
Chop-SAT: A New Approach to Solving SAT and Probabilistic SAT for
Agent Knowledge Bases
Thomas C. Henderson
1 a
, David Sacharny
2
, Amar Mitiche
3
, Xiuyi Fan
4
, Amelia Lessen
1
,
Ishaan Rajan
1
and Tessa Nishida
1
1
School of Computing, University of Utah, Salt Lake City, Utah, U.S.A.
2
Blyncsy Inc, Salt Lake City, UT, U.S.A.
3
Department of Telecommunications, Institut National de la Recherche Scientifique, Montreal, Quebec, Canada
4
Nanyang Technological University, Singapore
Keywords:
Autonomous Agent Reasoning, Cutting Planes, SAT, PSAT.
Abstract:
An early approach to solve the SAT problem was to convert the disjunctions directly to equations which create
an integer programming problem with 0-1 solutions. We have independently developed a similar method
which we call Chop-SAT based on geometric considerations. Our position is that Chop-SAT provides a wide
range of geometric approaches to find SAT and probabilistic SAT (PSAT) solutions. E.g., one potentially
powerful approach to determine that a SAT solution exists is to fit the maximal volume ellipsoid and explore
it semi-major axis direction to find an H
n
vertex in that direction.
1 INTRODUCTION
Given a logical sentence (or formula) from proposi-
tional calculus, the Satisfiability Problem (SAT) is to
determine if there is a truth assignment to the logi-
cal variables that makes the sentence true. If so, the
sentence is called satisfiable; if not, then it is unsatis-
fiable. SAT is the original NP-complete problem and
requires polynomial time on a nondeterministic Tur-
ing machine (Sipser, 2012). Recently, Henderson et
al. proposed a geometric approach, called Chop-SAT,
for solving SAT (see (Henderson et al., 2021)). The
method produces a convex polytope feasible region,
and the goal here is to explore properties of the feasi-
ble region which allow the solution of SAT or PSAT.
Given n logical variables (or atoms), a model (or
complete conjunction) is an assignment of 0 (false)
or 1 (true) to each atom. There are 2
n
models.
These models can be represented as n-tuples in n-
dimensional space, and correspond to the corners of
H
n
, the n-D hypercube. The semantics of the hy-
percube is that the i
th
axis corresponds to the values
which can be assigned to the i
th
variable, and the val-
ues can be relaxed to lie in the interval [0,1].
Given any point in H
n
, that point can be consid-
ered as a set of probabilities for the atoms. This al-
a
https://orcid.org/0000-0002-0792-3882
lows consideration of a probabilistic version of SAT
called Probabilistic SAT (PSAT) (see (Georgakopou-
los et al., 1987; Nilsson, 1986) for a detailed intro-
duction and analysis of the complexity of the prob-
lem). PSAT is defined as follows; given a logical
sentence in Conjunctive Normal Form (CNF), and
a probability, p
i
, associated with each conjunct, C
i
,
find a function, π : Ω → [0,1], where Ω is the set of
all complete conjunctions, and 0 ≤ π(ω
k
) ≤ 1, and
p
i
=
∑
ω
k
|=C
i
π(ω
k
),ω
k
∈ Ω.
Chop-SAT is based on the following observation:
when an agent’s knowledge base is represented as a
CNF sentence, then every conjunct is a disjunction.
A disjunction with k
i
literals is made false by assign-
ing a falsifying truth value to each of the disjunction’s
literals. This assignment, along with all possible 0-1
assignments to the k = n −k
i
literals not in the dis-
junction, defines the models which do not satisfy the
conjunct. Geometrically, this set of models is a sub-
hypercube, H
k
, of the n-dimensional hypercube, H
n
.
For each conjunct there exists an (n-1)-
dimensional hyperplane, h, that separates H
k
from the corners of H
n
which satisfy the conjunct.
This leads to the notion of a chop: the hyperplane,
h, is represented so that H
k
is on h’s negative side
(viewing the hyperplane equation as a signed dis-
tance function) while solution corners are on h’s
48
Henderson, T., Sacharny, D., Mitiche, A., Fan, X., Lessen, A., Rajan, I. and Nishida, T.
Chop-SAT: A New Approach to Solving SAT and Probabilistic SAT for Agent Knowledge Bases.
DOI: 10.5220/0011614400003393
In Proceedings of the 15th International Conference on Agents and Artificial Intelligence (ICAART 2023) - Volume 3, pages 48-54
ISBN: 978-989-758-623-1; ISSN: 2184-433X
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

non-negative side. By intersecting the non-negative
half-space of h with n-dimensional space, a convex
feasible region is created which contains the solutions
for the conjunct (this holds because the intersection of
convex sets is a convex set). Applying this operation
for each conjunct in th CNF sentence results in a
convex feasible region which must contain solutions
to the CNF sentence, if any.
Our position is that Chop-SAT offers the possibil-
ity to find efficient and effective ways to solve SAT.
Chop-SAT produces a feasible region as follows:
• First, a knowledge base (KB) is defined as a CNF
sentence, and each conjunct is given a probability
(for a SAT problem, this will be 1 for each con-
junct).
• Next, the Chop-SAT method is used to produce
a set of hyperplanes such that the intersection of
their non-negative half-spaces determines the fea-
sible region.
• The resulting feasible region is convex.
The feasible region represents the solution space for
the KB. If any of the original hypercube corners exist
in the feasible region, the KB is satisfiable, otherwise
it is unsatisfiable.
2 BACKGROUND
Gomory (Gomory, 1958) introduced the cutting plane
method as an extension to Dantzig’s linear pro-
gramming approach to solving discrete variable ex-
tremum problems (Dantzig, 1957). Gomory provided
a method so that when the objective function was
maximized (e.g., using the simplex method), if the
result was a non-integral solution, then a new con-
straint plane was found algorithmically to separate
(cut) the non-integer solution from the integer solu-
tions. Chvatal (Chvatal, 1973; Chvatal, 1985) de-
veloped this method further, proved supporting the-
orems for bounded polytopes, and applied the results
to solve combinatorial problems. Note that integer
programming is in NP (Papadimitriou, 1981).
In terms of solving SAT, Cook et al. (Cook
et al., 1987) examined the complexity of cutting plane
proofs, and in particular, those for the unsatisfiability
of formulae in propositional calculus. This was done
in terms of resolution theorem proving using the cut-
ting planes method. Note that it is straightforward
to produce an equation from a disjunction; e.g., con-
sider (a ∨a) which results in the equation a + b ≥ 1.
Each conjunct gives rise to an equation, and the set
forms an integer programming problem where a and
b take on 0-1 values. Note that linear programming
relaxation can be used to allow the a and b to take
on values in the interval [0,1] – i.e., relaxing the 0-1
requirement. Hooker (Hooker, 1988) provided a way
to handle generalized resolution by observing that the
resolvent of two clauses corresponds to a certain cut-
ting plane in integer programming. Buss et al. (Buss
and Clote, 1996) describe an extension to Cook’s cut-
ting plane refutation approach that applies to thresh-
old logic analysis. For some recent work using cut-
ting planes, see Devriendt et al. (Devriendt et al.,
2021) who use the method to improve state-of-the-art
pseudo-Boolean optimization. All these methods are
still exponential time complexity.
3 THE Chop-SAT METHOD
We look at the SAT problem geometrically: for an n-
variable problem, the corners of the hypercube are the
only possible SAT solutions, and the interior points
are possible atom probabilities assignments. Given
a Conjunctive Normal Form (CNF) sentence, S =
C
1
∧C
2
∧. .. ∧C
m
, over a set of Boolean variables
A = {a
1
,a
2
,...,a
n
}, each conjunct, C
i
, has at least one
truth assignment that makes it false (note that a ∨¬a
is not allowed). If there are k
i
literals in conjunct C
i
,
then there are 2
k
truth assignments that make it false,
where k = n −k
i
. A hyperplane can then be found for
each conjunct which separates the solutions from the
non-solutions. Moreover, this hyperplane can be po-
sitioned so as to cut the edges between non-solution
corners and their feasible region neighbors anywhere
in the range 0 < x ≤ 1 along those edges. The in-
tersection of the non-negative side of the hyperplane
with the initial feasible region (H
n
or ℜ
n
) produces
a convex feasible region. Continuing this process for
each conjunct, the result is a convex feasible region
which may or may not contain a corner of H
n
– i.e., a
solution for the CNF sentence.
Suppose A = {a
1
,a
2
,...,a
n
} is a set of Boolean
variables, and the set of A -formulas is the inductive
set of propositional well-formed formulas over A. A
Conjunctive Normal Form (CNF) sentence over A is
defined as a conjunction of a set of disjunctions of
literals.
S = C
1
∧C
2
∧. .. ∧C
m
C
i
= L
i
1
∨L
i
2
∨. .. ∨L
i
k
i
L
i
j
= a
i
j
or L
i
j
= ¬a
i
j
The Satisfiability Problem is defined as (Davis
et al., 1994):
Find an efficient algorithm for testing an A-
formula in CNF to determine whether it is
truth-functional satisfiable.
Chop-SAT: A New Approach to Solving SAT and Probabilistic SAT for Agent Knowledge Bases
49

By efficient, we understand “of polynomial complex-
ity.”
3.1 Basic Approach
The SAT problem is cast as a linear programming
problem:
Minimize f ·x
Subject to: Ax ≤ c
where each constraint is given by:
−α
i
·x ≤ c
i
A solution for the SAT sentence exists iff a solution
exists for the LP problem with x ∈{0,1}
n
.
Given a set of m conjuncts, C
i
,i = 1 : m, each con-
junct is used to produce a hyperplane of dimension
n −1 which separates the solutions (i.e., some sub-
set of vertexes of the n-dimensional hypercube) from
non-solutions. The hyperplane for the i
th
conjunct is:
α
i
·x + c
i
= 0
Each of these hyperplanes produces an inequality:
−α
i
·x ≤ c
i
A matrix, A, is produced where each row is the 1×n-
tuple α(i). An n ×1-vector, c, is constructed where
the i
th
element of c is c
i
.
The way these hyperplanes are constructed, it is
now possible to run the interior-point method for lin-
ear programming to find feasible points which min-
imize f
T
x for x ∈ X, where X is the feasible region
and f is an n-D vector. This allows points to be found
which lie on the feasible region boundary.
Given m conjuncts, C
i
,i = 1. ..m, then:
C
i
= L
i
1
∨L
i
2
∨. .. ∨L
k
i
k
Observe that:
• If k
i
= n, then this eliminates 1 solution (a vertex
of H
n
).
• If k
i
= n −1, then this eliminates 2 points (two
vertexes joined by an edge of H
n
).
• . . .
• If k
i
= 1, then this eliminates half the points in
the hypercube (all in a hyperplane of dimension
n −1).
The individual hyperplane is determined as fol-
lows. Let A = {1, 2,... ,n}, and I ⊆ A. Given
C
i
= L
1
∨L
2
∨... ∨L
k
i
, then define α
i
, the hyperplane
normal vector, as follows.
∀i
j
∈ I , α
i
(i
j
) = 1 if L
j
is an atom a
i
j
, else −1
∀m /∈ I , α
i
(m) = 0
α
i
:=
α
i
k α
i
k
In order to get the constant for the hyperplane
equation, a point must be found on the hyperplane.
This is selected so that the hyperplane cuts the edges
of the hypercube at a distance ξ from the center of H
k
.
This distance depends on the number k
i
of literals in
the conjunct:
d =k ξ
b
k
i
k
i
k
where b
k
i
is a k
i
-tuple of 1’s. Next:
∀i
j
∈ I , p(i
j
) = 0 if L
i
is an atom, else 1
∀m /∈ I , p(m) = 0
Then p is a non-solution vertex. To find a point, q, on
the hyperplane:
q = p + dα
i
This allows a solution for the constant, c, in the hy-
perplane:
c
i
= −(α
i
·q)
This yields the hyperplane equation:
α
i
·x + c = 0
and the resulting inequality:
−α
i
·x ≤ c
Note that the feasible region as defined above is
not necessarily bounded (e.g., when the initial fea-
sible region is ℜ
n
. Consider the simple case where
n = 2 and S = C
1
= a ∨b. Then the feasible region
resulting from this one cut is all points above the line
through the points [1;0] and [0;1]. An unbounded fea-
sible region indicates that a SAT solution exists.
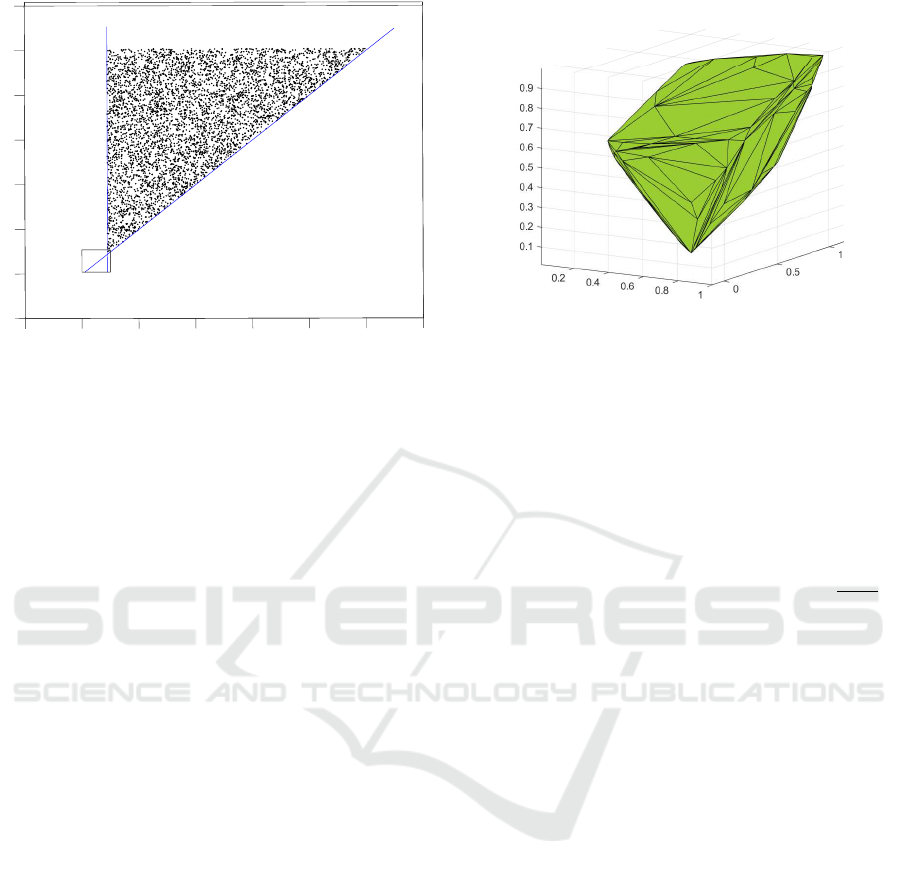
4 SOME EXAMPLES
4.1 2 D One Solution
Consider the two clauses in modus ponens:
1.a
1
2.¬a
1
∨a
2
Then the feasible region is indicated in Figure 1 as
the black point samples (the hyperplanes are shown
as blue lines), and this region is unbounded. The hy-
perplane found for conjunct 1 (with ξ = 0.9) is:
1.0a
1
+ 0a
2
−0.9 = 0
while the hyperplane for conjunct 2 is:
−0.7071a
1
+ 0.7071a
2
+ 0.7071 = 0
The solution is: a
1
= 1 and a
2
= 1.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
50
-2
0
2
4
6
8
10
12
-2
0
2
4
6
8
10
12
Figure 1: The Feasible Region for Unbounded Modus Po-
nens.
4.2 3 D: One Solution
As a final example, consider the case with 3 variables
with seven clauses that chop off all corners individu-
ally except [1;1;1]. Re-writing this in CNF yields:
1. : a
1
∨a
2
∨¬a
3
2. : a
1
∨¬a
2
∨a
3
3. : a
1
∨¬a
2
∨¬a
3
4. : ¬a
1
∨a
2
∨a
3
5. : ¬a
1
∨a
2
∨¬a
3
6. : ¬a
1
∨¬a
2
∨a
3
7. : ¬a
1
∨¬a
2
∨¬a
3
Then the hyperplane equations are:
C
1
: −0.5774a
1
−0.5774a
2
+ 0.5774a
3
+ 0.5831 = 0
C
2
: −0.5774a
1
+ 0.5774a
2
−0.5774a
3
+ 0.5831 = 0
C
3
: −0.5774a
1
+ 0.5774a
2
+ 0.5774a
3
+ 0.0058 = 0
C
4
: 0.5774a
1
−0.5774a
2
−0.5774a
3
+ 0.5831 = 0
C
5
: 0.5774a
1
−0.5774a
2
+ 0.5774a
3
+ 0.0058 = 0
C
6
: 0.5774a
1
+ 0.5774a
2
−0.5774a
3
+ 0.0058 = 0
C
7
: 0.5774a
1
+ 0.5774a
2
+ 0.5774a
3
+ 0.5716 = 0
The only solution is: [1;1;1]. The feasible region is
shown in Figure 2.
Figure 2: The Feasible Region for 3D with only [1;1;1] as a
Solution.
5 SOME PRELIMINARY
INVESTIGATIONS
Some useful facts have been found with respect to
feasible region properties which differentiate satisfi-
able from unsatisfiable CNF sentences. For example,
given a CNF sentence, S, such that no point in the
feasible region arising from S is more than
√
n −1/2
distant from the center of H
n
, then S is unsatisfiable.
Let H
n
be an n-D hypercube. A cut is
the removal from H
n
of a k-D hypercube,
H
k
⊂ H
n
, 0 ≤ k < n. A cut is effected as
follows. Let V = {v | v is a vertex of H
k
},
and define V
n
= {v | v is a vertex of H
n
, v /∈
V, v neighbors an element of V }. Let h
V
n
be the
(n −1)-D hyperplane defined by the points in V
n
where:
• v ∈V is on the negative side of h
V
n
• the open edge segments in H
n
that lie between ele-
ments of V and V
n
are on the negative side of h
V n
,
and
• v ∈V
n
is on the non-negative side of h
V
n
.
Let h
s
be the n-D half-space on the non-negative side
of h
V
n
. Then a cut produces a feasible region as fol-
lows:
F = H
n
∩h
s
Given a set of cuts, C = {C
i
}, then the feasible region
for C is F = ∩F
i
, where F
i
is the feasible region for
C
i
.
Lemma 1: Given H
n
and a set of cuts, C , if these
cuts remove every vertex of H
n
, then ∀H
1
⊂ H
n
(i.e.,
edges), H
1
∩F =
/
0, where F is the feasible region of
C .
Chop-SAT: A New Approach to Solving SAT and Probabilistic SAT for Agent Knowledge Bases
51
Proof: Consider an arbitrary H
1
⊂H
n
, and call its end
points A and B. Some cut removes A and in so doing
also removes the open line segment (A,B) since it is
on the negative side of h
V
n
. Since some cut removes
B, then all of H
1
is removed.
Lemma 2: If C is a set of hyperplane cuts that re-
moves all corners of H
n
and results in the feasible re-
gion F , then every 2-D face of H
n
is either removed
or at most one point remains, and it is in the center of
the 2D square:
∀H
2
⊂ H
n
,
H
2
∩F =
/
0
or H
2
∩F is one point at the center of H
2
Proof: Let A,B,C,D be the set of vertexes of a 2-
D square with edges {(A,B),(B,C), (C,D),(D,A)} in
H
n
; let E be the center of the square. Consider a cut
that removes A. Any cut will at the most leave the
triangle BCD in the feasible region. Cutting B leaves
at most triangle CDE in the feasible region. Cutting
C leaves at most segment DE in the feasible region.
Finally, cutting D leaves at most the point E. This
analysis holds for every 2-D square (i.e., any H
2
) in
H
n
.
From these results we conclude that the center of
H
k
⊂H
n
is located at distance
√
n−k
2
from the center of
H
n
. Thus, corners of H
n
are at the maximal distance,
and centers of edges are next. But both of these types
of points are removed according to the lemmas. Thus,
the maximal possible distance is to the center of a 2-
D square (H
2
) and is distance
√
n−2
2
from the center of
H
n
.
5.1 Maximal Volume Inscribed
Ellipsoid
The maximal volume inscribed ellipsoid (MVE) may
play a significant role in determining whether or not
a SAT solution exists. An ellipsoid is defined by the
equation:
S = {v |v = x + Es,||s|| ≤ 1}
where x is the center of the ellipse, and E is the ellip-
soid matrix that transforms points in the unit n-sphere
to points in the ellipse. If the feasible region is un-
bounded, then that can be detected (e.g., add the hy-
perplanes for increasingly large hypercubes and lin-
ear programming will show the bounds increasing ac-
cordingly) and satisfiability determined. Even if not,
the directions of the ellipsoids axes may point in the
direction of a solution. Importantly, the MVE can
be found in polynomial time (Khachiyan and Todd,
1990). Moreover, robust implementations exist and
can be used in practice (see (Zhang, 1998; Zhang,
2003)).
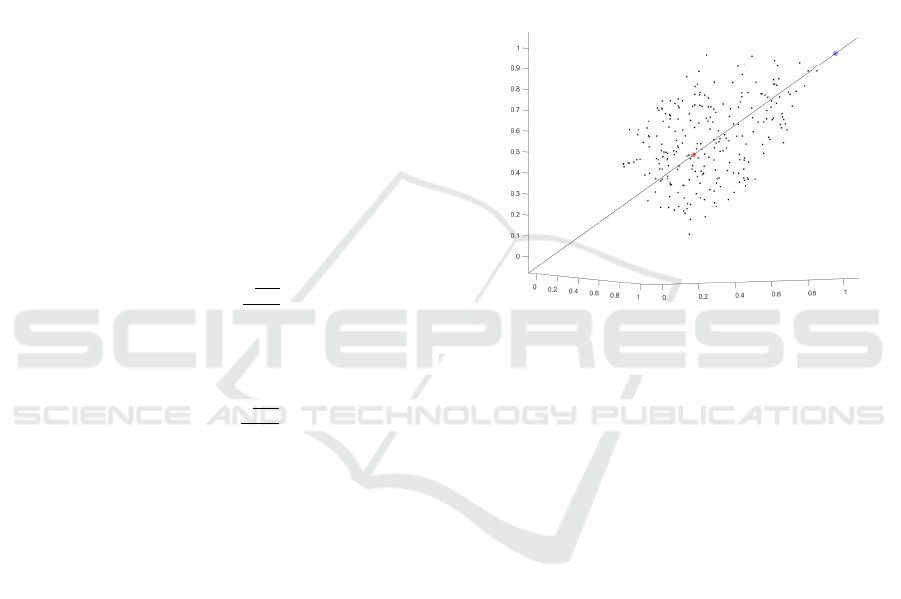
Consider the 3D example given above. Given the
center of the MVE, and the matrix defining it, the ex-
treme point on the ellipsoid (and in the feasible re-
gion) can be located. Figure 3 shows some points
sampled from the feasible region (blot dots), the cen-
ter of the ellipse (red circle/star), and extreme point
on the longest ellipsoid axis (blue circle/star), and the
major ellipsoid axis (black line). We are currently
studying how well this works in higher dimensions.
Taking a look at the Matlab output for the singular
Figure 3: Demonstration of how the Maximal Volume In-
scribed Ellipsoid in the Feasible Region Can Help Find a
Solution Along its Longest Axis.
value decomposition of the ellipsoid matrix, we find
that the major axis aligns with x = y = z line:
U =
-0.5774 -0.8165 0
-0.5774 0.4082 -0.7071
-0.5774 0.4082 0.7071
and that the most distance feasible region point along
that line is:
pe =
0.9987
0.9987
0.9987
5.2 PSAT Approximations
Another area of application is in determining proba-
bilities of atoms to help in the agent decision mak-
ing process. For a detailed example, consider the
Wumpus World problem popularized by Russell and
Norvig and described in (Russell and Norvig, 2009).
An agent looks for gold in a 4x4 grid where there are
pits and a Wumpus which can kill the agent. Russell
describes how to represent this using propositional
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
52
logic, and in our formulation there are 80 atoms (or
logical variables) and 402 conjuncts in the CNF. The
atoms correspond to 16 for a Breeze in a cell, 16 for
gold in a cell, etc. If the probability of a pit in each
cell (except the start cell) is 20%, then Monte Carlo
can be used to determine the ground truth a priori
atom probabilities. An agent would like to estimate
the probability of danger corresponding to each of its
possible actions, and this can be done using the feasi-
ble region for the CNF sentence.
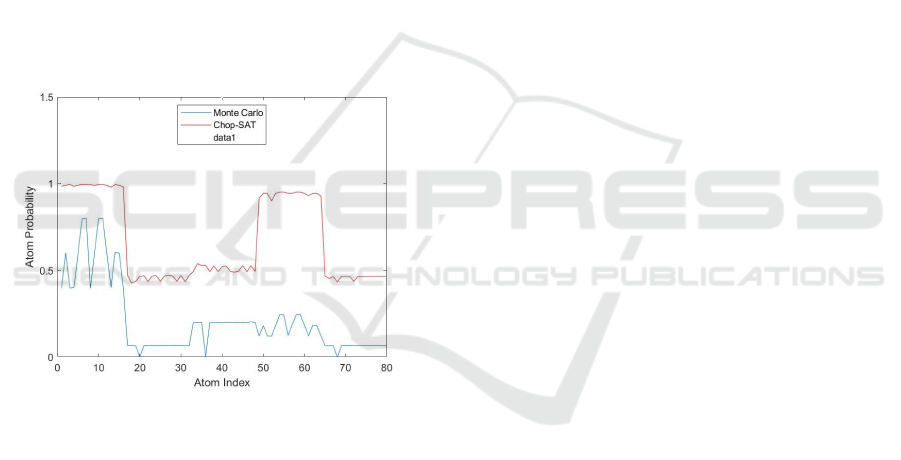
We have determined the feasible region for the
Wumpus World CNF, then found the solutions for
projecting onto all 80 axes (in both directions) ob-
taining 160 extreme points on the feasible region. We
then take the average of these to find an approxima-
tion to the atom probabilities. Figure 4 shows both the
Monte Carlo result as well as that from Chop-SAT. It
is clear that Chop-SAT provides a very good quali-
tative approximation produced just from the rules of
the game; this is adequate when an agent must decide
based on the lower probability of danger.
Figure 4: The Monte Carlo and Chop-SAT Estimates of the
Atom Probabilities for Wumpus World.
This is simply an approximation to the atom prob-
abilities; to get the model probabilities an approxima-
tion technique can be used. E.g., assume the atom
variables are independent, then compute the top 100
model probabilities and assume the remainder are 0.
Normalize these probabilities, and it is then possible
to calculate an estimate for any logical sentence over
the variables. We are also investigating how well this
works.
Note that our approach is a polynomial time ap-
proximation (i.e., very fast) more in line with our pre-
vious work (Henderson et al., 2020), and is very dif-
ferent from standard approaches like Nilsson (Nils-
son, 1986), or more recent works like Finger and De
Bona (Finger and Bona, 2015) which rely on SAT
solvers.
6 CONCLUSIONS
The position espoused here is that Chop-SAT mer-
its further study as a way to solve both discrete and
probabilistic SAT, and allows efficient and effective
solution approximation techniques. This in turn al-
lows a knowledge-based agent to improve its decision
making process. Note that the feasible region is pro-
duced very efficiently since converting conjuncts to
hyperplanes is linear time complexity, and obtaining
the properties of the feasible region is done using lin-
ear programming based on the interior point method
which is low polynomial time.
ACKNOWLEDGEMENTS
This work was supported in part by National Science
Foundation award 2152454.
REFERENCES
Buss, S. and Clote, P. (1996). Cutting Planes, Connectivity,
and Threshold Logic. Archive for Mathematic Logic,
35:33–62.
Chvatal, V. (1973). Edmonds Polytopes and a Hierarchy
of Combinatorial Problems. Discrete Mathematics,
4:305–337.
Chvatal, V. (1985). Cutting Planes in Combinatorics. Euro-
pean Journal of Combinatorics, 6:217–226.
Cook, W., Coullard, C., and Turan, G. (1987). On the
Complexity of Cutting-Plane Proofs. Discrete Applied
Mathematics, 18:25–38.
Dantzig, G. (1957). Discrete-Variable Extremum Problems.
Journal of Operations Research Society of America,
5(2).
Davis, M., Sigal, R., and E.J.Weyuker (1994). Computabil-
ity, Complexity, and Languages. Morgan Kaufmann,
San Diego, CA.
Devriendt, J., Gocht, S., Demirovic, E., Nordstrom,
J., and Stuckey, P. (2021). Cutting to the Core
of Psuedo-Boolean Optimization: Combining Core-
Guided Search with Cutting Planes Reasoning. In
Thirty-Fift AAAI Conference on Artificial Intelligence.
Elsevier.
Finger, M. and Bona, G. D. (2015). Probabilistic Satisfia-
bility: Algorithms with the Presence and Absence of a
Phse Transition. Annals of Mathematics and Artificial
Intelligence, 75:351–389.
Georgakopoulos, G., Kavvadias, D., and Papadimitriou, C.
(1987). Probabilistic Satisfiability. Journal of Com-
plexity, 4:1–11.
Gomory, R. (1958). Outline of an Algorithm for Integer
Solution to Linear Programs. Bulletin of the Americal
Mathematical Society, 64(5):275–278.
Chop-SAT: A New Approach to Solving SAT and Probabilistic SAT for Agent Knowledge Bases
53

Henderson, T., Simmons, R., Serbinowski, B., Cline, M.,
Sacharny, D., Fan, X., and Mitiche, A. (2020). Proba-
bilistic Sentence Satisfiability: An Approach to PSAT.
Artificial Intelligence, 278:71–87.
Henderson, T. C., Mitiche, A., Fan, X., and Sacharny, D.
(2021). Some Explorations in SAT. Technical Report
UUCS-21-016, University of Utah.
Hooker, J. (1988). Generalized Resolution and Cutting
Planes. Annals of Operations Research, 12:217–239.
Khachiyan, L. and Todd, M. (1990). On the Complexity
of Approximating the Maximal Volume Ellipsoid for
a Polytope. Technical Report TR No. 893, Cornell
University, Ithaca, NY.
Nilsson, N. (1986). Probabilistic Logic. Artificial Intelli-
gence Journal, 28:71–87.
Papadimitriou, C. (1981). On the Complexity of Integer
Programming. Journal of the Association of Comput-
ing machinery, 28:765–768.
Russell, S. and Norvig, P. (2009). Artificial Intelligence: A
Modern Approach. Prentice Hall Press, Upper Saddle
River, NJ, 3rd edition.
Sipser, M. (2012). Introduction to the Theory of Computa-
tion. Cengage Learning, Independence, KY.
Zhang, Y. (1998). An Interior-Point Algorithm for the
Maximum-Volume Ellipsoid Problem. Technical Re-
port TR98-15, Rice University, Houston, TX.
Zhang, Y. (2003). On Numerical Solution of the Maximum
Volume Ellipsoid Problem. SIAM Journal on Opti-
mization, 14(1).
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
54
