
Optimal Activation Function for Anisotropic BRDF Modeling
Stanislav Mike
ˇ
s
a
and Michal Haindl
b
Institute of Information Theory and Automation of the ASCR, Pod Vod
´
arenskou v
ˇ
e
ˇ
z
´
ı 4, Prague, Czechia
Keywords:
Anisotropic BRDF Models, Neural Network, Activation Function, BTF.
Abstract:
We present simple and fast neural anisotropic Bidirectional Reflectance Distribution Function (NN-BRDF)
efficient models, capable of accurately estimating unmeasured combinations of illumination and viewing an-
gles from sparse Bidirectional Texture Function (BTF) measurement of neighboring points in the illumina-
tion/viewing hemisphere. Our models are optimized for the best-performing activation function from nineteen
widely used nonlinear functions and can be directly used in rendering. We demonstrate that the activation
function significantly influences the modeling precision. The models enable us to reach significant time and
cost-saving in not trivial and costly BTF measurements while maintaining acceptably low modeling error. The
presented models learn well, even from only three percent of the original BTF measurements, and we can
prove this by precise evaluation of the modeling error, which is smaller than the errors of alternative analytical
BRDF models.
1 INTRODUCTION
Visual scenes are predominantly represented with
shapes and materials, and thus their recognition re-
quires them to represent these properties realistically.
Unfortunately, the surface material appearance con-
siderably changes under variable observation condi-
tions, which significantly negatively affects its au-
tomatic, reliable recognition in numerous artificial
intelligence applications. As a consequence, most
material recognition attempts apply unnaturally re-
stricted observation conditions (Varma and Zisser-
man, 2009; Bell et al., 2015; Gibert et al., 2015).
A surface material point representation that respects
its appearance changes due to illumination and view-
ing conditions variations are the Bidirectional Re-
flectance Distribution Function (BRDF). A multi-
dimensional visual texture is appropriate for a spa-
tial surface reflectance function model. The best mea-
surable representation is the seven-dimensional Bidi-
rectional Texture Function (BTF) (Haindl and Filip,
2013). BTF can be simultaneously measured, even if
it is not a trivial task, and modeled using state-of-the-
art measurement devices and computers as well as the
most advanced mathematical models of visual data.
Features derived from such multi-dimensional BTF
data models are information-preserving in the sense
a
https://orcid.org/0000-0001-5741-8940
b
https://orcid.org/0000-0001-8159-3685
that they can be used to synthesize data spaces closely
resembling the original measurement data space.
The five-dimensional BRDF model obeys thirteen
simplifying assumptions (Haindl and Filip, 2013)
from the general reflectance model, among them non-
negativity, energy conservation, and the Helmholtz
reciprocity (von Helmholtz, 1867). Hence, the BRDF
model depends only on five variables:
Y
BRDF
= BRDF(λ,θ
i
,ϕ
i
,θ
v
,ϕ
v
) , (1)
where Y is a multispectral pixel, λ the spectral vari-
able, θ
i
,ϕ
i
elevation and azimuthal illumination an-
gles, and θ
v
,ϕ
v
are elevation and azimuthal viewing
angles. Isotropic BRDF models represent materials
whose reflections do not depend on the orientation of
the azimuthal angles but only on their difference.
Several analytical isotropic (Minnaert, 1941;
Phong, 1975; Blinn, 1977; Cook and Torrance, 1982;
Strauss, 1990; Oren and Nayar, 1994; Ngan et al.,
2005) as well as anisotropic (Torrance and Spar-
row, 1966; Ward, 1992; Schlick, 1993; Lafortune
et al., 1997; Ashikhmin and Shirley, 2000; Ragheb
and Hancock, 2008; Dahlan and Hancock, 2016)
BRDF models were proposed. The problem of recon-
structing a measured isotropic BRDF from a limited
number of BRDF-measured samples is addressed in
(Nielsen et al., 2015). Another data-driven acquisi-
tion method of isotropic BRDF from two images was
presented in (Xu et al., 2016). These models use only
isolated pixel-based BRDF measurements and thus
162
Mikeš, S. and Haindl, M.
Optimal Activation Function for Anisotropic BRDF Modeling.
DOI: 10.5220/0011616200003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 1: GRAPP, pages
162-169
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
reduce and less precise information than our proposed
model, which learns from more informative and richer
BTF data.
A neural BRDF model for joint estimation of re-
flectance and natural illumination from a single im-
age of an object of known geometry was suggested
in (Chen et al., 2021). Another neural network-
based representation of BRDF data that enables the
importance sampling of BRDFs was presented in
(Sztrajman et al., 2021), but they use artifact-prone
non-smooth activation function and less informative
BRDF measurements.
Neural BRDF representation (Zheng et al., 2021)
expresses BRDFs as continuous functions and al-
lows importance sampling, but its extrapolation is
poor. Neural BRDF model (Fan et al., 2021), which
considers only isotropic materials, was applied to
spatially-varying bidirectional reflectance distribution
functions.
The isotropic BRDF models cannot represent
materials with an anisotropic appearance faithfully
(Ngan et al., 2005). However, most materials have an
anisotropic appearance. Thus the isotropy is a severe
limitation. Hence there is a need to develop novel,
fully anisotropic BRDF models. The isotropic BRDF
is a particular case of general anisotropic BRDF. Thus
the presented model can faithfully model also any
isotropic BRDF.
We propose a novel anisotropic deep neural net-
based model for BRDF, which reliably learns BRDF
model parameters from sparse BTF measurements.
The NN model has numerous parameters, including
network topology, initialization, optimizer, learning
rate, loss function or angular representation, and oth-
ers. Simultaneous optimization of all these free pa-
rameters is time-demanding. Thus, we have opti-
mized the network topology and, subsequently, the
activation function. We show that the activation func-
tion significantly influences the modeling precision.
Our contribution is a novel anisotropic deep neural
net-based BRDF model, model learning from more
informative BTF measurements, and optimization of
the activation function.
For our analysis in this paper, we take advantage
of unique anisotropic UTIA BTF visual material mea-
surements (Haindl et al., 2012; Haindl et al., 2015)
detailed in the following section, and we can provide
an accurate evaluation of modeling error.
2 BRDF MEASUREMENTS
The UTIA BTF database was measured using a high-
precision robotic gonioreflectometer (Haindl et al.,
Table 1: The number of used samples in training subsets.
v•-i• ia is
va 81 × 81 100% (6561) 81 × 14 17% (1134)
vs 81 × 14 17% (1134) 14 × 14 3% (196)
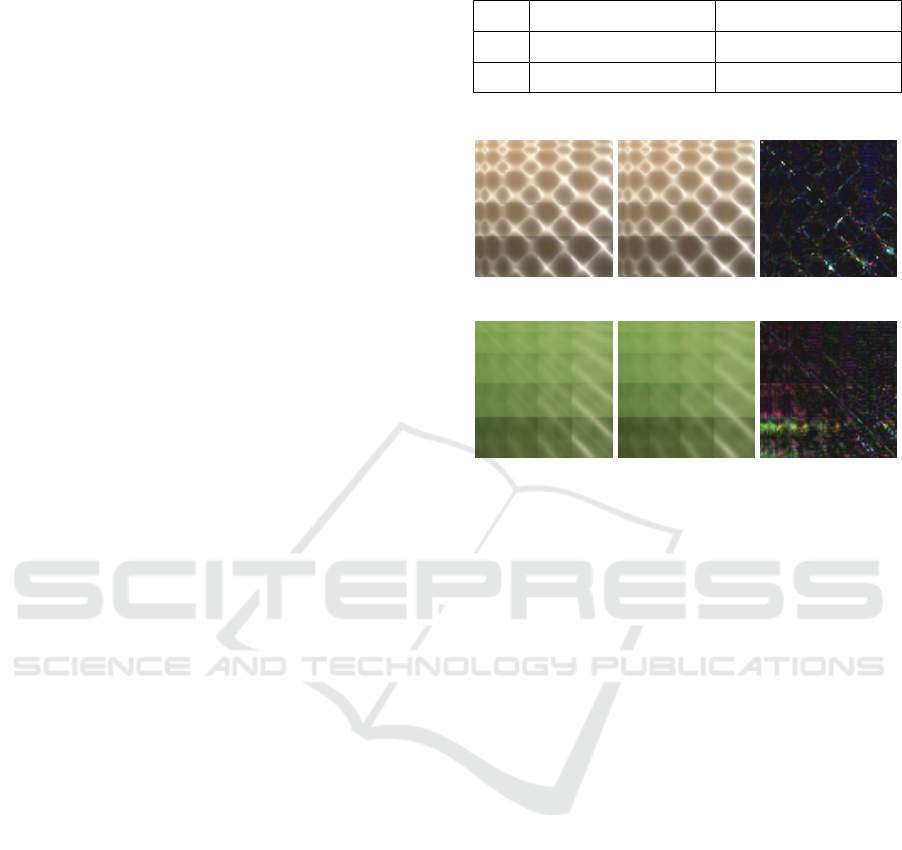
spruce
measured BRDF estimated BRDF BRDF difference
green cloth
Figure 1: Spruce and cloth examples of the UTIA BTF
database modeling results (models 15–30–20 with Soft-
Sign, va-ia). Error difference images are enhanced to be-
come visible.
2012). The setup consists of independently controlled
arms with a camera and light. Its parameters, such as
angular precision of 0.03 degrees, the spatial resolu-
tion of 1000 DPI, or selective spatial measurement,
classify this gonioreflectometer as a state-of-the-art
device. The typical resolution of the area of interest is
around 2000 × 2000 pixels, sample size 7 × 7 [cm],
sensor distance ≈ 2 [m] with the field of view an-
gle 8.25
◦
and each of them is represented using at
least a 16-bit floating-point value for a reasonable
representation of high-dynamic-range visual informa-
tion. The illumination source is eleven LED arrays,
each having flux 280 lm at 0.7 A, spectral wavelength
450 − 700 [nm], and have its optics. The memory
requirements for storage of a single material sample
amount to 360 gigabytes per color channel but can be
much more for a more precise spectral measurement.
2.1 Measured BRDF
We measured each material sample in 81 viewing po-
sitions n
v
and 81 illumination positions n
i
resulting
in 6561 images per sample (4 terabytes of data). We
compute each BRDF value from its corresponding an-
gular BTF measurement. These measured BRDF val-
ues, illustrated for spruce and green cloth in Fig. 1, we
further use as the ground truth for the neural BRDF
Optimal Activation Function for Anisotropic BRDF Modeling
163

angular input
(2 × 3)
hidden
(N
1
)
hidden
(N
2
)
hidden
(N
3
)
RGB output
(3)
Figure 2: Neural network model.
model evaluation.
3 NEURAL NETWORK BRDF
MODELS
We have experimentally verified neural models capa-
ble of accurately approximating unmeasured combi-
nations of the illumination and viewing angles in the
anisotropic BRDF space. Using cross-validation, the
proposed model was selected from a set of simple
deep neural models optimizing the BRDF modeling
error Eq. (3). These simple models offer good mod-
eling precision while simultaneously avoiding huge
training set requirements, thus there is no need to
use any complex state-of-the-art neural models. Our
model (Fig. 2) starts with the view and illumination
angles representation vector. Then several fully con-
nected layers follow. The number of neurons in the
hidden layers is 15–30–20, or 3–6–4 for a simpler
model. The last (output) layer has three neurons cor-
responding to the RGB color. Except for the last
layer, all neurons have one of the twenty selected ac-
tivation functions (Fig. 3), and the last layer is lin-
ear. We implemented the neural network in the Ten-
sorflow framework and designed it in a parallel way
(81 × 81) to speed up training and prediction compu-
tations. The overall number of trainable parameters is
1268, or 88 for the simpler model. We used Glorot
uniform initialization of weights, Adamax optimizer
with a learning rate of 0.0025 and mean absolute er-
ror as the loss function. The models were trained for
500 epochs, and the times (Tab. 3–right) are measured
on Tesla P100 / 16GB.
3.1 Angle Representation
The view and illumintation directions are described
by spherical angles (θ
v
,φ
v
), (θ
i
,φ
i
), where elevation
/ polar angle θ
•
∈ ⟨0, 90) and azimuthal angle φ
•
∈
⟨0,360). We tested six different angle representa-
tions (e.g., Rusinkiewicz parametrization) for the in-
put vector in our neural network model. The angle
vectors are designed to overcome the discontinuity of
azimuthal angle; the proposed formula for xyz repre-
sentation follows:
sin(
θπ
180
)·sin(
φπ
180
),sin(
θπ
180
)·cos(
φπ
180
),cos(
θπ
180
)
.
Our estimation error results suggest the preferability
to use xyz for angle vector representation.
3.2 Activation Functions
We have selected the majority of published activa-
tion functions while excluding only some of their mi-
nor modifications. We have verified our assumption
that non-smooth activation functions (Shamir et al.,
2020) such as the Heaviside function, Piece-wise lin-
ear, Signum, ReLu, rReLu, SELU, HardTanh, Hard-
Shrink, SoftMax, SoftShrink, HardSigmoid are prone
to create visual artifacts in areas around their non-
smooth gradients. While authors (Shamir et al., 2020)
searched for the average individual per-example class
prediction difference over a set of models that are
configured, trained, and supposed to be identical over
some validation dataset, we aim to achieve modeling
accuracy robustness to different training sets while
simultaneously avoiding erroneous visual artifacts.
Among the smooth activation functions (Shamir et al.,
2020), ELU, Exponential, GELU, LiSHT, Mish, Sig-
moid, SoftSign, Swish, Tanh, Snake, SoftPlus, and
TanhShrink are searched for the most robust function
which guarantees the best approximation accuracy for
the wide range of sparse BTF measurements.
3.3 Training Subsets
Fig. 4 shows spherical sampling over angular space.
Two different angular subsets (all,sixth) are used to
create learning sets for the neural network model. The
training sets consist of texture patches with differ-
ent views and illumination directions. Tab. 1 com-
prises the combinations of view and illumination
subsets with the corresponding number of training
patches and their relative size (concerning full mea-
sured space, i.e., 6561 patches).
4 RESULTS
The proposed BRDF model was trained using various
subsets of the fully measured BTF texture space. For
the experiments, we tested six wood veneers and nine
other UTIA BTF material database materials. Two
of them, the spruce veneer and green cloth, are il-
lustrated here. The other thirteen materials confirm
our conclusions. We tested four subset combinations
GRAPP 2023 - 18th International Conference on Computer Graphics Theory and Applications
164
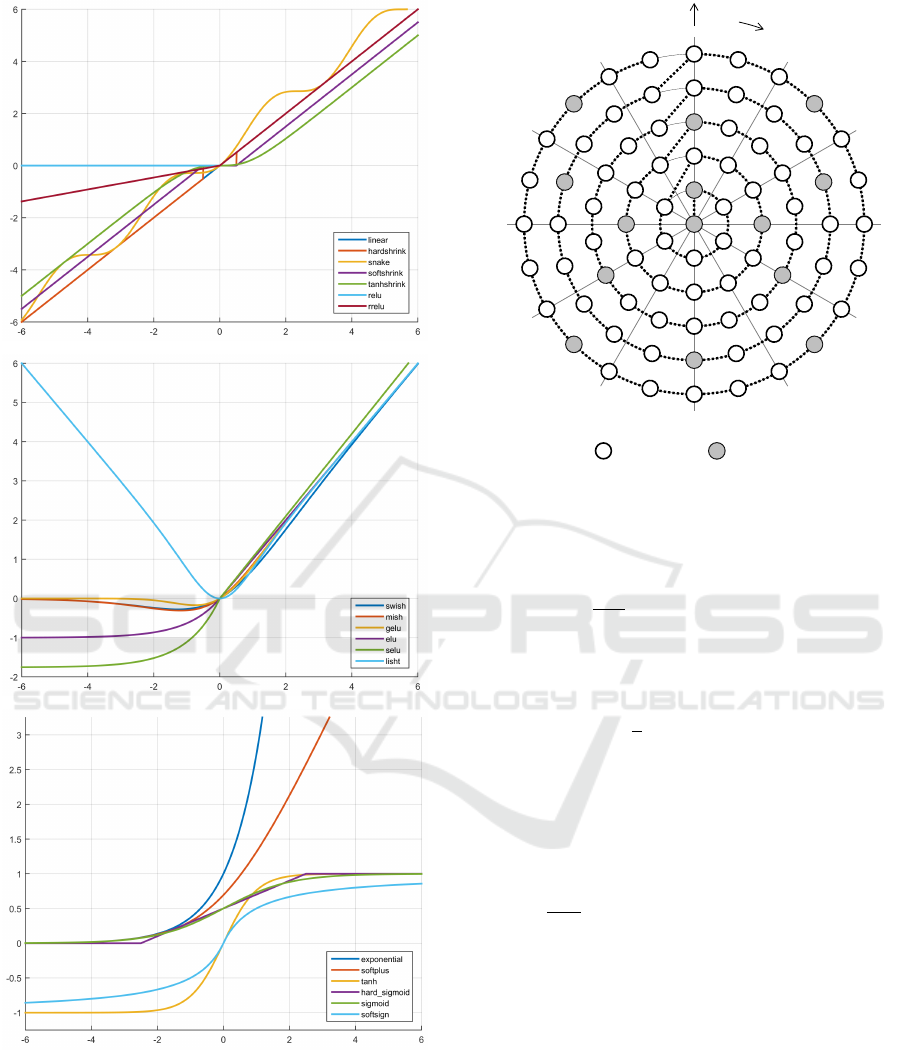
Figure 3: Nineteen of the tested activation functions (top –
Linear, HardShrink, Snake, SoftShrink, TanhShrink, ReLu,
rReLu; middle – Swish, Mish, GELU, ELU, SELU, LiSHT;
bottom – Exponential, SoftPlus, Tanh, HardSigmoid, Sig-
moid, SoftSign).
of viewing (v) and illumination (i) angles further de-
noted as (v/i)(a/s) (see Tab. 1).
The modeling quality is evaluated using the av-
θ
15°
30°
45°
60°
75°
φ
30°
60°
90°
120°
150°
180°
210°
240°
270°
300°
330°
all (81) sixth (14)
Figure 4: Angular subsets used for training – all, sixth.
erage absolute distance between the measured β(i,v)
and estimated
˜
β(i,v) BRDF data:
ε =
1
n
i
n
v
n
i
∑
i=1
n
v
∑
v=1
β(i,v) −
˜
β(i,v)
(2)
where n
i
,n
v
are numbers of illumination and viewing
angles. The spectral mean is the average
¯
ε =
1
3
(ε
R
+ ε
G
+ ε
B
) . (3)
Tabs. 2,3 demonstrate the modeling quality results
¯
ε
Eq. (3) for the color BRDF version. All errors are
computed as a median interpolation error from five
learned models. All spectral measurements are con-
verted to 8 bits per spectral channel. The best acti-
vation function over all tested materials is SoftSign
( f (x) =
x
|x|+1
) followed by Tanh (△
¯
ε = 0.48,△ =
9.4%), GELU (△
¯
ε = 1.1,△ = 21.6%), ELU (△
¯
ε =
1.13,△ = 22%), SELU (△
¯
ε = 1.33,△ = 26%). ..
SoftShrink (△
¯
ε = 25,△ = 492%). The SoftSign av-
erage spectral error for 60 estimated NN-BRDF mod-
els (both models and both materials) is
¯
ε
•
= 5.08,
△
¯
ε,% is the additive error for another activation func-
tion and its corresponding percentual increase. Visual
quality comparison of these NN-BRDF models Fig. 5
confirms the same ordering and the visual defects pro-
duced by the non-smooth activation functions by their
non-smooth functional parts. The non-smooth activa-
tion functions generate significant visible artifacts if
mapped on curved object surfaces, and thus they can-
not be used for realistic NN-BRDF modeling. These
Optimal Activation Function for Anisotropic BRDF Modeling
165
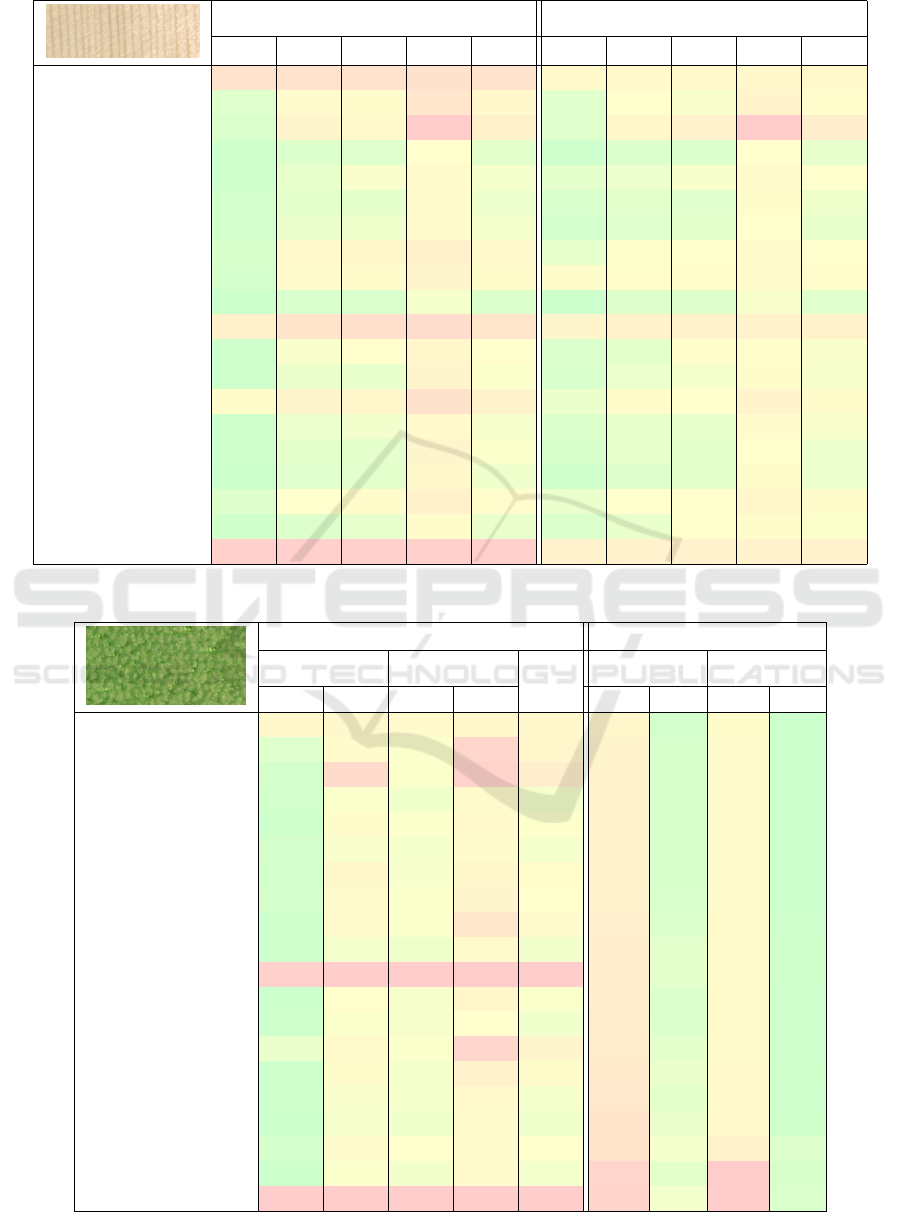
Table 2: BRDF error
¯
ε (median from five) for spruce.
15–30–20 3–6–4
va-ia vs-ia va-is vs-is ⊘ va-ia vs-ia va-is vs-is ⊘
LINEAR 23.92 23.99 24.01 24.25 24.04 23.94 23.98 24.13 24.24 24.07
SIGMOID 3.13 8.01 7.70 21.89 10.18 8.47 13.11 11.49 33.09 16.54
EXPONENTIAL 2.72 12.08 9.45 38.73 15.74 8.09 28.58 36.02 105.8 44.62
TANH 1.74 2.98 3.16 6.18 3.52 5.95 7.66 7.74 14.73 9.02
RELU 1.76 3.89 5.21 8.93 4.95 8.89 9.86 11.42 19.18 12.34
ELU 1.96 3.44 3.59 7.98 4.24 7.31 8.51 8.34 16.78 10.23
SELU 2.11 4.07 4.45 9.05 4.92 6.27 8.45 8.94 13.35 9.25
SOFTPLUS 2.32 9.84 10.78 14.91 9.46 9.13 12.03 13.32 21.66 14.03
TANHSHRINK 2.14 8.25 7.69 12.39 7.62 12.75 14.83 15.23 21.64 16.11
SOFTSIGN 1.59 2.58 2.77 5.01 2.99 5.54 8.01 7.99 11.72 8.31
HARDSHRINK 14.90 22.83 25.42 27.93 22.77 30.87 35.20 33.66 36.70 34.11
LISHT 1.71 5.24 6.10 11.24 6.07 7.59 8.61 15.03 15.31 11.63
SWISH 1.71 4.13 3.94 12.42 5.55 7.37 9.92 10.95 16.96 11.30
HARDSIGMOID 5.85 12.12 11.76 24.15 13.47 9.59 12.61 13.06 33.35 17.15
SNAKE 1.74 4.18 4.73 9.68 5.08 7.86 9.36 9.08 19.84 11.53
MISH 1.70 3.64 3.63 12.56 5.38 7.02 9.24 8.96 14.59 9.95
GELU 1.50 3.20 3.43 10.49 4.65 6.03 7.96 8.60 17.38 9.99
SOFTMAX 3.02 5.73 5.83 14.58 7.29 9.75 13.89 13.85 29.33 16.70
RRELU 1.79 2.98 3.67 7.73 4.04 7.50 9.39 13.16 17.24 11.82
SOFTSHRINK 35.96 35.96 36.05 36.05 36.01 35.96 35.97 36.03 36.05 36.00
Table 3: BRDF error
¯
ε and learning time for green cloth.
error (median from five) time [s] (avg. from five)
15–30–20 3–6–4
⊘
15–30–20 3–6–4
va-ia vs-is va-ia vs-is va-ia vs-is va-ia vs-is
LINEAR 6.44 6.53 6.43 6.91 6.58 784 296 616 258
SIGMOID 2.86 5.84 4.48 15.84 7.25 857 318 646 256
EXPONENTIAL 2.21 14.42 4.45 16.71 9.45 858 317 647 259
TANH 2.14 4.49 3.90 6.07 4.15 859 319 647 258
RELU 1.87 5.38 4.47 6.42 4.53 860 319 649 260
ELU 2.25 4.32 4.12 5.86 4.14 869 320 641 256
SELU 2.19 6.83 4.24 6.95 5.05 872 320 643 258
SOFTPLUS 2.23 5.97 4.43 7.36 5.00 904 328 656 259
TANHSHRINK 1.97 5.90 4.43 11.21 5.88 974 352 670 270
SOFTSIGN 1.88 4.11 3.77 5.97 3.93 993 389 673 276
HARDSHRINK 17.31 18.40 18.15 18.66 18.13 998 386 673 277
LISHT 1.78 4.96 4.16 7.04 4.48 1015 353 680 270
SWISH 1.94 4.45 4.18 5.01 3.89 1045 352 685 265
HARDSIGMOID 3.48 5.94 4.47 16.07 7.49 1063 386 665 274
SNAKE 1.87 4.69 4.04 8.12 4.68 1110 427 695 282
MISH 1.88 4.31 4.10 6.25 4.14 1134 386 700 273
GELU 1.82 4.24 3.84 5.70 3.90 1248 426 716 277
SOFTMAX 2.31 5.81 4.93 6.12 4.79 1263 485 869 363
RRELU 1.84 4.47 3.96 5.85 4.03 1661 385 1892 313
SOFTSHRINK 18.17 18.30 18.17 18.30 18.23 1688 479 1834 345
GRAPP 2023 - 18th International Conference on Computer Graphics Theory and Applications
166
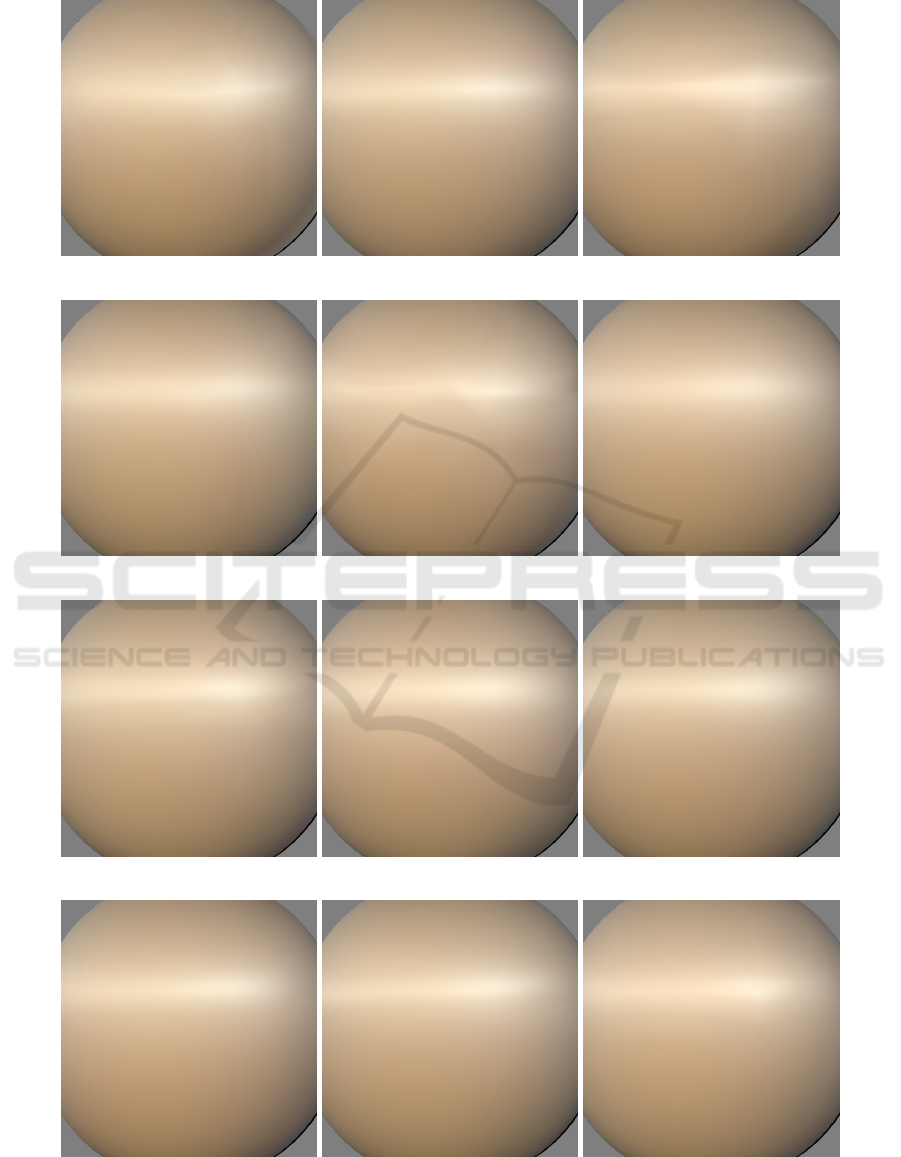
measured + interpolated Tanh (1.70) ReLu (2.02)
ELU (1.79) SELU (1.83) SoftPlus (1.46)
SoftSign (1.97) LiSHT (1.65) Swish (1.84)
Mish (1.66) GELU (1.45) rReLu (2.13)
Figure 5: Spruce rendered modeling results (model 15–30–20 with va-ia) with rendering errors.
Optimal Activation Function for Anisotropic BRDF Modeling
167

artifacts are more visible on lustrous materials (Fig. 5)
than on the matted materials.
Tab. 3 shows the average model learning time of
specific activation functions in seconds. Apart from
the fastest linear activation function, the fastes nonlin-
ear functions are Sigmoid, Exponential, Tanh, ReLu,
ELU, and SELU. SoftSign is only 12% slower than
the fastest Sigmoid function. SoftShrink evaluation
has the most time expensive evaluation (209%).
Tabs. 2,3 show that the best modeling interpola-
tion is achieved if we teach the model from all view-
ing and illumination angles (Fig. 5). The modeling er-
ror results of the smaller NN-BRDF model are more
stable during training data subsampling. Tab. 2 shows
a modeling improvement if we teach the model from
all illumination angles but only sixth viewing angles
(vs-ia) in comparison with all viewing angles and only
sixth illumination angles (va-is) for both models and
the spruce wood. The maximal △
¯
ε error is 2.6
(10%). If the models are learned from only sixth illu-
mination and viewing angles (vs-is) (3% of measure-
ments, the SoftSign activation function is the most ro-
bust with an average error increase △
¯
ε = 3.4, Tanh is
only slightly worse.
Fig. 1 illustrates the estimated NN-BRDF results
and their enhanced pixelwise differences from the
measured spruce and green cloth anisotropic BRDFs.
The median precision over all activation functions for
both compared BRDF’s (Tabs. 2,3) is in the range of
the average spectral modeling error 2.0 − 12.4 and
(4.3%− 19.5%) for larger and smaller model, respec-
tively. The performance of our BRDF model was also
compared with six anisotropic analytical BRDF mod-
els. Their spectral mean BRDF interpolation error for
the spruce material is in the range of 14 for the best
Phong model (Phong, 1975) to 108 for the worst Ed-
wards model (Edwards et al., 2006).
For additional and more detailed results see
https://mosaic.utia.cas.cz/23GRAPP/.
5 CONCLUSION
The presented anisotropic neural NN-BRDF models
allow us to accurately model anisotropic and isotropic
BRDF for various materials with less than 2.8% aver-
age error increase from only 3% of the original mea-
surements. This almost 97% measurement reduction
saves measurement costs and time significantly. The
models learn from more informative BTF data than
usually restricted BRDF measurements.
The best activation function for all tested mate-
rials is SoftSign, followed by Tanh, GELU, ELU,
and SELU from all tested twenty activation functions.
Visual quality comparison of our NN-BRDF models
confirms the same ranking. The non-smooth func-
tional parts of activation functions produce apparent
visual defects. These significant artifacts are visible
if mapped on curved object surfaces; thus, they can-
not be used for realistic NN-BRDF modeling.
The extensive UTIA BTF / BRDF database ver-
ified all modeling results with stable results on var-
ied wood species and several other materials. The
model results are also illustrated on textile and spruce
anisotropic materials. The presented model can re-
construct the fully measured angular BRDF hemi-
sphere from sparse measurements and predict an un-
measured, high-resolution BRDF hemisphere from a
low-resolution measurement net. We have also fa-
vorably compared our numerical as well as visual
results with several analytical previously published
BRDF models and planned to publish these results
elsewhere. The presented models can be used directly
as a fast replacement of a BRDF, comparable to fast
analytic BRDF models, in a rendering engine. They
simultaneously offer a high compression rate and in-
terpolation of unmeasured angles.
ACKNOWLEDGMENTS
The Czech Science Foundation project GA
ˇ
CR 19-
12340S supported this research.
REFERENCES
Ashikhmin, M. and Shirley, P. (2000). An anisotropic phong
brdf model. Journal of graphics tools, 5(2):25–32.
Bell, S., Upchurch, P., Snavely, N., and Bala, K. (2015).
Material recognition in the wild with the materials in
context database. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 3479–3487.
Blinn, J. F. (1977). Models of light reflection for computer
synthesized pictures. In Proceedings of the 4th an-
nual conference on Computer graphics and interac-
tive techniques, pages 192–198. ACM Press.
Chen, Z., Nobuhara, S., and Nishino, K. (2021). Invertible
neural brdf for object inverse rendering. IEEE Trans-
actions on Pattern Analysis and Machine Intelligence,
pages 1–1.
Cook, R. L. and Torrance, K. E. (1982). A reflectance model
for computer graphics. ACM Transactions on Graph-
ics (TOG), 1(1):7–24.
Dahlan, H. A. and Hancock, E. R. (2016). Absorptive
scattering model for rough laminar surfaces. In 2016
23rd International Conference on Pattern Recognition
(ICPR), pages 1905–1910. IEEE.
GRAPP 2023 - 18th International Conference on Computer Graphics Theory and Applications
168

Edwards, D., Boulos, S., Johnson, J., Shirley, P.,
Ashikhmin, M., Stark, M., and Wyman, C. (2006).
The halfway vector disk for brdf modeling. ACM
Transactions on Graphics (TOG), 25(1):1–18.
Fan, J., Wang, B., Ha
ˇ
san, M., Yang, J., and Yan, L.-Q.
(2021). Neural brdfs: Representation and operations.
arXiv preprint arXiv:2111.03797.
Gibert, X., Patel, V. M., and Chellappa, R. (2015). Mate-
rial classification and semantic segmentation of rail-
way track images with deep convolutional neural net-
works. In 2015 IEEE International Conference on Im-
age Processing (ICIP), pages 621–625. IEEE.
Haindl, M. and Filip, J. (2013). Visual Texture. Advances in
Computer Vision and Pattern Recognition. Springer-
Verlag London, London.
Haindl, M., Filip, J., and V
´
avra, R. (2012). Digital material
appearance: the curse of tera-bytes. ERCIM News,
(90):49–50.
Haindl, M., Mike
ˇ
s, S., and Kudo, M. (2015). Unsuper-
vised surface reflectance field multi-segmenter. In Az-
zopardi, G. and Petkov, N., editors, Computer Anal-
ysis of Images and Patterns, volume 9256 of Lecture
Notes in Computer Science, pages 261 – 273. Springer
International Publishing.
Lafortune, E., Foo, S., Torrance, K., and Greenberg, D.
(1997). Non-linear approximation of reflectance func-
tions. In ACM SIGGRAPH 97, pages 117–126. ACM
Press.
Minnaert, M. (1941). The reciprocity principle in lunar pho-
tometry. The Astrophysical Journal, 93:403–410.
Ngan, A., Durand, F., and Matusik, W. (2005). Experimen-
tal analysis of brdf models. In Proceedings of the Six-
teenth Eurographics Conference on Rendering Tech-
niques, EGSR ’05, page 117–126, Goslar, DEU. Eu-
rographics Association.
Nielsen, J. B., Jensen, H. W., and Ramamoorthi, R. (2015).
On optimal, minimal brdf sampling for reflectance ac-
quisition. ACM Trans. Graph., 34(6):186:1–186:11.
Oren, M. and Nayar, S. K. (1994). Generalization of lam-
bert’s reflectance model. In Proceedings of the 21st
annual conference on Computer graphics and inter-
active techniques, pages 239–246.
Phong, B. T. (1975). Illumination for computer generated
pictures. Communications of the ACM, 18(6):311–
317.
Ragheb, H. and Hancock, E. R. (2008). A light scatter-
ing model for layered dielectrics with rough surface
boundaries. International Journal of Computer Vi-
sion, 79(2):179–207.
Schlick, C. (1993). A customizable reflectance model for
everyday rendering. In Fourth Eurographics Work-
shop on Rendering, pages 73–83. Paris, France.
Shamir, G. I., Lin, D., and Coviello, L. (2020). Smooth ac-
tivations and reproducibility in deep networks. arXiv
preprint arXiv:2010.09931.
Strauss, P. S. (1990). A realistic lighting model for com-
puter animators. IEEE Computer Graphics and Ap-
plications, 10(6):56–64.
Sztrajman, A., Rainer, G., Ritschel, T., and Weyrich, T.
(2021). Neural brdf representation and importance
sampling. In Computer Graphics Forum, volume 40,
pages 332–346. Wiley Online Library.
Torrance, K. E. and Sparrow, E. M. (1966). Off-specular
peaks in the directional distribution of reflected ther-
mal radiation. Journal of Heat Transfer, 6(7):223–
230.
Varma, M. and Zisserman, A. (2009). A statistical ap-
proach to material classification using image patch ex-
emplars. IEEE Transactions on Pattern Analysis and
Machine Intelligence, 31(11):2032–2047.
von Helmholtz, H. (1867). Handbuch der physiologischen
Optik, volume 9. Leipzig: Voss.
Ward, G. (1992). Measuring and modeling anisotropic re-
flection. Computer Graphics, 26(2):265–272.
Xu, Z., Nielsen, J. B., Yu, J., Jensen, H. W., and Ramamoor-
thi, R. (2016). Minimal brdf sampling for two-shot
near-field reflectance acquisition. ACM Trans. Graph.,
35(6).
Zheng, C., Zheng, R., Wang, R., Zhao, S., and Bao, H.
(2021). A compact representation of measured brdfs
using neural processes. ACM Trans. Graph., 41(2).
Optimal Activation Function for Anisotropic BRDF Modeling
169
