
Salient Mask-Guided Vision Transformer for Fine-Grained Classification
Dmitry Demidov, Muhammad Hamza Sharif, Aliakbar Abdurahimov, Hisham Cholakkal
and Fahad Shahbaz Khan
Mohamed bin Zayed University of Artificial Intelligence, Abu Dhabi, U.A.E.
Keywords:
Vision Transformer, Self-Attention Mechanism, Fine-Grained Image Classification, Neural Networks.
Abstract:
Fine-grained visual classification (FGVC) is a challenging computer vision problem, where the task is to au-
tomatically recognise objects from subordinate categories. One of its main difficulties is capturing the most
discriminative inter-class variances among visually similar classes. Recently, methods with Vision Trans-
former (ViT) have demonstrated noticeable achievements in FGVC, generally by employing the self-attention
mechanism with additional resource-consuming techniques to distinguish potentially discriminative regions
while disregarding the rest. However, such approaches may struggle to effectively focus on truly discrimina-
tive regions due to only relying on the inherent self-attention mechanism, resulting in the classification token
likely aggregating global information from less-important background patches. Moreover, due to the immense
lack of the datapoints, classifiers may fail to find the most helpful inter-class distinguishing features, since
other unrelated but distinctive background regions may be falsely recognised as being valuable. To this end,
we introduce a simple yet effective Salient Mask-Guided Vision Transformer (SM-ViT), where the discrim-
inability of the standard ViT’s attention maps is boosted through salient masking of potentially discriminative
foreground regions. Extensive experiments demonstrate that with the standard training procedure our SM-ViT
achieves state-of-the-art performance on popular FGVC benchmarks among existing ViT-based approaches
while requiring fewer resources and lower input image resolution.
1 INTRODUCTION
Fine-grained visual classification (FGVC) is a chal-
lenging computer vision task that aims to detect mul-
tiple sub-classes of a meta-category (e. g., car or air-
plane models (Krause et al., 2013; Maji et al., 2013),
animal or plant categories (Horn et al., 2018; Nils-
back and Zisserman, 2008), etc.). This type of image
classification, compared to the traditional one (Deng
et al., 2009; Zhou et al., 2014), involves larger inter-
class similarity and a lack of data per class (Ding
et al., 2019). This complex yet essential problem has
a wide range of research and industrial applications
including, but not limited to, autonomous driving, vi-
sual inspection, object search, and identification.
One of the important keys to solving the FGVC
problem is to detect more distinguishable regions in
an image (Wang et al., 2018; Luo et al., 2019), and
the computer vision community has produced vari-
ous solutions attempting to do so for the past years
(Khan et al., 2011; Khan et al., 2015; Zheng et al.,
2019a). The most recent achievements, based on deep
neural networks (He et al., 2016), mainly represent
localisation-based and attention-based methods (fol-
Figure 1: Visualised attention performance comparison of
vanilla ViT (first row) and our SM-ViT (second row). For
ViT we demonstrate the averaged attention map for the fi-
nal class token. While for SM-ViT we first show the ex-
tracted saliency mask from the salient object detection mod-
ule, and then the final class token’s averaged attention map
augmented according to this mask.
lowing (Wang et al., 2021b; He et al., 2022)). The
localisation-related approaches aim to learn discrimi-
native and interpretable features from specific regions
of input images. Such approaches initially utilised
properly annotated parts of an object in each im-
age (Berg and Belhumeur, 2013; Xie et al., 2013;
Demidov, D., Sharif, M., Abdurahimov, A., Cholakkal, H. and Khan, F.
Salient Mask-Guided Vision Transformer for Fine-Grained Classification.
DOI: 10.5220/0011611100003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 4: VISAPP, pages
27-38
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
27

Huang et al., 2016), however, impractically labori-
ous and costly densely annotated datasets along with
the slow inference of the final model initiated more
advanced techniques. Recent works on localisation-
based methods (Ding et al., 2019; Ge et al., 2019),
adopt a region proposal network able to predict re-
gions potentially containing the discriminative fea-
tures. This information is further passed to a back-
bone in order to extract features from these regions
(Chen et al., 2009). A drawback of such methods is
that they are tend to consider the predicted regions as
independent patches (He et al., 2022), what may re-
sult in inefficiently large bounding boxes simply con-
taining more foreground information than the other
potentially more discriminative but smaller proposals.
Another issue is that such extra modules often require
solving an individual optimisation problem.
Recently, attention-based methods (Xiao et al.,
2015; Zheng et al., 2021) leveraging vision trans-
former (ViT) architecture (Dosovitskiy et al., 2021)
have achieved noticeable results on image classifica-
tion problems. ViT considers an input image as a se-
quence of its patches, what allows the model to ag-
gregate important information from the whole image
at a time. A self-attention mechanism further attempts
to detect the most discriminative patches, which help
to automatically find the important regions in an im-
age. This way of processing makes the model able to
capture long-range dependencies beneficial for clas-
sification (Chen et al., 2021). Such an ability of
the attention-based methods to efficiently learn dis-
tinctive features can also be helpful for the FGVC
problem as well. Nevertheless, a recent study (He
et al., 2022) investigating the performance of vanilla
ViT on FGVC indicates that the class token, decid-
ing on the final class probabilities, may pay more at-
tention to global patches and concentrate less on lo-
cal ones, which can hamper the performance in fine-
grained classification. Recent ViT-based approaches
for FGVC (Wang et al., 2021b; He et al., 2022) typi-
cally attempt to solve this issue by introducing an ex-
tra module, which is responsible for better segrega-
tion of class token attention by implicit distinguish-
ing of potentially discriminative regions while disre-
garding the rest. However, these methods may strug-
gle to effectively focus on more discriminative re-
gions due to only relying on the self-attention mech-
anism, resulting in the classification token likely ag-
gregating global information from less valuable back-
ground regions. Moreover, despite the accuracy im-
provement, such methods mainly introduce signifi-
cantly more computations or trainable parameters.
Contributions. (1) In this work, we introduce a sim-
ple yet effective approach to improve the performance
of the standard Vision Transformer architecture at
FGVC. Our method, named Salient Mask-Guided Vi-
sion Transformer (SM-ViT), utilises a salient object
detection module comprising an off-the-shelf saliency
detector to produce a salient mask likely focusing
on the potentially discriminative foreground object
regions in an image. The saliency mask is then
utilised within our ViT-like Salient Mask-Guided En-
coder (SMGE) to boost the discriminability of the
standard self-attention mechanism, thereby focusing
on more distinguishable tokens. (2) We argue that, in
the case of fine-grained classification, the most impor-
tant features are in the foreground and come from the
main (salient) object in an image. However, unlike
some of the previous SOTA ViT-based works, we do
not completely disregard the less recognisable image
parts but rather guide the attention scores towards the
more beneficial salient patches. (3) Moreover, we ad-
dress the well-known problem of the immense lack of
the datapoints in FGVC datasets, when classifiers of-
ten fail to find truly helpful inter-class distinguishing
features, since unrelated but distinctive background
regions may be falsely recognised as being valu-
able within the little available information provided
by a training data set. Therefore, by encouraging
the self-attention mechanism to pay its ”attention”
to the salient regions, we simply enforce it to con-
centrate its performance within the main object and,
therefore, to find the truly distinguishing cross-class
patches. (4) To the best of our knowledge, we are
the first to explore the effective utilisation of saliency
masks in order to extract more distinguishable infor-
mation within the ViT encoder layers by boosting
the discriminability of self-attention features for the
FGVC task. (5) We experimentally demonstrate that
the proposed SM-ViT effectively reduces the influ-
ence of unnecessary background information while
also focusing on more discriminative object regions
(see Fig. 1). Our comprehensive analysis of exten-
sive experiments on three popular fine-grained recog-
nition datasets (Stanford Dogs, CUB, and NABirds)
demonstrates that with the standard training proce-
dure the proposed SM-ViT achieves state-of-the-art
performance on FGVC benchmarks, compared to ex-
isting ViT-based approaches published in literature.
(6) Another important advantage of our solution is
its integrability, since it can be fine-tuned on top of
a ViT-based backbone or can be integrated into a
Transformer-like architecture that leverages the stan-
dard self-attention mechanism. The code and models
are shared at: https://github.com/demidovd98/sm-vit.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
28

2 RELATED WORK
2.1 Fine-Grained Visual Classification
Besides the plain feature-encoding CNN-based so-
lutions (Yu et al., 2018; Zheng et al., 2019b; Gao
et al., 2020) simply extracting high-order image fea-
tures for recognition, current specific solutions for the
FGVC problem are mainly related to two following
groups based on a method used: localisation-based
and attention-based approaches. The former aim to
explicitly detect discriminative regions and perform
classification on top of them, and the latter aim to pre-
dict the relationships among image regions and clas-
sify the object by this information.
Early localisation-based methods (Berg and Bel-
humeur, 2013; Huang et al., 2016), initially proposed
for densely annotated datasets with bounding boxes
for important regions, first locate the foreground ob-
ject and its parts and then classify the image based
on this information. Despite the relatively better per-
formance, such solutions highly rely on the manual
dense annotations including one or multiple bound-
ing boxes per image, what makes them practically
inapplicable to the real world scenarios. As a solu-
tion for this problem, in (Ge et al., 2019) the authors
leverage weakly-supervised object detection and in-
stance segmentation techniques to first predict multi-
ple coarse regions and further choose the most distin-
guishable ones. In later works, (He and Peng, 2017)
suggested using additional spatial constraints to im-
prove the quality of the chosen parts, (Wang et al.,
2020) presented an approach to utilise potential cor-
relations among parts in order to select the best ones,
and (Yang et al., 2021) presented a method able to
first create a database of region features and then cor-
rect the class prediction by re-ranking the detected
global and local information. Despite the better per-
formance, such approaches usually require a sepa-
rate, properly constructed, detection branch, which
complicates the overall architecture and noticeably in-
creases training and inference time. In addition, com-
plete cropping of less important regions does not al-
ways increase the model’s accuracy.
As an alternative, attention-based methods are
able to perform both classification and localisation
steps simultaneously and with no additional data, by
predicting the discriminative parts inside the self-
attention mechanism. For example, in (Zhao et al.,
2017) authors propose leveraging visual attention to
extract different attention maps and find the impor-
tant information in them. A multi-level attention tech-
nique is presented in (Xiao et al., 2015), where the
final model is capable of filtering out the common
among classes regions. Later works (Yu et al., 2018)
and (Zheng et al., 2021) demonstrate modified archi-
tectures with the integration of a cross-layer bilinear
pooling mechanism and a progressive attention tech-
nique, respectively, where both aim to progressively
improve the region prediction performance. Several
other recent solutions for FGVC are (Yu et al., 2021;
Zhao et al., 2022), which demonstrate different im-
provements for distinctive regions localisation, and
(Behera et al., 2021; Zhu et al., 2022; Do et al., 2022;
Diao et al., 2022; Sun et al., 2022), which propose
complex techniques for mainly marginal performance
increasing. Although these methods actually show
some improvement, they mostly come with a few no-
ticeable drawbacks: a significant computational cost
or a more complex architecture, resulting in a lack of
interpretability and dataset-specific solutions.
2.2 Vision Transformer
Initially discovered to process sequences of text in
natural language processing (NLP) (Vaswani et al.,
2017), the Transformer architecture with its self-
attention mechanism has shown a great success in
that field (Devlin et al., 2019; Dai et al., 2019; Tsai
et al., 2019) and was later extended by researchers
to computer vision (CV) tasks. After the proposal
of the Vision Transformer architecture (Dosovitskiy
et al., 2021), which demonstrated the SOTA perfor-
mance on multiple problems, the community has been
gradually exploring ViT’s abilities by using it as a
backbone for popular CV problems, such as image
classification (Lee et al., 2021), object detection (Car-
ion et al., 2020; Zhu et al., 2021), segmentation (Xie
et al., 2021a; Wang et al., 2021a; Zheng et al., 2021)
and others (Girdhar et al., 2019; Sun et al., 2020; He
et al., 2021). Simple integration of the ViT architec-
ture into other backbones and techniques has gained
promising achievements and still remains SOTA for
various problems. However, only a few studies in-
vestigate the properties of Vision Transformer on the
FGVC problem, where the vanilla ViT model shows
worse performance than its CNN counterparts.
One of the pioneers leveraging ViT on FGVC
tasks is TransFG framework (He et al., 2022), which
is the first to propose a solution to automatically se-
lect the distinguishable image patches and later use
them for the final classification step. However, in or-
der to achieve better results, this method uses over-
lapping patches, what requires significantly more re-
sources, compared to vanilla ViT. Further proposed
FFVT (Wang et al., 2021b) uses its special MAWS
module for feature fusion, what makes it able to ag-
gregate more local information from the ViT encoder
Salient Mask-Guided Vision Transformer for Fine-Grained Classification
29

layers, what, as the authors stated, improves the orig-
inal ViT feature representation capability. However,
its overall idea includes selecting the patches with
the most attention scores and then disregarding the
other ones. This concept, based on the imperfect self-
attention mechanism, may increase the negative for
FGVC effect of background patches.
2.3 Mask-Guided Attention
Similar to our work, recently proposed mask-guided
attention techniques, mostly based on primitive
saliency models, have also demonstrated promising
results in detection and re-identification tasks (Xie
et al., 2021b). However, only few studies have at-
tempted to explore its ability to be helpful for fine-
grained visual classification. For example, in (Song
et al., 2018) the authors suggest adding mask infor-
mation as an additional input channel for a CNN in
order to separately learn features from the original
image and both foreground and background masked
copies of it. Another work, (Wang et al., 2021c), in-
vestigates the capacity of such models when trained
on more difficult patchy datasets, where the authors
offer to use the predicted mask to guide feature learn-
ing in the middle-level backbone layers. In addition to
that, some other early writings also discuss the ways
of leveraging the saliency information to guide the
learning process by simply using the mask as an extra
input (Mechrez et al., 2018; Hagiwara et al., 2011).
Another close to our idea recent approach is (Jiang
et al., 2022), where the authors suggested using con-
volution kernels with different sizes for input patches.
These feature activations are embedded into a ViT-
like encoder in order to increase its locality and trans-
lation equivariance qualities for binary medical im-
age segmentation problems. However, the authors do
not directly use the actual saliency information, and
rather assume that different activation maps are com-
ing from different types of the same single positive
class. Recently, several works (Gatys et al., 2017;
Mejjati et al., 2020) suggested integration of saliency
prediction as an additional component in a loss func-
tion in order to improve the training procedure. This
is achieved by feeding both the image and the pre-
dicted target saliency map, so that the model is trained
to produce outputs similar to the map. Another idea
of leveraging saliency information in attention-based
models is described in (Yu et al., 2022). The au-
thors suggested using attention maps from each en-
coder layer to generate a saliency binary mask, which
is then used for model pruning. All these methods
indeed demonstrate that the fusion of saliency infor-
mation with the main architecture’s data flow can be
beneficial and efficient, however they do not directly
utilise the saliency and rather use it as collateral data,
what results in a less noticeable improvement.
3 METHOD
3.1 Vision Transformer Framework
Following the original Transformer (Vaswani et al.,
2017) made for NLP tasks, the standard Vision Trans-
former architecture (Dosovitskiy et al., 2021) also ex-
pects an input to be a 1D sequence of tokens. There-
fore, in order to adapt it to computer vision prob-
lems, 2D input images need to be first cropped into
smaller 2D patches and then flattened into 1D vec-
tors, so that the input dimension changes are fol-
lowing: (H,W,C) → (N
p
,P,P,C) → (N
p
,(P
2
∗C)),
where H,W,C are initial image sizes, P is a prede-
fined patch size, and N
p
= H ∗W /P
2
is the number
of such patches. Next, using a trainable linear pro-
jection, transformed patches are mapped into a latent
embedding space of dimension D, which is the vector
size of all tokens throughout all ViT layers. Learn-
able 1D position embeddings are further added to the
patches in order to preserve the information about
spatial relations among them. Therefore, the result-
ing token embedding procedure is as follows:
z
0
= [x
cls
;x
1
p
E;x
2
p
E;...;x
N
p
p
E] + E
pos
, (1)
where E ∈R
(P
2
∗C)×D
is the trainable linear projection
and E
pos
∈ R
(N+1)×D
is the position embedding.
As the last input preparation step, an extra learn-
able class token is pre-pended to the sequence, so that
it can interact with the image patches, similar to (De-
vlin et al., 2019). This token, fed to the encoder with
the sequence of embedded patches, is supposed to ag-
gregate the information from the image tokens in or-
der to summarise the image representation and convey
it to a classification head.
In more detail, the vanilla ViT encoder compo-
nent, same as in (Vaswani et al., 2017), consists of
several repeating encoding layers utilising the multi-
head self-attention (MSA) mechanism, MLP blocks,
and both layer normalisation (LN) and residual con-
nection techniques (Baevski and Auli, 2019; Wang
et al., 2021a). More specifically, MSA used in vanilla
ViT is an extension of the ordinary self-attention
mechanism, represented by this equation:
Attention(Q,K,V ) = so f tmax(
QK
T
√
d
k
)V (2)
where d
k
is a scaling factor equal to the dimension
number of Q, K,V , which are queries, keys, and val-
ues respectively, derived from the input patches.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
30
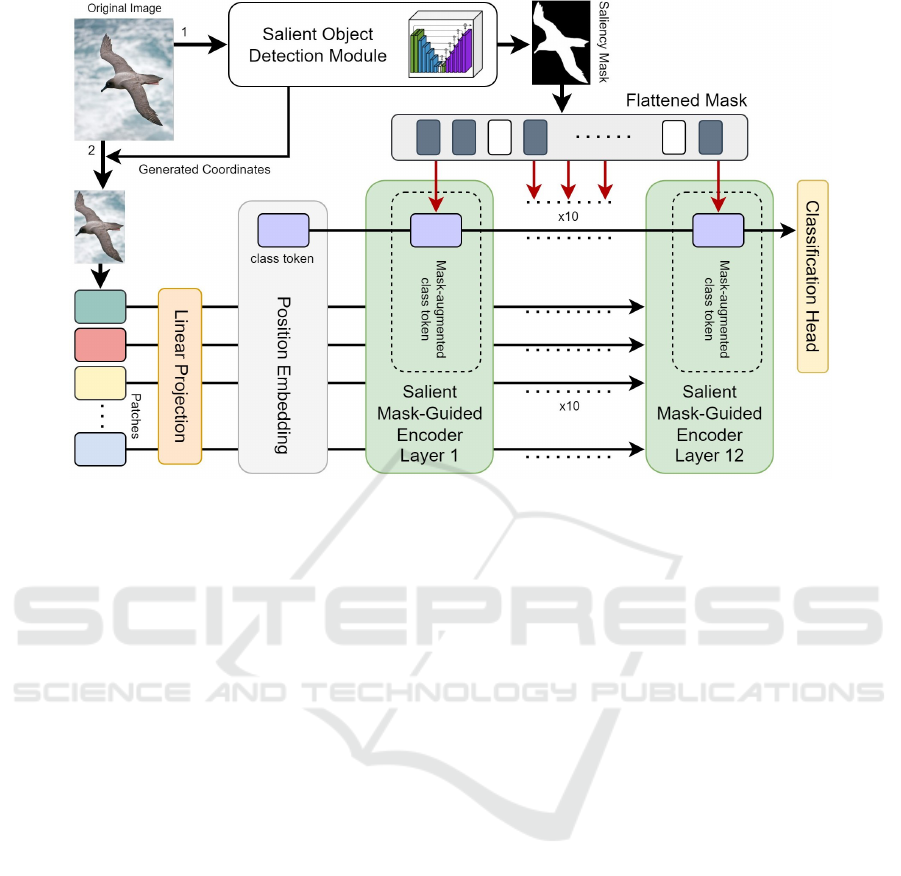
Figure 2: The overall architecture of our proposed SM-ViT. An image is first fed into the salient object detection module to
extract its saliency mask and automatically generate a bounding box, which are then used to prepare a binary mask and to
crop the image respectively. Further, the cropped image is fed into the ViT-like architecture, where it is first split into patches,
projected into the embedding space, the positional embedding is added to the patches, and a class token is prepended. Next,
the resulted sequence of tokens is passed through each layer of our Salient Mask-Guided Encoder (SMGE), where inside the
multi-head self-attention mechanism the flatten binary mask is used to augment attention scores of the class token accordingly.
Lastly, the class token values from the last SMGE layer are passed to a classification head to perform categorisation.
Eventually, the classification head, implemented
as a multi-layer perceptron (MLP) with a hidden
layer, is attached to the class token z
0
L
in the last en-
coder layer L and is responsible for the final category
prediction, based on the aggregated information.
3.2 Salient Mask-Guided ViT
Overall Architecture. The ViT architecture, ini-
tially designed for less fine-grained problems, is sup-
posed to capture both global and local information,
what makes it spend a noticeable part of its attention
performance on the background patches (Dosovitskiy
et al., 2021). This property makes vanilla ViT per-
form worse on FGVC tasks, since they usually require
finding the most distinguishable patches, which are
mostly the foreground ones. In order to resolve this
issue, we propose Salient Mask-Guided Vision Trans-
former (SM-ViT), which is able to embed information
coming from a saliency detector into the self-attention
mechanism. The overall architecture of our SM-ViT
is illustrated in Fig. 2.
Salient Object Detection Module. At the initial step,
we utilise a salient object detection (SOD) module for
saliency extraction. Our proposed method employs
a popular deep saliency model, U2-Net (Qin et al.,
2020), pre-trained on a mid-scale dataset for salient
object detection (Wang et al., 2017). We chose this
particular solution since its nested U-shaped architec-
ture predicts saliency based on rich multi-scale fea-
tures at relatively low computation and memory costs.
First, an input image is passed through the SOD mod-
ule set up in a test mode, which further generates the
final non-binary saliency probability map. In the next
phase, the model output is normalised to be within the
values [0...1] and then converted into a binary mask
by applying a threshold d
α
on each mask’s pixel a
i
according to the following equation:
a
i
=
(
1, if a
i
≥ d
α
0, otherwise,
(3)
where d
α
is a pixel’s intensity threshold. According to
the authors’ recommendations (Qin et al., 2020), we
set it to 0.8 for all our experiments. Finally, the re-
sulting binary mask and a bounding box for the found
salient object(s) (in the form of the minimum and
maximum 2D coordinates of the positively thresh-
olded pixels) are extracted and saved.
An important note is that our solution also takes
into account the cases when a mask is not found or is
corrupted, and, if so, the initial probability map is first
refined again with Eq. (3) using a threshold d
α
= 0.2,
Salient Mask-Guided Vision Transformer for Fine-Grained Classification
31
which allows more pixels to be considered positive. If
the mask is not restored even after refining, its values
are automatically set as positive for the central 80 %
of the image pixels.
The extracted binary mask and bounding box are
further passed into our SMGE.
Salient Mask-Guided Encoder. The core module of
SM-ViT is our novel Salient Mask-Guided Encoder
(SMGE), which is a ViT-like encoder modified to be
able to receive and process saliency information. Its
main purpose is to increase the class token attention
scores for the image tokens containing foreground re-
gions. Initially, an image, cropped according to the
extracted in SOD module bounding box, in a form
of patches is projected into linear embeddings, and a
position embedding is added to it. Next, instead of
the standard ViT’s encoder, our SMGE takes its place
functioning as an improved self-attention mechanism.
In order to understand the intuition behind our idea,
we need to point out that the way of attention obtain-
ing in the vanilla ViT encoder (refer to Eq 2) makes
the background and foreground patches equally im-
portant and does not discriminate valuable for FGVC
problems salient regions of the main object(s) in an
image. Taking this issue into account, our solution
is to increase attention scores for the patches that in-
clude a part of the main (salient) object in them. How-
ever, due to the nature of the self-attention mechanism
and the non-linearity used in it, one can not simply
increase the final attention values themselves, since
it will break the major assumptions of the algorithm
(Dosovitskiy et al., 2021). Therefore, in order to solve
this problem, we apply changes to attention scores
calculated right before the softargmax function (also
known as softmax), according to the saliency mask
provided by the salient object detection module. For
this purpose, the binary mask is first flattened into
a 1D vector and a value for the class token is pre-
pended to it, so that, similar to Eq 1, the size of the re-
sulting mask matches the number of tokens (N
p
+ 1):
m = [m
cls
;m
1
p
;m
2
p
;...;m
N
p
p
], (4)
where m
cls
is always positive since the attention of the
class token to itself is considered favourable (Doso-
vitskiy et al., 2021). Further, a conventional attention
scores matrix X
scor
is calculated in each head:
X
scor
=
QK
T
√
d
k
V (5)
Next, the maximum value x
max
among the attention
scores of the class token to each patch is found for
each head. These values are further used to modify
the attention scores of the class token by increasing
the unmasked by m ones with a portion of the largest
found value x
max
, what is calculated for every head:
x
scor
cls
=
(
x
i
scor
cls
+ (x
max
∗d
θ
) if m
i
= 1
x
i
scor
cls
otherwise,
(6)
where x
scor
cls
is a row in the matrix of attention scores
X
scor
belonging to the class token, d
θ
is a coefficient
controlling the portion of the maximum value to be
added, and i ∈ [1,2,...N
p
,N
p
+ 1]. We provide an ab-
lation study on the choice of coefficient d
θ
in Sec-
tion 4.3. Finally, following Eq 2, the rows of the
resulted attention scores matrix X
0
scor
, including the
modified values in its x
scor
cls
row, are converted into
probability distributions using a non-linear function:
Y = so f tmax(X
scor
) (7)
Eventually, similar to the multi-layer vanilla ViT en-
coder, the presented algorithm is further repeated
at each SMGE’s layer until the classification head,
where the standard final categorisation is done based
on the class token aggregating the information from
the ”highlighted” regions throughout SMGE. To sum-
marise, our simple yet efficient salient mask-guided
encoder changes the vanilla ViT encoder by mod-
ifying its standard attention mechanism’s algorithm
(in Eq 2) with Eq 4-7. Therefore, relatively to the
vanilla ViT encoder, our SMGE only adds pure math-
ematical steps, does not require extra training param-
eters, and is not resource costly.
4 EXPERIMENTS AND RESULTS
In this section, we describe in detail the setup used for
our experiments, compare the obtained results with
current state-of-the-art achievements, and provide an
ablation study containing quantitative and qualitative
analysis. We demonstrate and explore the ability of
our SM-ViT to utilise saliency information in order to
improve its performance on FGVC problems.
4.1 Experiments Setup
Table 1: The details of three fine-grained visual classifica-
tion datasets used for the experiments.
Dataset Categories Classes Images
Stanford Dogs Dogs 120 20,580
CUB-200-2011 Birds 200 11,788
NABirds Birds 555 48,562
Datasets. We explore the properties of our SM-ViT
on three different popular benchmarks for FGVC:
Stanford Dogs (Khosla et al., 2011), CUB-200-2011
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
32
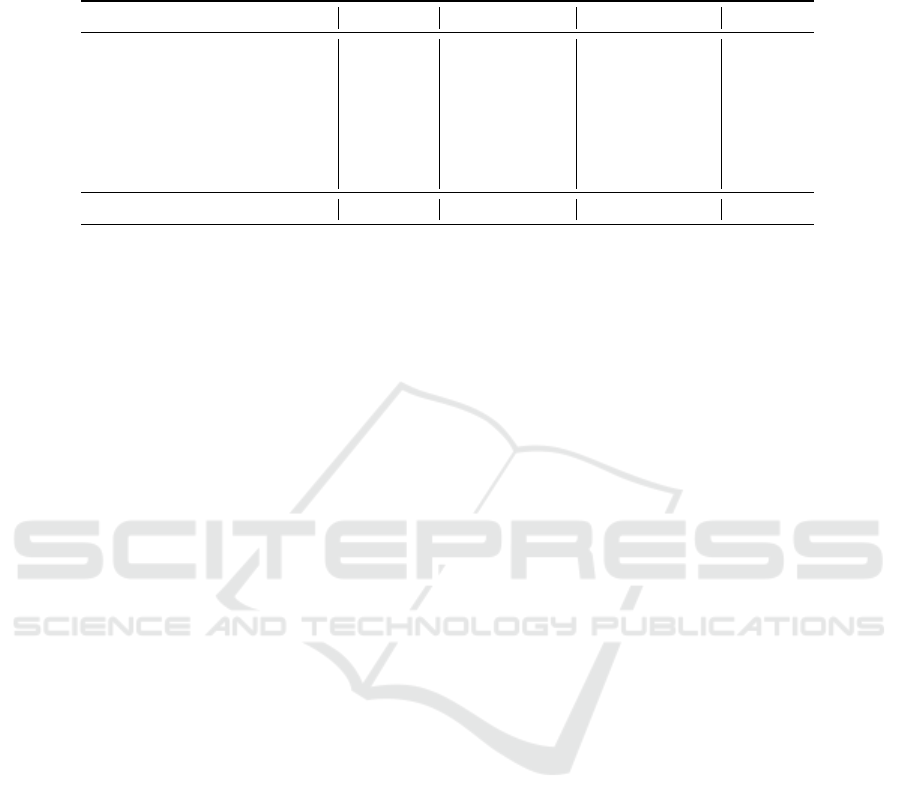
Table 2: Accuracy comparison on three FGVC datasets for our SM-ViT and other SOTA ViT-based methods. The considered
methods use the ViT-B/16 model pre-trained on the ImageNet-21K dataset. All of them are then fine-tuned with the standard
ViT training procedure with no overlapping patches. The best accuracies are highlighted in bold.
Method Backbone Stanford Dogs CUB-200-2011 NABirds
ViT (Dosovitskiy et al., 2021) ViT-B/16 91.4 90.6 89.6
TPSKG (Liu et al., 2022) ViT-B/16 91.8 91.0 89.9
DCAL (Zhu et al., 2022) ViT-B/16 - 91.4 -
TransFG (He et al., 2022) ViT-B/16 91.9 91.5 90.3
SIM-Trans (Sun et al., 2022) ViT-B/16 - 91.5 -
AFTrans (Zhang et al., 2022) ViT-B/16 91.6 91.5 -
FFVT (Wang et al., 2021b) ViT-B/16 91.5 91.6 90.1
SM-ViT (Ours) ViT-B/16 92.3 91.6 90.5
(Welinder et al., 2010), and NABirds (Van Horn et al.,
2015) (for more details, see Table 1). From the cho-
sen datasets, Stanford Dogs and CUB-200-2011 are
considered medium-sized FGVC benchmarks, and
NABirds is a large-sized one. We also emphasise
that, despite its size, the Stanford Dogs dataset in-
cludes images with multiple objects, artificial objects,
and people. It makes the task harder for the saliency
extraction module due to the pre-training objective’s
shift towards humans.
Baselines and Implementation Details. For all our
experiments, the backbone for the classification part
is Vision Transformer, more specifically, a ViT-B/16
model pre-trained on the ImageNet-21K (Deng et al.,
2009) dataset with 224x224 images and with no over-
lapping patches. For the saliency detection module,
a U2-Net model pre-trained on the DUTS-TR (Wang
et al., 2017) dataset, is used with constant weights.
Following common data augmentation tech-
niques, unless stated otherwise, the image process-
ing procedure is as follows. For the saliency mod-
ule, as recommended by the authors (Qin et al., 2020),
the input images are resized to 320x320 and no other
augmentations are applied. For our SM-ViT, the im-
ages are resized to 400x400 for the Stanford Dogs and
CUB-200-2011 datasets and to 448x448 for NABirds
(due to its higher-resolution images), without crop-
ping for all datasets. Next, only for the training pro-
cess, random horisontal flipping and colour jittering
techniques are applied. The threshold d
θ
in Eq. (6) is
set to 0.25 for CUB and NABirds and to 0.3 for Stan-
ford Dogs (see Section 4.3 for ablation details). All
our models are trained with the standard SGD opti-
miser with a momentum set to 0.9 and with a learn-
ing rate of 0.03 for CUB and NABirds, and 0.003
for Stanford Dogs, all with cosine annealing for the
optimiser scheduler. The batch size is set to 32 for
all datasets. Pre-trained with 224x224 images ViT-
B/16 weights are load from the official ViT (Dosovit-
skiy et al., 2021) resources. For a fair comparison,
we also reimplement some of the methods with the
above-mentioned preset while also following their de-
fault settings.
All our experiments are conducted on a single
NVIDIA RTX 6000 GPU using the PyTorch deep
learning framework and the APEX utility.
4.2 Comparison with State-of-the-Art
In this subsection, we compare the performance of
our SM-ViT with other ViT-based SOTA methods on
three FGVC datasets. Before discussing the results,
we need to emphasise that our initial goal is to provide
an improved Vision Transformer architecture which is
able to perform on FGVC problems better than the
original ViT and also can easily replace it in other
works where it is used as a backbone. We are de-
signing an approach to improve the baseline with-
out additional training parameters and significant ar-
chitecture changes, rather than simply providing the
best-performing but hardly applicable solution ”by
all means”. Keeping this in mind, in Table 2 we
compare our SM-ViT with other officially published
SOTA ViT-based approaches, which only use the ViT-
B/16 backbone with no significant changes and do not
require a lot of extra computations or training param-
eters compared to vanilla ViT. There also exist other
methods which mainly use significantly more com-
plex solutions, either requiring noticeably more train-
ing time and resources, or using more sophisticated
and less popular backbones.
The results on Stanford Dogs demonstrate that be-
sides a significant improvement of 0.9 % over vanilla
ViT, our method is also superior among other ap-
proaches utilising the unchanged ViT-B/16 backbone
showing a margin of 0.4 % to the second best coun-
terpart.
It is important to mention that images in this
dataset often include multiple extraneous objects (e.g.
other animals, multiple categories, artificial objects)
besides the main category, which may negatively af-
fect the performance of the salient object detection
Salient Mask-Guided Vision Transformer for Fine-Grained Classification
33

Figure 3: Visualisation of vanilla ViT and our SM-ViT results on different datasets. The first row shows original images,
while the second and third rows demonstrate averaged by all heads attention maps generated by the class token at the final
encoder layer of vanilla ViT and SM-ViT, respectively. Brightness intensity represents the total amount of attention, where
the more attention the class token pays to a region, the brighter it is, and the other way around.
module. Nevertheless, our SM-ViT still manages to
demonstrate the best result. On CUB our solution
outperforms vanilla ViT by noticeable 1.0 % and also
shares the Top-1 performance with another ViT-based
solution, FFVT, which shows noticeably lower per-
formance on the other datasets.
For NABirds, our method improves vanilla ViT
performance by up to 90.5 %, showing a margin of 0.9
% over the predecessor and of 0.2 % over the closest
counterpart.
We also emphasise that, our approach provides al-
most equally large performance increase on each con-
sidered dataset, what certainly demonstrates its abil-
ity to adapt to a problem and generalise better. We
point out that, unlike some of the considered dataset-
specific methods, our goal was not the proposal of
an over-optimised on a singular dataset solution, but
rather a potentially widely-applicable automatic ap-
proach with fewer heuristic parameters to adjust.
4.3 Ablation Studies
4.3.1 Effect of D
θ
Coefficient
With the goal to investigate the influence of the
heuristic part of our solution, we provide an abla-
tion study on the effect of different values for hyper-
parameter d
θ
in Eq 6. The results of the experiments
can be found in Table 3. Therefore, following the ab-
lation results, the best d
θ
value for CUB and NABirds
is 0.25, and for Stanford Dogs is 0.3. One can also ob-
serve that performance is better with this coefficient
value within the 0.2 −0.3 range, so we can suggest
that for other FGVC datasets this range can be a good
starting point. We assume that this is the case due
to the nature of the self-attention mechanism. Mak-
ing the attention scores too large compared to other
patches makes it too discriminative compared to the
less distinguishable and background regions, since the
final difference among output values grows exponen-
tially. In addition, one know that the attention mech-
anism is not perfect and can not always identify the
most important regions, let alone the fact that the per-
formance of saliency detectors is also imperfect so
they may produce messy predictions. Moreover, in
some cases some information about background can
be especially helpful so it may be unnecessary to com-
pletely crop out the background patches.
Table 3: The effect of different values for hyper-parameter
d
θ
in Eq 6. Training procedure and the rest hyper-
parameters remain unchanged. The best performance is
highlighted in bold.
Value of d
θ
Stanford Dogs CUB NABirds
0.1 92.1 91.4 90.3
0.25 92.2 91.6 90.5
0.3 92.3 91.5 90.4
0.5 92.1 91.3 90.2
1.0 92.0 91.1 90.1
All these points make the choice of d
θ
a trade-off
between the performance of the utilised saliency ex-
tractor and attention-based backbone.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
34
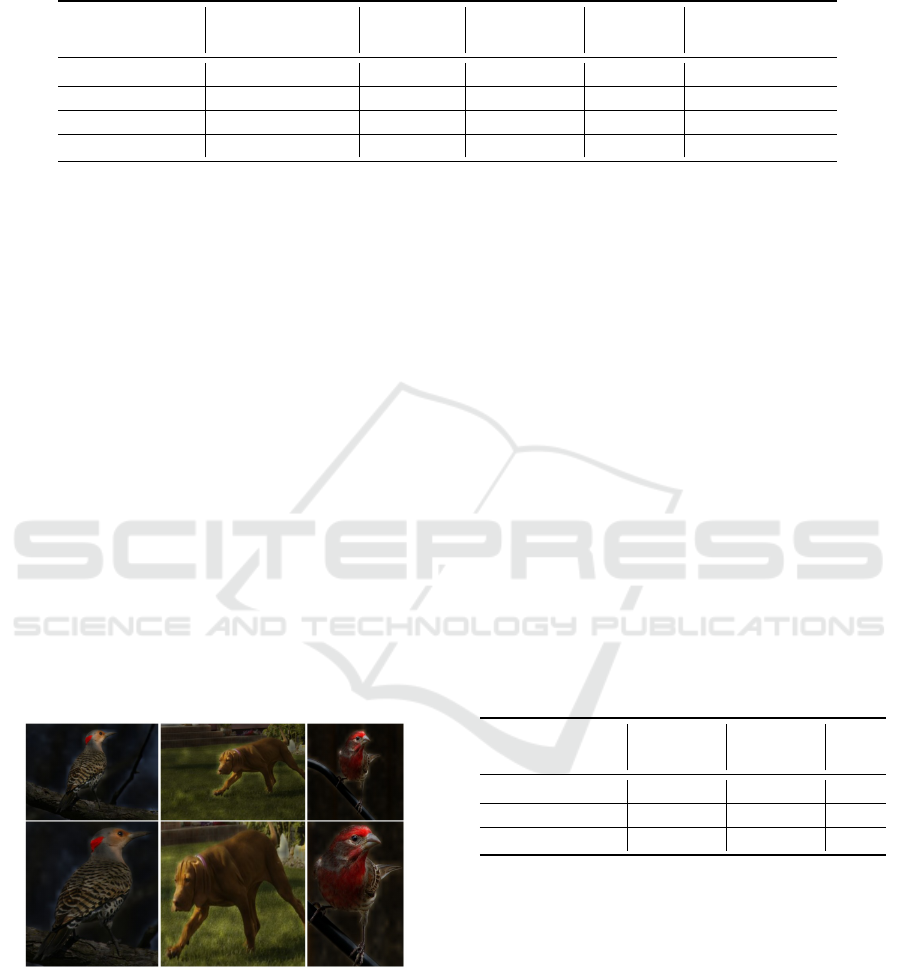
Table 4: The effect of our SMGE method, applied at different stages in our SM-ViT. The indicated performance is for
the CUB-200-2011 dataset with the standard ViT training and validation procedure. For inference experiments, the results
represent the average time per image in a batch size of 16.
Method Img. Resolution SMGE SMGE Accuracy Inference time,
in training in inference relative increase
ViT 448x448 × × 90.6 x1.0
ViT + SMGE 448x448 × X 90.8 x2.2
ViT + SMGE 400x400 X × 91.1 x0.6
SM-ViT (Ours) 400x400 X X 91.6 x1.4
4.3.2 Effect of SMGE
In Table 4 we provide the results of our SM-ViT
with our SMGE module at different stages to prove
that although mask cropping with the saliency mask
automatically generated by the SOD module indeed
improves performance, the main effect is achieved
mostly by our SM-ViT method altogether. We can
see that even with the SMGE module applied during
training only, its ability to effectively embed saliency
information into the self-attention mechanism allows
the model to still have better accuracy than the origi-
nal ViT has. For better understanding of this idea, the
visualised outputs of two different SMGE setups are
provided in Figure 4 for comparison. We can observe
that SM-ViT, trained with SMGE and then utilised
without SMGE during inference, still produces good-
quality attention maps even without the helpful crop-
ping and explicit attention scores augmentation tech-
niques. It can be seen that in both cases the attention
maps generated for the same images by SM-ViT are
more pronounced and cover more potentially discrim-
inative regions, compared to vanilla ViT.
Figure 4: Visual comparison of class token averaged atten-
tion maps at the last encoder layer of our SM-ViT, first fine-
tuned with SMGE, and then used with disabled (first row)
and enabled (second row) SMGE during inference.
It is also worth mentioning that our solution not
only outperforms (or is on par with) other SOTA ViT-
based methods but also does it with lower resolution
inputs. In addition, according to the ablation results in
Table 4, our SM-ViT is faster and still more accurate
than vanilla ViT when used with SMGE disabled for
inference. It becomes possible due to the fact that our
solution utilises saliency masks automatically gener-
ated by the SOD module. These binary masks are
used to crop the main salient object in an image before
it is processed by SMGE. This noticeably reduces the
original input images and, therefore, allows the model
to perform well enough with lower resolutions. More
specifically, our SM-ViT achieves SOTA results with
images of 400x400 resolution, compared to its coun-
terparts that require at least 448x448 inputs to achieve
a lower or comparable performance. In particular,
while achieving better than vanilla ViT results, our
SM-ViT requires 15 % fewer computations for train-
able parameters when using SMGE and 40% less in-
ference time when it is disabled for inference, which
are significant benefits for a resource-intensive ViT-
based module.
Table 5: The effect of different components of our SMGE
on the overall performance. The indicated accuracies are
for the CUB-200-2011 dataset.
Method Saliency Guided Acc.
Cropping Attention
ViT × × 90.6
ViT + SMGE X × 90.9
SM-ViT (Ours) X X 91.6
In order to understand the influence of our applied
techniques inside SMGE, we provide a performance
comparison with different setups in Table 5. Based
on the results, we emphasise that although mask crop-
ping actually helps to improve the accuracy, it is not
the main reason for the performance increase.
4.3.3 Qualitative Analysis
To better understand the significance of our SM-ViT,
we demonstrate its real outputs and compare them
with vanilla ViT ones using images from different
datasets. The comparison is shown in Fig 3, where the
first row contains input images, while the second and
Salient Mask-Guided Vision Transformer for Fine-Grained Classification
35

third rows demonstrate class token attention maps of
vanilla ViT and our SM-ViT, respectively. The atten-
tion maps are obtained by averaging the weights of all
heads at the last encoder layer, and brightness repre-
sents the amount of attention, where the brighter the
regions are, the more attention the class token pays
to it, and the other way around. From the results, it
is noticeable that SM-ViT provides more focused on
the salient object attention maps, which cover more
diverse and potentially discriminative parts of the
main objects (e. g., colourful feathering, beak, wings
shapes, and distinguishable colour patterns). Such
an ability also makes the category predictions more
robust to natural augmentations and also allows the
class token to detect more visually distinctive parts at
the same time. From our extensive qualitative analy-
sis of visualised attention maps obtained by random
images from the datasets, we noticed that SM-ViT
mostly predicts either better or similar to vanilla ViT
attention maps, and only rarely it highlights visually
less discriminative regions.
5 CONCLUSION
In this work, we propose a novel SM-ViT method able
to improve the performance of vanilla Vision Trans-
former on FGVC tasks by guiding the attention maps
towards potentially more important foreground ob-
jects and, therefore, reducing its ”spreading” to less
distinguishable regions. Our core, simple yet effi-
cient salient mask-guided encoder boosts attention
efficiency by simply utilising saliency information,
does not require additional training parameters, and
is relatively not resource costly. Experimental results
demonstrate that with a comparable amount of re-
sources, our SM-ViT is able to produce better than (or
similar to) SOTA results among other ViT-based ap-
proaches while remaining noticeably efficient. Based
on the promising results, we expect our solution to
improve performance on other FGVC datasets con-
taining classes naturally similar to the ones used for
saliency module pre-training. Moreover, we empha-
sise that our proposed SMGE can be further extended
to other popular ViT-like backbones with the conven-
tional self-attention mechanism (e.g., DeiT (Touvron
et al., 2021), Swin-T (Liu et al., 2021)). In addition,
other, more powerful salient object detectors produc-
ing standard saliency maps, can be used. Therefore,
we believe that SM-ViT has great potential to further
boost the performance of various FGVC setups and
could be a good starting point for future work.
REFERENCES
Baevski, A. and Auli, M. (2019). Adaptive input represen-
tations for neural language modeling. In International
Conference on Learning Representations.
Behera, A., Wharton, Z., Hewage, P., and Bera, A.
(2021). Context-aware attentional pooling (cap) for
fine-grained visual classification. arXiv pre-print
arXiv:2101.06635.
Berg, T. and Belhumeur, P. N. (2013). Poof: Part-based one-
vs.-one features for fine-grained categorization, face
verification, and attribute estimation. In 2013 IEEE
Conference on Computer Vision and Pattern Recogni-
tion, pages 955–962.
Carion, N., Massa, F., Synnaeve, G., Usunier, N., Kir-
illov, A., and Zagoruyko, S. (2020). End-to-end ob-
ject detection with transformers. In Computer Vision
– ECCV 2020: 16th European Conference, Glasgow,
UK, August 23–28, 2020, Proceedings, page 213–229.
Chen, J., Lu, Y., Yu, Q., Luo, X., Adeli, E., Wang, Y., Lu, L.,
Yuille, A. L., and Zhou, Y. (2021). Transunet: Trans-
formers make strong encoders for medical image seg-
mentation. arXiv pre-print arXiv:2102.04306.
Chen, W., Liu, T.-y., Lan, Y., Ma, Z.-m., and Li, H. (2009).
Ranking measures and loss functions in learning to
rank. In Bengio, Y., Schuurmans, D., Lafferty, J.,
Williams, C., and Culotta, A., editors, Advances in
Neural Information Processing Systems, volume 22.
Dai, Z., Yang, Z., Yang, Y., Carbonell, J., Le, Q., and
Salakhutdinov, R. (2019). Transformer-xl: Attentive
language models beyond a fixed-length context. In
57th Annual Meeting of the Association for Computa-
tional Linguistics, pages 2978–2988.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-
Fei, L. (2009). Imagenet: A large-scale hierarchical
image database. In 2009 IEEE Conference on Com-
puter Vision and Pattern Recognition, pages 248–255.
Devlin, J., Chang, M.-W., Lee, K., and Toutanova, K.
(2019). BERT: Pre-training of deep bidirectional
transformers for language understanding. In Proceed-
ings of the 2019 Conference of the Association for
Computational Linguistics, pages 4171–4186.
Diao, Q., Jiang, Y., Wen, B., Sun, J., and Yuan,
Z. (2022). Metaformer: A unified meta frame-
work for fine-grained recognition. arXiv pre-print
arXiv:2203.02751.
Ding, Y., Zhou, Y., Zhu, Y., Ye, Q., and Jiao, J. (2019). Se-
lective sparse sampling for fine-grained image recog-
nition. In 2019 IEEE/CVF International Conference
on Computer Vision (ICCV), pages 6598–6607.
Do, T., Tran, H., Tjiputra, E., Tran, Q. D., and Nguyen,
A. (2022). Fine-grained visual classification us-
ing self assessment classifier. arXiv pre-print
arXiv:2205.10529.
Dosovitskiy, A., Beyer, L., Kolesnikov, A., Weissenborn,
D., Zhai, X., Unterthiner, T., Dehghani, M., Minderer,
M., Heigold, G., Gelly, S., Uszkoreit, J., and Houlsby,
N. (2021). An image is worth 16x16 words: Trans-
formers for image recognition at scale. In Interna-
tional Conference on Learning Representations.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
36

Gao, Y., Han, X., Wang, X., Huang, W., and Scott, M.
(2020). Channel interaction networks for fine-grained
image categorization. AAAI Conference on Artificial
Intelligence, 34(07):10818–10825.
Gatys, L. A., K
¨
ummerer, M., Wallis, T. S. A., and Bethge,
M. (2017). Guiding human gaze with convolutional
neural networks. arXiv pre-print arXiv:1712.06492.
Ge, W., Lin, X., and Yu, Y. (2019). Weakly supervised
complementary parts models for fine-grained image
classification from the bottom up. In 2019 IEEE/CVF
Conference on Computer Vision and Pattern Recogni-
tion (CVPR), pages 3029–3038.
Girdhar, R., Carreira, J. J., Doersch, C., and Zisserman, A.
(2019). Video action transformer network. In 2019
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition (CVPR), pages 244–253.
Hagiwara, A., Sugimoto, A., and Kawamoto, K. (2011).
Saliency-based image editing for guiding visual atten-
tion. PETMEI’11 - Proceedings of the 1st Interna-
tional Workshop on Pervasive Eye Tracking and Mo-
bile Eye-Based Interaction.
He, J., Chen, J.-N., Liu, S., Kortylewski, A., Yang, C., Bai,
Y., and Wang, C. (2022). Transfg: A transformer ar-
chitecture for fine-grained recognition. AAAI Confer-
ence on Artificial Intelligence, 36(1):852–860.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In 2016 IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 770–778.
He, S., Luo, H., Wang, P., Wang, F., Li, H., and Jiang,
W. (2021). Transreid: Transformer-based object re-
identification. In 2021 IEEE/CVF International Con-
ference on Computer Vision, pages 14993–15002.
He, X. and Peng, Y. (2017). Weakly supervised learning of
part selection model with spatial constraints for fine-
grained image classification. Proceedings of the AAAI
Conference on Artificial Intelligence, 31(1).
Horn, G. V., Aodha, O. M., Song, Y., Cui, Y., Sun, C.,
Shepard, A., Adam, H., Perona, P., and Belongie, S.
(2018). The inaturalist species classification and de-
tection dataset. In 2018 Conference on Computer Vi-
sion and Pattern Recognition, pages 8769–8778.
Huang, S., Xu, Z., Tao, D., and Zhang, Y. (2016). Part-
stacked cnn for fine-grained visual categorization. In
2016 IEEE Conference on Computer Vision and Pat-
tern Recognition (CVPR), pages 1173–1182.
Jiang, Y., Xu, K., Wang, X., Li, Y., Cui, H., Tao, Y., and Lin,
H. (2022). Satformer: Saliency-guided abnormality-
aware transformer for retinal disease classification in
fundus image. In The 33st International Joint Confer-
ence on Artificial Intelligence, pages 987–994.
Khan, F., Weijer, J., Bagdanov, A., and Vanrell, M. (2011).
Portmanteau vocabularies for multi-cue image repre-
sentation. In Advances in Neural Information Process-
ing Systems, volume 24.
Khan, F. S., Anwer, R. M., van de Weijer, J., Felsberg, M.,
and Laaksonen, J. (2015). Compact color–texture de-
scription for texture classification. Pattern Recogni-
tion Letters, 51:16–22.
Khosla, A., Jayadevaprakash, N., Yao, B., and Fei-Fei, L.
(2011). Novel dataset for fine-grained image catego-
rization. In IEEE Conference on Computer Vision and
Pattern Recognition.
Krause, J., Stark, M., Deng, J., and Fei-Fei, L. (2013). 3d
object representations for fine-grained categorization.
In 2013 IEEE International Conference on Computer
Vision Workshops, pages 554–561.
Lee, S. H., Lee, S., and Song, B. C. (2021). Vision
transformer for small-size datasets. arXiv pre-print
arXiv:2112.13492.
Liu, X., Wang, L., and Han, X. (2022). Transformer with
peak suppression and knowledge guidance for fine-
grained image recognition. Neurocomputing, 492.
Liu, Z., Lin, Y., Cao, Y., Hu, H., Wei, Y., Zhang, Z., Lin,
S., and Guo, B. (2021). Swin transformer: Hierarchi-
cal vision transformer using shifted windows. In 2021
IEEE/CVF International Conference on Computer Vi-
sion (ICCV), pages 9992–10002.
Luo, W., Yang, X., Mo, X., Lu, Y., Davis, L. S., Li, J.,
Yang, J., and Lim, S.-N. (2019). Cross-x learning for
fine-grained visual categorization. 2019 International
Conference on Computer Vision, pages 8241–8250.
Maji, S., Rahtu, E., Kannala, J., Blaschko, M., and Vedaldi,
A. (2013). Fine-grained visual classification of air-
craft. arXiv pre-print arXiv:2102.04306.
Mechrez, R., Shechtman, E., and Zelnik-Manor, L. (2018).
Saliency driven image manipulation. In 2018 IEEE
Winter Conference on Applications of Computer Vi-
sion (WACV), pages 1368–1376.
Mejjati, Y. A., Gomez, C. F., Kim, K. I., Shechtman, E., and
Bylinskii, Z. (2020). Look here! a parametric learning
based approach to redirect visual attention. In ECCV
2020: 16th European Conference, page 343–361.
Nilsback, M.-E. and Zisserman, A. (2008). Automated
flower classification over a large number of classes.
In 2008 Sixth Indian Conference on Computer Vision,
Graphics & Image Processing, pages 722–729.
Qin, X., Zhang, Z., Huang, C., Dehghan, M., Zaiane, O. R.,
and Jagersand, M. (2020). U2-net: Going deeper with
nested u-structure for salient object detection. Pattern
Recognition, 106:107404.
Song, C., Huang, Y., Ouyang, W., and Wang, L. (2018).
Mask-guided contrastive attention model for person
re-identification. In 2018 Conference on Computer Vi-
sion and Pattern Recognition, pages 1179–1188.
Sun, H., He, X., and Peng, Y. (2022). Sim-trans:
Structure information modeling transformer for fine-
grained visual categorization. arXiv pre-print
arXiv:2208.14607.
Sun, P., Cao, J., Jiang, Y., Zhang, R., Xie, E., Yuan, Z.,
Wang, C., and Luo, P. (2020). Transtrack: Multi-
ple object tracking with transformer. arXiv pre-print
arXiv:2012.15460.
Touvron, H., Cord, M., Douze, M., Massa, F., Sablayrolles,
A., and Jegou, H. (2021). Training data-efficient im-
age transformers &; distillation through attention. In
Proceedings of the 38th International Conference on
Machine Learning, volume 139, pages 10347–10357.
Salient Mask-Guided Vision Transformer for Fine-Grained Classification
37

Tsai, Y.-H. H., Bai, S., Liang, P. P., Kolter, J. Z., Morency,
L.-P., and Salakhutdinov, R. (2019). Multimodal
transformer for unaligned multimodal language se-
quences. In The 57th Annual Meeting of the Associa-
tion for Computational Linguistics, pages 6558–6569.
Van Horn, G., Branson, S., Farrell, R., Haber, S., Barry,
J., Ipeirotis, P., Perona, P., and Belongie, S. (2015).
Building a bird recognition app and large scale dataset
with citizen scientists. In Computer Vision and Pattern
Recognition (CVPR).
Vaswani, A., Shazeer, N., Parmar, N., Uszkoreit, J., Jones,
L., Gomez, A. N., Kaiser, L. u., and Polosukhin, I.
(2017). Attention is all you need. In Advances in
Neural Information Processing Systems, volume 30.
Wang, H., Zhu, Y., Adam, H., Yuille, A., and Chen, L.
(2021a). Max-deeplab: End-to-end panoptic segmen-
tation with mask transformers. In 2021 IEEE/CVF
Conference on Computer Vision and Pattern Recog-
nition (CVPR), pages 5459–5470.
Wang, J., Yu, X., and Gao, Y. (2021b). Feature fusion vision
transformer for fine-grained visual categorization. In
2021 British Machine Vision Conference (BMVC).
Wang, J., Yu, X., and Gao, Y. (2021c). Mask guided atten-
tion for fine-grained patchy image classification. In
2021 IEEE International Conference on Image Pro-
cessing (ICIP). IEEE.
Wang, L., Lu, H., Wang, Y., Feng, M., Wang, D., Yin, B.,
and Ruan, X. (2017). Learning to detect salient objects
with image-level supervision. In IEEE Conference on
Computer Vision and Pattern Recognition.
Wang, Y., Morariu, V. I., and Davis, L. S. (2018). Learning a
discriminative filter bank within a cnn for fine-grained
recognition. In 2018 Conference on Computer Vision
and Pattern Recognition, pages 4148–4157.
Wang, Z., Wang, S., Yang, S., Li, H., Li, J., and Li, Z.
(2020). Weakly supervised fine-grained image classi-
fication via guassian mixture model oriented discrim-
inative learning. In 2020 Conference on Computer Vi-
sion and Pattern Recognition, pages 9746–9755.
Welinder, P., Branson, S., Mita, T., Wah, C., Schroff, F., Be-
longie, S., and Perona, P. (2010). Caltech-ucsd birds
200. Technical Report CNS-TR-201, Caltech.
Xiao, T., Xu, Y., Yang, K., Zhang, J., Peng, Y., and
Zhang, Z. (2015). The application of two-level atten-
tion models in deep convolutional neural network for
fine-grained image classification. In 2015 IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 842–850.
Xie, E., Wang, W., Wang, W., Sun, P., Xu, H., Liang,
D., and Luo, P. (2021a). Segmenting transparent ob-
ject in the wild with transformer. arXiv pre-print
arXiv:2101.0846.
Xie, J., Pang, Y., Khan, M. H., Anwer, R. M., Khan, F. S.,
and Shao, L. (2021b). Mask-guided attention network
and occlusion-sensitive hard example mining for oc-
cluded pedestrian detection. IEEE Transactions on
Image Processing, 30:3872–3884.
Xie, L., Tian, Q., Hong, R., Yan, S., and Zhang, B. (2013).
Hierarchical part matching for fine-grained visual cat-
egorization. In 2013 IEEE International Conference
on Computer Vision, pages 1641–1648.
Yang, S., Liu, S., Yang, C., and Wang, C. (2021). Re-rank
coarse classification with local region enhanced fea-
tures for fine-grained image recognition. arXiv pre-
print arXiv:2102.09875.
Yu, C., Zhao, X., Zheng, Q., Zhang, P., and You, X. (2018).
Hierarchical bilinear pooling for fine-grained visual
recognition. In 2018 European Conference on Com-
puter Vision (ECCV), pages 595–610.
Yu, F., Huang, K., Wang, M., Cheng, Y., Chu, W., and Cui,
L. (2022). Width & depth pruning for vision trans-
formers. Proceedings of the AAAI Conference on Ar-
tificial Intelligence, 36(3):3143–3151.
Yu, X., Zhao, Y., Gao, Y., Yuan, X., and Xiong, S. (2021).
Benchmark platform for ultra-fine-grained visual cat-
egorization beyond human performance. In Proceed-
ings of the IEEE/CVF International Conference on
Computer Vision (ICCV), pages 10285–10295.
Zhang, Y., Cao, J., Zhang, L., Liu, X., Wang, Z., Ling, F.,
and Chen, W. (2022). A free lunch from vit: adap-
tive attention multi-scale fusion transformer for fine-
grained visual recognition. In 2022 IEEE Interna-
tional Conference on Acoustics, Speech and Signal
Processing, pages 3234–3238.
Zhao, B., Wu, X., Feng, J., Peng, Q., and Yan, S. (2017).
Diversified visual attention networks for fine-grained
object classification. IEEE Transactions on Multime-
dia, 19(6):1245–1256.
Zhao, Y., Yu, X., Gao, Y., and Shen, C. (2022). Learn-
ing discriminative region representation for person re-
trieval. Pattern Recognition, 121:108229.
Zheng, H., Fu, J., Zha, Z., and Luo, J. (2019a). Looking
for the devil in the details: Learning trilinear attention
sampling network for fine-grained image recognition.
In 2019 IEEE/CVF Conference on Computer Vision
and Pattern Recognition (CVPR), pages 5007–5016.
Zheng, H., Fu, J., Zha, Z.-J., and Luo, J. (2019b). Learn-
ing deep bilinear transformation for fine-grained im-
age representation. In Advances in Neural Information
Processing Systems, volume 32.
Zheng, S., Lu, J., Zhao, H., Zhu, X., Luo, Z., Wang, Y.,
Fu, Y., Feng, J., Xiang, T., Torr, P. H., and Zhang,
L. (2021). Rethinking semantic segmentation from a
sequence-to-sequence perspective with transformers.
In 2021 IEEE/CVF Conference on Computer Vision
and Pattern Recognition (CVPR), pages 6877–6886.
Zhou, B., Lapedriza, A., Xiao, J., Torralba, A., and Oliva,
A. (2014). Learning deep features for scene recog-
nition using places database. In Advances in Neural
Information Processing Systems, page 487–495.
Zhu, H., Ke, W., Li, D., Liu, J., Tian, L., and Shan, Y.
(2022). Dual cross-attention learning for fine-grained
visual categorization and object re-identification. In
2022 IEEE/CVF Conference on Computer Vision and
Pattern Recognition (CVPR), pages 4682–4692.
Zhu, X., Su, W., Lu, L., Li, B., Wang, X., and Dai, J. (2021).
Deformable DETR: Deformable transformers for end-
to-end object detection. In International Conference
on Learning Representations.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
38
