
Synchronizing Vehicle Routing and Photo-Voltaic Production
Alejandro Olivas Gonzalez, Alain Quilliot and Hélène Toussaint
Labex IMOB3, LIMOS Laboratory, UCA/CNRS, Cézeaux Campus, Clermont-Ferrand, France
Keywords: Routing, Scheduling, Bilevel Optimization, Machine Learning.
Abstract: We deal here with the routing and scheduling of electric vehicles in charge of performing internal logistic
tasks inside some protected area. Some vehicles are provided in energy by a local photo-voltaic facility with
limited production/storage capacities and time dependent production rates. In order to avoid importing energy
from outside (notion of self consumption) one must synchronize energy consumption and production while
minimizing both production and routing costs. Because of the complexity of resulting bi-level optimization
model, we handle it while shortcutting the production scheduling level with the help of surrogate estimators,
whose values are computed through a pricing mechanism and machine learning devices. According to this
purpose we design, implement and test several algorithms and get an evaluation of the potentiality of such
surrogate component based approaches. This work was carried on in partnership with national power company
EDF, in the context of the PGMO program.
1 INTRODUCTION
The notion of multi-level decisional (Caprara, 2014;
Chen, 2013; Colson, 2005; Dempe, 2015) model is
mainly related to situations when decision is shared
between several players, independent from each other
or tied together by some hierarchical or collaborative
link. Then, solving such a model aims at providing a
best scenario in case all the players accept to submit
themselves to a common authority (centralized
paradigm), or, if it is not the case (collaborative
paradigm), at helping them into the search for a
compromise (Kleinert, 2021). Standard approaches
involve decomposition schemes, which may be
hierarchical (Benders decomposition, Stackelberg
equilibrium,…) or transversal (Lagrangean
relaxation). Still in both case some major difficulties
remain: They are related to the sensitivity issue, which
means the way one may retrieve information from the
different levels in order to make them interact, and to
the collaborative issue, which may impose the players
to deal with incomplete information. It comes that a
trend, boosted by the rise of machine learning
technology (Krystow, 2018; Wojtuziak, 2012), is to
bypass some levels of the global model and replace
them by surrogate estimators, likely to approximate
the constraints and costs induced by the decisions
taken at those levels.
It is this point of view which we adopt here while
dealing with the joint management of local
photovoltaic energy production by a PV-facility
(Luthander, 2015; Smart Together, 2016) and its
consumption by a fleet of electric vehicles in charge
of logistic tasks inside a restricted area. This problem
arose in the context of the activities of IMOBS3
(Innovative Mobility) Labex in Clermont-Ferrand,
which conducts research on both autonomous electric
vehicles and solar energy, and of the national PGMO
program promoted by power company EDF. The fact
is that both market deregulation and emergent
technologies currently induce the rise of local
renewable energy producers (factories, farms and
even individual householders) who simultaneously
remain consumers (Balbiyad, 2019; Deb, 2018;
Grimes, 2008) and so make self-consumption become
an issue. A key operational feature of self-
consumption management happens to be the need for
synchronization between strongly time-dependent
energy production and its consumption.
So we consider here, on one side, a production
manager who runs a PV (Photo-Voltaic)-Plant, which
not only distributes energy between end-users
(electric vehicles) but also buys and sells energy on
the market. On the other side, we consider a fleet
manager who schedules and routes electric vehicles in
such a way that they efficiently achieve a set of
internal logistic tasks. Both interact through
Gonzalez, A., Quilliot, A. and Toussaint, H.
Synchronizing Vehicle Routing and Photo-Voltaic Production.
DOI: 10.5220/0011612500003396
In Proceedings of the 12th International Conference on Operations Research and Enterprise Systems (ICORES 2023), pages 127-134
ISBN: 978-989-758-627-9; ISSN: 2184-4372
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
127
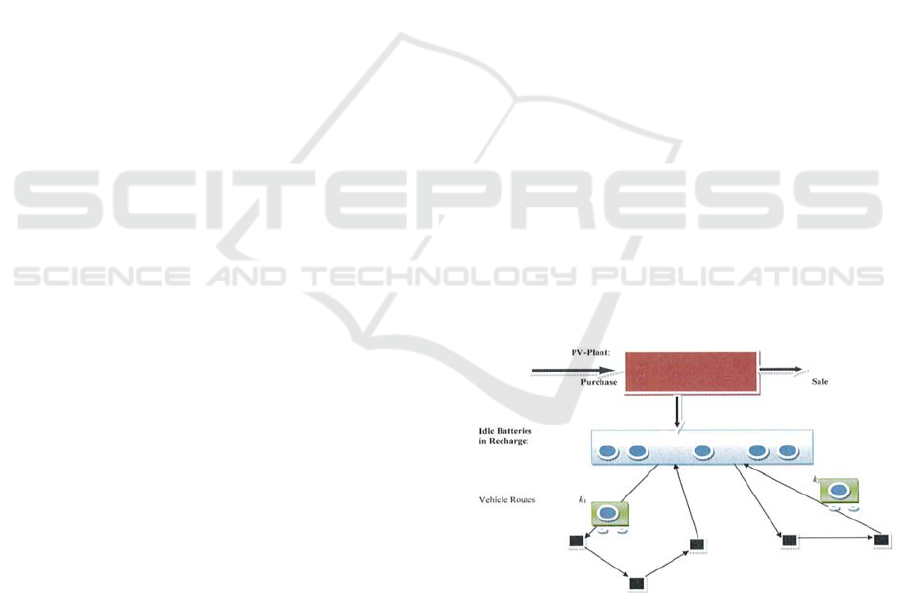
recharging transactions: In order to avoid that the
vehicles waste time while waiting for their battery to
be recharged, the PV-Plant relies on a set of identical
batteries, so that the vehicles only need to move
toward the PV-Plant and switch batteries in order to
be recharged. This plug out/in operation is
instantaneous. But limited storage and recharge
capacities impose both players to carefully
synchronize the strongly time-dependent energy
production and its consumption. This synchronization
requirement makes resulting bi-level decision
problem complex, even if we restrict ourselves to the
centralized paradigm. Though many searchers have
recently showed interest into the decisional problems
which may be related to the management of renewable
energy, they most often focused either on production
control and scheduling (Adulyasak, 2012 ; Irani, 2003,
Erdelic, 2019) or on the issues related to power
consumption (Albrecht, 2013; Koc, 2019), without
dealing with this synchronization issue (Bendali,
2021; Trotta, 2022). Our goal here is to address it by
shortcutting the part of the process related to
production management and handling the vehicle
routing master level while using a surrogate
formulation of the cost and constraints related to
production. We try two approaches: the first one is
based upon a parametric pricing mechanism; the
second involves a convolutional neural network. We
suppose, for the sake of simplicity, that our system
behaves in a deterministic way.
The paper is organized as follows. We first
(Section 2) introduce the PV_Prod_VRP problem.
We set it according to the MILP (Mixed Integer
Linear Programming) framework and discuss
different formulations. Next (Section 3), we present
the 3-step algorithmic framework for the handling of
PV_Prod_VRP through the use of surrogate
estimators. In Section 3.1 we provide the details of a
Branch and Cut algorithm which performs (Step 1)
the computation a collection of elementary trips; In
Section 3.2 we specify the surrogate estimators of the
production cost which we use in order to schedule the
elementary trips (Step 2): the first one relies on a
parametric pricing mechanism while the second one
involves a convolutional neural network. Section 4 is
devoted to numerical experiments.
2 THE PV_PROD_VRP PROBLEM
We consider a fleet of K small identical electric
vehicles initially located at a depot Depot = 0 and
which are required to perform VRP: Vehicle Routing
Problem tours, that means to visit a set of stations J =
{1,…, M} within a time horizon [0, TMax]. Moving
from station j to station k requires
j,k
time units and
an amount E
j,k
of energy. Recharge transactions take
place at Depot. In order to avoid that the vehicles wait
every time they recharge, the fleet relies on a set B of
identical batteries, with capacity C and charge speed
CS, and vehicles may switch their battery every time
they come back to Depot. This plug out/in operation is
considered as almost instantaneous. It comes that
while the vehicles are running with active batteries,
idle batteries are recharged at Depot before being used
again by the vehicles. For any battery b in B, V
b
denotes its initial load. We call elementary trip any
VRP sub-tour that a vehicle may perform without
recharging: such an elementary trip is a sequence
{Depot = j
0
, j
1
,…, j
s
, j
s+1
= Depot} such that the sum
j
E
j,Succ(j)
does not exceed capacity C.
In order to implement a self-consumption policy,
Depot is provided with a PV-Plant, that means with a
photovoltaic facility which assigns the batteries to the
vehicles and produces its own energy that it distributes
between the currently idle batteries or that it sells to
the market. In case this self-produced energy is not
enough, the PV-Plant can also buy energy to the
market. The time space [0, TMax] being divided into
small periods i = 1,…, N, all with same length p, we
denote by C
R
the recharge capacity, i.e the energy
which may be loaded into a battery during 1 period.
We also denote by R
i
the expected production of the
PV-Plant at period i, by A
i
the energy unit purchase
price at period i, and by B
i
the energy unit sale price.
Clearly we have, for any i, A
i
≥ B
i
. Figure 1 describes
the way the PV-Plant and the vehicle fleet interact.
Figure 1: The Global Self-Consumption System.
Resulting PV_Prod_VRP problem comes as follows:
PV_Prod_VRP Problem: {Simultaneously schedule
the vehicle fleet and the activity of the PV-Plant, in
such a way that:
Every station is visited once;
ICORES 2023 - 12th International Conference on Operations Research and Enterprise Systems
128

Every time a vehicle k comes back to Depot,
the PV-Plant assigns it a battery loaded to
make possible its next elementary trip;
The global energy load of the batteries at the
end of period N must be at least the same as at
the beginning of the process.
Some global cost is minimized, which
combines standard VRP cost with the
difference between the energy purchase cost
and the profit derived from energy sales}.
In order to formalize, let us first suppose that the
vehicles have been scheduled, which means that a
collection
0
of elementary trips has been
computed and each scheduled inside a set of
consecutive periods I(). We denote by
0
= {(,
I()),
0
} the resulting set of scheduled trips =
{(, I()). For any trip , we denote by E() its energy
consumption, by T() its duration, by S() its set of
stations, by E
Mean
() the quotient E()/Card(I()),
and we extend those notations to scheduled trips .
Then, PV_Prod sub-problem is about the way the PV-
Plant loads the batteries and assigns them to
scheduled trips :
ILP PV_Prod(
) MILP (Mixed Integer Linear
Program ) Model:
{Compute
{0, 1}-vector U = (U
,b
,
, b B): U
,b
= 1 iff b = b() is the battery assigned to ;
{0, 1}-vector = (
b,i
, b B, i = 1,…, N):
b,i
= 1 iff b is idle at period i;
X
A
= (X
A
i
, i = 1,…, N), X
B
= (X
B
i
, i = 1,…, N),
X
D
= (X
D
b,i
, b B, i = 1,…, N), which
respectively denote the energy bought, sold
and distributed to battery b, by the PV-Plant;
W = (W
b,i
, b B, i = 0,…, N): W
b,i
is the
energy inside battery b at the end of period i.
Objective Function: Minimize
i
A
i
.X
A
i
-
i
B
i
.X
B
i
.
Constraints:
For any b, i, W
b,i
≤ C
and X
D
b,i
≤ C
R
.
b, I
; (R1)
For any b, W
b,0
= V
b
; (R2)
b
W
b,N
≥
b
V
b
; (R3)
For any i,
R
i
+ X
A
i
= X
B
i
+
b
X
D
b,i
; (R4)
For any b B, i:
(1 -
b, i
) =
s.t i
I(
)
U
,b
≤ 1; (P1)
For any
,
b
U
,b
= 1; (P2)
For any b B, i: W
b,i
= W
b,i-1
+ X
D
b,i
-
s.t i
I(
)
E
Mean
().U
,b
. (P3)}
Explanation: (R1) means that we charge a
battery b only if it is idle. (R3) imposes the batteries
to be globally loaded with at least as much energy at
the end of the whole process as at the beginning. (R4)
tells the way energy is distributed between sale,
purchase and battery loading. (P1) means that b is
active at period i only if has been assigned to a unique
scheduled trip , active at period i. (P2) says that any
scheduled trip is assigned a unique battery b. (P3)
describes the evolution of a battery b from a period i
- 1 to next period i.
We may now formalize our global PV_Prod_VRP
problem. The VRP decision makes our K vehicles visit
at least once any station j in {1,…, M) and means a
collection
0
of scheduled trips = (, I()) such that:
For any i, Card({
0
s.t i I()} ≤ K. (S1)
For any j, Card({
0
s.t j S()} ≥ 1. (S2)
If we consider as standard VRP cost of
0
the
global riding time
T() (Driver Cost) then, a time
versus money coefficient being given, our
PV_Prod_VRP problem comes as follows:
PV_Prod_VRP Problem: {Compute a collection
0
of scheduled trips, such that (S1, S2) hold and which
minimizes the sum .(
0
T()) +
Val_PV_Prod(
0
), where Val_PV_Prod(
0
) is the
optimal PV_Prod(
) value}.
Denoting by the set of all possible scheduled
trips allows us to propose the following MILP
formulation of PV_Prod_VRP:
PV_Prod_VRP MILP Formulation:
{Compute:
{0, 1}-vector Z = (Z
, }: Z
= 1 means
that we select scheduled trip ;
X
A
, X
B
, X
D
, W, U and as in above PV_Prod
MILP model;
Objective Function:
Minimize
i
A
i
.X
A
i
-
i
B
i
.X
B
i
+ .
T().Z
;
Constraints:
(R1,…, R4, P1, …, P3) of PV_Prod;
For any i = 1,…, N,
s.t i
I(
)
Z
≤ K; (S1)
For any j = 1,…, M,
s.t j
S(
)
Z
≥ 1. (S2)
For any ,
b
U
,b
= Z
; (S3)
Explanation: (S3) means that any selected scheduled
trip must be assigned a battery.
An Example: Let us consider a customer set X = {A,
B, C, D, E} and 2 vehicles v
1
and v
2
, which follow
routes
1
and
2
as in figure 3 below: Numbers above
Synchronizing Vehicle Routing and Photo-Voltaic Production
129
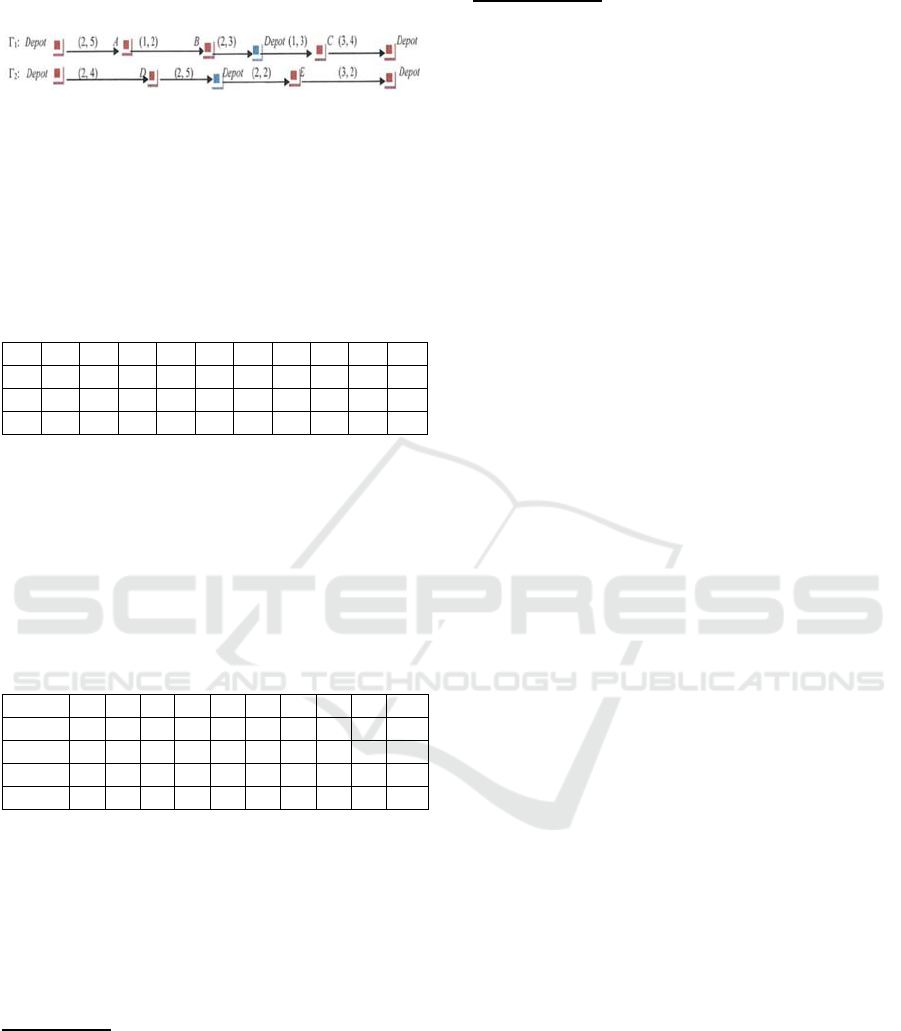
every arc respectively represent the time and the
energy required in order to traverse the arc.
Figure 2: Routes
1
and
2
.
We also suppose that: we are provided with 2
identical batteries b
1
and b
2
, both with capacity C =
12 and with initial loads respectively equal to 7 and
6; the time space is divided into 10 periods, all with
duration equal to 2; recharge capacity C
R
is equal to
3 and production data come as in table 1 below:
Table 1: PV Prices and Production Coefficients.
i 1 2 3 4 5 6 7 8 9 10
A
i
2 3 7 7 3 2 6 7 4 2
B
i
1 2 4 4 1 1 3 3 2 1
R
i
4 4 3 5 2 6 4 4 4 5
Then we derive a feasible solution from
1
and
2
1
starts at time 4 with battery b
2
, comes back to
Depot at time 9, waits in Depot until time 14
and starts until time 18 with battery b
1
;
2
starts at time 2 with battery b
1
, comes back to
Depot at time 6, waits in Depot until time 12 and
starts again with battery b
2
until time 16.
Vectors X
A
, X
B
and X
D
are given by table 2 below:
Table 2: Solution Values.
i 1 2 3 4 5 6 7 8 9 10
X
A
i
1 0 0 0 1 0 0 0 0 1
X
B
i
0 1 3 2 0 0 1 4 2 0
X
D
b1,i
2 * * 3 3 3 3 * * 3
X
B
b2,i
3 3 * * * 3 * * 2 3
Time versus money coefficient is equal to 2.
Related cost is: 2*17 (Vehicle Time Cost) + 5
(Energy Purchase) - 43 (Energy Sale) = - 4. We earn
38 money units, under a riding time of 17.
A Short Discussion: Variants of the PV_Prod
Model. In practice, production configurations may be
more complex. Let us mention here two variants:
First variant: Batteries remain identical, but may be
used in order to store energy and next sell it.
According to this hypothesis, a battery b may
receive energy at period i and sell it at period i’ > i.
The Recharge model must be updated through the
introduction of an additional vector Y
B
= (Y
B
b,i
, b B,
i = 1,…, N), which means the amount of energy sold
at any period i by battery b.
Second variant: A fixed storage unit is added to the
PV-Plant, which may be used either for sale or for
battery feeding when energy is scarce or expensive.
According to this hypothesis, such a Buffer
battery BUFF, with storage capacity C
BUFF
, initial
load V
BUFF
, recharge capacity C
R_BUFF
and discharge
capacity C
D-BUFF
, induces the introduction of the
following variables into the Recharge model:
X
BUFF
i
= energy sent from the PV-Plant to the
Buffer battery at i;
X
B_BUFF
i
= energy sold by the Buffer battery at i;
Y
BUFF
b,i
= energy sent by the Buffer battery to
battery b at i;
W
BUFF
i
= energy inside the Buffer battery at the
end of i.
3 PV_PROD_VRP HANDLING:
SURROGATE COMPONENTS
PV_PROD_VRP is a complex model, with 3 discrete
decision levels, respectively related to elementary
trips, scheduled trips, and batteries. Its MILP
formulation is hardly practicable and would badly fit
true life contexts, where decisions related to
respectively vehicles and the PV-Plant are likely to
depend on distinct players. Instead, we propose 2
approaches:
First approach: Solving above PV_Prod_VRP
MILP model, while restricting ourselves to a pre-
computed set of scheduled trips.
Second Approach: Solving the PV_Prod_VRP bi-
level model, while partially short-cutting the slave
PV_Prod level through the introduction of surrogate
constraints and criteria.
It is this second approach which we follow here.
3.1 Shortcutting the PV_Prod Level
Our purpose here is to compute the scheduled trip set
0
without explicitly involving the PV-Plant. But,
while the schedule -> I() must take into account
prices A
i
, B
i
and production rates R
i
, we can only say
that a well-fitted collection
0
requires small amounts
of both time and energy. So we should split the
routing part of the problem (computing the
elementary trips) from its scheduling part (scheduling
those elementary trips). This leads us to the following
parametric VRP_Surrogate process:
ICORES 2023 - 12th International Conference on Operations Research and Enterprise Systems
130

VRP_Surrogate Parametric Algorithm: Initialize
flexible scaling parameter ; Not Stop; Current best
solution Best_Sol is undefined;
While Not Stop do
1
st
step: Compute an elementary trip collection
0
which minimizes .
0
T() + .
0
E(),
2
nd
step: Turn
0
into a scheduled trip collection
0
, i.e compute intervals I(),
0
in a way
which meets some surrogate constraints
(SURR) and which minimizes some surrogate
cost ( -> I());
3
rd
step: Update and Stop; Solve PV_Prod(
0
)
and update Best_Sol; .
3.2 Step 1: Branch and Cut
Trying exact methods leads to set an ILP model. For
any subset A J = {1,…, M}, we set
+
(A) = {arcs (j,
k) such that j A and k A} and Cl(A) = {arcs (j, k)
s.t at least j or k is in A}. We get the following
Elementary_Trip ILP model, which involves a
specific SNS: Strong No Sub-Tour Constraint:
Elementary_Trip ILP model:
{Compute a (0, 1)-valued vector Z = (Z
j,k
, j, k =
0,…, M) in such a way that :
For any j,
k
Z
j,k
=
k
Z
j,k
= 1; (S2)
For any subset A of {1, …, M}, (SNS)
C.(
(j, k )
+(A)
Z
j,k
) ≥
(j, k )
Cl( A)
E
j,k .
Z
j,k
Minimize .(
j,k
Z
j,k
. T
j,k
,) + .(
j,k
Z
j,k
. E
j,k
,).
The explanation of above (SNS) constraint comes
with the statement below:
Theorem 1: {0, 1} vector Z meets (S2, SNS) iff arcs
(j, k) such that Z
j,k
= 1 define a collection
of sub-
tours
1
, …,
S
, with S =
k
Z
0,k
= such that:
For every s = 1,…, S,
s
starts from Depot = 0
and ends into Depot, and requires an energy
amount no more than C;
Every station j is visited exactly once by
collection
Constraints SNS may be separated in polynomial
time through a max flow (min cut) procedure.
Sketch of the Proof: Constraints (SNS) imply that Z
gives rise to a collection of sub-tours
0
, …,
S
,
which globally involve exactly once any station j, and
which all contain Depot = 0 (No Sub-Tour). If some
tour
s
spends more energy than capacity C, then a
subset A of {0, …, M+1} exists which makes Z violate
(SNS). We deduce the first part of our statement. As
for the second part, we see that, some vector Z
(integral or rational) being given, separating (SNS)
means searching for B = {0, 1, …, M} – A, such that:
j,k
B
Z
j,k
.E
j,k
C(
(j, k )
+(B)
Z
j,k
) <
=
j,k
Z
j,k
.E
j,k
(*)
In order to do it, we construct a network G
Aux
,
whose node set is{0, 1, …, M+1) and whose arc set
U
Aux
may be written U
Aux
= U Copy(U) with:
o U = {(j, k), j, k = 0,…, M, such that Z
j,k
≠ 0:
provided with a capacity w
u
= Z
j,k
.(C
- E
j,k
)};
o With any arc e = (j, k) in U, we associate an arc
u = Copy(e) = (j, M+1) provided with a capacity
w
u
= Z
j,k
.E
j,k
. Then arc set Copy(U) is the set of
all arcs Copy(e), e U.
But searching for B such that (*) means searching
for B { 0, 1, …, M}, such that:
u
UAux, s.t (origin(u)
B)
(destination(u)
B)
w
u
< .
It is known that, in case B exists, it may be
retrieved through the standard Min Cut algorithm.
Theorem 1 and related proof provide us with an
efficient separation procedure which opens the way
to the implementation of a Branch and Cut process.
3.3 Step 2: Surrogate Components
In order to enhance PV_Prod(
0
) feasibility, we
impose the following surrogate necessary (but not
sufficient) constraints:
For any period i, Card({
0
such that i
I()}) ≤ K. (S1)
For any i
0
= 1,…, N: C
R
.(
i ≤ i0-1
.n(
, i)) +
b
V
b
≥
s.t Start(
) ≤ i0
.E(),
where n(
, i) is the number of scheduled trips
idle at period i, and Start() is the starting period of
, and which means that we must be able to feed the
batteries in such a way that the trips becomes
possible. (SURR2)
Then, in order to make possible the use of any
surrogate estimator ( -> I()), we implement Step
2 while relying on a non deterministic local search
heuristic Scheduled_Trip(
0
, ). So, what remains
to be done is to discuss estimator .
3.3.1 Defining (
0
) According to a Pricing
Mechanism
The idea here is that the cost of a schedule ( -> I())
is determined by the distribution of resulting values
n(
0
, i), which means, for any period i, the number of
batteries which are available for recharge at i. Let us
denote by E = (
E()) the global charge which
has to be loaded into the batteries and by I = (
T()/p) the number of periods required in order to
perform all trips of
0
. The point is that if we suppose
Synchronizing Vehicle Routing and Photo-Voltaic Production
131
that all batteries receive a same charge E
Mean
= E/I at
every period when they are idle, then we get the cost
of the production process through the following
formula: Cost = I.Q
Stand
i, n(
, i)
, where standard price
Q
Stand
i, n
for the recharge of n idle batteries at period i
is given by:
Q
Stand
i,n
= A
i
.(n.E
Mean
– R
i
) if n.E
Mean
≥ R
i
and Q
Stand
i,n
= B
i
.(n.E
Mean
– R
i
) else.
Clearly, the energy amount loaded into an idle
battery b at period i may differ from E
Mean
. Still, above
reasoning suggests us to express the surrogate cost
( -> I()) = (
) involved into the
VRP_Surrogate algorithm as a sum
i
Q
i, n(
, i)
, where
Q
i,n
is the estimation of the cost induced by n batteries
in recharge (idle) at period i. Besides, we notice that:
If n(
0
, i).E
Mean
≥ R
i
, then Q
i,n
should increase
with A
i
;
If n(
0
, i).E
Mean
≤ R
i
, then Q
i,n
should decrease
as B
i
increases.
This leads us to set:
A
Mean
= mean value A
i
, i = 1,…, N; B
Mean
= mean
value B, i = 1,…, N;
Q
i,n
= Q
Stand
i,n
.(1 +
.(A
i
– A
Mean
)) if
n(
0
, i).E
Mean
(
0
) ≥ R
i
,
and else Q
i,n
= Q
Stand
i,n
.(1 +
.(B
i
– B
Mean
)),
,
being non negative flexible parameters.
3.3.2 Computing (
0
) Through a Neural
Network
Instead of relying on energy price coefficients Q
i,n
, we
use a neural network N_Energy in order to evaluate a
scheduled trip collection
0
. N_Energy is
implemented with the help of the TensorFlow open
software and trained with a large number (4000) of
PV_Prod(
) instances. It is designed as a
convolutional neural network. Such a network, whose
main purpose is to be adaptable to inputs with flexible
sizes, usually works in 2 (or more) steps: In the first
step, a same standard perceptron CM called
convolutional mask, is applied to fixed size neighbors
of the components of the input vector IN = (IN
m
, m
M), and yields an output vector OUT = (OUT
m
, m
M); In the next step, a pooling mechanism is applied
to Out, in order to compact it into the fixed size input
of another perceptron N_Pool which computes the
final output. In the present case this final output is a
number between 0 and 1, whose semantics are that
it should be possible to express the optimal value
VAL_PV_Prod(
0
) of PV_Prod(
0
) as a sum
Val_Min + .(Val_Max – Val_Min), where Val_Max
and Val_Min are respectively a lower bound and an
upper bound of VAL_PV_Prod(
0
). More precisely,
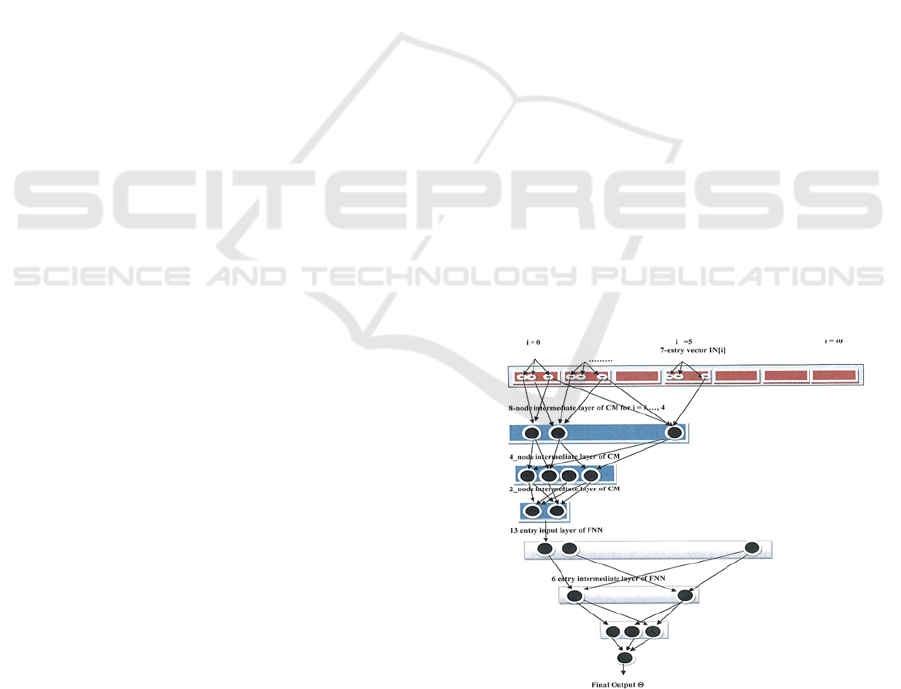
the main components of N_Energy are (see fig. 3):
Input layer: For any input
0
, A, B, R, V of the
PV_Prod problem, we homogenize it as a (N+1).7
vector IN, with IN[i] = (A*
i
, B*
i
, R*
i
, *
i
, Q
i
, C*,
C
A
*), with:
NA*
i
= A
i
/A
Mean
; B*
i
= B
i
/A
Mean
, where A
Mean
=
Mean value of the coefficients A
i
, i = 1,…, N;
*
i
=
s.t i
I(
)
E
Mean
(); *
0
= 0;
R*
i
= R
i
/R
Mean
; *
i
=
i
/R
Mean
, where R
Mean
= Mean
value of coefficients R
i
; R*
0
= (
b
V
b
)/R
Mean
;
Q
i
= n(
0
, i)/Card(B);
C* = C/R
Mean
; C
R
* = C
R
/R
Mean
.
Convolutional mask: CM works on any sub-vector
IN*
i
= (IN[i], …, IN[i+4]), which means an input with
35 input arcs. It contains 3 inner layers, respectively
with sizes 8, 4 and 2, and ends into an output layer,
with 1 input value OUT
i
. All 322 synaptic arcs are
allowed, together with standard biased sigmoid
activation functions whose derivative value in 0 is
equal to ½. .
The pooling mechanism: works by merging
consecutive values OUT
i
into a single value, in such
a way that we get an intermediate vector AUX, with
13 entries, all with values between 0 and 1.
Final Perceptron N_Pool: Once the pooling
mechanism has been applied, we handle resulting 13
dimensional vector AUX with a perceptron N_Pool,
with input layer with size 13, intermediate layers with
size 6 and 3, and a final layer with size 1.
Figure 3: The Neural Network N_Energy.
This network is complete in the sense that all 99
synaptic arcs are allowed, together with standard
biased sigmoid activation functions.
ICORES 2023 - 12th International Conference on Operations Research and Enterprise Systems
132
At the very end, we must learn 421 synaptic
coefficients. Figure 6 above shows the global
structure of N_Energy.
4 NUMERICAL EXPERIMENTS
Technical Context: We use a processor IntelCore
i56700@3.20 GHz, with 16 Go RAM, together with
a C++ compiler and libraries CPLEX12 (for ILP
models) and TensorFlow/Keras.
Instances: As for the PV side, we generate 2 integers
Q and N = Q.N
0
, N = 10,…, 40, Q = 2, …, 5 and split
the period set into Q intervals, corresponding to
different qualities (mean values MR
q
of the
production rate) of the weather and different level of
prices (means values MA
q
and MB
q
) on the market.
Related production rates R
i
are randomly generated
with uniform law inside interval [MR
q
/2, 3MR
q
/2]. By
the same way prices A
i
and B
i
are randomly generated
with uniform law inside respectively intervals
[MA
q
/2, 3MA
q
/2] and [MA
q
/2, 3MA
q
/2]. Proceeding
this way provides us with realistic instances,.
As for the vehicle part, we generate M (between
10 and 400) stations together as points with integral
coordinates in a 2D square, and derive , E values
according to the Euclidean and Manhattan distances.
Then we fix a target number S of elementary trips
together with their expected length (number of
periods) L. We derive both the capacity C and the
duration p of a period. We set B = .S.L/N, where
is a control parameter, and, for any b = 1,…, B, we
generate V
b
between C/3 and C. In order to make the
PV production match the demand from the vehicles,
we update the R
i
by doing in such a way that
i
R
i
=
H.S.C, H being a control parameter with value
between 0.5 and 2. Finally we generate the key
parameter C
R
in such a way that batteries may
globally receive at least .S.C energy units during the
whole process, being a control parameter with value
between 1.5 and 4.
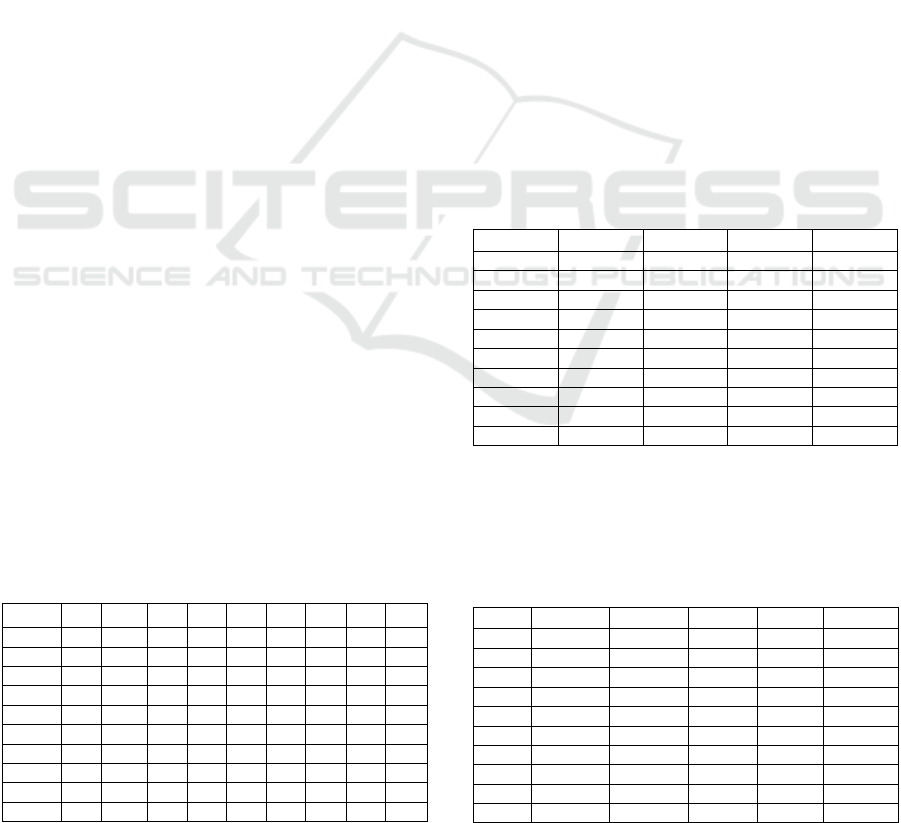
Table 3: Characteristics of the Instances.
Inst.
N M S Q L
H
1 20 40 10 3 4 2 1 2 0.5
2 20 70 15 4 5 3 0.5 3 1
3 20 100 20 5 6 4 0.2 4 2
4 30 50 10 3 4 2 1 2 0.5
5 30 80 20 4 6 3 0.5 3 1
6 30 120 30 5 8 4 0.2 4 2
7 40 100 20 4 5 2 1 3 1
8 40 200 40 6 10 4 0.5 4 2
9 50 150 20 4 5 2 1 3 1
10 50 300 40 6 10 4 0.5 4 2
Outputs. For every instance:
We apply the CPLEX12 library (Table 4) to the
general PV_Prod_VRP MILP model, with 30.S
scheduled trips (Card() = 30.S). Then we get (in
less than 1 CPU h), a lower bound LB_G, an upper
bound UB_G, CPU time T_G, and the value Relax
of the rational relaxation at the root.
We solve (Table 5) the Elementary_Trip ILP, with
= A
Mean
/2, while using the branch and cut
algorithm of Section 3.2.2 We get lower and upper
bounds LB_S1 and UB_S1, CPU time T_S1 and
the number C_S1 of SNS cuts generated during
the process. We also provide the upper bound
UB_W obtained without the SNS constraints.
We apply (Table 6) the global VRP_Surrogate
resolution scheme while relying on the pricing
mechanism and while setting = A
Mean
/2 and Q
i,n
= Q
Stand
i,n
for any i, n. We denote by W_Price
resulting PV_Prod_VRP value. We do the same
(Table 6) with 8 combinations (,
,
and
denote by W_Price_8 resulting value.
We apply (Table 6) the global VRP_Surrogate
resolution scheme while relying on machine
learning and denote by W_ML related value.
Those results may be summarized as follows:
Table 4: Behavior of the PV_Prod_VRP MILP model.
Inst. LB_G UB_G T_G Relax
1 735.3 735.3 628.4 344.5
2 951.3 951.3 265.3 312.0
3 709.2 999.2 159.7 413.5
4 322.1 508.2 3600 208.7
5 969.0 969.0 1819.3 611.7
6 1153.4 1486.3 3600 764.5
7 1972.7 3065.5 3600 1652.3
8 3386.9 4211.8 3600 3008.2
9 4923.0 9594.3 3600 4021.2
10 5956.6 8560.3 3600 5365.4
Comments: As expected, the global ILP model is in
trouble, even on small instances. Still, further results
(Table 7) will make appear that, at least for small M,
upper bound UB_G looks close to optimality.
Table 5: Behavior of the Elementary Trip Branch/Cut.
Inst. LB_S1 UB_S1 T_S1 C_S1 UB_W
1 884.4 884.4 1622.5 28 884.4
2 1435.3 1488.3 1 h 67 1522.5
3 1005.9 1202.9 1 h 79 1325.0
4 774.6 774.6 1254.8 503 880.3
5 1516.2 1654.2 1 h 468 1816.2
6 1886.3 1986.3 1 h 1435 2187.0
7 3891.7 4491.7 1 h 2960 4702.8
8 5020.3 5520.3 1 h 4121 Fail
9 12023.6 14077.2 1 h 4689 Fail
10 14773.0 17773.9 1 h 2867 Fail
Synchronizing Vehicle Routing and Photo-Voltaic Production
133
Comments: Strong no_sub_tour constraints
significantly increase our ability to manage the
Elementary_Trip problem through branch and cut.
Notice that, since the Elementary_Trip model tends
to overestimate the energy purchase value, values
UB_S1 are significantly larger than values UB_G
obtained in Table 4.
Table 6: Behavior of the Surrogate Components.
Inst. UB_G W_Price W_Price8 W_ML
1 735.3 735.3 735.3 740.8
2 951.3 966.8 951.3 980.6
3 999.2 1010.3 995.0 1030.0
4 508.2 512.6.2 504.3 508.2
5 969.0 986.5 972.6 1040.2
6 1486.3 1487.0 1487.0 1512.5
7 3065.5 3025.7 3003.5 3197.3
8 4211.8 4225.8 4200.6 4354.6
9 9594.3 9397.7 9365.9 9456.1
10 8560.3 8508.9 8475.1
Comments: Solving PV_Prod_VRP while relying on
the parametric pricing mechanism often behaves
better than the PV_Prod_VRP MILP. As for the the
machine learning oriented approach, the gap between
our best PV_Prod_VRP value and W_ML_ILP is in
average around 4%, with a peak at 7%.
5 CONCLUSIONS
We dealt here with synchronization between
consumption and production. We shortcut the
production sub-problem and replaced it by a
parametric surrogate sub-problem. But since in true
life solar energy production forecasting involves a
uncertainty, going further with machine learning
could help us in managing related risk of failure.
ACKNOWLEDGEMENTS
We thank both Labex IMOBS3 and PGMO program
for funding this research.
REFERENCES
Adulyasak Y., Cordeau J.F., Jans R. (2015).The production
routing problem: formulations and solution algorithms.
Computers & Operations Research, 55 , p 141-152.
Albrecht A., Pudney P. (2013). Pickup and delivery with a
solar-recharged vehicle. Ph.D. thesis Australian Society
for Operations Research .
Bendali F., Mole Kamga E., Mailfert J., Quilliot A.,
Toussaint H. (2021): Synchronizing Energy Production
and Routing; RAIRO-OR, 55 (4), pp. 2141-2163.
Caprara A., Carvalho M., Lodi A., Woeinger G.J (2014). A
study on the bilevel knapsack problem; SIAM Journal
on Optimization 24 (2), p 823-838.
Balbiyad S. (2019. Collective self consumption: computing
the optimal energy distribution coefficients under local
energy management; Report ENSTA/EDF OSIRIS.
Chen L., Zhang G. (2013). Approximation algorithms for a
bi-level Knapsack problem; TCS 497, p 1-12.
Colson B., Marcotte P., Savard G. (2005). Bi-level
programming: A survey; 4OR Vol 3 (2), p 87-107.
Deb S., Tammi K., Kalita K., Mahanta P. (2018). Impact of
electric vehicle charging station load on distribution
network; Energies 11 (1), p 178-185.
Dempe S., Kalashnikov V., Perez-Valdez G., Kalashikova
N. (2015).:Bi-level Programming Theory, Springer.
Erdelic T., Caric T. (2019). A survey on the electric vehicle
routing problem: Variants and solutions. Journal of
Advanced Transportation.
Grimes S., Varghese O., Ranjan S. (2008). Light, water,
hydrogen: The solar generation of hydrogen by water
photoelectrolysis. Springer-Verlag US.
Irani S., Pruhs K. (2003). Algorithmic problems in power
management. SIGACT News, 36, 2, p 63-76.
Kleinert T., Labbé M., I.jubic I., Schmidt M. (2021). A
survey on MILP in bilevel optimization. EURO Journal
on Computational Optimization 9, 21 p.
Koc C., Jabali O., Mendoza J., G.Laporte G. (2019). The
electric vehicle routing problem with shared charging
stations. ITOR, 26 , p 1211-1243.
Krzyszton M. (2018). Adapative supervison: method of
reinforcement learning fault elimination by application
of supervised learning. Proc. FEDCSIS AI, p 139-149.
Luthander R., Widen J., Nilsson D., Palm J. (2015).
Photovoltaic self-consumption in buildings: A review;
Applied Energy 142, p 80-94.
Smarter Together (2016). Reports on collective self-
consumption of photo-voltaic; Smarter Together.
Trotta M., Archetti C., Feillet D., Quilliot A. (2022). A
pickup and delivery problem with a fleet of electric
vehicles and a local energy production unit; Proc.
Triennial Symposium TRISTAN), 6 pages.
Wojtuziak G., Warden T., Herzog O. (2012). Machine
learning in agent based stochastic simulation;
Computer and Mathematics with App. 64, p 3658-3665.
ICORES 2023 - 12th International Conference on Operations Research and Enterprise Systems
134
