
Deep W-Networks: Solving Multi-Objective Optimisation Problems with
Deep Reinforcement Learning
Jernej Hribar, Luke Hackett and Ivana Dusparic
School of Computer Science and Statistics, Trinity College Dublin, Ireland
Keywords:
Deep Reinforcement Learning, Deep Q-Networks, W-Learning, Deep W-Networks, and Multi-Objective.
Abstract:
In this paper, we build on advances introduced by the Deep Q-Networks (DQN) approach to extend the multi-
objective tabular Reinforcement Learning (RL) algorithm W-learning to large state spaces. W-learning algo-
rithm can naturally solve the competition between multiple single policies in multi-objective environments.
However, the tabular version does not scale well to environments with large state spaces. To address this
issue, we replace underlying Q-tables with DQN, and propose an addition of W-Networks, as a replacement
for tabular weights (W) representations. We evaluate the resulting Deep W-Networks (DWN) approach in
two widely-accepted multi-objective RL benchmarks: deep sea treasure and multi-objective mountain car. We
show that DWN solves the competition between multiple policies while outperforming the baseline in the form
of a DQN solution. Additionally, we demonstrate that the proposed algorithm can find the Pareto front in both
tested environments.
1 INTRODUCTION
Many real world problems such as radio resource
management (Giupponi et al., 2005), infectious dis-
ease control (Wan et al., 2020), energy-balancing in
sensor networks (Hribar et al., 2022), etc., can be for-
mulated as a multi-objective optimisation problem.
Whenever an agent is tackling such a problem in a
dynamic environment, a single objective Reinforce-
ment Learning (RL) methods such as Q-learning will
not result in a behaviour that will be optimal for all
objectives. Instead, the single objective solution will
most likely prefer one objective over others. Al-
ternatively, the agent can employ a Multi-Objective
Reinforcement Learning (MORL) method. Unfortu-
nately, while much work has been completed in tabu-
lar MORL (Liu et al., 2015), the curse of dimension-
ality limits the applicability of these methods to real-
world problems. The curse of dimensionality refers to
the challenges that come with organizing and analyz-
ing data that has an intractably and/or infinitely large
state-space, for example, using images as input states.
Recent developments in RL merged Q-Learning with
Neural Networks (Mnih et al., 2013), vastly expand-
ing the complexity of problems that could be tackled
with RL. Work has been done in the past few years in
order to employ Deep Q-Networkss (DQNs) to solve
Multi-Objective problems (Liu et al., 2015). How-
ever, most of the proposed solutions have drawbacks.
These drawbacks range from a required high number
of sampled experiences to train the neural networks,
which will take an extended amount of time, to adding
complexity by creating new types of networks with
altered memory storage. To overcome these obsta-
cles, in this paper, we propose a deep learning ex-
tension to a tabular multi-objective technique called
W-learning (Humphrys, 1995).
W-Learning was first proposed in the late
90’s (Humphrys, 1995), as a multi-policy way to solve
multi-Objective problems that use Q-Learning agents
with a single objective as part of a larger system. The
main principle is that there will be many Q-Learning
agents, each with a different policy. These agents
will all suggest an action that will be selfish, and the
best action will need to be determined from these sug-
gested selfish actions. The goal of W-Learning is to
determine which of these actions should be selected,
ensuring the right agent “wins”. The way it deter-
mines this is by attempting to figure out how much
the agent cares about the action that it suggests. Some
scenarios or states might not impact the reward of cer-
tain agents so much however it may massively im-
pact one or some of them. W-learning has been suc-
cessfully applied in a range multi-objective problems,
from speed limit control on highways (Kusic et al.,
2021), smart grid (Dusparic et al., 2015), and con-
Hribar, J., Hackett, L. and Dusparic, I.
Deep W-Networks: Solving Multi-Objective Optimisation Problems with Deep Reinforcement Lear ning.
DOI: 10.5220/0011610300003393
In Proceedings of the 15th International Conference on Agents and Artificial Intelligence (ICAART 2023) - Volume 2, pages 17-26
ISBN: 978-989-758-623-1; ISSN: 2184-433X
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
17

flict detection in self-adaptive systems (Cardozo and
Dusparic, 2020). However, as W-learning was pro-
posed long before deep learning was successfully im-
plemented in RL to deal with the curse of dimen-
sionality (Mnih et al., 2013), this limited the domains
and scale of problems that W-Learning can be applied
to. In this paper, we take advantage of advances in-
troduced by DQN to train multiple Artificial Neural
Network (ANN) on different objectives and propose
a new “deep” variant of W-Learning to address com-
petition between these objectives.
One of the most significant advantages of multi-
policy algorithms over single-policy, e.g., Q-learning,
is in their ability to find the Pareto Optimal be-
haviour(Jin and Sendhoff, 2008). To be Pareto Op-
timal, the agent’s actions must be such that an im-
provement in its decision process for an objective will
not harm the reward for any other objective. Single-
policy algorithms rely on some specification of pref-
erences for given objectives and, therefore, will not
necessarily find the policy that will result in the opti-
mal Pareto front. In other words, multi-objective al-
gorithms require less information about the environ-
ment before training and are generally more favoured
for use in offline learning.
Our proposed Deep W-Networks (DWN) algo-
rithm takes advantage of the computational efficiency
of single-policy algorithms by considering each ob-
jective separately. These policies will suggest a self-
ish action that will only maximise their own reward.
However, the DWN resolves the competition be-
tween greedy single-objective policies by relying on
W-values representing policies’ value to the system.
These W-values can be learned with interaction with
the environment, following logical steps similar to a
well-known Q-learning algorithm. In our proposed
implementation, we employ two DQNs for each ob-
jective. One DQN is used to learn a greedy policy
for the given objective, while the second DQN has
only one output representing the policy’s W-value for
a given state input. Furthermore, DWN has the ben-
efit of training all policies simultaneously, which al-
lows for a faster learning process. Additionally, DWN
can take advantage of modularity, meaning that poli-
cies can be trained separately and then included in the
DWN agent. Modularity also enables policies to be
altered, e.g., the reward function is changed, added,
or deactivated, without the need to re-train all other
policies.
The rest of the paper is organised as follows. In
the next section, we discuss the most important de-
sign features of Deep Reinforcement Learning (DRL)
introduced in the last decade and related work. In sec-
tion 3 we present and describe our proposed DWN al-
gorithm. Followed by evaluation section 4, in which
we employ two multi-objective environments: multi-
objective mountain car and deep sea treasure. We
show in both environments that DWN is capable of
resolving the competition between multiple policies
while outperforming the baseline in the form of DQN
solution. Finally, we provide concluding remarks in
section 5.
2 BACKGROUND
In this section, we introduce the essential elements
required to understand DRL and review related algo-
rithms capable of resolving multi-objective problems.
2.1 Deep Reinforcement Learning
The goal of RL algorithm is to find the optimal policy
π
∗
for an environment that is fully characterised with
an Markov Decision Process (MDP) (LeCun et al.,
2015). With MDP we describe a sequential decision-
making process in a form of a state-space S , an action
space A, a reward function R, and a set of transition
probabilities between the states P . In such settings,
the optimal policy π
∗
is the policy that will maximise
the long-term reward.
An example of a DRL algorithm that revolu-
tionised the field in 2013 is DQN. The DQN algo-
rithm is a deep learning extension of a well-known
action-value algorithm named Q-learning. In action-
value based methods, the agent interacts with the en-
vironment by taking actions a and receiving a reward
r that indicates if the taken action was desirable or
not. The Q represents the quality of an action-value
Q(s,a), with s representing the state. The objective
of the RL algorithm is to accurately estimate Q val-
ues for all action-values using a Bellman equation.
Once the agent can accurately determine all values,
it can find the optimal policy π
∗
for selection actions
that will maximise the expected reward r + γQ(s
0
,a
0
),
with γ representing the discount for rewards obtained
in next time-step. The Q-values are updated in itera-
tions as follows:
Q
i
+
1
(s,a) = E
s∼S
r = γ max Q
∗
(s
0
,a
0
)|s,a
; (1)
and converge to the optimal value when:
Q
i
→ Q
∗
as i → ∞. (2)
However, such an iterative approach requires the
agent to explore the entire state space, i.e., try all pos-
sible action in every state. In practice, such an ap-
proach is impossible as such exploration would take a
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
18

gargantuan amount of time and computational power.
Instead, a state-space approximator is used. An exam-
ple of a very effective non-linear state-space approxi-
mator is ANN.
In the DQN, a ANN function approximator with
weights θ is employed to represent Q-network. The
agent uses the network to estimate the action-values,
i.e., Q(s,a;θ) ≈ Q
∗
(s,a). The values in the ANN are
updated, i.e., trained, at each iteration i by minimising
the loss:
L
i
(θ
i
) = E
s,a∼ρ(·);s
0
∼S
(y
i
− Q(s,a;θ
i
))
2
, (3)
where y
i
= E
s∼S
[r + γmax
a
0
Q(s
0
,a
0
;θ
i−1
|s,a] repre-
sent target and ρ is the probability distribution over
sequences. Note that when determining the target, the
values from the previous iteration, i.e., θ
i−1
, are held
fixed. The gradient of the loss function is then deter-
mined as:
∇
θ
i
L
i
(θ
i
) = E
s,a∼ρ(·);s
0
∼S
r +γmax
a
0
Q(s
0
,a
0
;θ
i−1
−
Q(s,a)
∇
θ
i
Q(s,a;Q
i
)
. (4)
In practice, the loss function is optimised using gra-
dient descent as it is less computation-intensive than
computing the expectation E directly. However, the
training process can be unstable and prone to con-
verge to a local optimum. To remedy this issue, the
DQN introduced experience replay and the use of pol-
icy and target ANN.
Experience replay is a batch memory M into
which the agent is storing experiences. An experience
typically consist of a state, the next state, selected ac-
tion, and obtained reward, i.e., a tuple < s,a,s
0
,r >.
The agent often samples experiences uniformly ran-
domly during the training process. However, be-
cause not all experiences are equal in terms of im-
portance to the learning process, a much better ap-
proach is to prioritise them, i.e., increase the proba-
bility of their selection. Using Prioritised Experience
Replay (PER)(Schaul et al., 2015) we determine the
probability of sampling an experience i as:
P(i) =
p
ζ
i
∑
K
p
ζ
K
, (5)
with factor ζ,ζ ∈ [0, 1] controlling the degree to which
experiences are prioritised. Using PER can signifi-
cantly reduce the time the agent requires to find the
optimal policy. To further stabilise the learning pro-
cess, the DQN algorithm introduced the use of tar-
get ANN for estimating the Q(s
0
,a
0
) during training.
Such an approach is necessary because using the same
ANN for determining both Q-values can results in
very similar estimations due to possible small differ-
ence in s and s
0
. Therefore, using a target policy for
Q(s
0
,a
0
) estimation can prevent such occurrences.
In our work, we adopt these aforementioned ad-
vances to extend the original W-learning algorithm
usability in large state spaces.
2.2 Multi-Objective Reinforcement
Learning
Existing RL methods employed for resolving multi-
objective optimisation problems can be generalised
into two groups: tabular RL and DRL methods.
An example of a tabular methods are GM-Sarsa(0)
(Sprague and Ballard, 2003) and its extension with
weighted sum approach (Karlsson, 1997). GM-
Sarsa(0) (Sprague and Ballard, 2003) aims to find
good policies concerning the composite tasks as op-
posed to finding the best policy for each task and then
merging these into a single policy. On the other hand,
the authors in (Karlsson, 1997) proposed to use a syn-
thetic objective function to emphasise the importance
of each objective in the form of weight for Q-values.
Unfortunately, neither of these methods performs well
in finding the optimal multi-objective policy. Addi-
tionally, the performance of the tabular methods dete-
riorates when applied in environments with large state
spaces.
The second group, DRL methods (Mossalam
et al., 2016; Nguyen et al., 2020; Tajmajer, 2018;
Abels et al., 2019), can deal with large state
spaces. The deep optimistic linear support learn-
ing (Mossalam et al., 2016) is an example of the first
known extension of the DQN that dealt with multi-
objectivity. The limitation of linear support approach
is in redundant computations and additional required
representations. Both limitations can be overcome in
two-stage multi-objective DRL (Nguyen et al., 2020)
approach. In the latter, once policies are learned,
policy-independent parameters are tuned using a sep-
arate algorithm that attempts to estimate the Pareto
frontier of the system. Similarly, modular multi-
objective DRL with subsumption architecture (Taj-
majer, 2018) was proposed that combines the results
of single policies, represented by a DQN, to take the
action most amenable to all rewards for each envi-
ronment step. The approach resembles a voting sys-
tem with Q-values representing a vote for a certain
policy. Finally, dynamic weights in multi-objective
DRL (Abels et al., 2019) were proposed to deal with
situations where the relative importance of weights
changes during training. In contrast, our proposed
DWN has the benefit of simultaneously training all
Deep W-Networks: Solving Multi-Objective Optimisation Problems with Deep Reinforcement Learning
19

policies, which allows for a faster dynamic adjust-
ment of policy rewards that the above DRLs methods
lack.
3 DEEP W-LEARNING
FRAMEWORK
In this section, we detail out our proposed multi-
objective DWN approach. We denote the multi-
objective environment with tuple < N,S ,A,R , Π >
in which N is the number of policies, S represents
the state space, A is the set of all available actions,
R = {R
1
,...,R
N
} is set of reward functions, and Π =
π,...,π
N
denotes the set of available policies. At
each decision epoch t policies observe the same state
s(t) ∈ S and every policy suggest an action. The
agent’s objective is to select the best possible action
from the vector of actions nominated by agents for
execution at that time-step a(t) = {a
1
(t),..., a
N
(t)}.
Furthermore, we denote the selected action at time-
step t with index j, i.e., the selected action is denoted
as a
j
(t). Additionally, within our environment, we
use Π
− j
to denote the set containing all polices ex-
cept the j-th one.
The agent making the decision in a multi-objective
environment at each time-step has to determine to
what extent it will take into account each of the ob-
jectives. In other words, the agent has to continuously
keep resolving the competition between multiple ob-
jectives. In W-learning, each objective is represented
with a single Q-learning policy; each Q-learning pol-
icy has a different goal and, depending on the ob-
served state s(t), suggests a greedy action a
i
(t). These
actions are often conflicting with each other, and to
resolve the competition, the agent learns a table of
weights for each state, called the W-values. For each
observed state s(t), the agent obtains W
i
(t) where i is
the index of the policy. The agent then takes the ac-
tion suggested by the policy associated with the high-
est W
i
(t):
W
j
(t) = max ({W
1
(t),...,W
N
(t)}). (6)
Note that the index j marks the W-value of the policy
the agent has selected. Updating the W-values fol-
lows a very similar formulation as updating the Q-
values(Eq.1):
W
i
(t) ← (1 − α)W
i
(t) + α
Q(s(t),a
j
(t)) − (R
i
(t)+
γ max
a
i
(t+1)∈A
Q(s(t + 1), a
i
(t + 1))
. (7)
However, the agent will not update the W-value of the
selected policy, i.e., the agent only updates W-values
for set of policies Π
− j
. Excluding W-Learning update
for the selected policy allows other policies to emerge
as the leader overtime. Such an approach is accept-
able in practice as polices become more adept at their
given task. Additionally, the updating constraint only
applies for W-values, the agent will update Q-values
for every policy, i.e., for the set Π.
Algorithm 1: Deep W-Learning with PER.
1: Input: Minibatch size K, replay memory size M,
exploration rates ε
Q
, ε
W
, smoothing factor ζ, ex-
ponent β, w-learning learning rate α, soft update
factors τ
Q
, τ
W
2: Initialize N Q-networks θ
Q
i
, target
ˆ
θ
Q
i
, and replay
memory D
Q
i
∀i ∈ {1,. ..,N}
3: Initialize N W-networks θ
W
i
, target
ˆ
θ
W
i
, and re-
play memory D
W
i
∀i ∈ {1,. ..,N}
4: for t = 0 to T − 1 do
5: Observe s(t),s(t) ∈ S
6: // Nominate actions using epsilon-greedy
approach (ε
Q
)
7: Get a(t) = {a
1
(t),..., a
N
(t)}
8: Get W
i
(t)∀i ∈ {1, .. .,N}
9: // Select and execute action using
epsilon-greedy approach (ε
W
)
10: Get j-th policy with the highest W-value
using Eq. 6
11: Execute action a
j
(t), and observe
state s(t + 1)
12: Initiate policy training with Alg. 2
13: Initiate W training with Alg. 3
14: end for
In our proposed DWN implementation, each pol-
icy has two DQN networks. The role of the first DQN
is to determine Q-values for the given policy, i.e., for
greedy actions the policy will suggest. On the other
hand, the second DQN has only one output, repre-
senting the W-value, and replaces a tabular represen-
tation of state-W-value pairs present in the original
W-learning implementation. We summarise the pro-
posed DWN in Alg. 1. Each policy requires two re-
play memories, one for Q-networks and another for
the W-networks. Such a split is necessary because the
agent will store a W-learning experience only when
the agent did not select the policy. Additionally, we
employed PER (Schaul et al., 2015) in our implemen-
tation to expedite the learning process.
The most significant aspect of the proposed DWN
algorithm is the action-nomination step. In the action
nomination step, each policy suggests a greedy action
with an epsilon probability that it will select a ran-
dom action. Similarly, the agent will select the policy
with the highest W-value but with epsilon probability,
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
20
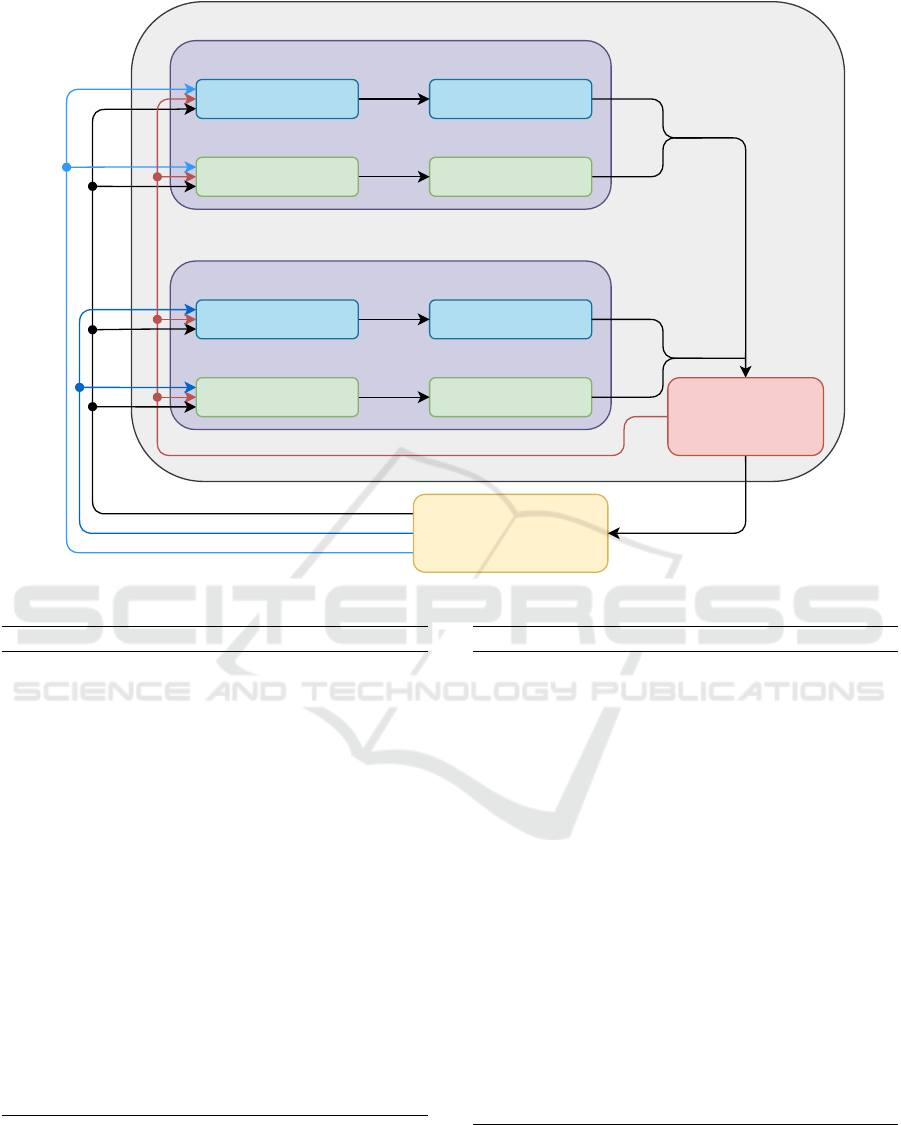
Deep W-Networks Agent
Environment
Q-Policy
W-Values
Policy 1
Q Memory
W Memory
Select the action of the
policy with the highest
W-value
Policy
Training
W Training
Q-Policy
W-Values
Policy N
Q Memory
W Memory
Policy
Training
W Training
.
.
.
State
Reward for Policy N
Reward for Policy 1
Q-values
Q-values
W-value
W-value
Action
Selected Policy and Action
Figure 1: Deep W-Networks architecture.
Algorithm 2: Policy Training.
1: Input:Π, D
Q
i
,i ∈ {1,...,N}, K, M, ζ, β, θ
Q
i
,i ∈
{1,...,N},
ˆ
θ
Q
i
,i ∈ {1,...,N}
2: for each π
i
in Π do
3: Determine reward r
i
(t) using function R
i
4: Store experience (s(t),a
j
(t),r
i
(t),s(t + 1)
in D
Q
i
with priority p
t
= max
m<t
p
m
5: for each k = 1 to K do
6: Sample transition k ∼ P(k) = p
ζ
k
/
∑
m
p
ζ
m
7: Compute importance-sampling weight:
ω
k
= (MP( j))
−β
/max
m
ω
m
8: Update transition priority p
k
← |δ
k
|
9: Accumulate weight-change:
∆ ← ∆ +ω
k
·δ
k
·∇
θ
i
Q(s(k − 1),a
j
(k − 1)
10: end for
11: Update weights θ
Q
i
← θ
Q
i
+ η · ∆, reset ∆ = 0
12: Soft update target network:
ˆ
θ
Q
i
← τ
Q
θ
Q
i
+ (1 − τ
Q
)
ˆ
θ
Q
i
13: Update ε
Q
using decay
14: end for
it might decide to explore, i.e., select the policy ran-
domly. W-values exploration is necessary to avoid a
single policy prevailing at the start of the learning due
to high randomly initialized values and batch learn-
Algorithm 3: W Training.
1: Input:Π, D
W
i
,i ∈ {1, ...,N}, K, M, ζ, β, θ
W
i
,i ∈
{1,...,N},
ˆ
θ
W
i
,i ∈ {1,...,N}
2: for each π
i
in Π
− j
do
3: Determine reward r
i
(t) using function R
i
4: Store experience (s(t),a
j
(t),r
i
(t),s(t + 1)
in D
W
i
with priority p
t
= max
m<t
p
m
5: end for
6: for each π
i
in Π do
7: for each k = 1 to K do
8: Sample transition k ∼ P(k) = p
ζ
k
/
∑
m
p
ζ
m
9: Compute importance-sampling weight:
ω
k
= (MP( j))
−β
/max
m
ω
m
10: Update transition priority p
k
← |δ
k
|
11: Accumulate weight-change ∆ using Eq. 7
12: end for
13: Update weights θ
W
i
← θ
W
i
+ η · ∆, reset ∆ = 0
14: Soft update target network:
ˆ
θ
W
i
← τ
W
θ
W
i
+ (1 − τ
W
)
ˆ
θ
W
i
15: Update ε
W
using decay
16: end for
ing. Before the learning process can start, the agent
requires a minimum of K experiences stored in the
replay memory to start the training process.
We summarise the steps to train the policy and W-
Deep W-Networks: Solving Multi-Objective Optimisation Problems with Deep Reinforcement Learning
21
networks in two algorithms and give an overview of
the DWN architecture in Fig. 1. During policy train-
ing (Alg. 2), each policy network optimises for the
highest reward for its target. Note that this process re-
mains unchanged from the original DQN implemen-
tation, but is an integral part of the proposed DWN.
After Q networks have been through a few updates the
W training (Alg. 3) can begin. We achieve the delay
by keeping the batch size for both policy and W train-
ing the same, or greater. The W policy saves the expe-
rience only when it was not selected. In Alg. 3, line 3
we save the W experiences of all policies but j-th,
which was selected (in line 10, Alg. 1). Consequently,
we achieve the delay in training the W networks. Ep-
silon greedy approach of selecting W-values ensures
that the agent does not select the same W network in
every step at the start of the training. In the next sec-
tion, we demonstrate how DWN performs in a multi-
objective environment.
4 EVALUATION
In this section, we evaluate
1
the proposed DWN using
two multi-objective environments: multi-objective
mountain car and deep sea treasure. The state space
in the first environment is hand-crafted and is repre-
sented by only a two-input state vector. The two in-
puts are the car’s position and velocity. The simplified
case enables us to analyse DWN performance in more
detail. On the other hand, in the second environment,
the deep sea treasure, we use visual inputs as states
to demonstrate that DWN performs well in environ-
ments with large state spaces.
4.1 Multi-Objective Mountain Car
The first environment, called Multi-Objective Moun-
tain Car presents a scenario where a car is stuck in the
middle of a valley. The car must reach the top of the
valley. However, the car does not have enough power
to reach the top by driving directly forward. Instead,
the agent has to learn to first move away from its ob-
jective, by reversing up the hill to gain momentum,
in order to reach it. We use the environment, with
minor modifications, as defined in (Vamplew et al.,
2011). The only alteration we made is the maximal
number of steps allowed in an episode. We set the
limit to 2000 because the goal of analysis in this en-
vironment is to gain a deeper understanding of DWN
performance.
1
DWN algorithm implementation and evaluation code
is available on github.com/deepwlearning/deepwnetworks.
250 500 750 1000 1250 1500 1750 2000 2250
110
250
500
750
1,000
1,250
1,500
1,750
Episode number
Average number of steps needed to reach the top (over 10 episodes)
DQN
DWN
Pareto
250 500 750 1000 1250 1500 1750 2000 2250
110
250
500
750
1,000
1,250
1,500
1,750
Episode number
Average number of steps needed to reach the top (over 10 episodes)
DQN
DWN
Pareto
Figure 2: The number of steps, averaged over 10 episodes,
each approach requires to finish the episode, i.e., the car
reaching the top of the hill.
250 500 750 1000 1250 1500 1750 2000 2250
25
50
75
100
Episode number
Policy selection in the episode (average over 10 episodes)(%)
Time penalty policy
Backward acceleration penalty policy
Forward acceleration penalty policy
Figure 3: The percentage each policy in DWN agent selects
in an episode, averaged over 10 episodes.
The environment has three different objectives:
time penalty, backward acceleration penalty, and for-
ward acceleration penalty. As the name of each pol-
icy suggests, the time policy gives a negative re-
ward in every time step, except in the state when
the agent reaches the top, the backward acceleration
policy gives a negative reward when the agent is ac-
celerating backward, and analogously, forward accel-
eration penalty applies for the forward policy. The
agent has three available actions: accelerate forwards,
accelerate backward, or do nothing. We design the
DWN agent with three policies, one for each objec-
tive. For simplicity, we use the same ANN struc-
ture for all policies and for both Q and W networks,
i.e., θ
Q
i
,
ˆ
θ
Q
i
,θ
W
i
,
ˆ
θ
W
i
∀i. We use a feedforward ANN
structure with two hidden layers, each with 128 neu-
rons. On the output layer, to ensure better stability
of learning, we employ a dueling network architec-
ture (Wang et al., 2016), with 256 neurons. We list
hyper-parameters in Table 1.
In Fig. 2 we show the average number of steps, av-
eraged over ten episodes, the agent requires to reach
the top of the hill. The proposed DWN and DQN
algorithms both achieve similar performance in the
same number of episodes. Note that the DQN re-
ceives the reward in the form of a sum of three re-
ward signals, one for each policy the environment has.
Furthermore, for a fair comparison DQN employ the
same ANN structure as our DWN. Overall, the DWN
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
22
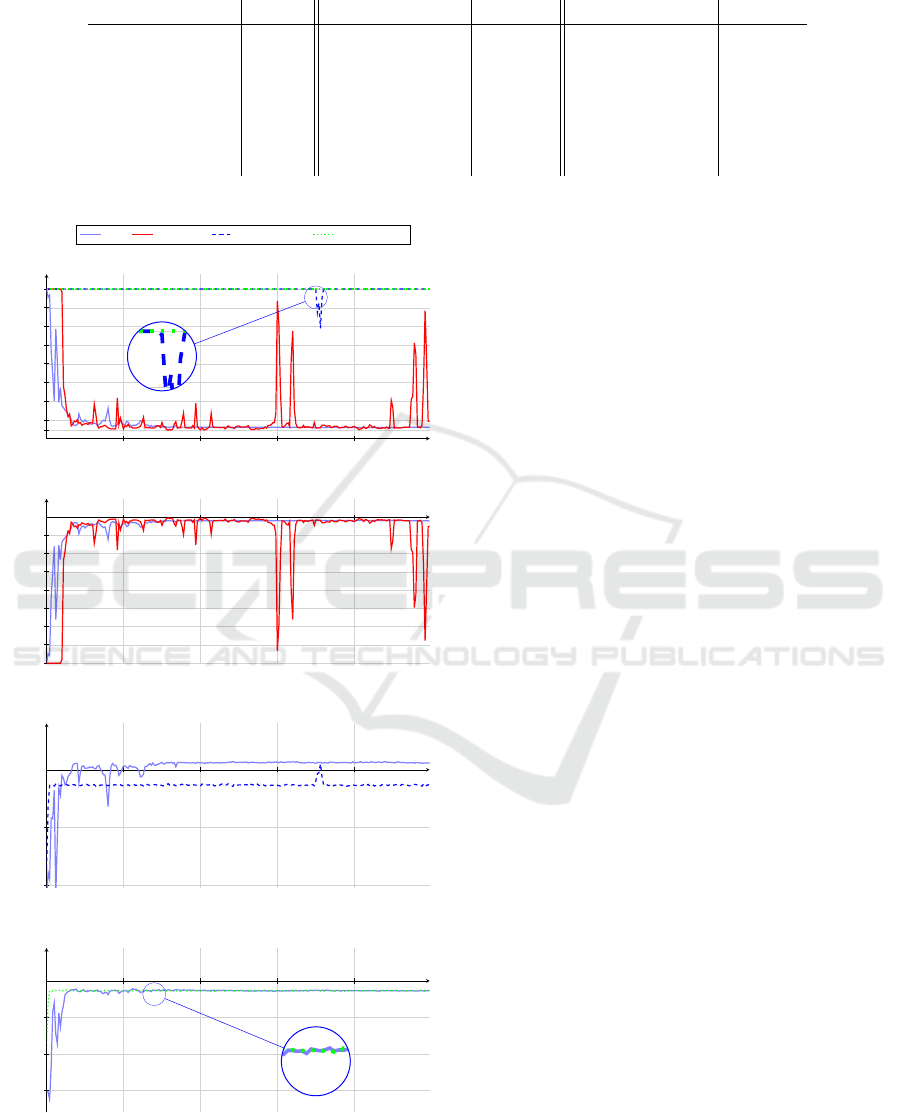
Table 1: Hyperparameters for the Mountain Car Environment.
Hyperparameter Value Hyperparameter Value Hyperparameter Value
γ 0.99 α
1 ∗ 10
−3
β 0.4
ε
Q
start
0.95
ε
Q
decay
0.995
ε
Q
min
0.1
ε
W
start
0.99
ε
W
decay
0.9995
ε
W
min
0.1
ζ 0.6
τ
Q
1 ∗ 10
−3
τ
W
1 ∗ 10
−3
Batch size K 1024 Memory size M
1 ∗ 10
4
Q Optimizer Adam
W Optimizer Adam Q learning rate
1 ∗ 10
−3
W learning rate
1 ∗ 10
−3
500 1000 1500 2000
110
250
500
750
1,000
1,250
1,500
1,750
2,000
Episode number
Average number of steps (over 10 episodes)
(a) Number of steps to reach the top
DWN
Time Policy Backward Policy Forward Policy
500 1000 1500 2000
−250
−500
−750
−1,000
−1,250
−1,500
−1,750
−2,000
Episode number
Average collected reward (over 10 episodes)
(b) Time Policy Performance
500 1000 1500 2000
−250
−500
Episode number
Average collected reward (over 10 episodes)
(c) Backward Acceleration Performance
500 1000 1500 2000
−250
−500
−750
Episode number
Average collected reward (over 10 episodes)
(d) Forward Acceleration Performance
500 1000 1500 2000
110
250
500
750
1,000
1,250
1,500
1,750
2,000
Episode number
Average number of steps (over 10 episodes)
(a) Number of steps to reach the top
DWN
Time Policy Backward Policy Forward Policy
500 1000 1500 2000
−250
−500
−750
−1,000
−1,250
−1,500
−1,750
−2,000
Episode number
Average collected reward (over 10 episodes)
(b) Time Policy Performance
500 1000 1500 2000
−250
−500
Episode number
Average collected reward (over 10 episodes)
(c) Backward Acceleration Performance
500 1000 1500 2000
−250
−500
−750
Episode number
Average collected reward (over 10 episodes)
(d) Forward Acceleration Performance
500 1000 1500 2000
110
250
500
750
1,000
1,250
1,500
1,750
2,000
Episode number
Average number of steps (over 10 episodes)
(a) Number of steps to reach the top
DWN
Time Policy Backward Policy Forward Policy
500 1000 1500 2000
−250
−500
−750
−1,000
−1,250
−1,500
−1,750
−2,000
Episode number
Average collected reward (over 10 episodes)
(b) Time Policy Performance
500 1000 1500 2000
−250
−500
Episode number
Average collected reward (over 10 episodes)
(c) Backward Acceleration Performance
500 1000 1500 2000
−250
−500
−750
Episode number
Average collected reward (over 10 episodes)
(d) Forward Acceleration Performance
Figure 4: The comparison of performance between a pol-
icy as standalone DQN agent and a policy as a part of the
proposed DWN.
performance is similar, albeit slightly more stable, to
DQN in the mountain car environment. A far more in-
teresting analysis is in individual policy performance
by itself or part of DWN.
In Fig. 3 we show the percentage, i.e., how many
times the DWN agent has selected an individual pol-
icy in an episode. At the start, the agent selects poli-
cies evenly. Such a behaviour is expected due to high
starting epsilon-greedy value. However, as the epsilon
decays with the number of episodes and Q-learning
DQN learn, the agent starts to prefer one policy over
the others. Interestingly, the backward accelerating
policy proves to prevailing policy as the DWN selects
it three times more often the other two policies com-
bined.
In Fig. 4 we compare DWN with the performance
of DQN when it receives only the reward of a particu-
lar policy. In Fig. 4 (a), we show the number of steps
each policy requires to reach the top. Besides DWN
and the DQN with time policy will reach the objec-
tive, i.e., arrive at the top of the hill. It appears, that
when the reward signal is the only backward and for-
ward policy the agent is unable, with a small excep-
tion, to learn to reach the top. However, when we look
at the amount of collected reward a particular policy
collects as part of DWN or individually is almost the
same. Meaning, that without exception policies learn
to maximise their rewards. Note that the difference of
100 in Fig. 4 (c) between DWN and backward accel-
eration policy is due to the reward signal. The agent
receives a reward of 100 when it reaches the top, and
the backward policy reaches the top only as part of
DWN not individually.
Combining the gained insights from the above
results, we demonstrate that DWN performs as ex-
pected: the agent is capable of reaching the end objec-
tive, while also maximise the reward collected by the
individual policies within the DWN agent. In other
words, policies in DWN are selected in such a way
that on an individual level each policy can achieve
its best performance, i.e., maximise its long-term re-
wards. An added benefit is that the agent can also
reach the main objective, i.e., reach the top of the hill.
Deep W-Networks: Solving Multi-Objective Optimisation Problems with Deep Reinforcement Learning
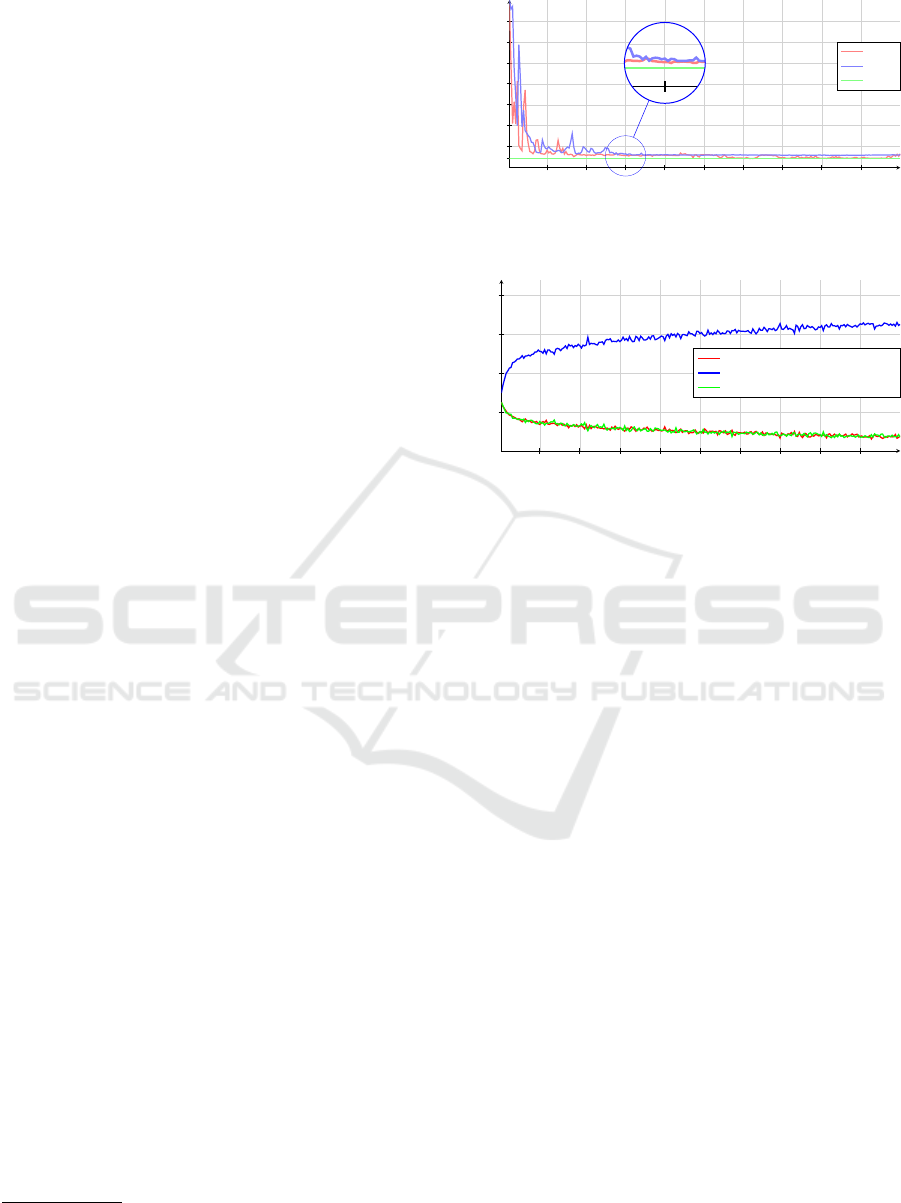
23

1000 2000 3000 4000 5000
−20
−10
Episode number
Averaged over 50 episodes
(a) Time penalty collected
DWN
DQN Time DQN Treasure DQN
1000 2000 3000 4000 5000
10
20
30
40
50
Episode number
Average over 50 episodes
(b) Treasure Collected
Figure 5: Time penalty and treasure collected, averaged
over 50 episodes, for the number of episodes.
4.2 Deep Sea Treasure
The second environment, called Deep Sea Treasure,
is a simple grid-world with treasure chests that in-
crease in value the deeper they are. The deeper the
chest is, the further away from the agent it is. The
goal of this scenario is for the agent to learn to opti-
mise for future rewards rather than opting for the frac-
tional short-term gain. We used the environment as
proposed and implemented in (Vamplew et al., 2011).
The deep sea environment has two objectives:
time penalty and collected treasure. The time objec-
tive is for the agent to finish the episode, i.e., find the
treasure, as quickly as possible. Therefore, the agent
receives a negative reward of -1 at every step. The
treasure reward depends on how deep is the treasure.
Furthermore, the reward is increasing non-linearly
with the depth and ranges from 1 to 124. In this sce-
nario, our DWN agent has two policies: time and trea-
sure. As in the previous environment, all ANN, i.e.,
θ
Q
i
,
ˆ
θ
Q
i
,θ
W
i
,
ˆ
θ
W
i
∀i, have the same Convolutional Neu-
ral Network (CNN) structure. The first 2-dimensional
convolution layer has three input channels and 16 out-
put channels, and the second and third convolution
layers have 32 channels. Every convolution layer has
kernel size five with stride two, followed by batch nor-
malisation. The last dense layer in the ANN has 1568
neurons. We list hyper-parameters in Table 2.
First, we analyse the performance of individual
policies and compare it with DWN. For the individ-
ual policy, we employed DQN with the same neural
-15 -10 -5 0
25
50
75
100
125
Time cost
Treasure value
Pareto front
DQN
Time DQN
Treasure DQN
DWN without Pre-training
DWN with Pre-training
Figure 6: The Pareto front for the deep sea treasure environ-
ment.
structure as described above. In Fig. 5 we show the
performance of three DQN solutions, each with dif-
ferent reward signal. The first DQN solution receives
only the time penalty reward signal, the second only
the treasure value signal, and the third the sum of the
two reward signals. The DQN with only time reward
learns to finish the episodes as fast as possible. There-
fore, it learns to collect the first available treasure.
The DQN with only treasure reward learns to collect
the highest treasure reward of all approaches. How-
ever, it does not learn to collect the highest treasure
rewards, i.e., 74 and 124. The performance of DQN
with the sum of two rewards is exactly in the middle
of the two. Interestingly, the DWN performance is be-
tween the DQN with the sum reward and DQN with
only time reward.
In Fig. 6 we show how close to the Pareto front
the agent with a different approach can arrive after
5000 episodes. Note that results are the average of
the last one hundred episodes. The DQN learns to
reach the Pareto front. However, the collected trea-
sure reward is far from ideal. The DWN, when trained
from scratch, is close but under-performs in compari-
son to a DQN approach. Interestingly, DWN with pre-
trained Q-networks finds a high treasure at the Pareto
front. In the latter approach, we took advantage of
DWN modularity properties. First, we trained time
and treasure policy for 2500 episodes separately, and
then for 2500 episodes, we trained as part of DWN.
Such a behaviour can be explained that policies as part
of DWN are not able to converge, thus giving them a
head start, i.e., learning separately, can improve the
DWN performance. Furthermore, such a result was
expected because, as it was pointed out in the origi-
nal W-learning paper, we need to allow the Q-learning
networks to learn first.
5 CONCLUSION
In this paper, we have proposed a deep learning ex-
tension to W-learning, an approach that naturally re-
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
24

Table 2: Hyperparameters for the Deep Sea Environment.
Hyperparameter Value Hyperparameter Value Hyperparameter Value
γ 0.9 α
1 ∗ 10
−3
β 0.4
ε
Q
start
0.95
ε
Q
decay
0.995
ε
Q
min
0.25
ε
W
start
0.99
ε
W
decay
0.9995
ε
W
min
0.01
ζ 0.6
τ
Q
1 ∗ 10
−3
τ
W
1 ∗ 10
−3
Batch size K 1024 Memory size M
1 ∗ 10
5
Q Optimizer RMSprop
W Optimizer RMSprop Q learning rate
1 ∗ 10
−3
W learning rate
1 ∗ 10
−3
solves competition in multi-objective scenarios. We
have demonstrated the proposed method’s efficiency
and superiority to a baseline solution in two environ-
ments: deep sea treasure and multi-objective moun-
tain car. In both of these environments, the proposed
DWN is capable of finding the Pareto front. Fur-
thermore, we have also demonstrated the advantage
of DWN modularity properties by showing that us-
ing a pre-trained policy can aid in finding the Pareto
front in the deep sea treasure environment. In our fu-
ture work, we will focus on improving the compu-
tational performance and evaluating the performance
in more complex environments, e.g., SuperMario-
Bros (Kauten, 2018).
The proposed DWN algorithm can be employed
in any system with multiple objectives such as traf-
fic control, telecommunication networks, finance, etc.
The condition being that each objective is represented
with a different reward function. The main advantage
of DWN is its ability to train multiple policies simul-
taneously. Furthermore, sharing the state space be-
tween policies is not mandatory, e.g., a policy for the
mountain car environment policies could only need
access to the velocity vector. Meaning that with DWN
it is possible to train policies with different states due
to the use of separate buffers for storing experiences.
ACKNOWLEDGEMENTS
This work was funded in part by the SFI-NSFC Part-
nership Programme Grant Number 17/NSFC/5224
and SFI under Frontiers for the Future project
21/FFP-A/8957.
REFERENCES
Abels, A., Roijers, D., Lenaerts, T., Now
´
e, A., and Steck-
elmacher, D. (2019). Dynamic weights in multi-
objective deep reinforcement learning. In Interna-
tional Conference on Machine Learning, pages 11–20.
PMLR.
Cardozo, N. and Dusparic, I. (2020). Learning run-time
compositions of interacting adaptations. SEAMS ’20,
page 108–114, New York, NY, USA. Association for
Computing Machinery.
Dusparic, I., Taylor, A., Marinescu, A., Cahill, V., and
Clarke, S. (2015). Maximizing renewable energy use
with decentralized residential demand response. In
2015 IEEE First International Smart Cities Confer-
ence (ISC2), pages 1–6.
Giupponi, L., Agusti, R., P
´
erez-Romero, J., and Sallent,
O. (2005). A novel joint radio resource manage-
ment approach with reinforcement learning mecha-
nisms. In IEEE International Performance, Comput-
ing, and Communications Conference (IPCCC), pages
621–626. Phoenix, AZ, USA.
Hribar, J., Marinescu, A., Chiumento, A., and DaSilva,
L. A. (2022). Energy Aware Deep Reinforce-
ment Learning Scheduling for Sensors Correlated in
Time and Space. IEEE Internet of Things Journal,
9(9):6732–6744.
Humphrys, M. (1995). W-learning: Competition among
selfish Q-learners.
Jin, Y. and Sendhoff, B. (2008). Pareto-Based Multiobjec-
tive Machine Learning: An Overview and Case Stud-
ies. IEEE Transactions on Systems, Man, and Cyber-
netics, Part C (Applications and Reviews), 38(3):397–
415.
Karlsson, J. (1997). Learning to solve multiple goals. Uni-
versity of Rochester.
Kauten, C. (2018). Super Mario Bros for OpenAI Gym.
GitHub: github.com/Kautenja/gym-super-mario-bros.
Kusic, K., Ivanjko, E., Vrbanic, F., Greguric, M., and Dus-
paric, I. (2021). Spatial-temporal traffic flow control
on motorways using distributed multi-agent reinforce-
ment learning. Mathematics - Special Issue Advances
in Artificial Intelligence: Models, Optimization, and
Machine Learning, 9(23).
LeCun, Y., Bengio, Y., and Hinton, G. (2015). Deep learn-
ing. nature, 521(7553):436–444.
Liu, C., Xu, X., and Hu, D. (2015). Multiobjective Re-
inforcement Learning: A Comprehensive Overview.
IEEE Transactions on Systems, Man, and Cybernet-
ics: Systems, 45(3):385–398.
Mnih, V., Kavukcuoglu, K., Silver, D., Graves, A.,
Antonoglou, I., Wierstra, D., and Riedmiller, M.
(2013). Playing Atari With Deep Reinforcement
Learning. arXiv preprint arXiv:1312.5602.
Deep W-Networks: Solving Multi-Objective Optimisation Problems with Deep Reinforcement Learning
25

Mossalam, H., Assael, Y. M., Roijers, D. M., and White-
son, S. (2016). Multi-Objective Deep Reinforcement
Learning. arXiv preprint arXiv:1610.02707.
Nguyen, T. T., Nguyen, N. D., Vamplew, P., Nahavandi, S.,
Dazeley, R., and Lim, C. P. (2020). A multi-objective
deep reinforcement learning framework. Engineering
Applications of Artificial Intelligence, 96:103915.
Schaul, T., Quan, J., Antonoglou, I., and Silver, D.
(2015). Prioritized experience replay. Presented
at International Conference on Learning Representa-
tions (ICLR), San Diego, CA, May 7–9, 2015. arXiv
preprint 1511.05952.
Sprague, N. and Ballard, D. (2003). Multiple-goal rein-
forcement learning with modular sarsa(0). In 18th Int.
Joint Conf. Artif. Intell., page 1445–1447.
Tajmajer, T. (2018). Modular multi-objective deep rein-
forcement learning with decision values. In 2018 Fed-
erated conference on computer science and informa-
tion systems (FedCSIS), pages 85–93. IEEE.
Vamplew, P., Dazeley, R., Berry, A., Issabekov, R., and
Dekker, E. (2011). Empirical evaluation methods
for multiobjective reinforcement learning algorithms.
Machine learning, 84(1):51–80.
Wan, R., Zhang, X., and Song, R. (2020). Multi-objective
reinforcement learning for infectious disease control
with application to COVID-19 spread. arXiv preprint
arXiv:2009.04607.
Wang, Z., Schaul, T., Hessel, M., Hasselt, H., Lanctot, M.,
and Freitas, N. (2016). Dueling network architectures
for deep reinforcement learning. In Proceedings of
Machine Learning Research (PMLR), vol.48, pages
1995–2003. New York, USA.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
26
