
Railway Switch Classification Using Deep Neural Networks
Andrei-Robert Alexandrescu
a
, Alexandru Manole and Laura Dios¸an
b
Department of Computer Science, Babes¸-Bolyai University, 1, M. Kogalniceanu Street, Cluj-Napoca, Romania
Keywords:
Machine Learning, Deep Learning, Image Classification, Railway Switches.
Abstract:
Railway switches represent the mechanism which slightly adjusts the rail blades at the intersection of two rail
tracks in order to allow trains to exchange their routes. Ensuring that the switches are correctly set represents
a critical task. If switches are not correctly set, they may cause delays in train schedules or even loss of lives.
In this paper we propose an approach for classifying switches using various deep learning architectures with
a small number of parameters. We exploit various input modalities including: grayscale images, black and
white binary masks and a concatenated representation consisting of both. The experiments are conducted on
RailSem19, the most comprehensive dataset for the task of switch classification, using both fine-tuned models
and models trained from scratch. The switch bounding boxes from the dataset are pre-processed by introducing
three hyper-parameters over the boxes, improving the models performance. We manage to achieve an overall
accuracy of up to 96% in a ternary multi-class classification setting where our model is able to distinguish
between images containing left, right or no switches at all. The results for the left and right switch classes are
compared with two other existing approaches from the literature. We obtain competitive results using deep
neural networks with considerably fewer learnable parameters than the ones from the literature.
1 INTRODUCTION
Railway transport represents one of the most efficient
ways of transporting, both people and cargo, from
one place to another (Growitsch and Wetzel, 2009).
The first train routes were used for industrial purposes
consisting initially of a small number of stations. As
more companies considered railway transport to be a
feasible way of transporting cargo and people, more
stations were built to support the growing infrastruc-
ture. This increase led to a higher demand for building
routes between stations.
In order to optimize the train traffic, switches were
introduced. Train track switches represent a break-
through mechanism which allows freight cars to ex-
change tracks and change routes by means of a set of
moving rails named blades. Generally, the engineer
driving the train is responsible for acting the switch
when the train is approaching it.
In the last decades, even though many advance-
ments were made in scene understanding for au-
tonomous driving, one problem has received a low
amount of attention: autonomous trains. These trains
should not require any human intervention for the
driving process.
a
https://orcid.org/0000-0003-4890-7819
b
https://orcid.org/0000-0002-6339-1622
At first glance, the problem of smart (or au-
tonomous) trains appears to be easier to solve than the
smart car’s problem. Trains have a restricted space of
movement, being constrained by the rails they move
on. However, switching tracks represents a more cru-
cial process than switching car lanes when changing
routes. Trains are allowed to switch tracks only at cer-
tain locations where a switch is present. A missed or
wrong track exchange would not only delay the train,
but it might also cause interference with other trains,
which may ultimately lead to fatal events. More-
over, the problem of railway segmentation faces more
difficult scenes with many different elements such
as ground embeddings, weed coverage and railroad
crossings.
This paper aims to provide answers to the follow-
ing research questions:
1. How reliable are the proposed methods for switch
classification given a dynamic environment (i.e.
the camera on the train)?
2. How can we surpass the current state-of-the-art
for the switch classification problem?
In this respect, we perform a set of experiments
for switch classification on various configurations us-
ing the most comprehensive dataset from the railway
scene available at the moment.
We aim to obtain competitive results by using
Alexandrescu, A., Manole, A. and Dios
,
an, L.
Railway Switch Classification Using Deep Neural Networks.
DOI: 10.5220/0011611600003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 4: VISAPP, pages
769-776
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
769

deep neural networks with fewer parameters than ex-
isting solutions from the literature. The solutions
we have found in the literature use networks such as
DenseNet161 (Huang et al., 2017) with around 20M
parameters or ResNet50 (He et al., 2016) with over
23M learnable parameters. Our experiments show
that high performance can be obtained using networks
with fewer parameters which would be faster in a dy-
namic environment such as the video camera on the
train. Both fine-tuned and trained from scratch mod-
els are used.
We also perform a pre-processing on the switch
images by considering more context around the
switches and eliminating some of them from the
dataset based on a few criteria. For this, three hyper-
parameters are introduced, namely α, β and γ whose
values are found empirically.
The rest of the paper is structured as follows. Sec-
tion 2 describes the existing approaches for switch
classification and our approach is presented in Sec-
tion 3. In Section 4 we present the obtained results
and an analysis of the results. Future considerations
are mentioned in Section 5. Conclusions and a brief
overview of the paper are given in Section 6.
2 RELATED WORK
At the moment, there are not many proposed solutions
for switch classification, nor are there many datasets
available for testing and validating this task.
Karak
¨
ose et al. have attempted to solve the switch
classification task by detecting crossings on the rail-
way line (Karak
¨
ose et al., 2016). They have used
only an image-processing approach. Their pipeline
features the Canny edge detector (Canny, 1986) and
the Hough transform (Duda and Hart, 1972) in order
to find points of intersection. Based on their posi-
tions, the switches are classified as belonging to one
of the following classes: Single left switch, Single
right switch, Symmetric switch, Compound switch,
Cross-switch or Crossover. They have obtained the
best results, between 80% and 90% success rate on
the first two classes. The downside of this work is
that less than 30 images were used to test the model
which might be biased towards easy-to-classify im-
ages. These images were taken from a camera in-
stalled on a train located in various testing environ-
ments.
Zendel et al. have constructed a public dataset for
semantic scene understanding for trains and trams,
called RailSem19. They have used deep learn-
ing methods for solving the semantic segmenta-
tion task (Zendel et al., 2019). They experimented
with the FRRN architecture (Full-Resolution Resid-
ual Network) (Pohlen et al., 2017), pre-trained on the
Cityscapes dataset (Cordts et al., 2016) and fine-tuned
using 4000 training images selected randomly from
the RailSem19 dataset. This architecture consisted of
an end-to-end model that combined feature extraction
and semantic segmentation based on the ResNet50
backbone (He et al., 2016) while preserving the full-
resolution of the input image on a separate stream.
The FRRN architecture comes in two flavours:
FRRN A and FRRN B which differ from each other in
terms of the input image size: FRRN A processes im-
ages of 256 × 512 pixels, while FRRN B processes
images of 512 × 1024 pixels. Pohlen et al. have
shown that FRRN B performs better than FRRN A
since it has a larger receptive field. Zendel et al.
have used the FRRN B version with an input size of
512×512. For the image classification task, they have
obtained an accuracy of 53.7% for Switch-Left and
62.9% for Switch-Right using the Densenet161 archi-
tecture (Huang et al., 2017) pre-trained on ImageNet
(Russakovsky et al., 2015). These values were ob-
tained from a multi-class classification in which other
classes were considered as well. They also experi-
mented with a one-vs-all classification task in which
they obtained outstanding results of up to 90% ac-
curacy for the left and right switch classes. When
training on only two classes, namely Switch-Left and
Switch-Right, they report an accuracy of 67% after 20
epochs of training.
Jahan et al. also tackled the switch classification
and detection task using deep neural networks (Jahan
et al., 2021). They have considered a one-stage ob-
ject detector called RetinaNet (Lin et al., 2017) pre-
trained on the Microsoft COCO dataset (Lin et al.,
2014). Besides training on RailSem19 (Zendel et al.,
2019), a custom private dataset named DLR is used
with 2500 instances of switches: 1272 left and 1218
right. For the classification task, they have classi-
fied left and right switches with a precision of 0.87,
0.93, recall of 0.94, 0.86 and F1-score of 0.90, 0.89
for the Switch-Left and Switch-Right classes respec-
tively. The results obtained by these researchers on
their custom dataset appear to be the current state-of-
the-art for switch classification and detection.
At the moment, the RailSem19 dataset con-
structed by Zendel et al. is the largest publicly avail-
able dataset containing annotated images taken from
the egocentric perspective of trains. For this reason
we extensively experiment with it in this article.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
770

3 OUR APPROACH
The problem of switch detection can be formulated
as an object detection task structured into two steps.
The first step is to find the regions of interest where
switches might be present. This can be done through
semantic segmentation (Alexandrescu and Manole,
2022). The second step is to crop the identified re-
gions and classify them.
In this paper, we describe our approach only for
the second step of this method. Unlike the state-of-
the-art, we will use the semantic segmentation masks
in our classification process in some representations.
The masks are considered to be correctly segmented.
3.1 Switch Classification Process
In our approach, the switch classification step tries
to classify images of switches using different well-
known deep learning architectures: VGG (Simonyan
and Zisserman, 2015), ResNet (He et al., 2016) and
MobileNet-V2 (Sandler et al., 2018). We have also
considered a custom simple architecture containing
one single convolution operation. By using this sim-
ple architecture, our goal was to understand whether
shallower networks would benefit learning.
In the following, we describe the formalism used
for our problem, the selected architectures and the
used dataset.
3.2 Formalism
A two-dimensional image can be perceived as a bidi-
mensional matrix with n rows and m columns. Its
topology is expressed and denoted by D = {1, ..., n}×
{1, ..., m}. We define img : D → E, where E may have
one of the following forms based on the image type:
• grayscale image: E = {0, ..., 255};
• RGB image: E = {0, ..., 255}
3
;
• binary image: E = {0, 1}.
Therefore, img(i, j) = e, where e ∈ E, i ∈
{1, ..., n}, j ∈ {1, ..., m}, (i, j) is a coordinate of the
image, and e is its value.
Similarly, the classification model considered in
this paper may be expressed as an algorithm which
has as input an image img : D → E and as output a
label lbl ∈ {0, ...,C − 1} where C is the number of
possible classes. For our classification problem, three
classes are considered: Switch-Left, Switch-Right and
None. A bounding box is characterized by four prop-
erties: x, y, w, h where x and y are its top-left coordi-
nates and w and h characterize its size, (x, y) ∈ D, w ∈
{1, ..., m}, h ∈ {1, ..., n}.
3.3 Architectures
The architectures we have used for switch classifica-
tion are SNet, ResNet-18 (He et al., 2016), VGG-11
(Simonyan and Zisserman, 2015) and MobileNet-V2
(Sandler et al., 2018).
SNet features one single convolutional layer with
2 filters of size 5×5 and a stride of 3×1. The convo-
lutional layer has 7355 parameters for images of size
64×64, therefore it is followed by a linear layer that
maps 2400 features to 3 output nodes, one for each
class. In order to add a slight regularization effect,
two dropout layers were introduced with probabilities
70% and 50% respectively after the ReLU activation
function (Agarap, 2018) of the convolutional layer.
The VGG (Visual Geometry Group) architecture,
inspired by AlexNet (Krizhevsky et al., 2012), was
used for large-scale image recognition (Simonyan and
Zisserman, 2015). It consists of multiple versions de-
pending on the depth of the network: from 11 to 19
layers which at the time was considered very deep. It
brings only a small increase in the performance of the
model, however it requires more parameters.
One issue of the VGG was that the gradient flow
was affected by a large number of layers, thus leading
to a slower learning process. It was also believed that
such networks were more prone to overfitting, mean-
ing that they would fail to generalize the learned rep-
resentations from the training dataset on new, unseen
samples. That claim was proved to be false in (He
et al., 2016).
In order to fix the issues introduced by VGG,
Residual Neural Networks, also named ResNets, were
introduced (He et al., 2016). The authors observed
that very deep neural networks were not affected by
an overfitting problem, however they were harder to
be optimized. To provide a solution to this, residual
connections were added between layers that would
copy the learned features from the shallower part to
the deeper part of the network.
The ResNet-18 architecture used in this paper has
only 11M parameters; it is smaller than ResNet-50
with more than 23M learnable parameters or other
larger variants.
The previously described networks consist of a
large number of parameters which might not be suit-
able for smaller, memory-constrained devices. There-
fore, a class of neural networks was introduced, called
MobileNets (Howard et al., 2017), which replaced the
classic convolutional operation with Depthwise sepa-
rable convolutions that consist of a depthwise con-
volution and a pointwise convolution. This split de-
creases the number of computations significantly.
The first version of MobileNets (Howard et al.,
Railway Switch Classification Using Deep Neural Networks
771

2017) had 4.2 million parameters. Newer versions
were introduced to decrease the number of parame-
ters and computations even more. The second version
of MobileNets (Sandler et al., 2018) has only 3.4 mil-
lion parameters.
In order to provide an answer to our first re-
search question and deploy this method of classify-
ing switches in a dynamic environment, we have con-
sidered deep neural network architectures with a rela-
tively small number of parameters. This does not only
allow for faster training and testing, but it also leads to
small inference times when used in combination with
cameras placed on trains in the wild.
3.4 Dataset
For our experiments, we have used the RailSem19
dataset (Zendel et al., 2019) which is presently the
most comprehensive dataset from the rails domain,
used to train the models that solve the switch classifi-
cation task. It is comprised of 8500 images taken from
the ego-view of the train. The images are taken from
38 countries in varying weather and lighting condi-
tions. The samples contain both ground-truth masks
(for the rails segmentation process) and bounding
boxes for the switches, classified with either switch-
left or switch-right annotations, among other classes
which are not relevant for our problem.
According to Zendel et al., there should be 1965
and 2083 bounding boxes for classes switch-left and
switch-right respectively. After closer examination of
the data, only 1963 bounding boxes for switch-left and
2080 bounding boxes for switch-right were counted.
Despite this small inconsistency, the number of sam-
ples for each class is balanced enough for us not to
make any weight adjustments to the loss function.
The bounding boxes for the switches provided in
the dataset are constrained to a small view of the
rail track, and sometimes they do not contain the full
blades required for the switch exchange. In order to
fix this issue, we have considered multiple scales of
the images in a similar fashion to what has been at-
tempted in (Zendel et al., 2019). We use a hyper-
parameter α in order to retrieve the switch bounding
box as well as the area around it. If α > 1, then the
bounding box is extracted together with a padding
which is decided by α and the size of the original
bounding box. The coordinates of these boxes are
computed as in Equation 1:
w
′
= w ∗ α
h
′
= h ∗ α
x
′
= x − (w
′
− w)
y
′
= y − (h
′
− h)
(1)
where w, h, x, y are the coordinates of the original
bounding box and w
′
, h
′
, x
′
, y
′
are the coordinates of
the upscaled bounding box. After the padding is
applied, the resulting bounding boxes are resized to
224×224 pixels such that the data samples are con-
sistent. Figure 1 illustrates how various values for α
influence the original bounding box.
We have introduced another hyper-parameter to
eliminate the bounding boxes that are smaller in width
or height than β pixels. After some experiments,
the chosen value for β is set to be 30. Thus, all
bounding boxes with width or height less than 30 are
not considered. This step led to the removal of 980
switches from the dataset, comparatively to (Zendel
et al., 2019) where 1049 switches were removed by
using a β = 28.
The last hyper-parameter used is γ for eliminating
the images that have too many pixels of the rails class.
This issue may occur for small bounding boxes, how-
ever it was observed that even for large values of β,
there still were some resulting bounding boxes with
too many positive pixels, increasing the difficulty of
the task for the classifier. In order to fix this, the γ
hyper-parameter is used and set to 0.75. This means
that bounding boxes with more than 75% rail pixels
are eliminated.
3.5 Switch Classification Approach
We consider switch classification as an image classi-
fication task with three classes: Switch-Left, Switch-
Right and None.
We have performed a comprehensive set of ex-
periments using different images of switches of size
224 ×224 pixels. We have used grayscale images, se-
mantic segmentation mask images, augmented mask
images, and a combined representation of grayscale
and mask images. The first two types are self-
explanatory. The image augmentations used were
shifting with a factor of 0.07 on X and 0.05 on
Y axes, and rotating them with at most 10°. The
combined representation is depicted in Figure 2.
It implies concatenating channel-wise (depth-wise)
the single-channel grayscale image together with the
mask which also has a single channel, leading to a
two-channel volume, and the same dimensions as the
original images. By concatenating the two possible
switch representations, the neural networks benefit
from more context when learning to model the data.
The used SNet architecture has the least number
of parameters: 97835, while ResNet-18 and VGG-
11 have 11 and 34 million parameters respectively.
The MobileNet-V2 architecture has only 3.4 param-
eters. A batch size of 32 was chosen with an 80:20
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
772
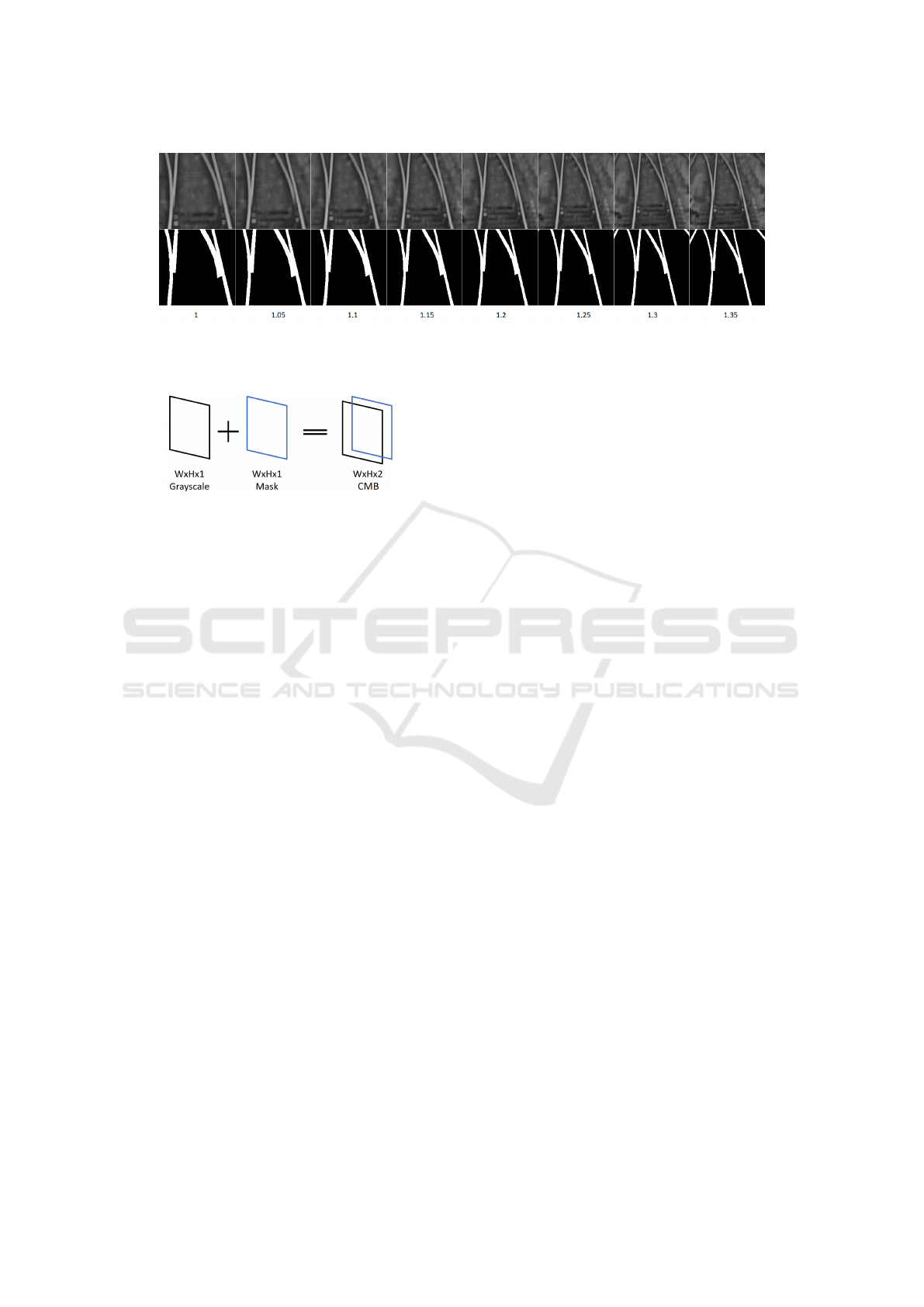
Figure 1: Comparison between bounding boxes for switches based on various α values. Each column corresponds to a
different α value. The first row contains the grayscale image of a switch. The second row contains the segmentation mask for
the image.
Figure 2: Channel-wise concatenation of grayscale and
mask images to obtain the combined (CMB) representation.
data split between training and validation samples. In
order to gain a sense of the overall performance of
the trained models, 8 different seeds were considered
for each test. Adam (Kingma and Ba, 2015) with ini-
tial learning rate of 1e
−4
was used for optimization.
Two Nvidia Tesla K40X GPUs were used for train-
ing. The experiments were written in Python using
the PyTorch library. The image augmentations were
applied with a probability of 50%.
One of the purposes of these experiments was to
identify the best α hyper-parameter as well as to de-
termine whether the augmentations improve the per-
formance of the model on unseen data. Since the
masks for each switch were available, we have exper-
imented with them to see whether our results obtained
on the masks are better than the ones on the images.
4 RESULTS
This section details the results of our approach for the
switch classification task. We focus on a specific set
of metrics and provide insight into the obtained re-
sults. The research questions are answered at the end.
4.1 Metrics
In order to evaluate the obtained results, we have used
the following metrics: Accuracy, Precision, and Re-
call, as these are ubiquitous metrics for image classi-
fication tasks.
We have computed the overall Accuracy, Pre-
cision, and Recall metrics for each of the classes:
Switch-Left, None and Switch-Right. Since the con-
sidered dataset was balanced and the number of in-
stances for each class is almost identical, the accuracy
metric is meaningful. The precision and recall metrics
were computed as well in order to offer a robust view
over the performance of the models.
Experiments were conducted using various values
for the α hyper-parameter taken from the set {1, 1.2,
1.35} and fixed values for β = 30 and γ = 0.75. Out of
all results, only the most meaningful ones are present
in Table 1 for each architecture.
The Config column from the table has the follow-
ing structure: architecture-alpha-type. The type can
be: omitted for grayscale images, AM for augmenta-
tions on the masks and CMB for the combined repre-
sentation. The type parameter can also take the value
PT which means that the architecture was pre-trained
on ImageNet (Russakovsky et al., 2015). The alpha
parameter can take values from the set {1.2, 1.35,
ALL} where ALL implies training on all α values.
The first six rows present the best configuration
found for each of the considered networks configu-
rations. The last two rows contain the results ob-
tained by other selected works that use the RailSem19
dataset on two classes: Switch-Left and Switch-Right.
Zendel et al. reach an accuracy score of 67% by ex-
panding the crops and ignoring samples with less than
28x28 pixels. The final row presents the results ob-
tained by Jahan et al., focusing on the precision and
recall scores.
We observe that training on larger α values yields
better results compared to an α = 1 which resembles
the original image crops. As expected, training and
validating on all α values at the same time increases
the results significantly.
In Figure 3 the results are showcased in a for-
mat easy to visualize. Similar notations to Table 1
are used. In addition, A denotes the results for aug-
mented grayscale images. These visualizations show
Railway Switch Classification Using Deep Neural Networks
773

Table 1: Comparison between our best results for each model and the literature’s results for the switch classification. The
bottom results are copied from the compared literature articles. They do not experiment on three classes as we do.
Config Accuracy Precision-Left Recall-Left Precision-None Recall-None Precision-Right Recall-Right
SNet-1.35-AM 77.17 ± 3.51 70.53 ± 4.11 71.03 ± 2.30 90.11 ± 6.74 90.09 ± 4.27 71.13 ± 2.49 70.77 ± 4.51
ResNet-1.35-CMB 84.12 ± 1.42 81.74 ± 4.89 78.59 ± 4.35 94.24 ± 2.63 92.53 ± 2.60 77.32 ± 2.83 81.58 ± 5.17
VGG-1.2-AM 88.52 ± 1.51 81.48 ± 2.39 83.76 ± 4.94 99.67 ± 0.48 99.59 ± 0.78 83.96 ± 5.04 81.88 ± 2.74
Mobile-1.35-CMB 85.65 ± 0.62 82.18 ± 2.82 82.03 ± 2.60 94.18 ± 1.84 93.10 ± 2.32 80.59 ± 2.25 81.49 ± 4.43
Mobile-ALL 89.94 ± 0.61 89.55 ± 1.61 83.80 ± 2.16 93.30 ± 0.77 98.39 ± 0.81 86.87 ± 1.83 87.47 ± 1.85
Mobile-ALL-PT 95.93 ± 0.20 94.54 ± 1.16 93.09 ± 1.38 99.94 ± 0.11 100 ± 0.00 93.34 ± 1.11 94.65 ± 1.22
DenseNet161
67.0 - - - - - -
(Zendel et al., 2019)
ResNet-50
- 93.0 86.0 - - 87.0 94.0
(Jahan et al., 2021)
the overall accuracy scores for every configuration
considered on every architecture, besides the config-
uration using all α values at the same time. Figure 4
presents results solely on the MobileNet-V2 architec-
ture trained and validated on all α values considered
(1, 1.2, 1.35). Each color corresponds to each con-
figuration: red for Normal, yellow for Mask and blue
for CMB. Normal stands for grayscale images of the
switches, Mask means black and white images, while
CMB represents the combined version discussed pre-
viously in Subsection 3.5. The three bars ending
with PT represent the pre-trained version of the archi-
tecture which, as expected, leads to higher accuracy
scores.
4.2 Analysis
For the SNet architecture, it may be observed that
there is an increase in the accuracy scores when aug-
mentations are used on the ground-truth masks. Aug-
mentations were expected to boost the scores, how-
ever there was nothing to hint towards the effective-
ness of masks in solving this task.
Another observation is that as α is increased, the
values of the metrics increase as well. This was ex-
pected since a higher α value implies that bounding
boxes contain more information. This leads one to
believe that the context, i.e. details around the switch,
is indeed important when classifying switches.
Another conclusion that was expected when train-
ing is that using various values for α at the same time
leads to better results. This can be attributed to the
fact that using a larger set of images for training al-
lows the architectures to better model the features that
distinguish switches from other objects and from dif-
ferent classes of switches.
Compared to Zendel et al., our results show
greater accuracy values. On the binary task of distin-
guishing between Switch-Left and Switch-Right, they
obtained an average accuracy of 67% after 20 epochs.
We have trained for 100 epochs on three classes by in-
troducing the None class and have obtained accuracy
scores of up to 96%.
Most of the training attempts showed an overfit-
ting behavior which was slightly diminished by the
usage of augmentations, yet still present. For all ar-
chitectures, depending on the value of α used, an in-
crease in performance is registered when augmenta-
tions and ground-truth masks are used. The SNet ar-
chitecture becomes dramatically better with the usage
of these enhancements.
Comparing the architectures between each other,
we observe that the best results are registered by the
MobileNet-V2 model, classifying correctly almost all
None-labelled images and classifying the two classes
of interest with an accuracy of 95%.
Given the results from Table 1, we observe that
if we train on a configuration using a single value
for α, the VGG-11 architecture leads to the best re-
sults. This is numerically true, however, for almost all
configurations, as shown in Figure 3, the MobileNet-
V2 architecture led to the highest accuracy scores.
Besides leading to the best results, MobileNet-V2
also has the fewest learnable parameters compared to
VGG-11 or ResNet-18. SNet is not considered for
this comparison since it is a single convolutional layer
architecture used mainly to test the pipeline.
Comparing our results to the state-of-the-art re-
sults reported by Jahan et al., we have obtained lower
precision and recall values when using models trained
from scratch. Despite this, when we perform transfer
learning on pre-trained models, our scores increase,
as it can be seen in Figure 4.
Their precision and recall values are unbalanced,
having a higher precision for left switches and a
higher recall for right switches. Our precision and
recall metrics show more stable results. This being
said, a comparison between the two approaches is im-
possible to be made as the models were trained on
different datasets. They do not consider the combined
input representation we experiment with.
The architectures we have considered for the
switch classification task require considerably less
parameters than the competition. While Zendel et
al. use a DenseNet-161 (Huang et al., 2017) with
20M learnable parameters and Jahan et al. use Reti-
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
774

Figure 3: Comparison between architectures for each configuration. Grouping made on different α values configurations.
Figure 4: Additional comparisons only for the MobileNet-
V2 architecture on all α values.
naNet (Lin et al., 2017) which consists of a ResNet50
(He et al., 2016) backbone with more than 23M pa-
rameters, ResNet-18 has only 11M parameters and
MobileNet-V2 has even less parameters with 3.4M.
From a numerical performance point of view, be-
sides SNet, all architectures lead to competitive and
reliable results on the considered metrics. Given a dy-
namic environment, the most reliable model should be
the one with the best metrics performance and small-
est inference time. The MobileNet-V2 architecture
falls into this category, having the fewest number of
parameters with 3.4M, 3 times less than ResNet-18
and 10 times less than VGG-11.
With our experiments we obtained competitive re-
sults compared to the state-of-the-art for switch clas-
sification using various architectures, each with its
perks and tweaks. We manage to obtain high preci-
sion and recall scores especially after using the pre-
trained MobileNet-V2 architecture. Note that in our
experiments we use the additional None class, thus
the comparisons are not perfect.
To provide concrete answers to the research ques-
tions from Section 1:
1. The samples used for validating our experiments
contain images of switches taken from a camera
positioned on top a moving train at various speeds.
Some of the images suffer from motion blur which
mimics real use-cases. We have not tested the
classifier in a real-life scenario though, i.e. plac-
ing ourselves a camera on top of a train and ex-
tracting crops of switches from its feed. The reli-
ability can be quantified by the values of the met-
rics discussed in this section in comparison to re-
sults obtained by other authors.
2. As a result of our experiments, in order to sur-
pass the state-of-the-art results for the switch
classification task, a pre-trained version of the
MobileNet-V2 architecture can be used and
trained on images of various sizes (various α val-
ues) from the RailSem19 dataset.
5 FUTURE CONSIDERATIONS
For future research, there are some considerations that
can be made regarding a more enhanced dataset.
The current bounding box selection process for
the switch classes Switch-Left and Switch-Right does
not follow a precise rule regarding their extraction.
Some switch crops could be observed in different po-
sitions, sometimes containing the whole mobile rail,
while other times cutting it short. This lack of consis-
tency represents one area of improvement.
Another area worth investigating is the the strat-
egy based on combining multiple modalities. Al-
Railway Switch Classification Using Deep Neural Networks
775

though promising, this representation does not con-
siderably boost the performance of the models. More
investigations can be made in this area of multi-modal
methods. We also intend to focus on classifying
switches observed from larger distances.
6 CONCLUSIONS
In this paper we proposed an efficient approach for
switch classification using different neural networks
architectures on images taken from the perspective
of the train. The considered architectures, namely
ResNet-18, VGG-11 and MobileNet-V2, led to some
competitive results when compared to two of the few
existing approaches found to solve this task on the
considered dataset. Despite the high values of the
metrics obtained, the task of switch classification still
remains a difficult one. This paper represents a con-
siderable step forward towards solving this task.
ACKNOWLEDGEMENTS
This work was supported by two grants from Babes¸-
Bolyai University, projects numbers 6851/2021 and
18/2022.
REFERENCES
Agarap, A. F. (2018). Deep learning using rectified linear
units (relu). arXiv preprint arXiv:1803.08375.
Alexandrescu, A.-R. and Manole, A. (2022). A dynamic
approach for railway semantic segmentation. Studia
Universitatis Babes-Bolyai, Informatica, 67(1):61–
76.
Canny, J. (1986). A computational approach to edge de-
tection. IEEE Transactions on pattern analysis and
machine intelligence, 8(6):679–698.
Cordts, M., Omran, M., Ramos, S., Rehfeld, T., Enzweiler,
M., Benenson, R., Franke, U., Roth, S., and Schiele,
B. (2016). The cityscapes dataset for semantic urban
scene understanding. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 3213–3223.
Duda, R. O. and Hart, P. E. (1972). Use of the hough trans-
formation to detect lines and curves in pictures. Com-
munications of the ACM, 15(1):11–15.
Growitsch, C. and Wetzel, H. (2009). Testing for economies
of scope in european railways: an efficiency analysis.
Journal of Transport Economics and Policy (JTEP),
43(1):1–24.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 770–778.
Howard, A. G., Zhu, M., Chen, B., Kalenichenko, D.,
Wang, W., Weyand, T., Andreetto, M., and Adam,
H. (2017). Mobilenets: Efficient convolutional neu-
ral networks for mobile vision applications. arXiv
preprint arXiv:1704.04861.
Huang, G., Liu, Z., Van Der Maaten, L., and Weinberger,
K. Q. (2017). Densely connected convolutional net-
works. In Proceedings of the IEEE conference on
computer vision and pattern recognition, pages 4700–
4708.
Jahan, K., Niemeijer, J., Kornfeld, N., and Roth, M. (2021).
Deep neural networks for railway switch detection
and classification using onboard camera images. In
2021 IEEE Symposium Series on Computational In-
telligence (SSCI), pages 01–07. IEEE.
Karak
¨
ose, M., Akın, E., and Yaman, O. (2016). Detection of
rail switch passages through image processing on rail-
way line and use of condition-monitoring approach.
International Conference on Advanced Technology &
Sciences.
Kingma, D. P. and Ba, J. (2015). Adam: A method for
stochastic optimization. In Bengio, Y. and LeCun,
Y., editors, 3rd International Conference on Learning
Representations, Conference Track Proceedings.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012). Im-
agenet classification with deep convolutional neural
networks. Advances in neural information processing
systems, 25:1097–1105.
Lin, T.-Y., Goyal, P., Girshick, R., He, K., and Doll
´
ar, P.
(2017). Focal loss for dense object detection. In
Proceedings of the IEEE international conference on
computer vision, pages 2980–2988.
Lin, T.-Y., Maire, M., Belongie, S., Hays, J., Perona, P.,
Ramanan, D., Doll
´
ar, P., and Zitnick, C. L. (2014).
Microsoft coco: Common objects in context. In Euro-
pean conference on computer vision, pages 740–755.
Springer.
Pohlen, T., Hermans, A., Mathias, M., and Leibe, B. (2017).
Full-resolution residual networks for semantic seg-
mentation in street scenes. In Proceedings of the IEEE
Conference on Computer Vision and Pattern Recogni-
tion, pages 4151–4160.
Russakovsky, O., Deng, J., Su, H., Krause, J., Satheesh, S.,
Ma, S., Huang, Z., Karpathy, A., Khosla, A., Bern-
stein, M., et al. (2015). Imagenet large scale visual
recognition challenge. International journal of com-
puter vision, 115(3):211–252.
Sandler, M., Howard, A., Zhu, M., Zhmoginov, A., and
Chen, L.-C. (2018). Mobilenetv2: Inverted residu-
als and linear bottlenecks. In Proceedings of the IEEE
conference on computer vision and pattern recogni-
tion, pages 4510–4520.
Simonyan, K. and Zisserman, A. (2015). Very deep con-
volutional networks for large-scale image recognition.
In International Conference on Learning Representa-
tions.
Zendel, O., Murschitz, M., Zeilinger, M., Steininger, D.,
Abbasi, S., and Beleznai, C. (2019). Railsem19: A
dataset for semantic rail scene understanding. In Pro-
ceedings of the IEEE/CVF Conference on Computer
Vision and Pattern Recognition Workshops.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
776
