imaging systems
at a distance (IAAD (Nguyen, 2017)). These images
are partial face images, which include both eyes but
not an entire face. The iris-recognition process using
these partial face images first detects and classifies a
right eye and a left eye respectively, then extract iris
regions by segmentation on single eye images, and fi-
nally extract features from them for authentication.
In particular, Iris On the Move (IOTM) (J.Matey,
2006) system, an iris authentication system for a
walking individual, requires a high frame rate. High
frame rate increases the chances of capturing focused
irises from a walking individual passing through the
narrow depth of field reduced by the constraints of
high resolution. Recent IOTM system (K.Zhang,
2020) captures in 30 fps with 12M pixels. For real
time processing of iris recognition in this system, the
processing time for eye detection is required faster
than 33 msec. The IOTM system requires a wide hori-
zontal angle of view to expand width of walking path-
way. The position of the face in the captured image
is greatly shifted due to individual differences in gait
and walking position, so the eyes do not always ap-
pear in the same position in images (examples in Fig.
1). A technique to detect each eyes with high speed
and positional accuracy from NIR partial face images
is expected.
In iris recognition, and certain gaze-tracking
methods, precise eye landmark detectors (J.H.Choi,
2019; A.Ablavatski, 2020; N.Y.Ahmed, 2021;
K.I.Lee, 2020) have been proposed for estimating
gaze direction and segmentation of the pupil and iris
regions. These methods first detect the rectangle face
region (bounding box) from the input image and crop
the single eye regions from the bounding box using
landmark detection. Landmark detection is a method
of detecting a set of landmark points representing fa-
cial parts such as eyes, nose, and mouth. Finally, iris-
landmark estimations and iris segmentations are exe-
cuted for a single eye region.
Ogino, Y., Shoji, Y., Toizumi, T., Oami, R. and Tsukada, M.
Fast Eye Detector Using Siamese Network for NIR Partial Face Images.
DOI: 10.5220/0011617700003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 5: VISAPP, pages
419-428
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
419
SiamEDP (Proposed)
Conditional facial-landmark-detection (Open Face 2.0)
Input images
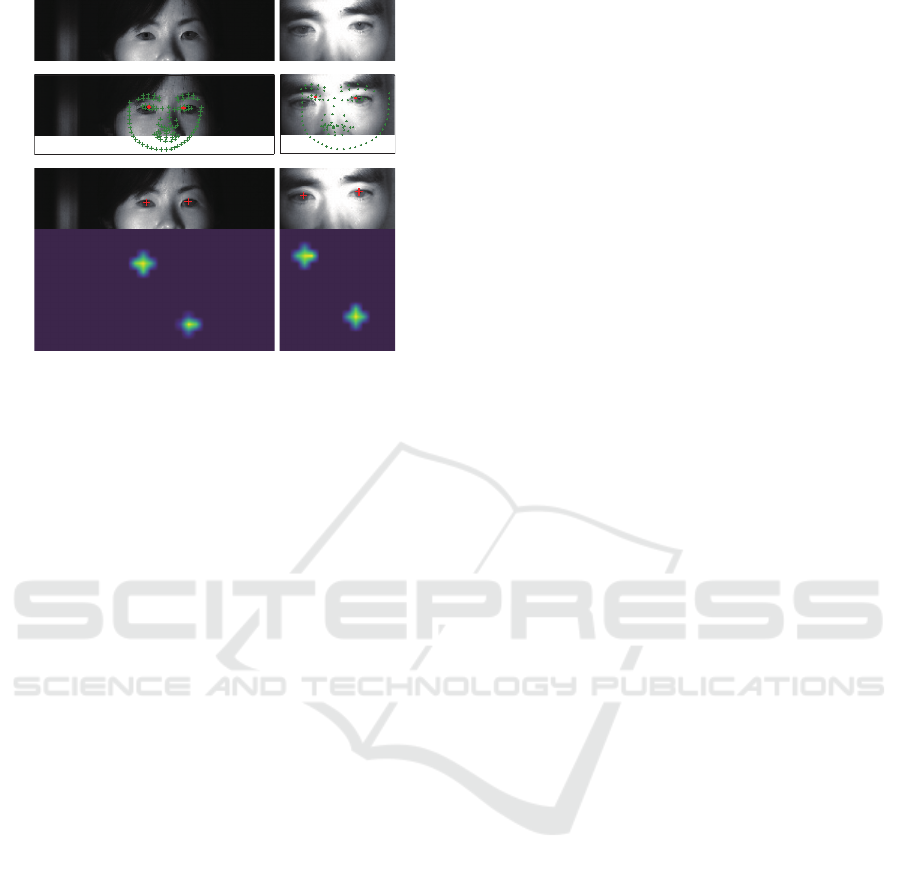
Figure 1: Examples of NIR partial face images and detec-
tion results. First row shows input images. Left image
was captured with iris on the move (IOTM) system, and
right image is from public iris dataset CASIA-Iris-M1-S2
(Tan, 2012b). Second row shows results of OpenFace2.0
(T.Baltrusaitis, 2018) (face detection + landmark detection).
Third row shows results of proposed method. Last two rows
show heat maps indicates right and left eye similarity of ref-
erence features generated from SiamEDP.
Current face-detection (N.Dalal, 2005; D.E.King,
2015; J.Deng, 2020; V.Bazarevsky, 2019; J.Xiang,
2017) and facial-landmark-detection methods
(V.Kazemi, 2014; X.Guo, 2019; Y.Kartynnik, 2019;
A.Zadeh, 2017) are fast and accurate. These detection
methods improved performance of occlusions. These
occlusions indicate that a face is shielded by objects
such as a mask, or another person’s face. In other
words, the target image contains objects on the face,
which is different from the partial face in which
some parts of the face is out of the angle of view.
Landmark detection methods does not assume the
partial face image, since the input is a fixed resized
face region obtained by face detection. Moreover,
these detectors are trained using images captured
under visible light and including whole face, so the
pre-trained model cannot be used for NIR partial face
images. Annotation of many landmark points such as
facial bounding box, eyes, contours, eyebrows and
nose, for a NIR partial-face dataset requires a great
deal of effort.
Direct eye-detection methods, such as object-
detection methods, have also been proposed (S.Ren,
2015; A.Bochkovskiy, 2020). Generic object detec-
tion methods (L.Liu, 2020) extract features from the
input image and regress object classes and bounding
boxes from the features to detect objects in different
classes and different scales. These systems are not
fast enough to meet the requirement for the real-time
performance of the iris recognition system.
We proposes a fast eye detection method for NIR
partial face images that is based on a Siamese net-
work (SiamEDP) and directly detects right and left
eye centers. We focused on a fully-convolutional
Siamese network (L.Bertinetto, 2016) (SiamFC) to
accurately obtain the eye center with a lightweight
model. The Siamese network extracts features from
two kind of images. One is a NIR partial face im-
age as a search image and the other is a single eye
image prepared in advance as a reference image.
SiamEDP outputs a coarse similarity heat map be-
tween the reference feature and the search feature.
Classification by similarity using the reference fea-
tures is expected to reduce training parameters, im-
prove discriminative performance between left and
right eyes, and stabilize training. We further ex-
tended the two-dimensional convolutional similarity
to cosine-margin-based loss (H.Wang, 2018) to im-
prove the performance. SiamEDP regresses a search
feature vector with a highest similarity, and obtain
the local fine position of the eye center. There-
fore, SiamEDP can detect coarse to fine eye-center
positions with high speed and accuracy. We eval-
uated the accuracy of SiamEDP, and demonstrated
the effectiveness of the Siamese network and cosine-
margin-based loss. We also compared it with cur-
rent facial-landmark-detection methods by using pub-
lic iris-recognition datasets. The results indicate that
SiamEDP is faster and more accurate than these two
types of methods.
Our main contributions are as follows:
• We propose an eye detector as a pre-process of
iris segmentation for partially cropped NIR face
image.
• We apply SiamFC(L.Bertinetto, 2016) for object
tracking to eye detection with a light weight net-
work.
• Using cosine-margin-based loss (Cos-
Face(H.Wang, 2018)) on training improves
accuracy of detection.
• Coarse to fine approach improves positional accu-
racy.
• Our method reduces the cost of annotation less
than facial-landmark detection. Only two land-
marks of eye center are required for a single face.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
420

2 RELATED WORK
2.1 Face and Landmark Based Eye
Detection
Eye-center or pupil-center detection methods have
been proposed for gaze tracking (Y.Cheng, 2021).
These methods first extract the face region using face
detection, then resize the region to a fixed size, ex-
tract the single eye regions using facial-landmark de-
tection, and execute high-precision position estima-
tion, or directly detect the single eye region from the
face region. Therefore, the accuracy of these methods
depends on the accuracy of the underlying face region
and facial-landmark detection.
Face detection methods predict the facial bound-
ing box. Early methods were mainly based on the
classifiers using hand-crafted features extracted from
an image (P.Viola, 2001). After the breakthrough of
the CNN, CNN based models were proposed, such
as Cascade-CNN, Faster-RCNN, and single-Shot De-
tection (H.Li, 2015; X.Sun, 2017; S.Zhang, 2017;
V.Bazarevsky, 2019; J.Deng, 2020). To improve
detection accuracy, several studies focused on the
loss function or multi-task learning (R.Ranjan, 2016;
J.Deng, 2020). Dent et al. (J.Deng, 2020) pro-
posed RetinaFace which predicts facial bounding box
by leveraging extra-supervised and self-supervised
multi-task learning and showed significant improve-
ment in accuracy. One of the challenges in face de-
tection is occlusion, i.e, the lack of facial information
due to obstacles or masks. Chen et al. (Y.Chen, 2018)
proposed the Occlusion-aware Face Detector (AOFD)
which detects faces with few exposed facial land-
marks using adversarial training strategy. The above
face-detection methods use annotated facial-image
datasets that include images captured under visible
light. Several visible-light face datasets are pub-
licly available. For example, WIDER FACE (S.Yang,
2016) includes more than 30,000 images and about 4
million labeled faces. There are several other datasets
containing hundreds to tens of thousands of labeled
faces. The majority of images are wide-angle shots of
the face (V.Jain, 2010; Y.Junjie, 2014; B.Yang, 2015;
H.Nada, 2018; Q.Cao, 2018).
Several of eye-detector and eye-center estimation
methods detect eyes from resized facial bounding
boxes. Some methods (N.Y.Ahmed, 2021; M.Leo,
2013) use statistical facial-landmark information for
cropping out single eyes before an eye segmentation
process in real time. The other method (M.D.Putro,
2020) uses a face region resized to 128 × 128 pixels
before a bounding-box estimation of eyes.
Facial-landmark-detection methods detect key
points that represent facial landmarks from facial
bounding boxes. Early landmark-detection meth-
ods were mainly based on fitting a deformable face
mesh by using statistical methods (N.Wang, 2018).
V. Kazemi et al, proposed ensemble of regression
trees which is based on gradient boosting initial-
ized with the mean shape of landmarks (V.Kazemi,
2014). They achieved high speed and high accu-
racy in detecting 68 points from frontal-face images
with less occlusion. CNN based landmark detec-
tors are also proposed, showing significant improve-
ment in in-the-wild facial-landmark detection (Y.Sun,
2013; E.Zhou, 2013; P.Chandran, 2020; K.Zhang,
2016; Z.Feng, 2018). The models of these meth-
ods are typically evaluated with 68 points using an-
notated visible-light-image datasets. Several datasets
(C.Sagonas, 2013; M.K
¨
ostinger, 2011; A.Burgos,
2013; W.Wu, 2018) are available. Each dataset in-
cludes several thousand of annotated images. For ex-
ample, the 300W (C.Sagonas, 2013) dataset contains
4437 images with 68 landmark annotations. AFLW
(M.K
¨
ostinger, 2011) contains 24386 images with 21
landmark annotations, COFW (A.Burgos, 2013) con-
tains 1852 images with 29 landmark annotations, and
WFLW (W.Wu, 2018) have 10000 images with 98
landmark annotations.
Several iris-landmark-detection methods
(J.H.Choi, 2019; K.I.Lee, 2020; A.Ablavatski,
2020) uses cropped single eye regions from facial-
landmark-detection results. Choi et al. (J.H.Choi,
2019) proposed segmentation based eye center
estimation. They cut out a rectangle region using the
landmarks of the eye socket and eye corner from 68
points of landmarks (V.Kazemi, 2014) before pupil
segmentation. Ablabatski et al. (A.Ablavatski, 2020)
detects 5 points of iris landmarks from a 64 × 64
single eye region from facial-landmark detection
(V.Bazarevsky, 2019) results.
Our assumption of NIR partial face image data
is images under intense NIR illumination, such as
CASIA-Iris-Distance (Tan, 2012a) and CASIA-Iris-
M1 dataset (Tan, 2012b). Since the modality of these
images is different from the visible light data set, the
pre-trained models of the above detection methods are
insufficient to provide accuracy. In addition, there
are currently hardly any public datasets with annota-
tions for near-infrared light face images. Therefore,
it is necessary to annotate facial bounding box and
landmark annotations on existing datasets. However,
these annotations are very costly for the task of eye
detection.
Fast Eye Detector Using Siamese Network for NIR Partial Face Images
421
Extract Argmax
Feature Vector
CosFace & BCE Loss
Lm
Feature
Extraction
Network
Regressor
Search Image
Reference
Feature
Search
Feature
L1 Loss
Lp
Spatial Cosine
Similarity
Similarity Heat Map
GT Binary Map
Extracted
Feature Vector
Right/Left (Flipped)
Eye Ref Image
(Average eye image)
Local Position
(dx, dy)
w
Coarse Position
x’
Final Eye Center
Position
x
Flow at testing
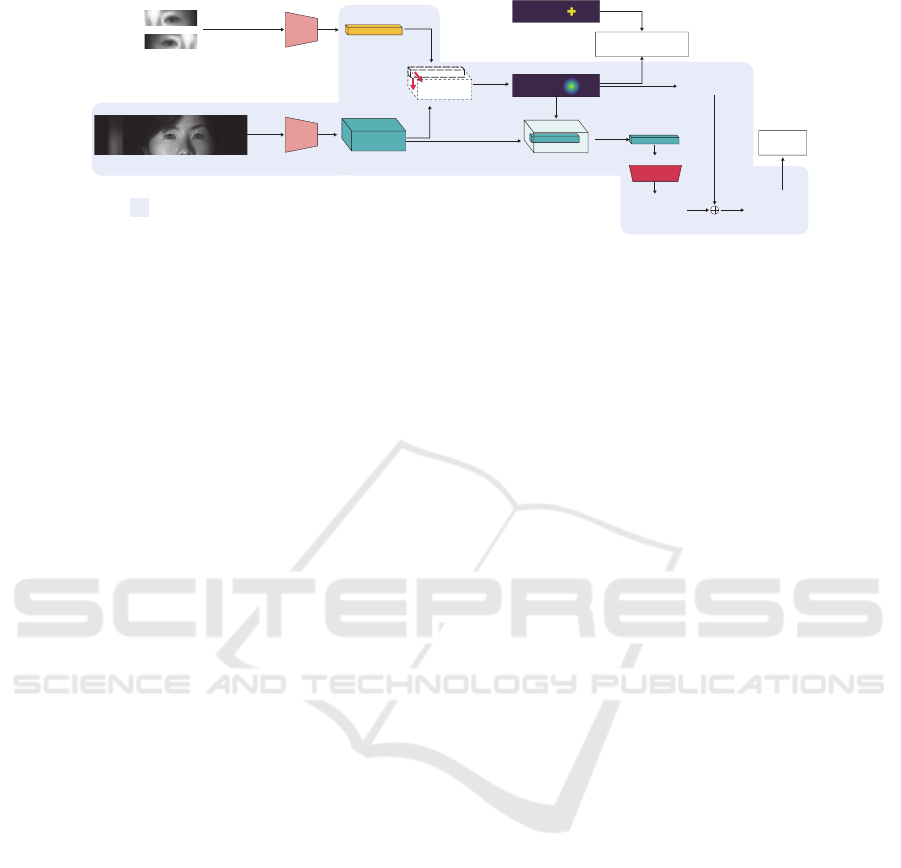
Figure 2: Framework of SiamEDP. Reference and search images are fed into same feature extractor. Heat map is generated by
calculating spatial cosine similarity between extracted features. Networks are optimized by the binary cross entropy (BCE)
loss with CosFace as shown in Eq. 4. Eye feature vector is extracted from similarity heat map, and regressor estimates fine
position in eye feature. Blue region shows testing framework. Detector computes spatial cosine similarity between extracted
search and pre-extracted reference features. Reference feature is saved as trained parameter.
2.2 Direct Eye Detection Methods
Methods have been proposed to detect eyes directly
from input images using CNN-based object detec-
tion (S.Ren, 2015; J.Redmon, 2018) without face and
landmark detection. These methods, called generic
object-detection methods (L.Liu, 2020), detect and
classify objects of different scales and classes.Faster
R-CNN (S.Ren, 2015) is one such method. It gen-
erates a feature map from an input image by using
convolutional layers and estimates regions of interest
(ROIs) with high objectness using a region proposal
network. Then, a fully connected layer outputs the
object class and bounding box of the ROIs. Nasaif et
al. (Nsaif, 2021) proposed FRCNN-GNB for eye de-
tection. It uses Faster R-CNN (S.Ren, 2015) to detect
the initial eye regions then applies Gabor filters and a
na
¨
ıve Bayes model for the final eye detection. Generic
object-detection methods tend to have weak discrim-
inability against similar classes such as right and left
eye class, and tend to increase processing time due
to the large size of the backbone to handle multiple
classes and multiple scales.
We focused on object tracking methods for fast
detection. Methods based on correlation filters or
Siamese networks have been proposed and are of-
ten used in the Visual Object Tracking (VOT) chal-
lenge (K.Matej, 2016). Certain eye detectors using
correlation filters have been proposed (D.S.Bolme,
2009; G.M.Araujo, 2014). Araujo et al. (G.M.Araujo,
2014) proposed a correlation-filter-based method in
the pixel domain. They use cosine similarity dur-
ing training to avoid the values outside the interval
[0, 1]. On the other hand, there is no eye detection
method using Siamese network. The well-known ob-
ject tracking method, SiamFC(L.Bertinetto, 2016) has
achieved high performance and speed in the VOT
challenge. It extracts features from input reference
and search images by using common networks. A
similarity score map is then generated using the cor-
relation of the extracted reference and search features.
SiamFC detects the position of a reference object in a
search image by thresholding the similarity heat map.
3 PROPOSED METHOD
3.1 Basic Idea
We consider SiamFC (L.Bertinetto, 2016) as two-
class classifier that determines whether a subregion
of a search feature is a tracking target. We consid-
ered applying cosine-margin-based loss, which is re-
cently used in metric learning. It is a method for
showing higher classification performance by embed-
ding features into a hypersphere and providing a mar-
gin for the same class on training. We apply Cos-
Face (H.Wang, 2018) to 2D convolution to improve
classification performance. The position of eye in
the heat map is rough because the resolution of heat
map is reduced by the stride setting of feature extrac-
tion CNN architecture. Therefore, we considered a
method to obtain a fine eye position using the coarsely
obtained eye positions. We designed the spatial size
of the search feature to be equal to the size of the heat
map, and there is a feature vector corresponding to
one pixel in the heat map. We assume a feature vector
with the highest similarity includes the information of
eye, and directly obtain the eye center coordinates by
regressing on the feature vector. This enables high-
speed and highly accurate eye detection.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
422

Table 1: Feature extraction network architecture.
input layer1 layer2 layer3 layer4
convlayer
3 × 3, 32
3 × 3, 32
3 × 3, 32
× 2
3 × 3, 64
3 × 3, 64
× 2
3 × 3, 128
3 × 3, 128
× 2
3 × 3, 128
3 × 3, 128
× 2
stride 2 stride 2 stride 1 stride 2 stride 1
3.2 Framework
We define reference image as I
re f
and search image
as I
srch
. The same CNN feature extractors φ calculate
features from these two images. The features of I
re f
and I
srch
are defined as f
re f
:= φ(I
re f
) ∈ R
m×n×c
and
F
srch
:= φ(I
srch
) ∈ R
M×N×c
, respectively. The num-
bers of channels c in F
srch
and f
re f
are equal, but each
has a different spatial size. Let F
srch
[u] ∈ R
m×n×c
de-
note the partial region of size m × n × c at spatial po-
sition u ∈ U of feature F
srch
.
Figure 2 shows the flow of SiamEDP. In training,
I
re f
is fixed to a single average image of eyes, and the
same image is flipped between the left and right eyes.
We assume that I
srch
always includes both eyes and
detection tasks for the left and right eyes are learned,
respectively. In testing, the same I
re f
as in training
is used to obtain both features f
re f R
and f
re f L
in ad-
vance. We define Q as the heat map generated by the
cosine similarity between F
srch
and f
re f
. We define
x
0
as the spatial position where argmaxQ, and extract
the feature vector f
eye
such that F
srch
[x
0
] ∈ R
1×1×c
.
The local position dx of the eye center in f
eye
is ob-
tained by regression on f
eye
and the final position is
estimated using x
0
and dx.
3.3 Coarse to Fine Eye Center
Estimation
SiamEDP calculates the kernel-wise cosine similarity
between F
srch
[u] and f
re f
, and obtains Q. The edge of
F
srch
is replicated before calculating the cosine sim-
ilarity so that Q has the same spatial size (M, N) as
F
srch
. The cosine similarity at spatial position u on Q
can be calculated as
Q[u] = cos θ
u
=
f
re f
· F
srch
[u]
|| f
re f
||
2
||F
srch
[u]||
2
. (1)
The spatial positionx
0
is highest in intensity in Q
as x
0
= [x
0
, y
0
]
T
= argmaxQ. The feature f
eye
repre-
senting the eye is denoted as
f
eye
= F
srch
[x
0
] ∈ R
c
. (2)
A local eye center position dx = [dx, dy] in the fea-
ture block f
eye
is obtained by linear regression using
weight parameters w ∈ R
2×c
as
dx =
dx
dy
= w f . (3)
Using x
0
, x and the size ratio of the input image to
the output similarity map α, the final eye position
coordinates x for the input image are obtained by
x = α(x
0
+ dx).
3.4 Loss Function
We define two types of loss functions. One is the loss
L
s
for the similarity map, and the other is the loss L
p
for the eye center coordinates. We design a loss func-
tion on the basis of binary cross entropy (BCE) with
CosFace (H.Wang, 2018) to accurately classify one
side of the eye (two classes) from others. CosFace
has a margin parameter m applied only to the posi-
tive label locations and a scale parameter s. These
parameters enables cosine decision margin between
classes. CosFace is expected to separate the feature
distribution of the right-eye class from that of the left-
eye class. The loss function L
s
based on the BCE is
given by
L
s
= −
1
|U|
∑
u∈U
{y
u
log
e
s(Q
u
−m)
e
s(Q
u
−m)
+ Σ
t6=u
e
sQ
t
+(1 − y
u
)log
e
sQ
u
e
s(Q
u
−m)
+ Σ
t6=u
e
sQ
t
}. (4)
The L
p
for fine eye center position is the L1 norm
expressed as
L
p
= Σ
p∈x
b · |p − ˆp| ·
1
α
, (5)
where α denotes the scale ratio between the input im-
age and similarity heat map. b denotes a mask to
avoid calculating regression losses for features with-
out eye information due to incorrect heat-map predic-
tions and defined as follows.
b =
1, i f ||x
0
−
ˆ
x
0
||
2
< 2
0, otherwize
, (6)
The above L
s
and L
p
are combined into a loss function
L using the weights β, γ as follows. We use a sum of
loss calculated from the right and left eyes.
L = βL
s
+ γL
p
. (7)
Fast Eye Detector Using Siamese Network for NIR Partial Face Images
423

Table 2: Dataset.
Name Number Training
CASIA-Iris-Distance (Tan, 2012a) 2567 60% in §4.1, §4.2
50% in §4.3
CASIA-Iris-M1-S1 (Tan, 2012b) 1400 60% in §4.1, §4.2
50% in §4.3
CASIA-Iris-M1-S2 (Tan, 2012b) 6000 0%
CASIA-Iris-M1-S3 (Tan, 2012b) 3600 0%
4 EXPERIMENTS AND RESULTS
We present three experiments we conducted evaluate
the performance of SiamEDP. The first was an abla-
tion study to confirm the contributions of SiamEDP
(SiamFC, cosine similarity and CosFace). The sec-
ond was a comparison between SiamEDP and current
facial-landmark-detection methods. The third was a
comparison between SiamEDP and generic object-
detection methods. We considered SiamEDP is pre-
processing for iris and pupil segmentations, so we did
not compare segmentation methods.
We used a single network architecture for all three
experiments. The base network for SiamFC was mod-
ified from ResNet (He, 2016) as shown in Table 1.
The differences from the original ResNet are sin-
gle channel input and the number of layers. Each
layer contained convolution, batch normalization and
rectified-linear-unit (ReLU) activation. For model
training, we used stochastic gradient descent (SGD)
as the optimizer. The learning rate was 0.1 on the first
epoch and switched to 0.01 from the second epoch.
The weight decay was 0.0001. The batch size was 16
for each iteration, and the total number of iterations
was 60,000.
We used four iris datasets, CASIA-Iris-Distance
(Tan, 2012a), CASIA-Iris-M1-S1(Tan, 2012b),
CASIA-Iris-M1-S2(Tan, 2012b), and CASIA-Iris-
M1-S3 (Tan, 2012b) described in Table. 2. We
manually annotated eye center points on all images.
The input image was scaled down from the original
size, with the resolution of the iris diameter at about
10 pixels. Therefore, the images of CASIA-Iris-M1-
S1 were rescaled to 1/10, the others were rescaled
to 1/16. Parameter α is the scale ratio between the
resized input image and similarity heat map and
is 8 because of the network stride in Table 1. The
ground truth heat map is a binary map labelled on the
eye-center pixel and its four neighboring pixels.
The evaluation metric was the root-mean-square
error (RMSE) of the eye-center position or the relative
error considering both eyes and expressed as
E =
max(d
l
, d
r
)
d
, (8)
where d is the Euclidean distance between the left-
and right-eye centers, where d
l
and d
r
are the RMSEs
of the right- and left-eye centers, respectively.
4.1 Ablation Study
In this experiment, we evaluated the performance of
selecting reference images, effectiveness of CosFace,
and that of the Siamese network. We selected CASIA-
Iris-Distance and CASIA-M1-S1 as training datasets
and used 60% of each training data set for training.
We first evaluated the effectiveness of the Cos-
Face parameters (s, m) and feature normalization and
estimated suitable parameters. For training without
reference images, we set the best parameters in the
evaluation of CosFace. We trained all models three
times, each with the same parameters and same train-
ing data, then averaged the results. The evaluation
was done using CASIA-M1-S2 and CASIA-M1-S3
datasets, which were not used for training.
We then evaluated the following three methods for
selecting reference images:
1. Random. 10% of the images in the training
dataset is selected as reference image data, and
eyes were randomly selected from them and used
as reference images during training. In the evalua-
tion, we used the average of the reference features
in a batch in the end of training as a reference fea-
ture.
2. Fixed Avg Image. The histogram-stretched im-
age averaged over 128 reference images is used as
the reference image. The reference average image
is fixed during the training and testing.
3. Without Ref Image. A heat map is learned di-
rectly from a search feature without using the ref-
erence image. Channel 2 and 1×1 convolution is
executed on the search features to directly output
the right- and left-eye heat maps. We applied Cos-
Face to this method and selected parameters from
the other methods.
The results are listed in Table 3. There was no sig-
nificant difference between random reference and avg
reference, and both methods significantly decreased
in accuracy when the features were not normalized.
We also found significant performance differences de-
pending on the presence or absence of s (same as
NormFace (F.Wang, 2017)). Without reference im-
ages, the learning was not stable, resulting in lower
accuracy.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
424

Table 3: Ablation Study.
ref image norm params (s,m) e ≤ 0.05 e ≤ 0.1 e ≤ 0.15 e ≤ 0.2 e ≤ 0.25 e ≤ 0.5
random 0.0001 0.0006 0.0037 0.0126 0.0287 0.2720
random norm (1,0) 0.4048 0.4098 0.4108 0.4122 0.4135 0.4147
random norm (30,0) 0.9850 0.9953 0.9964 0.9969 0.9972 0.9976
random norm (30,0.1) 0.9782 0.9947 0.9975 0.9983 0.9985 0.9990
random norm (30,0.2) 0.9839 0.9956 0.9981 0.9991 0.9994 0.9995
random norm (30,0.3) 0.9784 0.9936 0.9974 0.9988 0.9992 0.9994
fixed avg image 0.0000 0.0005 0.0023 0.0087 0.0272 0.1465
fixed avg image norm (1,0) 0.5171 0.6351 0.7062 0.7622 0.8181 0.9702
fixed avg image norm (30,0) 0.9866 0.9929 0.9940 0.9943 0.9947 0.9948
fixed avg image norm (30,0.1) 0.9899 0.9975 0.9985 0.9987 0.9988 0.9989
fixed avg image norm (30,0.2) 0.9776 0.9898 0.9917 0.9921 0.9924 0.9927
fixed avg image norm (30,0.3) 0.9798 0.9905 0.9918 0.9920 0.9922 0.9922
without ref image norm (30,0.1) 0.7509 0.7831 0.7876 0.7899 0.7919 0.8018
Table 4: Combinations of comparison methods. We evaluated 9 combinations from 4 face SDKs. Some facial-landmark-
detection methods do not detect eye centers; therefore, we used mean of points around eye.
Name ToolBox Face Detection Landmark Eye-center Evaluation
Dlib-5points Dlib (D.E.King, 2009) (N.Dalal, 2005) 5 points, (V.Kazemi, 2014) mean of 2 endpoints of eye
Dlib-68points Dlib (D.E.King, 2009) (N.Dalal, 2005) 68 points, (V.Kazemi, 2014) mean of 6 points around eye
Dlib-cnn-5points Dlib (D.E.King, 2009) (D.E.King, 2015) 5 points, (V.Kazemi, 2014) mean of 2 endpoints of eye
Dlib-cnn-68points Dlib (D.E.King, 2009) (D.E.King, 2015) 68 points, (V.Kazemi, 2014) mean of 6 points around eye
FaceX-Zoo-mask FaceX-Zoo (J.Wang, 2021) RetinaFace (J.Deng, 2020), 106 points, PFLD (X.Guo, 2019) point of eye center
(trained mask data)
FaceX-Zoo-non-mask FaceX-Zoo (J.Wang, 2021) RetinaFace (J.Deng, 2020) 106 points, PFLD (X.Guo, 2019) point of eye center
Mediapipe-iris Mediapipe (C.Lugaresi, 2019) BlazeFace (V.Bazarevsky, 2019) 468 points, FaceMesh (Y.Kartynnik, 2019) point of iris center
+ iris 5 points, (A.Ablavatski, 2020)
Mediapipe Mediapipe (C.Lugaresi, 2019) BlazeFace (V.Bazarevsky, 2019) 468 points, FaceMesh (Y.Kartynnik, 2019) mean of 100 points around eye
OpenFace2.0 OpenFace2.0 (T.Baltrusaitis, 2018) (J.Xiang, 2017) 68 face points, CE-CLM (A.Zadeh, 2017) mean of 8 points around pupil
+ 56 eye points, (E.Wood, 2015)
Table 5: Comparison of SiamEDP and facial-landmark-detection methods on CASIA-Iris-M1-S2. The face detection column
is the success rate of the face detection API returned bounding box.
Eye error RMSE
Dlib-5points
Dlib-68points
Dlib-cnn-5points
Dlib-cnn-68points
FaceX-Zoo-mask
FaceX-Zoo-non-mask
Mediapipe-iris
Mediapipe
OpenFace2.0
SiamEDP (proposed)
Face detection ≤ 0.05 ≤ 0.1 ≤ 0.25
0.0097 0.0307 0.3655 0.7467
0.0097 0.1193 0.5293 0.7240
0.3962 0.0940 0.5337 0.8470
0.3962 0.2323 0.6662 0.8290
0.8212 0.0467 0.3068 0.6348
0.6043 0.0463 0.3002 0.5603
0.5688 0.1427 0.4523 0.5520
0.5688 0.0855 0.4805 0.5667
0.0202 0.0137 0.0192 0.0198
0.9883 0.9970 0.9980
≤ 5 ≤ 10 ≤ 15 ≤ 20
0.5505 0.7686 0.9018 0.9664
0.6082 0.7365 0.8644 0.9552
0.6786 0.8514 0.9287 0.9768
0.7377 0.8398 0.9067 0.9706
0.5248 0.7034 0.7638 0.7902
0.4662 0.5778 0.5979 0.6017
0.4958 0.5494 0.5642 0.5674
0.5332 0.5667 0.5680 0.5682
0.0200 0.0201 0.0202 0.0202
0.9983 0.9988 0.9991 0.9991
4.2 Landmark Detection
In the next experiment, we evaluated pre-trained
face-detection and facial-landmark-detection models,
which are publicly available as software develop-
ment kits (SDKs) for face detection and recogni-
tion, and compared them using relative eye error
and RMSE using eye-center points or the average
of landmarks around the eye. We evaluated possi-
ble combinations of the methods in each of the four
SDKs: Dlib (D.E.King, 2009), FaceXZoo (J.Wang,
2021), Mediapipe (C.Lugaresi, 2019), and OpenFace
(T.Baltrusaitis, 2018). The specifications of most
SDKs first requires calculating the bounding box by
face detection, then inputing the image and bound-
ing box region to landmark detection. Since many
SDKs did not detect faces in the CASIA datasets and
did not output bounding boxes from detection mod-
ules, we recorded the success rate of detecting at least
one bounding box and carried out landmark detec-
tion when a bounding box was detected. As an ex-
ception, when the evaluation using Dlib failed to de-
Fast Eye Detector Using Siamese Network for NIR Partial Face Images
425
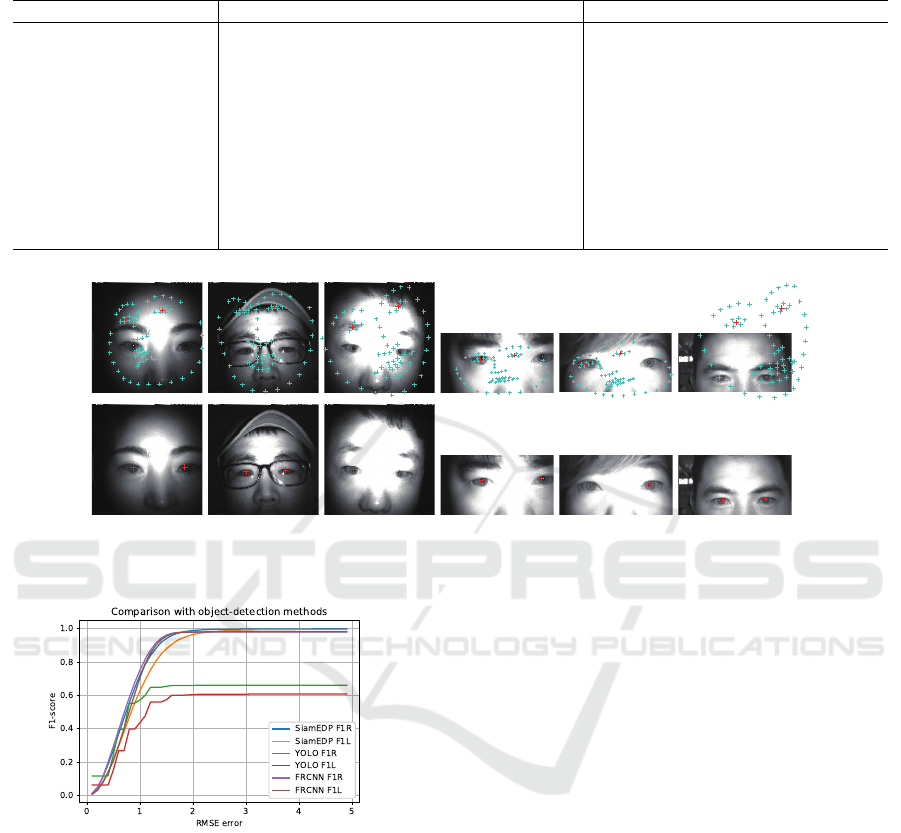
Table 6: Comparison of SiamEDP and facial-landmark-detection methods on CASIA-Iris-M1-S3. The face detection column
is the success rate of the face detection API returned bounding box.
Eye error RMSE
Dlib-5points
Dlib-68points
Dlib-cnn-5points
Dlib-cnn-68points
FaceX-Zoo-mask
FaceX-Zoo-non-mask
Mediapipe-iris
Mediapipe
OpenFace2.0
SiamEDP (proposed)
Face detection ≤ 0.05 ≤ 0.1 ≤ 0.25
0.3008 0.0464 0.2994 0.6569
0.3008 0.1869 0.3697 0.6003
0.7614 0.0547 0.3742 0.7828
0.7614 0.3214 0.6114 0.7914
0.9903 0.1917 0.8139 0.9819
0.9833 0.1906 0.8108 0.9758
0.9728 0.6142 0.9375 0.9714
0.9728 0.2000 0.8708 0.9714
0.8572 0.6489 0.8142 0.8428
0.9894 0.9981 0.9983
≤ 5 ≤ 10 ≤ 15 ≤ 20
0.5400 0.7776 0.8810 0.9500
0.4931 0.6440 0.7928 0.9175
0.6356 0.8636 0.9267 0.9676
0.7163 0.8238 0.8967 0.9489
0.8983 0.9812 0.9878 0.9892
0.8939 0.9751 0.9811 0.9824
0.9560 0.9717 0.9722 0.9722
0.9242 0.9714 0.9722 0.9722
0.8282 0.8438 0.8499 0.8549
0.9988 0.9992 0.9993 0.9994
Figure 3: Results of Dlib (use CNN based detection and 68 points detection) and SiamEDP. The left three columns are
the results using the images from CASIA-Iris-M1-S3 (Tan, 2012b). Right three columns are results using the images from
CASIA-Iris-M1-S2 (Tan, 2012b).
Figure 4: Comparisons with generic object detection meth-
ods. We evaluate F1 scores of each eyes per RMSE.
tect faces, the bounding box was set as the entire im-
age area and input to landmark detection because we
assumed could be optimized from the initial points
on the partial face image. Several facial-landmark-
detection methods output only landmarks around the
eyes, so the average value of the points around the
eyes is output as the eye center. The combinations
of each method and calculate eye-center positions are
listed in Table 4.
The results of CASIA-Iris-M1-S2 are listed in Ta-
ble 5 and those of CASIA-Iris-M1-S3 are listed in Ta-
ble 6. The accuracy of face detection for CASIA-Iris-
M1-S2 is decreased because most of the images are
partial images of the face (from the nose up). Since
landmark detection with Dlib involves optimization
by placing initial points, it can achieve 90% of im-
ages with RMSE less than 15 to some extent even if
applied directly to the image but requires a large mar-
gin when cropped to a single eye. CASIA-Iris-M1-S3
includes the entire face, which has shown higher per-
formance on SDKs than CASIA-Iris-M1-S2, but it is
less accurate than SiamEDP in Eye relative Error and
RMSE. Fig. 3 shows detection examples with Dlib.
We evaluated processing times averaged 10 times
in a CPU environment on CASIA-Iris-M1-S3 scaled
down to 120 × 120 pixels. SiamEDP was 14 msec,
FaceXZoo was 32.5 msec/33 msec depending if de-
tection engine for mask was used, mediapipe facial-
landmark detection was 14 msec and 35 msec with
iris-landmark detection, Dlib with CNN face detec-
tion is 219 msec with 68-point detection, 218 msec
with 5-point detection, Dlib with not-CNN-based de-
tection is 10 msec with 68-point detection and 9 msec
with 10 msec 5-point detection. We were unable to
measure exact execution times when using OpenFace
because we evaluated using a built executable file.
Therefore, SiamEDP fast and the most accurate.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
426

4.3 Object Detection
We compared SiamEDP with the major generic ob-
ject detection methods FRCNN (S.Ren, 2015) and
YOLOv5 (a PyTorch implementation of YOLOv4
(A.Bochkovskiy, 2020)). We re-trained the YOLO
and FRCNN models to detect both eyes from partial
face images. The YOLO models were trained in 70
epochs, while FRCNN was trained in 5 epochs be-
cause the training time with FRCNN is much longer
than the other methods.
The training datasets included CASIA-Iris-
Distance and CASIA-Iris-M1-S1. We trained 50% of
the images from the training domain datasets. The
other 50% of the training domain datasets was used
in the evaluation (trained domain). The un-training
domain datasets included CASIA-Iris-M1-S2 and
CASIA-Iris-M1-S3. All un-training domain datasets
(untrained domain) were used for evaluation. We
labeled a 16 × 32 pixels bounding box centered on
the eye center with two classes, i.e., right eye and left
eye, for YOLO and FRCNN.
We compared the three methods using the F1
score per RMSE to evaluate the discriminative per-
formance between right- and left-eye classes. Since
it assumed with SiamEDP that both eyes are always
included in an input image, a false positive (FP) is al-
ways equal to a false negative (FN). This assumption
makes precision equal to the recall for SiamEDP. In
generic object detection, the number of detection tar-
gets is unlimited, so YOLO and FRCNN may detect
more targets than expected (the FN may differ from
the FP). Thus, we needed to evaluate them on the ba-
sis of the F1 score instead of accuracy.
The results are shown in Figure 4. The results of
YOLO indicate that the F1 scores converged around
0.7, indicating low discriminability between the right
and left eyes. FRCNN had the highest accuracy
in regions where RMSE was small. The results of
SiamEDP are converged to the highest F1 score. The
execution speed of SiamEDP was 11m sec, that of
FRCNN was 1970 msec, and that of YOLO was 87
msec on average of 10 CPU runs for a 123×96 pixels
of image, with SiamEDP having the best results.
5 CONCLUSION
We proposed a fast eye-detection method that is based
on a Siamese network for NIR partial face images. By
using the Siamese network and cosine-margin-based
loss function, a shallow network was able to detect
the left- and right-eye centers with high accuracy. Ex-
perimental results indicate that the Siamese network
and CosFace is effective in achieving high-speed and
high-accuracy detecion in a CPU environment com-
pared with current facial-landmark-detection methods
and generic object-detection methods.
REFERENCES
A.Ablavatski (2020). Real-time pupil tracking from monoc-
ular video for digital puppetry. arXiv:2006.11341.
A.Bochkovskiy (2020). Yolov4: Optimal speed and accu-
racy of object detection. arXiv:2004.10934.
A.Burgos (2013). Robust face landmark estimation under
occlusion. In Proc. of ICCV, pages 1513–1520.
A.Zadeh (2017). Convolutional experts constrained local
model for 3d facial landmark detection. In Proc. of
ICCVW, pages 2519–2528.
B.Yang (2015). Fine-grained evaluation on face detection
in the wild. In Proc. of FG, volume 1, pages 1–7.
C.Lugaresi (2019). Mediapipe: A framework for building
perception pipelines. arXiv:1906.08172.
C.Sagonas (2013). 300 faces in-the-wild challenge: The
first facial landmark localization challenge. In Proc.
of ICCVW, pages 397–403.
D.Couret (2016). Reliability of standard pupillometry prac-
tice in neurocritical care: an observational, double-
blinded study. Critical Care, 20(1):1–9.
D.E.King (2009). Dlib-ml: A machine learning toolkit. The
J. of Machine Learning Research, 10:1755–1758.
D.E.King (2015). Max-margin object detection.
arXiv:1502.00046.
D.S.Bolme (2009). Average of synthetic exact filters. In
Proc. of CVPR, pages 2105–2112. IEEE.
E.Wood (2015). Rendering of eyes for eye-shape registra-
tion and gaze estimation. In Proc. of ICCV, pages
3756–3764.
E.Zhou (2013). Extensive facial landmark localization
with coarse-to-fine convolutional network cascade. In
Proc. of ICCVW, pages 386–391.
F.Wang (2017). Normface: L2 hypersphere embedding for
face verification. In Proc. of ACM Multimedia, pages
1041–1049.
G.M.Araujo (2014). Fast eye localization without a face
model using inner product detectors. In Proc. of
(ICIP), pages 1366–1370. IEEE.
He, K. (2016). Deep residual learning for image recogni-
tion. In Proc. of CVPR, pages 770–778.
H.Li (2015). A convolutional neural network cascade for
face detection. In Proc. of CVPR.
H.Nada (2018). Pushing the limits of unconstrained face
detection: a challenge dataset and baseline results. In
Proc. of BTAS, pages 1–10.
H.Wang (2018). Cosface: Large margin cosine loss for deep
face recognition. In Proc. of CVPR, pages 5265–5274.
H.Wilhelm (2003). Clinical applications of pupillography.
J. of Neuro-ophthalmology, 23(1):42–49.
Fast Eye Detector Using Siamese Network for NIR Partial Face Images
427

J.Daugman (2006). Probing the uniqueness and random-
ness of iriscodes: Results from 200 billion iris pair
comparisons. Proc. of the IEEE, 94(11):1927–1935.
J.Deng (2020). Retinaface: Single-shot multi-level face lo-
calisation in the wild. In Proc. of CVPR, pages 5203–
5212.
J.H.Choi (2019). Accurate eye pupil localization using het-
erogeneous cnn models. In Proc. of ICIP, pages 2179–
2183. IEEE.
J.Matey (2006). Iris on the move: Acquisition of images
for iris recognition in less constrained environments.
Proc. of IEEE, 94(11):1936–1947.
J.Redmon (2018). Yolov3: An incremental improvement.
arXiv:1804.02767.
J.Wang (2021). Facex-zoo: A pytorch toolbox for face
recognition. In Proc. of ACM Multimedia, pages
3779–3782.
J.Xiang (2017). Joint face detection and facial expression
recognition with mtcnn. In Proc. of ICISCE, pages
424–427. IEEE.
K.I.Lee (2020). Deep learning-based pupil center detection
for fast and accurate eye tracking system. In Proc. of
ECCV, pages 36–52. Springer.
K.Matej (2016). A novel performance evaluation method-
ology for single-target trackers. IEEE Trans. on Pat-
tern Analysis and Machine Intelligence, 38(11):2137–
2155.
K.Zhang (2016). Joint face detection and alignment using
multitask cascaded convolutional networks. IEEE Sig-
nal Processing Letters, 23(10):1499–1503.
K.Zhang (2020). All-in-focus iris camera with a great cap-
ture volume. In Proc. of IJCB, pages 1–9. IEEE.
L.Bertinetto (2016). Fully-convolutional siamese networks
for object tracking. In Proc. of ECCV, pages 850–865.
Springer.
L.Liu (2020). Deep learning for generic object detection: A
survey. Int’l J. of Computer Vision, 128(2):261–318.
M.D.Putro (2020). Fast eye detector using cpu based
lightweight convolutional neural network. In Proc. of
ICCAS, pages 12–16. IEEE.
M.K
¨
ostinger (2011). Annotated facial landmarks in the
wild: A large-scale, real-world database for facial
landmark localization. In Proc. of ICCVW, pages
2144–2151.
M.Leo (2013). Unsupervised approach for the accurate lo-
calization of the pupils in near-frontal facial images.
J. of Electronic Imaging, 22(3):033033.
N.Dalal (2005). Histograms of oriented gradients for human
detection. In Proc. of CVPR, volume 1, pages 886–
893. Ieee.
Nguyen, K. (2017). Long range iris recognition: A survey.
Pattern Recognition, 72:123–143.
Nsaif, A. K. (2021). Frcnn-gnb: Cascade faster r-cnn with
gabor filters and na
¨
ıve bayes for enhanced eye detec-
tion. IEEE Access, 9:15708–15719.
N.Wang (2018). Facial feature point detection: A compre-
hensive survey. Neurocomputing, 275:50–65.
N.Y.Ahmed (2021). Real-time accurate eye center localiza-
tion for low-resolution grayscale images. J. of Real-
Time Image Processing, 18(1):193–220.
P.Chandran (2020). Attention-driven cropping for very
high resolution facial landmark detection. In Proc. of
CVPR.
P.Viola (2001). Rapid object detection using a boosted cas-
cade of simple features. In Proc. of CVPR, volume 1,
pages I–I.
Q.Cao (2018). Vggface2: A dataset for recognising faces
across pose and age. In Proc. of FG, pages 67–74.
R.Ranjan (2016). Hyperface: A deep multi-task learning
framework for face detection, landmark localization,
pose estimation, and gender recognition.
S.Ren (2015). Faster r-cnn: Towards real-time object de-
tection with region proposal networks. Advances in
neural information processing systems, 28:91–99.
S.Yang (2016). Wider face: A face detection benchmark. In
Proc. of CVPR, pages 5525–5533.
S.Zhang (2017). S3fd: Single shot scale-invariant face de-
tector. In Proc. of ICCV, pages 192–201.
Tan, T. (2012a). Casia-iris-distance. http:
//biometrics.idealtest.org/dbDetailForUser.do?id=
13##/datasetDetail/4.
Tan, T. (2012b). Casia-iris-m1. http://biometrics.idealtest.
org/dbDetailForUser.do?id=13##/datasetDetail/13.
T.Baltrusaitis (2018). Openface 2.0: Facial behavior analy-
sis toolkit. In Proc. of FG, pages 59–66. IEEE.
V.Bazarevsky (2019). Blazeface: Sub-millisecond neural
face detection on mobile gpus. arXiv:1907.05047.
V.Jain (2010). Fddb: A benchmark for face detection in un-
constrained settings. Technical Report UM-CS-2010-
009, University of Massachusetts, Amherst.
V.Kazemi (2014). One millisecond face alignment with an
ensemble of regression trees. In Proc. of CVPR, pages
1867–1874.
W.Wu (2018). Look at boundary: A boundary-aware face
alignment algorithm. In Proc. of CVPR, pages 2129–
2138.
X.Guo (2019). Pfld: A practical facial landmark detector.
arXiv:1902.10859.
X.Sun (2017). Face detection using deep learning: An im-
proved faster rcnn approach.
Y.Chen (2018). Adversarial occlusion-aware face detection.
In Proc. of BTAS, pages 1–9.
Y.Cheng (2021). Appearance-based gaze estimation
with deep learning: A review and benchmark.
arXiv:2104.12668.
Y.Junjie (2014). Face detection by structural models. Im-
age and Vision Computing , 32(10):790–799. Best of
Automatic Face and Gesture Recognition 2013.
Y.Kartynnik (2019). Real-time facial surface ge-
ometry from monocular video on mobile gpus.
arXiv:1907.06724.
Y.Sun (2013). Deep convolutional network cascade for fa-
cial point detection. In Proc. of CVPR, pages 3476–
3483.
Z.Feng (2018). Wing loss for robust facial landmark locali-
sation with convolutional neural networks. In Proc. of
CVPR.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
428
