
Human Object Interaction Detection Primed with Context
Maya Antoun
a
and Daniel Asmar
b
Vision and Robotics Lab, American University of Beirut, Bliss Street, Beirut, Lebanon
Keywords:
Human Object Interaction, Scene Understanding, Deep Learning.
Abstract:
Recognizing Human-Object Interaction (HOI) in images is a difficult yet fundamental requirement for scene
understanding. Despite the significant advances deep learning has achieved so far in this field, the perfor-
mance of state of the art HOI detection systems is still very low. Contextual information about the scene
has shown improvement in the prediction. However, most works that use semantic features rely on general
word embedding models to represent the objects or the actions rather than contextual embedding. Motivated
by evidence from the field of human psychology, this paper suggests contextualizing actions by pairing their
verbs with their relative objects at an early stage. The proposed system consists of two streams: a semantic
memory stream on one hand, where verb-object pairs are represented via a graph network by their correspond-
ing feature vector; and an episodic memory stream on the other hand in which human-objects interactions
are represented by their corresponding visual features. Experimental results indicate that our proposed model
achieves comparable results on the HICO-DET dataset with a pretrained object detector and superior results
on HICO-DET with finetuned detector.
1 INTRODUCTION
Perception stands as one of the fundamental build-
ing blocks of a completely autonomous system. Liv-
ing beings rely on perception for their survival; we
perceive the environment around us, the objects we
interact with, as well as other humans. Despite its
apparent simplicity, visual perception is difficult to
realize in autonomous agents primarily because of
our shortcomings in understanding and replicating
human solutions that involve higher levels of cogni-
tion. In the past decade, and with the notable devel-
opments in deep learning, significant steps forward
have been achieved in scene perception and under-
standing. More specifically, and of particular interest
to this paper is the problem of Human-Object Interac-
tion (HOI). Given an input image, the aim of HOI is
to localize and estimate the interactions between hu-
mans and the objects around them by predicting the
triplet < human, predicate, ob ject >. Detecting these
interactions requires both knowledge of human and
object information as well as the possible interactions
between them.
Researchers have solved the HOI problem using
two types of methods: two-stage and single-stage
methods. The first stage in a two-stage method is
a
https://orcid.org/0000-0001-6017-5804
b
https://orcid.org/0000-0002-4932-9777
the detection of the humans and objects using an off-
the-shelf detector, then in the second stage the inter-
action between them is predicted using the extracted
features. In single-stage systems, the object detec-
tion and interaction prediction are done in parallel or
in an end-to-end manner. Most of the existing two-
stage systems, (Gkioxari et al., 2018; Gao et al., 2018;
Baldassarre et al., 2020; Hou et al., 2020; Li et al.,
2020a), rely on interpreting the scene based on its ap-
pearance as well as the geometric layout of objects
and people within the scene. In some of these works,
contextual information is only incorporated through
features from the union region of a human and object
bounding box which may not always be shown in the
features covering the union region. Other systems,
(Li et al., 2019; Wan et al., 2019; Song et al., 2020)
solve the HOI problem by estimating the pose of de-
tected people as an addition to the spatial and visual
features. However, the human performing the action
on the object is not always visible in the image and
can be occluded by different objects or other humans.
Therefore, relying on the human visual and pose for
action prediction is not sufficient.
Alternatively, other two-stage networks, (Liang
et al., 2020; Bansal et al., 2020a; Kim et al., 2020b;
Zhou et al., 2020; Li et al., 2020b; Sun et al., 2020;
Wang et al., 2020a; Xu et al., 2019; Gao et al., 2020;
Liu et al., 2020; Hou et al., 2021), predict the HOI
prediction by integrating semantics into the network
Antoun, M. and Asmar, D.
Human Object Interaction Detection Primed with Context.
DOI: 10.5220/0011612200003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 5: VISAPP, pages
59-68
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
59

Semantic Memory
General knowledge
about world
'Where was the
backpack last seen?'
'What is the
backpack used for?'
<Human, Carry, Backpack>
<Human, Hold, Backpack>
Episodic Memory
Traveling back in time
Figure 1: The perception behind HOI prediction. The episodic memory recalls contextual details from previous experiences
and the semantic memory recalls facts, concepts, and ideas about the objects and the scene in question. The episodic memory
and the semantic memory interplay and together help predict the correct interaction from the image.
architecture. Xu (Xu et al., 2019) construct a knowl-
edge graph between object and action based on the
semantic features of the ground-truth annotations of
training dataset and external source. Bansal (Bansal
et al., 2020a) integrate visual and spatial features with
general word embedding of humans and objects. Gao
(Gao et al., 2020) propose a dual relation graph by
using spatial-semantic representation to describe each
human-object pair. Liu (Liu et al., 2020) build a con-
sistency graph that encodes the relations among ob-
jects, actions and interactions. Liang (Liang et al.,
2020) build a dual-graph attention network that aggre-
gates contextual visual, spatial, and semantic infor-
mation. These works use general vector representa-
tion models to represent the actions and objects which
does not take into consideration the semantic context
of the object in the image expect for the established
edges between the nodes in the graphs. Thus, the
same action is represented by the same feature vec-
tor when mentioned with different objects.
To improve the HOI detection, recent works have
developed one-stage pipelines to detect HOIs in a sin-
gle shot. Single-stage methods, (Liao et al., 2020;
Wang et al., 2020b; Kim et al., 2020a), localize the in-
teraction with an interaction point or find the anchor
box of a human-object pair. Contextual features are
extracted around the detected point or box. The inter-
acting triplets are predicted by matching the detected
objects with the localized interaction and manually
searching for the threshold. Later, single-stage meth-
ods were improved by using end-to-end transformer-
based methods (Zou et al., 2021; Chen et al., 2021;
Kim et al., 2021; Tamura et al., 2021). A transformer-
based contextual self-attention mechanism is used to
detect the interacting pairs and predict their interac-
tion simultaneously. In these single-stage methods,
contextual features are extracted visually from the
image without any semantic representations. How-
ever, relying on visual context can be tricky in images
where details are not well visible, such as in paint-
ings and artwork. In our work we rely on improving
the semantic contextual representation of the objects
and verbs. Our model does not only rely on visual
features because context from semantic features helps
the model become more robust to any type of images
whether details, such as edges, are visible. Therefore,
we only compare our work to two-stage methods only.
To solve the problem of extracting context from
the semantic representation instead of the visual rep-
resentation, we rely on human psychology for action
perception. Nelissen (Nelissen et al., 2005) argue that
action information without knowledge about the iden-
tity of the object acted upon, is not sufficient to pro-
vide a full understanding of the observed action. Also,
Gallese (Gallese et al., 1996) state that the movement
analysis in humans depends on the presence of ob-
jects. The cortical responses for goal directed ac-
tions are different from the responses evoked when
the same action is executed but without the presence
of the object. Moreover, Bub (Bub and Masson, 2006)
show that observers build specific forms of gestural
knowledge obtained from the conceptual representa-
tions of the objects. This suggests the importance of
object priming in the representation of the action.
Two types of memories interplay to guide the vi-
sual search for the targets in a scene: (1) The episodic
memory, located in the hippocampus part of the brain,
answers questions about the position, colors, edges,
and context in which the object was last seen in pre-
vious experiences; and (2) the semantic memory, lo-
cated in the neocotex part of the brain, includes facts,
concepts and ideas independent of personal experi-
ence. The semantic memory answers general ques-
tions, such as the affordance or the name and type
or usual position of the object of interest. Seman-
tic information are derived from the accumulation of
the episodic memory. Therefore, they are interrelated
to form, together, a complete picture of the scene
(Figure1).
This paper is motivated by human psychology
where the human brain, to infer an interaction, relies
not only on the human preforming the action but also
on the object that they are interacting with. Similar
to vision transformers, we use BERT, a transformer-
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
60

based word embedding model for contextual semantic
representation of the action in context of the detected
object in the GCN. By using the visual features of the
object and the union box to find the similarity between
the interaction visual and semantic features, we build
the connection between both memories.
In this paper we apply the idea to HOI detection
by priming context into the encoding of actions (i.e.
verbs) at different levels of a deep network. We rely
on the detected object’s visual-spatial features as well
as its semantic relationship to actions. To benefit from
the influence of the object on the interaction predic-
tion, we change the semantic representation of the ac-
tions based on their presence with the object.
Our network consists of two streams. In the first
episodic memory stream, features corresponding to
the visual appearance, spatial features and the phys-
ical layout of people and objects are extracted as well
as that of the action. The second stream is the seman-
tic memory in which a graph convolutional (GCN)
network is built between the objects and the actions.
The objects and the actions are represented in the
affordance-based graph by their personalized contex-
tual vector representation extracted from a contex-
tual word embedding model. The verb-object depen-
dence is applied by representing the action features
as their word embedding when presented with the de-
tected object. The features from the episodic memory
stream and the semantic memory stream will be used
together to predict the human object interaction.
The main contributions of this paper include:
• We build an object related graph where the action
nodes are represented by their contextual embed-
ding when mentioned with the object which im-
proves the model performance by contextualizing
the graph.
• By feeding the visual features in the episodic
memory to the semantic features from the seman-
tic memory, we build the relationship between the
two memories and enhance the graph output.
• Our approach outperforms two-stage state-of-the-
arts on the challenging HICO-DET dataset with
a finetuned object detector and shows compara-
ble results with an object detector pretrained on
COCO.
2 SYSTEM OVERVIEW
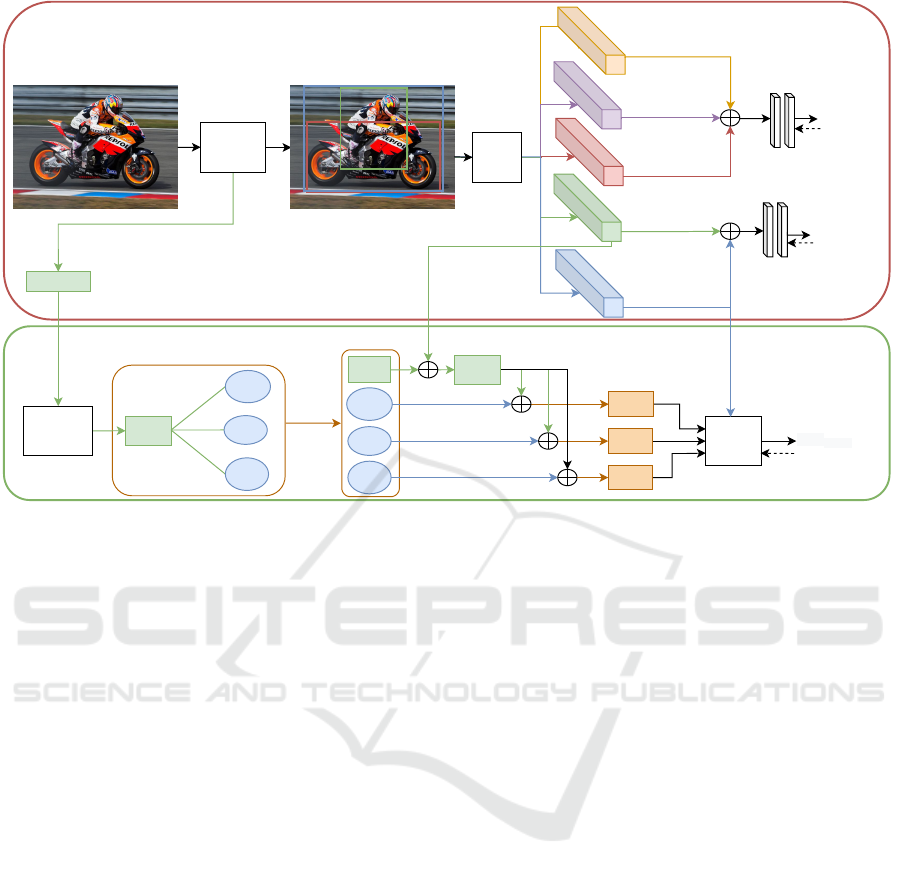
Figure 2 presents the flowchart of our proposed HOI
detection system. Given an input image, the objective
is to predict the triplet <human,verb,object> between
each candidate human-object pair.
The model consists of two streams: an episodic
memory stream, and a semantic memory stream. For
the episodic memory stream, we use a pretrained ob-
ject detection model to detect humans and objects in-
side query images. Then, using a feature extraction
backbone, visual features are extracted from each hu-
man F
v
H
and object F
v
O
individually on one hand, and
from the union of both human and object F
v
Int
on the
other hand. Moreover, a spatial attention feature map
F
sp
is created from the both human and object bound-
ing boxes. For the human pose features F
p
H
, 2D hu-
man body pose is extracted using a pretrained pose
estimation model (RMPE (Fang et al., 2017)). (Sec-
tion 2.1). These features are used together to predict
the HOI.
For the semantic memory stream, semantic infor-
mation is represented by the knowledge graph, which
is built from the ground truth annotations of the train-
ing data. To render the training dataset more compre-
hensive, we augment it with the ConceptNet database
(Speer et al., 2016), which builds additional nodes to
the verb-object graph based on the affordance knowl-
edge of the objects. First, semantic features from the
detected object’s class F
s
O
and its related verbs F
s
V
are
extracted using BERT(Devlin et al., 2018), a contex-
tual word embedding model. The object’s semantic
features F
s
O
are concatenated with its visual features
F
v
O
to create the object node F
V S
O
. The graph network
is updated through convolutions and the new interac-
tion features F
s
Int
are compared with its visual features
F
v
Int
for HOI prediction. (Section 2.2). Finally, the
loss functions calculated from each module are added
together, using a weighted sum, to get the final verb
prediction loss function.
2.1 Episodic Memory Stream
Given an input image, a pretrained object detec-
tion model (Faster-RCNN) detects the candidate hu-
mans and objects and estimates the coordinates of the
bounding boxes for humans BB
h
and objects BB
o
. A
feature extraction backbone, ResNet-101, is used to
extract visual features from the cropped human F
v
H
and objects boxes F
v
O
respectively. Moreover, visual
features from the union human and object boxes are
extracted and represent the interaction visual features
F
v
Int
. A spatial attention feature map F
sp
is generated
from the human and object bounding boxes following
(Bansal et al., 2020b) and (Chao et al., 2018).
We use the two channel binary image representa-
tion to model the spatial relationship between a hu-
man and an object. The union of the two bounding
boxes as a reference and re-scale it to a fixed size.
Then, a binary image with two channels is created:
Human Object Interaction Detection Primed with Context
61
Object
Detection
Model
Pose features F
H
p
Spatial features F
sp
Union features F
Int
v
Object features Fo
v
Human features F
H
v
Ride Motorcycle 0.95
Sit on Motorcycle 0.82
Wash Motorcycle 0.10
Object Affordance
Semantic Schema
Semantic Memory (Neocortex)
Similarity
FCs
FCs
Loss
O
Loss
H
Ride Motorcycle
Ride Motorcycle
Episodic Memory (Hippocampus)
Loss
Graph
'Motorcycle'
Word
Embedding
Model
F'
O
s
Sit on
F'
V1
s
Ride
F'
V2
s
wash
F'
V3
s
Updated Features
F
Int1
s
F
Int2
s
F
Int3
s
F
O
s
Feature
Extraction
Backbone
Sit on
F
V1
s
Ride
F
V2
s
wash
F
V3
s
GCN
F
O
vs
Figure 2: System flowchart: It consists of a visual-spatial module 2.1 where visual-spatial and pose features are extracted for
the object, human, and the interaction between them. In the knowledge graph module 2.2, semantic features are extracted
for the detected object and all the related candidate actions. The input features of the detected object-related actions are
replaced with their contextual ones. A cross entropy loss is extracted from each spatial-visual branch and a cosine similarity
is calculated between the candidate interaction semantic features and the interaction’s visual features.
value ones and zeros are filled in the human and ob-
ject bounding boxes respectively in the first channel.
In the second channel, value ones and zeros are filled
in the object and human bounding boxes respectively.
These two-channel binary images are fed into a two-
layer convolutional network to extract the spatial at-
tention feature map F
sp
. To extract the human pose
features F
p
H
, we follow the work of (Li et al., 2019).
We apply (Fang et al., 2017) to extract 17 keypoints
from the union bounding box. Then, the keypoints
are connected with lines of different gray value rang-
ing from 0.15 to 0.95 representing the different body
parts. Finally, the union box is reshaped to 64x64 to
construct the pose map F
p
H
.
For each detected human, the visual, spatial and
pose features are concatenated together and fed to a
fully connected layer followed by a Sigmoid activa-
tion function to find the action prediction score s
H
based on human information. Similarly, an action pre-
diction scores s
O
is found from the concatenation of
the object and union appearance features and feeding
them to a fully connected layer followed by a Sigmoid
activation function. These scores are used to extract
the individual cross entropy losses L
H
cross
for the hu-
man and L
O
cross
for the object.
2.2 Semantic Memory Stream
To model the semantic representation of each object
and action, we follow the work of (Xu et al., 2019).
A graph convolutional network G (GCN) (Kipf and
Welling, 2016) is built, and whose aim is to model
the relations between nodes N connected by edges E.
The purpose of building a GCN, in our system, is to
learn the features of the objects and candidate actions
nodes by inspecting the relationship between them.
An adjacency matrix is used to build the connection
between the nodes. In our case, undirected edges are
used where the connection between the nodes is the
same in both direction.
We first use the training dataset ground truth anno-
tation to extract the nodes and edges of the graph. To
get a richer graph, we use an external dataset, Con-
ceptNet, that includes all the affordance based rela-
tionships for all the objects in the database. To ensure
that the affordance of the object is well represented in
the graph, we extract all data with the usedfor rela-
tionship between them. This gives all possible triplets
<object,usedfor,action>. Thus the edges in the graph
connects the objects with the actions that might oc-
cur with them and no connections are established be-
tween objects and actions that are never mentioned
within the database. For example, if the detected ob-
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
62

ject is motorcycle, the actions that are connected to it
in the graph include sit on, ride, hold, wash, clean and
the actions that have no connection to it are eat, cook,
read. Adding these affordance based nodes enriches
the graph network with nodes that help in getting bet-
ter action predictions.
As a first stage, the detected object semantic fea-
tures are represented by a general word embedding
features F
s
O
. We rely on the pretrained BERT model
(Devlin et al., 2018) to extract vector representation
of each object word.
Based on the detected object, the interaction
phrase composed by the verb followed by the ob-
ject < verb, ob ject > is fed to the word embedding
model and the vector representation of the verb F
s
V
(first word) is extracted in context of the object. These
new representations are more specific to the detected
object, and their features are tailored to that object.
A context-based GCN is constructed where the object
nodes are represented by the concatenation of the ob-
ject semantic features F
v
O
and the verb nodes are rep-
resented by their semantic word embedding features.
The object-related verbs are represented by their con-
textual semantic features. whereas other non-related
verbs are represented by their general semantic fea-
tures. The adjacency matrix A of the GCN for all the
networks is defined by the binary values of whether
the nodes are connected or not.
Given the nodes features F
s
O
and F
s
V
and the adja-
cency matrix A, the semantic feature representation of
the nodes at the (i + 1)
th
layer are extracted using the
forward pass of the GCN defined as:
F
i+1
= σ(W
i
F
i
A
0
) (1)
where, A
0
is the normalized adjacency matrix, W
i
is
the learned weight at the i
th
layer and F
i
is the feature
vector representation of the nodes at the i
th
layer. σ is
the non-linear activation function applied to the out-
put of the convolution in order to represent the non-
linear features in latent dimension. The output of the
GCN is a feature vector representing the objects F
0
s
O
and the verbs F
0
s
V
.
At the output of the GCN, we concatenate the up-
dated object semantic features with its visual features
with that of the candidate verbs. This concatenation
represent the interaction semantic representation F
s
Int
in the context of the object. We found that the addition
of the object visual features yields a better represen-
tation of the object in the scene context. The cosine
similarity between the visual F
v
Int
and semantic inter-
action features is calculated, and the interaction with
the highest similarity score s
g
is considered to be the
graph prediction. Inspired by (Salvador et al., 2017),
the feature representations F
s
Int
and F
v
Int
are mapped
into the joint embedding space as: φ
v
= W
v
F
v
Int
+b
v
and φ
g
= W
g
F
s
Int
+b
g
respectively. W
v
and W
g
are the
learned embedding weights. Thus the cosine similar-
ity is loss is defined as:
L
cos
=
(
1 − cos(φ
v
, φ
g
) if y = 1
max(0, cos(φ
v
, φ
g
) − α) if y = 0
(2)
where, α is the margin and y is set to 1 if the candidate
verb is the ground truth and zero if not.
The calculated losses from the episodic memory
and the semantic memory modules are added, using a
weighted sum, together to get the final loss function:
L
total
= λ
1
L
cos
+ λ
2
L
H
cross
+ λ
3
L
O
cross
(3)
where, λ
1
, λ
2
, andλ
3
are added weights to each indi-
vidual loss function to control their contribution to the
total loss. The final target is to minimize the total loss
term in (3).
3 IMPLEMENTATION AND
EXPERIMENTS
3.1 Experimental Setup
Experiments are performed on the HICO-DET (Chao
et al., 2018) for Human Object Interaction prediction.
HICO-DET is a large dataset for detecting HOIs. It
includes 38,118 training and 9,658 testing images for
80 objects and 117 action verbs. HICO-DET anno-
tates the images for full 600 human-object interac-
tions. Interactions that occur less than 10 times in the
training are categorized as Rare. We have 138 Rare
and 462 Non-Rare interactions in the HICO-DET
dataset. We also use ConceptNet (Speer et al., 2016)
database to extract all the affordance based relation-
ships and use the action verbs as additional nodes.
ConceptNet includes data from other crowd sourced
resources, expert-created resources, and games with a
purpose such as Wiktionary which is a free multilin-
gual dictionary and OpenCyc.
We follow the method of (Chao et al., 2018) to
evaluate the performance of the proposed systems, us-
ing the metric of role mean average precision (role
mAP). A prediction for a human-object interaction is
considered correct if the human and object bounding
boxes have an Intersection over Union (IoU) greater
than 0.5 with the ground-truth boxes and if the verb
class label of the interaction of the pair is correct.
We rely on the pretrained Faster-RCNN (Ren
et al., 2015) for human and object detection for train-
ing. A threshold of 0.8 for human detection score and
Human Object Interaction Detection Primed with Context
63

Table 1: State-of-the-art comparison (mAP) on HICO-DET test set.
Default Known Object
Method Detector Backbone Full Rare Non Rare Full Rare Non Rare
Bansal (Bansal et al., 2020a)
HICO-DET
ResNet-101 21.96 16.43 23.62 - - -
VCL(Hou et al., 2020) ResNet-50 23.63 17.21 25.55 25.98 19.12 28.03
DRG (Gao et al., 2020) ResNet-50-FPN 24.53 19.47 26.04 27.98 23.11 29.43
IDN (Li et al., 2020a) ResNet-50 26.29 22.61 27.39 28.24 24.47 29.37
SCG(Zhang et al., 2020) ResNet-50-FPN 31.33 24.72 33.31 - - -
OURS ResNet-101 32.51 24.92 34.78 34.27 28.77 35.91
InteractNet(Gkioxari et al., 2018)
COCO
ResNet-50-FPN 9.94 7.16 10.77 - - -
GPNN (Qi et al., 2018) ResNet-50 13.11 9.34 14.23 - - -
iCAN(Gao et al., 2018) ResNet-50 14.84 10.45 16.15 16.26 11.33 17.73
Xu (Xu et al., 2019) ResNet-50 14.7 13.26 15.13 - - -
Bansal(Bansal et al., 2020a) ResNet-101 16.96 11.73 18.52 - - -
DRG (Gao et al., 2020) ResNet-50-FPN 19.26 17.74 19.71 23.4 21.75 23.89
VCL (Hou et al., 2020) ResNet-50 19.43 16.55 20.29 22.00 19.09 22.87
VSGNet (Ulutan et al., 2020) ResNet-50 19.80 16.05 20.91 - - -
ConsNet(Liu et al., 2020) ResNet-50-FPN 22.15 17.12 23.65 - - -
IDN(Li et al., 2020a) ResNet-50 23.36 22.47 23.63 26.43 25.01 26.85
SCG(Zhang et al., 2020) ResNet-50-FPN 21.85 18.11 22.97 - - -
OURS ResNet-101 22.73 21.37 23.14 25.86 24.57 26.24
Table 2: State-of-the-art comparison (mAP) on V-COCO test set.
Method Backbone Scenario 1 Scenario 2
InteractNet(Gkioxari et al., 2018) ResNet-50-FPN 40 -
GPNN(Qi et al., 2018) ResNet-101 44 -
iCAN(Gao et al., 2018) ResNet-50 45.3 52.4
TIN(Li et al., 2019) ResNet-50 47.8 54.2
DRG(Gao et al., 2020) ResNet-50-FPN 51 -
VSGNet(Ulutan et al., 2020) ResNet-152 51.8 57
IDN(Li et al., 2020a) ResNet-50 53.3 60.3
SCG(Zhang et al., 2020) ResNet-50-FPN 54.2 60.9
OURS ResNet-101 54.8 61.6
0.4 for object detection score is set. These values are
chosen experimentally. ResNet-101 (He et al., 2016)
is used as a feature extraction backbone. We finetune
Faster-RCNN during testing only. The object nodes
of the graph network are represented by their seman-
tic features. We rely on the pretrained BERT model
(Devlin et al., 2018) to extract vector representation
of each word that has a size of 1x768. To get the can-
didate verbs semantic features, we feed the sentence
composed of the verb and the object to BERT and ex-
tract the first word’s features as the verb features in
the context of the object. We perform two convolu-
tions on the input graph to get the final semantic vec-
tor representations of the object words and their con-
nected verbs of the size 1x512. LeakyReLU with a
negative slope of 0.2 (Wang et al., 2018) is used as
the activation function after each layer of the graph.
The total loss hyperparameters λ
1
, λ
2
are set to 1 and
λ
3
is set to 2. The margin for the cosine loss is set
to 0.1. We use Stochastic Gradient Descent (SGD) to
train the model for 10 epochs with a learning rate of
0.001, a weight decay of 0.0005, and a momentum of
0.9.
3.2 Experimental Testing and Results
We compare the mAP of our model with state-of-the-
art methods in Table 1 on HICO-DET dataset. We
report our results using a pretrained object detector
on MS-COCO dataset (Lin et al., 2014) and using a
fine-tuned object detector on Default and Known Ob-
ject settings. We observe that our system shows com-
parable results when using a pretrained object detec-
tor compared to other state-of-the-art two-stage sys-
tems. When we used the fine-tuned detector, we were
able to outperform state of the art two-stage meth-
ods by 0.97% and 1.03% on the Default and Known
Object setting of the HICO-DET. The main reason
why our model outperforms IDN with HICO-DET,
but not with COCO is that our model was able to
get higher cosine similarity between the interaction
semantic and visual features which is due to more
accurate detections. To analyze the contributions of
each component of our model, we perform an ablation
study and report the results in Table 3. We test our
model without taking into consideration the HOI pre-
diction from the human stream, including the visual
and spatial and pose feature. Then, we test it without
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
64
lie_on
text_on
type_on
sit_on
drink_with
hop_on
eat_at
sit_at
brush_with
throw
jump
kick
run
walk
kiss
hug
squeeze
lick
smell
flush
wash
clean
dry
talk_on
text_on
carry
repair
hold
read
no_interaction
A
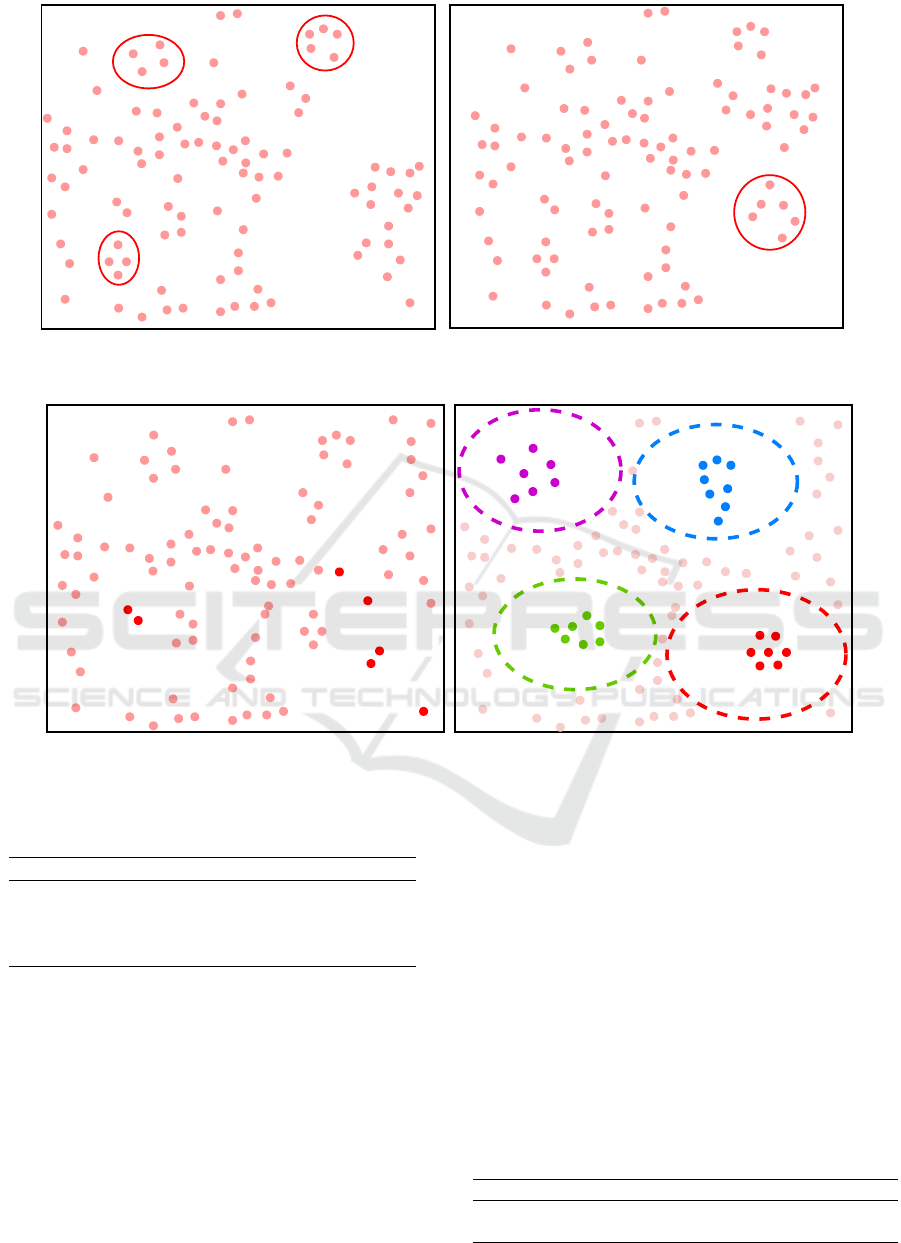
Figure 3: Visualisation of the input action class representations using tSNE (left) using BERT word embedding, and (right)
after modifying the representation of cellphone-related actions.
carry
text_on
hold
repair
read
talk_on
type_on
carry
talk_on
text_on
hold
repair
read
no_interaction
board
direct
drive
exit
row
sail
turn
pet
feed
kiss
hug
wash
ride
jump
clean
BD
A
grind
throw
peel
stir
pick
cook
drink
C
Figure 4: Visualisation of action class representations using tSNE at the output of the GCN (left) without object priming, and
(right) with object ‘cellphone’ priming.
Table 3: Ablation study of the proposed system on HICO-
DET in Default setting.
Full Rare Non Rare
OURS 27.26 21.92 28.85
OURS-w/o human 23.21 19.45 24.33
OURS-w/o object 22.58 18.89 23.68
OURS-w/o graph 21.13 17.34 22.26
the object stream, including the object and the union
visual features. At last, to show the importance of the
semantic graph we test the model without the seman-
tic memory stream.We can see from the results that
the graph has the largest influence on the HOI predic-
tion followed by the object and union features.
The results support our hypothesis about the im-
portance of the presence of the object in the interac-
tion prediction and the value of the semantic features
for better HOI prediction.
In Table 4, we test our model without object prim-
ing. The action verbs in the graph are represented by
their BERT word embedding vector without priming
them with the detected object. The results support our
main argument that object priming enhances the verb
representation and thus it improves the HOI predic-
tions. It improved the model mAP by 2.49 %, given
that object priming adds context to the semantic rep-
resentation of the related verbs, and thus enhances the
HOI prediction accordingly.
In Figure 3, we compare the different input rep-
resentations of the candidate actions using tSNE
(Maaten and Hinton, 2008). Figure 3 (left) represents
the general BERT word embedding on the candidate
action verbs. We can see that BERT represents the
Table 4: Ablation study of the semantic memory module on
HICO-DET in Default setting.
Full Rare Non Rare
OURS 27.26 21.92 28.85
OURS-w/o object priming 24.77 18.61 26.61
Human Object Interaction Detection Primed with Context
65

(a) From left to right: hold wine glass, hold clock, hold dog, hold book, hold baseball bat, hold cake.
975 ride boad
(b) From left to right: ride skateboard, ride boat, ride bicycle, ride snowboard.
Figure 5: HOI detections on the HICO-DET test images. Our model detects various forms of HOIs for same actions ‘hold’ in
(a) and ‘ride’ in (b) with different set of objects.
actions in a general contextual manner. In Figure 3
(right), we modify the representation of detected ob-
ject cell phone related actions by feeding the sentence
composed by the verb and the object to BERT and ex-
tracting the feature vector of the verb. We can see that
the actions related to cellphone are clustered together
without the use of GCN. These activities include text
on, talk on, hold, ..., and shows how much the addition
of the object context in the semantic module helps the
GCN by clustering the object-related actions at the in-
put.
Figure 4 shows the representations of the candi-
date actions at the output of the graph convolutional
network with and without the introduction of the de-
tected object at the input GCN level. From Figure 4
(left), we see that the actions related (in red) to the
detected object cell phone were not correctly clus-
tered together. From Figure 4 (left), we can notice
that Cluster A (in red), which refers to cellphone re-
lated activities, enclosed additional actions to the in-
put ones such as type on, pick up. Moreover, we can
see that the training of the model helped in cluster-
ing different activities related actions. For example,
Cluster B (in blue) refers to pet related activities such
as pet, walk, feed, kiss. Cluster C (in green) refers to
food related activities including peel, stir, pour. Clus-
ter D (in purple) refers to vehicle related activities
such as drive, board, load, sail.
Figure 5 shows qualitative results of our method.
We highlight the ability of our system to correctly pre-
dict interactions with objects that it was not trained
on. This is due to the fact that the same verb is con-
nected to similar objects in the training and external
datasets.
4 CONCLUSIONS
We present a novel model for Human Object Inter-
action detection which uses visual, spatial, pose, and
graph semantic features from the input image to get
the best output prediction. We showed that the pres-
ence of the object in the input semantic features plays
a fundamental role in enhancing the action prediction
by contextualizing the semantic representations in the
scene. Visual-spatial features are extracted from the
human, object, and interaction. A similarity is calcu-
lated between the visual-spatial features of the inter-
action and the semantic features from the graph out-
put of the candidate interactions. The external dataset
included all affordance based connection that can oc-
cur between a object and a verb. The constructed se-
mantic graph helped in predicting interactions that the
network was not trained on. We rely on prior work in
the episodic stream. We contextualize the action se-
mantic representation in the GCN. We connect both
memories through the concatenation of the object vi-
sual and semantic features and the comparison of the
interaction visual and semantic features. Our experi-
ments demonstrated that our system improved the per-
formance on HOI detection.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
66

ACKNOWLEDGEMENTS
The authors would like to acknowledge the American
University of Beirut (AUB) and the National Coun-
cil for Scientific Research of Lebanon (CNRS-L) for
granting a doctoral fellowship to Maya Antoun.
REFERENCES
Baldassarre, F., Smith, K., Sullivan, J., and Azizpour, H.
(2020). Explanation-based weakly-supervised learn-
ing of visual relations with graph networks. arXiv
preprint arXiv:2006.09562.
Bansal, A., Rambhatla, S. S., Shrivastava, A., and Chel-
lappa, R. (2020a). Detecting human-object interac-
tions via functional generalization. In AAAI, pages
10460–10469.
Bansal, A., Rambhatla, S. S., Shrivastava, A., and
Chellappa, R. (2020b). Spatial priming for de-
tecting human-object interactions. arXiv preprint
arXiv:2004.04851.
Bub, D. and Masson, M. (2006). Gestural knowledge
evoked by objects as part of conceptual representa-
tions. Aphasiology, 20(9):1112–1124.
Chao, Y.-W., Liu, Y., Liu, X., Zeng, H., and Deng, J. (2018).
Learning to detect human-object interactions. In 2018
ieee winter conference on applications of computer vi-
sion (wacv), pages 381–389. IEEE.
Chen, M., Liao, Y., Liu, S., Chen, Z., Wang, F., and Qian,
C. (2021). Reformulating hoi detection as adaptive set
prediction. arXiv preprint arXiv:2103.05983.
Devlin, J., Chang, M.-W., Lee, K., and Toutanova, K.
(2018). Bert: Pre-training of deep bidirectional trans-
formers for language understanding. arXiv preprint
arXiv:1810.04805.
Fang, H.-S., Xie, S., Tai, Y.-W., and Lu, C. (2017). Rmpe:
Regional multi-person pose estimation. In Proceed-
ings of the IEEE international conference on com-
puter vision, pages 2334–2343.
Gallese, V., Fadiga, L., Fogassi, L., and Rizzolatti, G.
(1996). Action recognition in the premotor cortex.
Brain, 119(2):593–609.
Gao, C., Xu, J., Zou, Y., and Huang, J.-B. (2020). Drg: Dual
relation graph for human-object interaction detection.
In European Conference on Computer Vision, pages
696–712. Springer.
Gao, C., Zou, Y., and Huang, J.-B. (2018). ican: Instance-
centric attention network for human-object interaction
detection. arXiv preprint arXiv:1808.10437.
Gkioxari, G., Girshick, R., Doll
´
ar, P., and He, K. (2018).
Detecting and recognizing human-object interactions.
In Proceedings of the IEEE Conference on Computer
Vision and Pattern Recognition, pages 8359–8367.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 770–778.
Hou, Z., Peng, X., Qiao, Y., and Tao, D. (2020). Visual
compositional learning for human-object interaction
detection. arXiv preprint arXiv:2007.12407.
Hou, Z., Yu, B., Qiao, Y., Peng, X., and Tao, D. (2021).
Affordance transfer learning for human-object inter-
action detection. arXiv preprint arXiv:2104.02867.
Kim, B., Choi, T., Kang, J., and Kim, H. J. (2020a). Union-
det: Union-level detector towards real-time human-
object interaction detection. In European Conference
on Computer Vision, pages 498–514. Springer.
Kim, B., Lee, J., Kang, J., Kim, E.-S., and Kim, H. J.
(2021). Hotr: End-to-end human-object interac-
tion detection with transformers. arXiv preprint
arXiv:2104.13682.
Kim, D., Lee, G., Jeong, J., and Kwak, N. (2020b). Tell
me what they’re holding: Weakly-supervised object
detection with transferable knowledge from human-
object interaction. In AAAI, pages 11246–11253.
Kipf, T. N. and Welling, M. (2016). Semi-supervised clas-
sification with graph convolutional networks. arXiv
preprint arXiv:1609.02907.
Li, Y.-L., Liu, X., Wu, X., Li, Y., and Lu, C. (2020a). Hoi
analysis: Integrating and decomposing human-object
interaction. Advances in Neural Information Process-
ing Systems, 33.
Li, Y.-L., Xu, L., Liu, X., Huang, X., Xu, Y., Wang, S.,
Fang, H.-S., Ma, Z., Chen, M., and Lu, C. (2020b).
Pastanet: Toward human activity knowledge engine.
In Proceedings of the IEEE/CVF Conference on Com-
puter Vision and Pattern Recognition, pages 382–391.
Li, Y.-L., Zhou, S., Huang, X., Xu, L., Ma, Z., Fang, H.-
S., Wang, Y., and Lu, C. (2019). Transferable in-
teractiveness knowledge for human-object interaction
detection. In Proceedings of the IEEE Conference
on Computer Vision and Pattern Recognition, pages
3585–3594.
Liang, Z., Guan, Y., and Rojas, J. (2020). Visual-semantic
graph attention network for human-object interaction
detection. arXiv preprint arXiv:2001.02302.
Liao, Y., Liu, S., Wang, F., Chen, Y., Qian, C., and Feng,
J. (2020). Ppdm: Parallel point detection and match-
ing for real-time human-object interaction detection.
In Proceedings of the IEEE/CVF Conference on Com-
puter Vision and Pattern Recognition, pages 482–490.
Lin, T.-Y., Maire, M., Belongie, S., Hays, J., Perona, P.,
Ramanan, D., Doll
´
ar, P., and Zitnick, C. L. (2014).
Microsoft coco: Common objects in context. In Euro-
pean conference on computer vision, pages 740–755.
Springer.
Liu, Y., Yuan, J., and Chen, C. W. (2020). Consnet: Learn-
ing consistency graph for zero-shot human-object in-
teraction detection. In Proceedings of the 28th ACM
International Conference on Multimedia, pages 4235–
4243.
Maaten, L. v. d. and Hinton, G. (2008). Visualizing data
using t-sne. Journal of machine learning research,
9(Nov):2579–2605.
Nelissen, K., Luppino, G., Vanduffel, W., Rizzolatti, G.,
and Orban, G. A. (2005). Observing others: multi-
Human Object Interaction Detection Primed with Context
67

ple action representation in the frontal lobe. Science,
310(5746):332–336.
Qi, S., Wang, W., Jia, B., Shen, J., and Zhu, S.-C. (2018).
Learning human-object interactions by graph parsing
neural networks. In Proceedings of the European Con-
ference on Computer Vision (ECCV), pages 401–417.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster
r-cnn: Towards real-time object detection with region
proposal networks. In Advances in neural information
processing systems, pages 91–99.
Salvador, A., Hynes, N., Aytar, Y., Marin, J., Ofli, F., We-
ber, I., and Torralba, A. (2017). Learning cross-modal
embeddings for cooking recipes and food images. In
Proceedings of the IEEE conference on computer vi-
sion and pattern recognition, pages 3020–3028.
Song, Y., Li, W., Zhang, L., Yang, J., Kiciman, E.,
Palangi, H., Gao, J., Kuo, C.-C. J., and Zhang, P.
(2020). Novel human-object interaction detection
via adversarial domain generalization. arXiv preprint
arXiv:2005.11406.
Speer, R., Chin, J., and Havasi, C. (2016). Conceptnet
5.5: An open multilingual graph of general knowl-
edge. arXiv preprint arXiv:1612.03975.
Sun, X., Hu, X., Ren, T., and Wu, G. (2020). Human object
interaction detection via multi-level conditioned net-
work. In Proceedings of the 2020 International Con-
ference on Multimedia Retrieval, pages 26–34.
Tamura, M., Ohashi, H., and Yoshinaga, T. (2021). Qpic:
Query-based pairwise human-object interaction detec-
tion with image-wide contextual information. arXiv
preprint arXiv:2103.05399.
Ulutan, O., Iftekhar, A., and Manjunath, B. S. (2020). Vs-
gnet: Spatial attention network for detecting human
object interactions using graph convolutions. In Pro-
ceedings of the IEEE/CVF Conference on Computer
Vision and Pattern Recognition, pages 13617–13626.
Wan, B., Zhou, D., Liu, Y., Li, R., and He, X. (2019).
Pose-aware multi-level feature network for human ob-
ject interaction detection. In Proceedings of the IEEE
International Conference on Computer Vision, pages
9469–9478.
Wang, S., Yap, K.-H., Yuan, J., and Tan, Y.-P. (2020a).
Discovering human interactions with novel objects via
zero-shot learning. In Proceedings of the IEEE/CVF
Conference on Computer Vision and Pattern Recogni-
tion, pages 11652–11661.
Wang, T., Yang, T., Danelljan, M., Khan, F. S., Zhang, X.,
and Sun, J. (2020b). Learning human-object interac-
tion detection using interaction points. In Proceedings
of the IEEE/CVF Conference on Computer Vision and
Pattern Recognition, pages 4116–4125.
Wang, X., Ye, Y., and Gupta, A. (2018). Zero-shot recogni-
tion via semantic embeddings and knowledge graphs.
In Proceedings of the IEEE conference on computer
vision and pattern recognition, pages 6857–6866.
Xu, B., Wong, Y., Li, J., Zhao, Q., and Kankanhalli, M. S.
(2019). Learning to detect human-object interactions
with knowledge. In Proceedings of the IEEE Confer-
ence on Computer Vision and Pattern Recognition.
Zhang, F. Z., Campbell, D., and Gould, S. (2020). Spatially
conditioned graphs for detecting human-object inter-
actions. arXiv preprint arXiv:2012.06060.
Zhou, T., Wang, W., Qi, S., Ling, H., and Shen, J. (2020).
Cascaded human-object interaction recognition. In
Proceedings of the IEEE/CVF Conference on Com-
puter Vision and Pattern Recognition, pages 4263–
4272.
Zou, C., Wang, B., Hu, Y., Liu, J., Wu, Q., Zhao, Y., Li, B.,
Zhang, C., Zhang, C., Wei, Y., et al. (2021). End-to-
end human object interaction detection with hoi trans-
former. In Proceedings of the IEEE/CVF Conference
on Computer Vision and Pattern Recognition, pages
11825–11834.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
68
