
Multi-task Fusion for Efficient Panoptic-Part Segmentation
Sravan Kumar Jagadeesh, Ren
´
e Schuster and Didier Stricker
DFKI – German Research Center for Artificial Intelligence, Kaiserslautern, Germany
{firstname.lastname}@dfki.de
Keywords:
Semantic Segmentation, Instance Segmentation, Panoptic Segmentation, Part Segmentation, Part-Aware
Panoptic Segmentation.
Abstract:
In this paper, we introduce a novel network that generates semantic, instance, and part segmentation using
a shared encoder and effectively fuses them to achieve panoptic-part segmentation. Unifying these three
segmentation problems allows for mutually improved and consistent representation learning. To fuse the pre-
dictions of all three heads efficiently, we introduce a parameter-free joint fusion module that dynamically
balances the logits and fuses them to create panoptic-part segmentation. Our method is evaluated on the
Cityscapes Panoptic Parts (CPP) and Pascal Panoptic Parts (PPP) datasets. For CPP, the PartPQ of our pro-
posed model with joint fusion surpasses the previous state-of-the-art by 1.6 and 4.7 percentage points for all
areas and segments with parts, respectively. On PPP, our joint fusion outperforms a model using the previous
top-down merging strategy by 3.3 percentage points in PartPQ and 10.5 percentage points in PartPQ for par-
titionable classes.
1 INTRODUCTION
The human eye can observe a scene at various levels
of abstraction. Humans can not only view the scene
and differentiate semantic categories such as bus, car,
and sky, but they can also understand them. However,
they can also distinguish between the parts of each en-
tity, such as car windows and bus chassis, and group
them according to their instances. There is no deep
learning approach that seeks to achieve several layers
of abstraction with a single network at the moment.
The two pieces that make up a scene are stuff and
things (Cordts et al., 2016). Things are countable
amorphous objects such as persons, cars, or buses,
whereas stuff like the sky or road is usually not count-
able. Many tasks have been created to identify these
aspects in an image. Semantic segmentation and in-
stance segmentation are two of the most common
tasks.
However, these methods are incapable of describ-
ing the entire image. Scene parsing was created to fill
this void, with the goal of describing the entire im-
age by recognizing and semantically segmenting both
stuff and things, a process which is known as panoptic
segmentation (Kirillov et al., 2019b). This approach
has introduced several state-of-the-art panoptic seg-
mentation methods (Cheng et al., 2020; Kirillov et al.,
2019a; Li et al., 2020b; Mohan and Valada, 2021;
Porzi et al., 2019; Xiong et al., 2019). Part segmen-
tation, or part parsing, on the other hand, seeks to se-
mantically analyze the image based on part-level se-
mantics for each class. There has been some effort in
this area, but often part segmentation has been treated
as a semantic segmentation problem (Gong et al.,
2019; Jiang and Chi, 2018, 2019; Li et al., 2017a;
Liu et al., 2018; Luo et al., 2013). There are a few
instance-aware methods (Gong et al., 2018; Li et al.,
2017a; Zhao et al., 2018) and even fewer that handle
multi-class part objects (Zhao et al., 2019; Michieli
et al., 2020).
Part-aware panoptic segmentation (de Geus et al.,
2021; Li et al., 2022) was recently introduced to unify
semantic, instance, and part segmentation. An exam-
ple of part-aware panoptic segmentation is shown in
Figure 1. In (de Geus et al., 2021), a baseline ap-
proach is presented in which two networks are used,
one for panoptic segmentation and the other for part
segmentation. These two networks are trained in-
dependently and the results of both are combined
using a uni-directional (top-down) merging strategy.
This technique of independent training has significant
drawbacks. Due to the use of two different networks,
there is a computational overhead. As the authors
employ different networks, there will be no consis-
tency in their predictions, making the merging pro-
cess inefficient. Also, the independent training strat-
egy leads to learning redundancy since they could po-
tentially share semantic information between segmen-
tation heads.
In this work, we propose a joint network that uses
Jagadeesh, S., Schuster, R. and Stricker, D.
Multi-task Fusion for Efficient Panoptic-Part Segmentation.
DOI: 10.5220/0011616000003411
In Proceedings of the 12th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2023), pages 15-26
ISBN: 978-989-758-626-2; ISSN: 2184-4313
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
15

Image
Ground-truth
Baseline
∗
JPPF (Ours)
Figure 1: We propose a unified network with Joint Panoptic
Part Fusion (JPPF) to generate panoptic-part segmentation.
Here, a prediction of our proposed model on CPP (Meletis
et al., 2020) is shown. Details about the baseline are given
in Section 4.1.
a shared feature extractor to perform semantic, in-
stance, and part segmentation. To achieve panoptic-
part segmentation, we propose Joint Panoptic Part Fu-
sion (JPPF), which fuses all three predictions by giv-
ing equal priority to each prediction head. The follow-
ing is a summary of key contributions of this paper:
• We present a single new network that uses a
shared encoder to perform semantic, instance, and
part segmentation and fuse them efficiently to pro-
duce panoptic-part segmentation.
• To achieve panoptic-part segmentation, we pro-
pose a parameter-free joint panoptic part fusion
module that dynamically considers the logits from
the semantic, instance, and part head and consis-
tently integrates the three predictions.
• We conduct a thorough analysis of our approach
and demonstrate the shared encoder’s efficacy and
the consistency of the novel, joint fusion strategy.
• When compared to state-of-the-art (de Geus et al.,
2021), our suggested fusion yields denser results
at a higher quality.
2 RELATED WORK
Part-aware panoptic segmentation (de Geus et al.,
2021) is a recently introduced problem that brings
semantic, instance, and part segmentation together.
There have been several methods proposed for these
individual tasks, including panoptic segmentation,
which is a blend of semantic and instance segmen-
tation.
2.1 Towards Panoptic-Part
Segmentation
Semantic Segmentation. PSPnet (Zhao et al.,
2017) introduced the pyramid pooling module, which
focuses on the importance of multi-scale features
by learning them at many scales, then concatenat-
ing and up-sampling them. Chen et al. (2017) pro-
posed Atrous Spatial Pyramid Pooling (ASPP), which
is based on spatial pyramid pooling and combines fea-
tures from several parallel atrous convolutions with
varying dilation rates, as well as global average pool-
ing. The incorporation of multi-scale characteristics
and the capturing of global context increases compu-
tational complexity. So, Chen et al. (2018a) intro-
duced the Dense Predtiction Cell (DPC) and Valada
et al. (2018) suggested multi-scale residual units with
changing dilation rates to compute high-resolution
features at various spatial densities, as well as an ef-
ficient atrous spatial pyramid pooling module called
eASPP to learn multi-scale representation with fewer
parameters and a broader receptive field. In the
encoder-decoder architecture, a lot of effort has been
advocated for improving the decoder’s upsampling
layer. Chen et al. (2018b) extend DeepLabV3 (Chen
et al., 2017) by adding an efficient decoder module
to enhance segmentation results at object boundaries.
Later, Tian et al. (2019) suggest replacing it with
data-dependent up-sampling (DUpsampling), which
can recover pixel-wise prediction from low-resolution
CNN outputs and take advantage of the redundant la-
bel space in semantic segmentation.
Instance Segmentation. Here, we mainly concen-
trate on proposal based approaches. Hariharan
et al. (2014) proposed a simultaneous object recog-
nition and segmentation technique that uses Multi-
scale Combinatorial Grouping (MCG) (Pont-Tuset
et al., 2016) to generate proposals and then run them
through a CNN for feature extraction. In addition,
Hariharan et al. (2015) presented a hyper-column
pixel descriptor that captures feature representations
of all layers in a CNN with a strong correlation
for simultaneous object detection and segmentation.
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
16

O Pinheiro et al. (2015) proposed the DeepMask net-
work, which employs a CNN to predict the segmen-
tation mask of each object as well as the likelihood of
the object being in the patch. FCIS (Li et al., 2017b)
employs position sensitive inside/outside score maps
to simultaneously predict object detection and seg-
mentation. Later, one of the most popular networks
for instance segmentation, Mask-RCNN (He et al.,
2017), was introduced. It extends Faster-RCNN (Ren
et al., 2015) with an extra network that segments each
of the detected objects. RoI-align, which preserves
exact spatial position, replaces RoI-pool, which per-
forms coarse spatial quantization for feature encod-
ing.
Part Segmentation. Dense part level segmentation,
on the other hand, is instance agnostic and is regarded
as a semantic segmentation problem (Gong et al.,
2019; Jiang and Chi, 2018, 2019; Li et al., 2017a; Liu
et al., 2018; Luo et al., 2018; Michieli et al., 2020;
Zhao et al., 2019). Most of the research has been con-
ducted to perform human part parsing (Zhao et al.,
2018; Gong et al., 2018; Dong et al., 2013; Ladicky
et al., 2013; Li et al., 2020a; Liang et al., 2018; Lin
et al., 2020; Ruan et al., 2019; Yang et al., 2019a),
and only little work has addressed multi-part segmen-
tation tasks (Zhao et al., 2019; Michieli et al., 2020).
Panoptic Segmentation. The authors of (Kirillov
et al., 2019b) combined the output of two indepen-
dent networks for semantic and instance segmentation
and coined the term panoptic segmentation. Panop-
tic segmentation approaches can be divided into top-
down methods (Li et al., 2018b; Liu et al., 2019; Li
et al., 2018a; Xiong et al., 2019; Sofiiuk et al., 2019;
Porzi et al., 2019) that prioritize semantic segmenta-
tion prediction and bottom-up methods (Yang et al.,
2019b; Cheng et al., 2020; Gao et al., 2019) that pri-
oritize instance prediction. In this work, we build on
EfficientPS (Mohan and Valada, 2021) which will be
extended to perform panoptic-part segmentation.
2.2 Panoptic-Part Segmentation
In recent years, Part-Aware Panoptic Segmentation
(de Geus et al., 2021) was introduced, which aims at
a unified scene and part-parsing. Also, de Geus et al.
(2021) introduced a baseline model using a state-of-
the-art panoptic segmentation network and a part seg-
mentation network, merging them using heuristics.
The panoptic and part segmentation is merged in top-
down or bottom-up manner. In the top-down merge,
the prediction from panoptic segmentation is re-used
for scene-level semantic classes that do not consist
of parts. Then for partitionable semantic classes, the
corresponding segment of the part prediction is ex-
tracted. In case of conflicting predictions, a void la-
bel will be assigned. According to de Geus et al.
(2021), top-down merge produces better results than
the bottom-up approach. In addition, their paper has
released two datasets with panoptic-part annotations:
Cityscapes Panoptic Part (CPP) dataset and Pascal
Panoptic Part (PPP) dataset (Meletis et al., 2020).
Along with the drawbacks of employing independent
networks as mentioned in Section 1, there are con-
cerns with the usage of top-down merge as shown in
Figures 1 and 4. Due to inconsistencies, top-down
merging may result in undefined regions around the
contours of objects. Due to some imbalance between
stuff and things, it also has trouble separating them.
Our work resolves these issues by proposing a uni-
fied fusion for semantics, instances, and parts, giving
equal priority to all individual predictions.
3 UNIFIED PANOPTIC-PART
SEGMENTATION
Our work extends EfficientPS (Mohan and Valada,
2021) in two fundamental aspects: 1.) The network
is extended to incorporate a part segmentation head,
and 2.) we propose our joint panoptic part fusion.
3.1 Network Architecture
We employ the backbone, semantic head, and in-
stance head of EfficientPS (Mohan and Valada, 2021)
in this work. As part segmentation is regarded as
a semantic segmentation problem, we are replicat-
ing the semantic branch of EfficientPS and train it
for part-level segmentation. All three resulting heads
share a common EfficientNet-b5 backbone (Tan and
Le, 2019), which helps to ensure that the predictions
made by the heads are consistent with one another.
The positive impact of the shared encoder is presented
in Section 4.2. In order to produce panoptic-part
segmentation, we combine the predictions from all
three heads in our proposed joint fusion. The goal
of panoptic-part segmentation is to predict (s, p, id)
i
for each pixel i. Here, s represents semantic scene
level class from the semantic head, p represents the
part-level class and id indicates the instance identi-
fier which is obtained from the instance head. An
overview of the architecture of our proposed model
is shown in Figure 2.
Multi-task Fusion for Efficient Panoptic-Part Segmentation
17
ENCODER
(EfficentNet)
NECK
(2-way FPN)
Semantic Head
Part Head
Instance Head
Semantic Logits
Parts Logits
Bbox pred
Class pred
Mask Logits
Joint
Panoptic Part
Fusion
Image
Panoptic Part
Segmentation
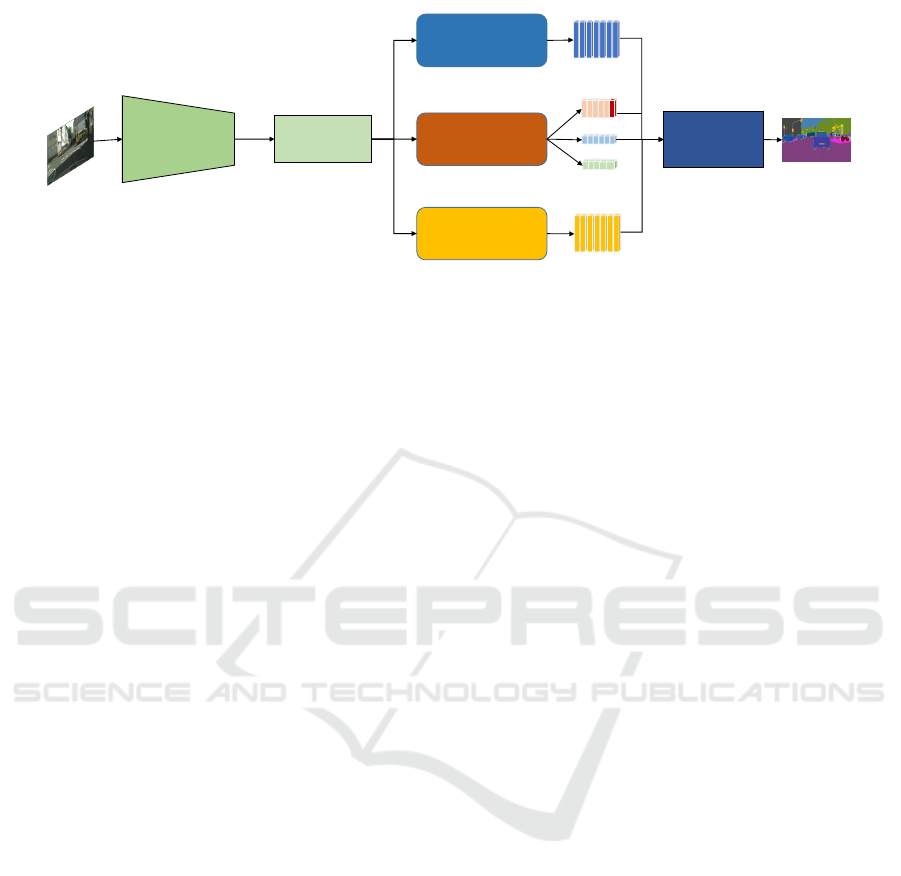
Figure 2: Overview of our proposed network architecture. It features a shared encoder, three specialized prediction heads,
and a unified joint fusion module.
3.1.1 Part Segmentation Head
According to previous work (de Geus et al., 2021),
the grouping of parts yields better results. I.e., se-
mantically identical parts, e.g. the windows of cars or
busses, are grouped into a single part class. We have
verified this finding for our network architecture (see
Table 3) and consequently follow the same princi-
ple. Another relevant design question for the part pre-
diction head is concerned with the non-partitionable
classes. In our approach, we chose to represent all
these classes as a single background class. This
avoids redundant predictions and further balances the
learning of parts versus other classes. Our decision
is again validated by experiments of which the results
are provided in Table 3. Both groupings of classes
(semantic grouping of parts, as well as grouping of the
background) can later be easily distinguished by the
additional information of the other prediction heads
to obtain a fine-grained panoptic-part segmentation.
3.2 Joint Fusion
To obtain panoptic-part segmentation, one must com-
bine the predictions of semantic segmentation, in-
stance segmentation, and part segmentation. In gen-
eral, this includes four possible categories for fusion:
Partitionable and non-partitionable stuff , and parti-
tionable and non-partitionable things. For the sake
of verbosity, we only describe the three combinations
which actually occur in the data (partitionable stuff is
not included), but our approach generalized to the last
case as well. Inspired by the panoptic fusion mod-
ule of EfficientPS (Mohan and Valada, 2021), we pro-
pose a joint panoptic part fusion module that fuses the
individual results of the three heads by giving each
prediction equal priority and thoroughly exploiting
coherent predictions. Figure 3 depicts our proposed
joint panoptic part fusion module.
Fusion for Things. The instance segmentation head
predicts a set of object instances, each with its class
prediction, confidence score, mask logits, and bound-
ing box prediction. The predicted instances are pre-
filtered according to the steps carried out by Effi-
cientPS (Mohan and Valada, 2021), including confi-
dence thresholding, non-maximum suppression, etc.
After this, we obtain a bounding box, class predic-
tion, and masked instance logits MLI for every in-
stance. Simultaneously, we obtain the semantic log-
its of N channels from the semantic head, where N
is the number of semantic classes, which is N
stu f f
+
N
things
. Lastly, we obtain the part logits with N
P
channels from the part head, where N
P
is the number
of grouped parts plus one additional channel for the
background. To balance the individual predictions,
we normalize the semantic and part logits by apply-
ing a softmax function along the channel dimension.
In a next step, the appropriate channels of the seman-
tic prediction is selected, based on the class predic-
tion of each instance. This selected logits are further
masked according to the instance’s bounding box to
yield the masked, semantic logits MLS.
Suppose the predicted class (by the instance head)
is partitionable, then a subset of corresponding log-
its are selected from the part segmentation, e.g. if the
instance head predicts a person, the logits for head,
torso, legs, and arms are selected. These logits are
again masked by the corresponding bounding box to
produce the third masked logits for parts MLP. If the
predicted class is not further segmentable into parts,
the background class from the part logits is selected
instead and masked likewise. To make the fusion op-
eration feasible, we replicate MLS and MLI to match
the number of corresponding parts. For example, a
person instance contains four parts (head, arms, torso,
legs), thus MLP is of shape 4 ×W × H. Therefore,
MLS and MLI are replicated 4 times to match the
shape of MLP.
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
18
MLS
MLP
MLI
MLS
MLI
Part
+
+
FLP
FLNP
FLS
Intermediate
Logits
||
Intermediate
Prediction
Semantic
Prediction
8 x H x W
N
parts+1
x H x W
N
st+th
x H x W
Fill Canvas
with Stuff
Fill Canvas with
Thing Instances
N
st
x H x W
argmax(.)
argmax(.)
+
N
th_np
x H x W
N
th_p
x H x W
N
th_p
x H x W
N
th_p
x H x W
N
th_np
x H x W
N
th_p
x H x W
N
th_np
x H x W
(N
st
+ N
th_p
+ N
th_np
) x H x W
Fused Logits Parts
Fused Logits-No Parts
Panoptic Part Prediction
Yes
No
MLP
N
th_np
x H x W
Fused Logits Stuff
Parts Logits
Semantic Logits
MLI
(i)
Replicate If
instance has Parts
MLS
(i)
MLP
(i)
Mask Logits
Bbox pred
Class pred
N
st
x H x W
1 x H x W
Canvas
instance has no Parts
+
Fuse
Concatenate
BG
||
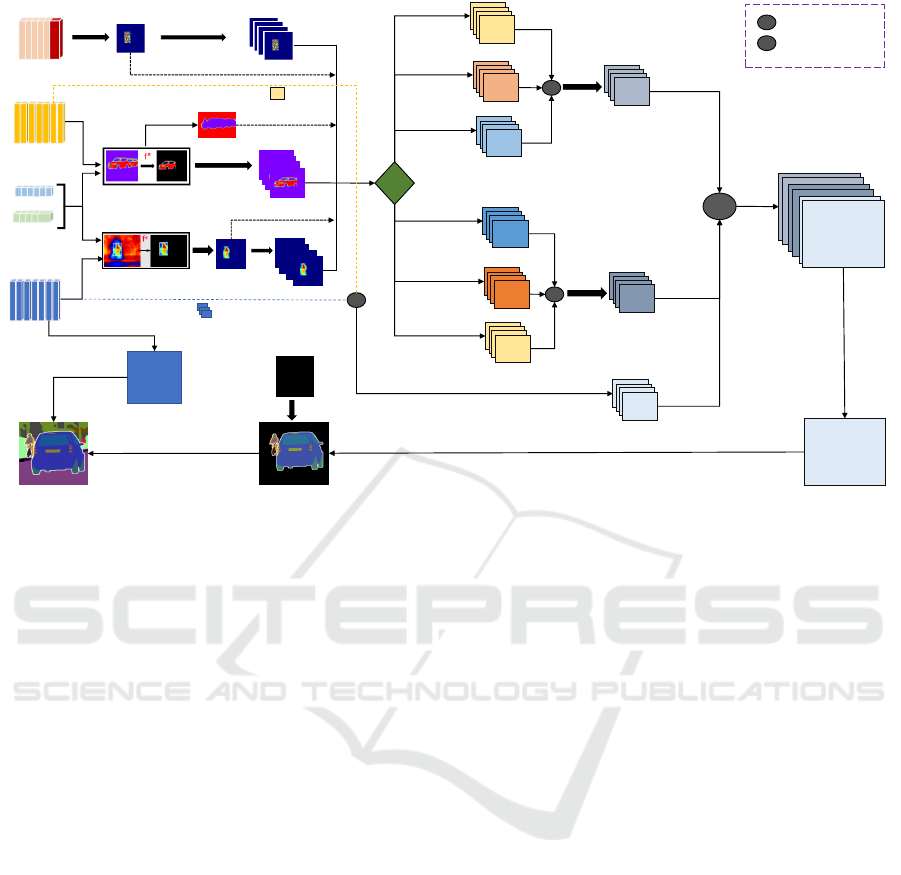
Figure 3: Illustration of our proposed joint fusion module. Semantic, instance, and part predictions are equally balanced and
combined.
By now, three sets of masked logits are available.
We are now fusing these logits separately for classes
with and without parts in the same fashion. To com-
pute the fused logits for classes with parts FLP and
class without parts FLNP, we form the sum of the sig-
moid of the masked logits and the sum of the masked
logits and compute the Hadamard product of both.
This procedure is depicted in Equation 1:
FL (MLL) =
∑
l∈MLL
σ(l)
!
⊙
∑
l∈MLL
l
!
(1)
In this equation, σ(·) denotes the sigmoid function,
⊙ denotes the Hadamard product, and MLL is a set
of masked logits which are supposed to be fused, e.g.
MLL = {MLS, MLI, MLP}. This equation describes
a generalized version of the fusion proposed by Mo-
han and Valada (2021) that handles arbitrarily many
logits.
Fusion for Stuff. To generate the fused logits FLS
for the stuff classes, the N
stu f f
channels from the se-
mantic head are fused with the background channel
of the part head in the same manner, i.e. according to
Equation 1, but this time with only two sets of logits
(no instance information). As mentioned, the same
concept would also apply for stuff that is partition-
able.
Overall Fusion. All three fused logits, FLP,
FLNP, and FLS, are concatenated along the chan-
nel dimensions to obtain intermediate logits, which
produce the intermediate panoptic-part prediction by
taking the argmax of these intermediate logits. Fi-
nally, we fill an empty canvas with the intermediate
panoptic-part prediction for all things. The remaining
empty parts, i.e. the background, of the canvas is filled
with the prediction for stuff classes extracted from the
semantic segmentation head. Lastly, stuff areas below
a minimum threshold min
stu f f
are filtered, as by Mo-
han and Valada (2021). During fusion, the fused score
increases if the predictions of all three heads are con-
sistent, and likewise it is decreased if the predictions
do not match with eachother.
4 EXPERIMENTS AND RESULTS
Datsets. As mentioned before, we use the recently
introduced Cityscapes Panoptic Parts (CPP) and Pas-
cal Panoptic Parts (PPP) datasets (Meletis et al.,
2020). CPP provides pixel-level annotations for 11
stuff classes and 8 things classes, totaling 19 object
classes. Out of the 8 things, five include annotations
at the part level. There are 2975 images for training
and 500 for validation in this finely annotated dataset.
PPP consists of 100 object classes, with 20 things and
80 stuff classes. Part-level annotations are present in
Multi-task Fusion for Efficient Panoptic-Part Segmentation
19

16 of the 20 things. As in previous work (Meletis
et al., 2020), we only consider a subset of 59 ob-
ject classes for training and evaluation, including 20
things and 39 stuff classes, and 58 part classes. These
parts are detailed by Michieli et al. (2020) and Zhao
et al. (2019). PPP consists of a total of 10103 images
which are divided into 4998 images for training and
5105 for validation.
Training Details. For the Cityscapes data, we use
images of the original resolution, i.e. 1024 × 2048
pixels, and resize the input images of PPP to 384 ×
512 pixels for training. We perform data augmenta-
tion, scaling and hyperparameter initialization as in
EfficientPS (Mohan and Valada, 2021). We use a
multi-step learning rate (lr) and train our network by
Stochastic Gradient Descent (SGD) with a momen-
tum of 0.9. For the CPP and PPP, we use a start lr
of 0.07 and 0.01, respectively. We begin the train-
ing with a warm-up phase in which the lr is increased
linearly from
1
3
lr up to lr within 200 iterations. The
weights of all InPlace-ABN layers (Bulo et al., 2018)
are frozen, and we train the model for 10 additional
epochs with a fixed learning rate of 10
−4
. Finally, we
unfreeze the weights of the InPlace-ABN layers and
train the model for 50k iterations beginning with lr of
0.07 (CPP) and 0.01 (PPP), and reduce lr after itera-
tions 32k and 44k by a factor of 10. Four GPUs are
used for the training with a batch size of 2 per GPU
for CPP and 8 per GPU for PPP.
Metrics. In this paper, we evaluate the individual
semantic and part segmentation using mean Intersec-
tion over Union (mIoU), and the instance segmenta-
tion using mean Average Precision (mAP). For the
evaluation of our panoptic-part segmentation, we use
the Part Panoptic Quality (PartPQ) (de Geus et al.,
2021), which is an extension of the Panoptic Quality
(PQ) (Kirillov et al., 2019a).
4.1 Comparison to State-of-the-Art
The baseline approach by de Geus et al. (2021) uses
the panoptic labels of the Cityscapes dataset (Cordts
et al., 2016) to train a panoptic segmentation network.
Since this data is slightly different from the recently
annotated panoptic part dataset (CPP) presented by
de Geus et al. (2021), a direct, fair comparison is
not possible. Table 1 clearly demonstrates that the
CPP dataset differs, as the introduction of parts has
resulted in inconsistencies of annotations. To make
the baseline comparable to our approach in terms of
data, we re-implement the baseline and train it on the
Table 1: Comparison of EfficientPS (Mohan and Valada,
2021) trained on cityscapes panoptic dataset with Effi-
cientPS trained with Cityscapes Panoptic Part (CPP) dataset
(de Geus et al., 2021) and single-scale testing.
∗
indicates
the model trained with CPP dataset.
Method PQ SQ RQ
EfficientPS 63.9 81.5 77.1
EfficientPS
∗
62.2 81.0 75.7
same data. The re-implementation consists of Effi-
cientPS (Mohan and Valada, 2021) for panoptic seg-
mentation, and our part segmentation network with
a separate backbone (cf. Section 3.1.1). Top-down
merging is then used to combine the two independent
results into a panoptic-part segmentation. Our model
is compared to the reproduced baseline and the offi-
cial baseline of de Geus et al. (2021). The official
baseline consists of EfficientPS (Mohan and Valada,
2021) and BSANet (Zhao et al., 2019) with top-down
merging. The results of this comparison are shown in
Table 2 for single-scale and multi-scale inference.
For CPP, the results indicate that our proposed
network improves accuracy significantly compared to
the reproduced baseline for single-scale testing. Our
JPPF outperforms the reproduced baseline by 1.9 per-
centage points (pp) in overall PartPQ and signifi-
cantly by 3.5 pp in PartPQ
P
. Similarly for multi-scale
testing, our proposed model outperforms the baseline
by 1.6 pp and 4.7 pp in PartPQ and PartPQ
P
, respec-
tively. Furthermore, our model betters both baselines
in all individual predictions before merging/fusion. In
addition, JPPF produces denser results than the base-
line, which enhances the density by 0.5 pp for single-
scale testing and by 0.66 pp for multi-scale testing.
For PPP, our model outperforms the top-down
combination DeepLabV3+ (Chen et al., 2018b) and
Mask RCNN (He et al., 2017) (Baseline-1), even
though this baseline was trained with the original Pas-
cal parts and Pascal panoptic segmentation datasets,
which provide more annotations. Baseline-2 (top-
down merging of DLv3-ResNeSt269 (Chen et al.,
2017; Zhang et al., 2022), DetectoRS (Qiao et al.,
2020), and BSANet (Zhao et al., 2019)) obtains an
even better result because it is constructed from much
more complex models, and hence has a higher repre-
sentational capacity. However, when comparing the
model size (see Table 2), it shows that the backbone
of Baseline-2 alone is already more than two times
larger than our whole model.
From Figure 4, we can see that our proposed fu-
sion is able to segment the parts of very small and
distant object classes reliably. Also, our proposed fu-
sion solves the typical problems of top-down merging
(cf. Section 1). As illustrated in Figure 4, there are
no unknown regions within objects (things), since our
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
20
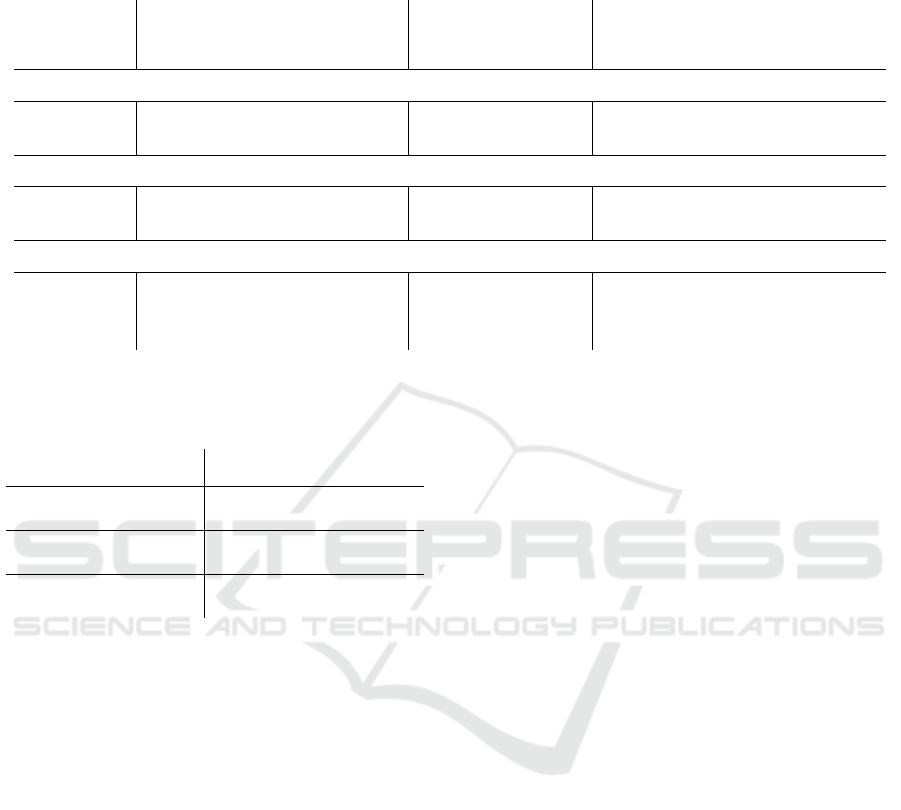
Table 2: Evaluation results of panoptic-part segmentation on Cityscapes and Pascal Panoptic Parts (Meletis et al., 2020)
compared to state-of-the art. P and NP refer to areas with and without part labels, respectively.
∗
indicates our reproduced
baseline (details in Section 4.1). † indicates that the number of parameters refer to the encoders only.
Method
Before Merge/Fusion After Merge/Fusion
Density
[%]
Run
time
[ms]
Model
size
[M]
Sem.
mIoU
Inst.
AP
Part
mIoU
PartPQ
All P NP
Cityscapes Panoptic Parts, Single-Scale
Baseline
∗
79.7 36.6 74.5 57.7 44.2 62.5 98.84 871 68.8
JPPF (Ours) 80.5 37.9 77.0 59.6 47.7 63.8 99.33 397 44.19
Cityscapes Panoptic Parts, Multi-Scale
Baseline 80.3 39.7 76.0 60.2 46.1 65.2 – – –
JPPF (Ours) 81.8 41.3 78.5 61.8 50.8 65.7 99.50 2498 44.19
Pascal Panoptic Parts, Single-Scale
Baseline-1 47.1 38.5 53.9 31.4 47.2 26.0 – – 68
†
Baseline-2 55.1 44.8 58.6 38.3 51.6 33.8 – – 111
†
JPPF (Ours) 46.0 39.1 54.4 32.3 48.3 26.9 92.10 146 44.19
Table 3: Ablation Study on Cityscapes Panoptic Parts. The
design choices of our part segmentation head are validated,
and we contrast independent and shared feature encoders.
Method
Sem.
mIoU
Inst.
AP
Part
mIoU
Grouped Parts – – 74.5
Non-Grouped Parts – – 65.7
Grouped Parts + SemBG – – 75.6
Grouped Parts + BG (Ours) – – 77.0
Independent Networks 78.1 37.3 74.5
Shared Features (Ours) 80.5 37.9 77.0
fusion gives equal priority to all three heads. The sec-
ond issue of stuff classes bifurcating things (as shown
in Figure 1) is also improved largely. This is due to
the introduction of fusion between stuff classes of se-
mantic logits and the background class of part logits.
Lastly when comparing the model sizes and inference
times, we can highlight another advantage of our uni-
fied model: It is more efficient as it requires fewer
parameters. On average, the inference per image re-
quires only 397ms, which is less than half of the time
required by the baseline.
4.2 Ablation Study
4.2.1 Shared Encoder vs. Independent Encoders
Our aim is to jointly learn semantic, instance, and
part segmentation in a single, unified model. To val-
idate that these three tasks benefit from a common
feature representation, we compare our results before
fusion to three separate equivalent networks that have
been trained individually with different encoders. The
model with a single, shared encoder surpasses the in-
dividual models in all three tasks (see Table 3). The
improvement is 2.4 pp, 2.5 pp, and 0.6 pp for se-
mantic, part, and instance segmentation, respectively.
This result clearly indicates that using a shared en-
coder enables the network to learn a common feature
representation, resulting in more accurate individual
outcomes of each head.
4.2.2 Top-Down Merge vs. Joint Fusion
Next, we compare our joint fusion module to
the previously presented top-down merging strategy
(de Geus et al., 2021) in Table 4. The proposed fu-
sion module surpasses the top-down merge in terms
of PartPQ, PartPQ
P
, PartPQ
NP
in all test settings.
Even though our proposed fusion is admittedly only
slightly better, the joint fusion produces also denser
results than the uni-directional merge, indicating the
improved consistency before and after fusion. Addi-
tionally and as explained earlier, our fusion resolves
the typical issues that are present with the top-down
merge, as seen in Figures 1 and 4. This is achieved
by incorporating the part prediction into a mutual fu-
sion, and mainly reflected for the results in areas that
are partitionable. Since the things with part labels are
limited in CPP, the impact is best observed on the PPP
dataset. On this data, our proposed fusion module is
significantly better. Specifically PartPQ
P
is improved
by 10.5 pp, by giving equal priority to the parts during
fusion.
4.3 Run-Time Analysis
We further assessed the efficiency of our proposed
model with joint fusion, and the results are displayed
in Table 5. It is evident that the top-down merging re-
Multi-task Fusion for Efficient Panoptic-Part Segmentation
21
Original Image Ground-truth Baseline
∗
JPPF (Ours)
Figure 4: Qualitative results of our proposed model on Citscapes and Pascal Panoptic Parts compared to our reproduced
baseline, ground-truth and the reference image. More visual examples for both datasets are provided in the appendix in
Figures 5 and 6.
Table 4: Ablation Study on Cityscapes and Pascal Panoptic Parts (Meletis et al., 2020). We compare the uni-directional top-
down merge to our proposed joint fusion module.
Method
Before Merge/Fusion After Merge/Fusion
Density
[%]
Sem.
mIoU
Inst.
AP
Part
mIoU
PartPQ
All P NP
Cityscapes Panoptic Parts, Single-Scale
Ours w/ Top-Down-Merge 80.5 37.9 77.0 59.5 47.5 63.7 99.13
JPPF (Ours) 80.5 37.9 77.0 59.6 47.7 63.8 99.33
Cityscapes Panoptic Parts, Multi-Scale
Ours w/ Top-Down-Merge 81.8 41.3 78.5 61.6 50.7 65.5 99.20
JPPF (Ours) 81.8 41.3 78.5 61.8 50.8 65.7 99.50
Pascal Panoptic Parts, Single-Scale
Ours w/ Top-Down-Merge 46.0 39.1 54.4 29.0 37.8 26.0 89.57
JPPF (Ours) 46.0 39.1 54.4 32.3 48.3 26.9 92.10
Table 5: Run-time comparison of JPPF to the baseline on Cityscapes Panoptic Parts.
∗
indicates the reproduced baseline
which is detailed in Section 4.1.
Method
Individual
Predictions
[ms]
Fuse/Merge [ms] Total
Inference
[ms]
Panoptic
Fusion
Merge
Joint
Fusion
Baseline
∗
269 118 484 – 871
Ours w/ Merge 215 118 484 – 817
JPPF (Ours) 236 – – 161 397
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
22

quires more than twice the time compared to our pro-
posed fusion. To obtain panoptic-part segmentation
as proposed by de Geus et al. (2021), one must first
perform a panoptic fusion and then combine it with
the part segmentation, which adds an extra overhead.
In comparison to the baseline, our approach is even
more efficient because it uses a single backbone.
5 CONCLUSION
In this paper, we proposed a unified network that
helps to generate semantic, instance, and part seg-
mentation and effectively combines them to provide a
consistent panoptic-part segmentation. Our proposed
model with joint fusion significantly outperforms the
state-of-the-art by 1.6 pp in overall PartPQ and by
4.7 pp in PartPQ
P
on the CPP dataset. For the PPP
dataset, our model with joint fusion outperforms our
model with the top-down merge significantly by 3.3
pp in overall PartPQ and by 10.5 pp in PartPQ
P
.
With the addition of stuff and parts into the fusion,
our suggested fusion modules addresses the problems
encountered in the top-down merge, such as unknown
pixels inside contours and the bifurcation of things
and stuff. When compared to top-down merge, our
suggested joint fusion is faster and produces denser
results with superior segmentation quality.
For future work, we plan to interpolate the remain-
ing, filtered regions in the prediction to obtain a fully
dense panoptic-part segmentation.
ACKNOWLEDGEMENTS
This work was partially funded by the Federal Min-
istry of Education and Research Germany under the
project DECODE (01IW21001).
REFERENCES
Bulo, S. R., Porzi, L., and Kontschieder, P. (2018). In-place
activated batchnorm for memory-optimized training
of dnns. In Conference on Computer Vision and Pat-
tern Recognition (CVPR). 6
Chen, L., Collins, M. D., Zhu, Y., Papandreou, G., Zoph, B.,
Schroff, F., Adam, H., and Shlens, J. (2018a). Search-
ing for efficient multi-scale architectures for dense im-
age prediction. Advances in Neural Information Pro-
cessing Systems (NeurIPS). 2
Chen, L., Papandreou, G., Schroff, F., and Adam, H. (2017).
Rethinking atrous convolution for semantic image
segmentation. arXiv preprint arXiv:1706.05587. 2,
6
Chen, L.-C., Zhu, Y., Papandreou, G., Schroff, F., and
Adam, H. (2018b). Encoder-decoder with atrous sep-
arable convolution for semantic image segmentation.
In European conference on computer vision (ECCV).
2, 6
Cheng, B., Collins, M. D., Zhu, Y., Liu, T., Huang, T. S.,
Adam, H., and Chen, L.-C. (2020). Panoptic-deeplab:
A simple, strong, and fast baseline for bottom-up
panoptic segmentation. In Conference on Computer
Vision and Pattern Recognition (CVPR). 1, 3
Cordts, M., Omran, M., Ramos, S., Rehfeld, T., Enzweiler,
M., Benenson, R., Franke, U., Roth, S., and Schiele,
B. (2016). The cityscapes dataset for semantic urban
scene understanding. In Conference on Computer Vi-
sion and Pattern Recognition (CVPR). 1, 6
de Geus, D., Meletis, P., Lu, C., Wen, X., and Dubbelman,
G. (2021). Part-aware panoptic segmentation. In Con-
ference on Computer Vision and Pattern Recognition
(CVPR). 1, 2, 3, 4, 6, 7, 9
Dong, J., Chen, Q., Xia, W., Huang, Z., and Yan, S.
(2013). A deformable mixture parsing model with
parselets. In International Conference on Computer
Vision (ICCV). 3
Gao, N., Shan, Y., Wang, Y., Zhao, X., Yu, Y., Yang, M.,
and Huang, K. (2019). Ssap: Single-shot instance
segmentation with affinity pyramid. In International
Conference on Computer Vision (ICCV). 3
Gong, K., Gao, Y., Liang, X., Shen, X., Wang, M., and Lin,
L. (2019). Graphonomy: Universal human parsing via
graph transfer learning. In Conference on Computer
Vision and Pattern Recognition (CVPR). 1, 3
Gong, K., Liang, X., Li, Y., Chen, Y., Yang, M., and Lin, L.
(2018). Instance-level human parsing via part group-
ing network. In European Conference on Computer
Vision (ECCV). 1, 3
Hariharan, B., Arbel
´
aez, P., Girshick, R., and Malik, J.
(2014). Simultaneous detection and segmentation. In
European Conference on Computer Vision (ECCV). 2
Hariharan, B., Arbel
´
aez, P., Girshick, R., and Malik, J.
(2015). Hypercolumns for object segmentation and
fine-grained localization. In Conference on Computer
Vision and Pattern Recognition (CVPR). 2
He, K., Gkioxari, G., Doll
´
ar, P., and Girshick, R. (2017).
Mask r-cnn. In International Conference on Computer
Vision (ICCV). 3, 6
Jiang, Y. and Chi, Z. (2018). A cnn model for semantic
person part segmentation with capacity optimization.
Transactions on Image Processing (T-IP). 1, 3
Jiang, Y. and Chi, Z. (2019). A cnn model for human pars-
ing based on capacity optimization. Applied Sciences.
1, 3
Kirillov, A., Girshick, R., He, K., and Doll
´
ar, P. (2019a).
Panoptic feature pyramid networks. In Conference on
Computer Vision and Pattern Recognition (CVPR). 1,
6
Kirillov, A., He, K., Girshick, R., Rother, C., and Doll
´
ar,
P. (2019b). Panoptic segmentation. In Conference on
Computer Vision and Pattern Recognition (CVPR). 1,
3
Multi-task Fusion for Efficient Panoptic-Part Segmentation
23

Ladicky, L., Torr, P. H., and Zisserman, A. (2013). Human
pose estimation using a joint pixel-wise and part-wise
formulation. In Conference on Computer Vision and
Pattern Recognition (CVPR). 3
Li, J., Raventos, A., Bhargava, A., Tagawa, T., and Gaidon,
A. (2018a). Learning to fuse things and stuff. arXiv
preprint arXiv:1812.01192. 3
Li, P., Xu, Y., Wei, Y., and Yang, Y. (2020a). Self-correction
for human parsing. Transactions on Pattern Analysis
and Machine Intelligence (T-PAMI). 3
Li, Q., Arnab, A., and Torr, P. H. (2017a). Holistic,
instance-level human parsing. British Machine Vision
Conference (BMVC). 1, 3
Li, Q., Arnab, A., and Torr, P. H. (2018b). Weakly-and
semi-supervised panoptic segmentation. In European
conference on computer vision (ECCV). 3
Li, Q., Qi, X., and Torr, P. H. (2020b). Unifying training and
inference for panoptic segmentation. In Conference on
Computer Vision and Pattern Recognition (CVPR). 1
Li, X., Xu, S., Yang, Y., Cheng, G., Tong, Y., and Tao,
D. (2022). Panoptic-PartFormer: Learning a Unified
Model for Panoptic Part Segmentation. In European
Conference on Computer Vision (ECCV). 1
Li, Y., Qi, H., Dai, J., Ji, X., and Wei, Y. (2017b). Fully con-
volutional instance-aware semantic segmentation. In
Conference on Computer Vision and Pattern Recogni-
tion (CVPR). 3
Liang, X., Gong, K., Shen, X., and Lin, L. (2018). Look
into person: Joint body parsing & pose estimation net-
work and a new benchmark. Transactions on Pattern
Analysis and Machine Intelligence (T-PAMI). 3
Lin, K., Wang, L., Luo, K., Chen, Y., Liu, Z., and Sun,
M.-T. (2020). Cross-domain complementary learning
using pose for multi-person part segmentation. Trans-
actions on Circuits and Systems for Video Technology
(T-CSVT). 3
Liu, H., Peng, C., Yu, C., Wang, J., Liu, X., Yu, G., and
Jiang, W. (2019). An end-to-end network for panoptic
segmentation. In Conference on Computer Vision and
Pattern Recognition (CVPR). 3
Liu, S., Sun, Y., Zhu, D., Ren, G., Chen, Y., Feng, J., and
Han, J. (2018). Cross-domain human parsing via ad-
versarial feature and label adaptation. In Conference
On Artificial Intelligence (AAAI). 1, 3
Luo, P., Wang, X., and Tang, X. (2013). Pedestrian parsing
via deep decompositional network. In International
Conference on Computer Vision (ICCV). 1
Luo, X., Su, Z., Guo, J., Zhang, G., and He, X. (2018).
Trusted guidance pyramid network for human pars-
ing. In ACM International Conference on Multimedia
(ACM-MM). 3
Meletis, P., Wen, X., Lu, C., de Geus, D., and Dubbelman,
G. (2020). Cityscapes-panoptic-parts and pascal-
panoptic-parts datasets for scene understanding. arXiv
preprint arXiv:2004.07944. 2, 3, 5, 6, 7, 8, 11, 12
Michieli, U., Borsato, E., Rossi, L., and Zanuttigh, P.
(2020). Gmnet: Graph matching network for large
scale part semantic segmentation in the wild. In Eu-
ropean Conference on Computer Vision (ECCV). 1, 3,
6
Mohan, R. and Valada, A. (2021). EfficientPS: Effi-
cient Panoptic Segmentation. International Journal
of Computer Vision (IJCV). 1, 3, 4, 5, 6
O Pinheiro, P. O., Collobert, R., and Doll
´
ar, P. (2015).
Learning to segment object candidates. Advances in
Neural Information Processing Systems (NeurIPS). 3
Pont-Tuset, J., Arbelaez, P., Barron, J. T., Marques, F., and
Malik, J. (2016). Multiscale combinatorial grouping
for image segmentation and object proposal genera-
tion. Transactions on Pattern Analysis and Machine
Intelligence (T-PAMI). 2
Porzi, L., Bulo, S. R., Colovic, A., and Kontschieder, P.
(2019). Seamless scene segmentation. In Conference
on Computer Vision and Pattern Recognition (CVPR).
1, 3
Qiao, S., Chen, L.-C., and Yuille, A. (2020). Detec-
tors: Detecting objects with recursive feature pyra-
mid and switchable atrous convolution. arXiv preprint
arXiv:2006.02334. 6
Ren, S., He, K., Girshick, R. B., and Sun, J. (2015). Faster
R-CNN: towards real-time object detection with re-
gion proposal networks. Advances in Neural Informa-
tion Processing Systems (NeurIPS). 3
Ruan, T., Liu, T., Huang, Z., Wei, Y., Wei, S., and Zhao, Y.
(2019). Devil in the details: Towards accurate single
and multiple human parsing. In Conference on Artifi-
cial Intelligence (AAAI). 3
Sofiiuk, K., Barinova, O., and Konushin, A. (2019). Adap-
tis: Adaptive instance selection network. In Interna-
tional Conference on Computer Vision (ICCV). 3
Tan, M. and Le, Q. (2019). Efficientnet: Rethinking model
scaling for convolutional neural networks. In Interna-
tional Conference on Machine Learning (ICML). 3
Tian, Z., He, T., Shen, C., and Yan, Y. (2019). Decoders
matter for semantic segmentation: Data-dependent
decoding enables flexible feature aggregation. In Con-
ference on Computer Vision and Pattern Recognition
(CVPR). 2
Valada, A., Mohan, R., and Burgard, W. (2018). Self-
supervised model adaptation for multimodal seman-
tic segmentation. International Journal of Computer
Vision (IJCV). 2
Xiong, Y., Liao, R., Zhao, H., Hu, R., Bai, M., Yumer, E.,
and Urtasun, R. (2019). Upsnet: A unified panoptic
segmentation network. In Conference on Computer
Vision and Pattern Recognition (CVPR). 1, 3
Yang, L., Song, Q., Wang, Z., and Jiang, M. (2019a). Pars-
ing r-cnn for instance-level human analysis. In Con-
ference on Computer Vision and Pattern Recognition
(CVPR). 3
Yang, T., Collins, M. D., Zhu, Y., Hwang, J., Liu, T., Zhang,
X., Sze, V., Papandreou, G., and Chen, L. (2019b).
Deeperlab: Single-shot image parser. arXiv preprint
arXiv:1902.05093. 3
Zhang, H., Wu, C., Zhang, Z., Zhu, Y., Lin, H., Zhang,
Z., Sun, Y., He, T., Mueller, J., Manmatha, R., et al.
(2022). Resnest: Split-attention networks. In Con-
ference on Computer Vision and Pattern Recognition
(CVPR). 6
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
24
Zhao, H., Shi, J., Qi, X., Wang, X., and Jia, J. (2017). Pyra-
mid scene parsing network. In Conference on Com-
puter Vision and Pattern Recognition (CVPR). 2
Zhao, J., Li, J., Cheng, Y., Sim, T., Yan, S., and Feng, J.
(2018). Understanding humans in crowded scenes:
Deep nested adversarial learning and a new bench-
mark for multi-human parsing. In ACM International
Conference on Multimedia (ACM-MM). 1, 3
Zhao, Y., Li, J., Zhang, Y., and Tian, Y. (2019). Multi-class
part parsing with joint boundary-semantic aware-
ness. In International Conference on Computer Vision
(ICCV). 1, 3, 6
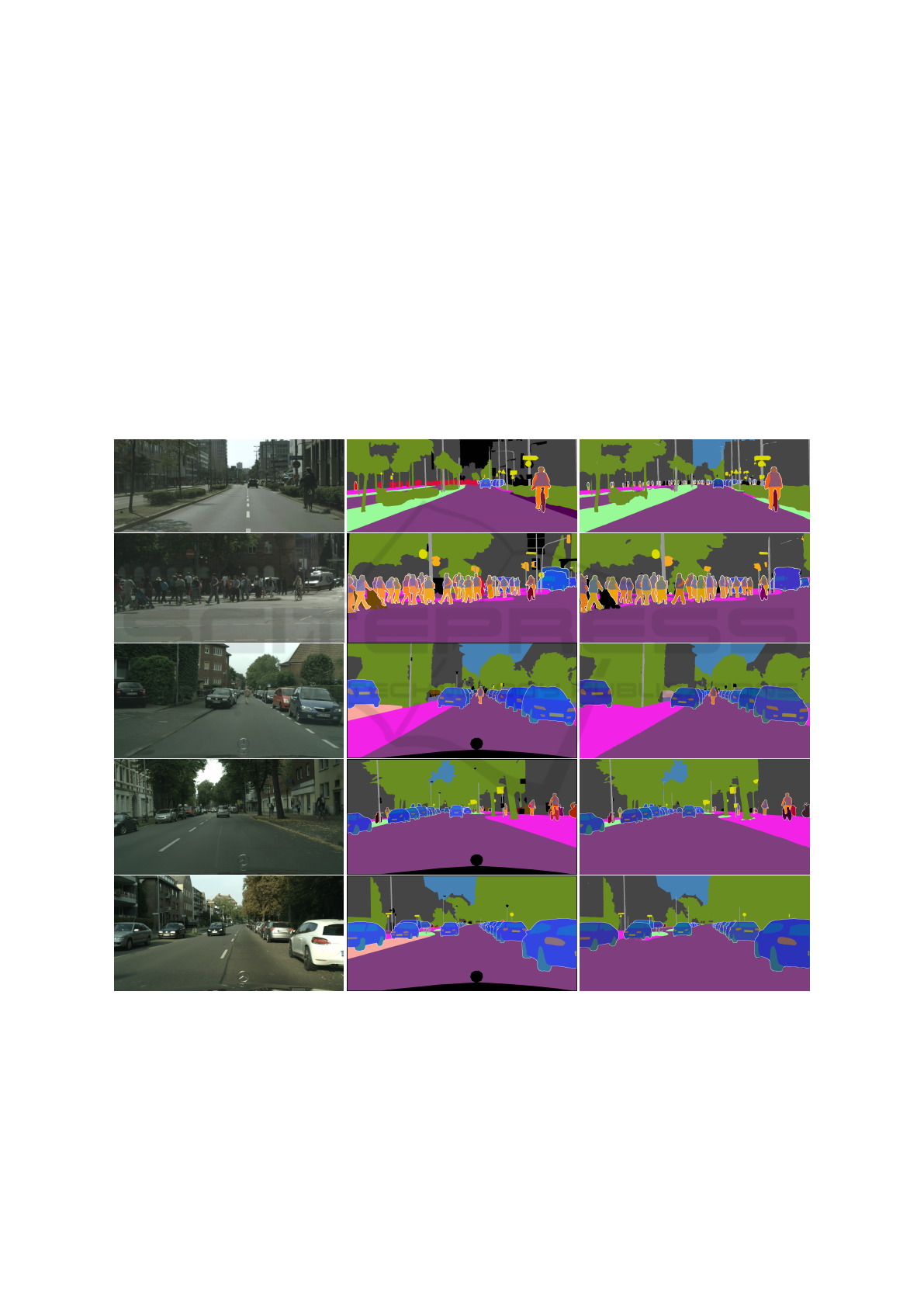
APPENDIX
Original Image Ground-truth JPPF (Ours)
Figure 5: Qualitative results of our proposed model compared to the ground truth and the reference image on CPP (Meletis
et al., 2020).
Multi-task Fusion for Efficient Panoptic-Part Segmentation
25

Original Image Ground-truth JPPF (Ours)
Figure 6: Qualitative results of our proposed model compared to the ground truth and the reference image on PPP (Meletis
et al., 2020).
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
26
