
False Negative Reduction in Semantic Segmentation Under Domain Shift
Using Depth Estimation
Kira Maag
1
and Matthias Rottmann
2,3
1
Ruhr University Bochum, Germany
2
University of Wuppertal, Germany
3
EPFL, Switzerland
Keywords:
Deep Learning, Semantic Segmentation, Domain Generalization, Depth Estimation.
Abstract:
State-of-the-Art deep neural networks demonstrate outstanding performance in semantic segmentation. How-
ever, their performance is tied to the domain represented by the training data. Open world scenarios cause
inaccurate predictions which is hazardous in safety relevant applications like automated driving. In this work,
we enhance semantic segmentation predictions using monocular depth estimation to improve segmentation by
reducing the occurrence of non-detected objects in presence of domain shift. To this end, we infer a depth
heatmap via a modified segmentation network which generates foreground-background masks, operating in
parallel to a given semantic segmentation network. Both segmentation masks are aggregated with a focus on
foreground classes (here road users) to reduce false negatives. To also reduce the occurrence of false positives,
we apply a pruning based on uncertainty estimates. Our approach is modular in a sense that it post-processes
the output of any semantic segmentation network. In our experiments, we observe less non-detected objects
of most important classes and an enhanced generalization to other domains compared to the basic semantic
segmentation prediction.
1 INTRODUCTION
Semantic image segmentation aims at segmenting ob-
jects in an image by assigning each pixel to a class
within a predefined set of semantic classes. Thereby,
semantic segmentation provides comprehensive and
precise information about the given scene. This is
particularly desirable in safety relevant applications
like automated driving. In recent years, deep neu-
ral networks (DNNs) have demonstrated outstanding
performance on this task (Chen et al., 2018; Wang
et al., 2021a). However, DNNs are usually trained
on a specific dataset (source domain) and often fail to
function properly on unseen data (target domain) due
to a domain gap. In real-world applications, domain
gaps may occur due to shifts in location, time and
other environmental parameters. This causes domain
shift on both, foreground classes – countable objects
such as persons, animals, vehicles – and background
classes – regions with similar texture or material like
sky, road, nature, buildings (Adelson, 2001). Figure 1
gives an example for the lack of generalization, i.e.,
the DNN is trained on street scenes in German cities
(Cordts et al., 2016) resulting in defective behavior
Figure 1: Example image of the India Driving dataset. Left:
Ground truth pixels of classes humans/animals colored in
red and vehicles in blue. Right: Semantic segmentation for
the mentioned classes.
on the unseen India road scenes (Varma et al., 2019)
where the animals are predicted as person, nature or
fence. This is critical since potential hazardous sit-
uations are underestimated due to the prediction of
non-dynamic classes. On the one hand, when us-
ing semantic segmentation in open world scenarios,
the appearance of objects that do not belong to any
of the semantic classes the DNN has been trained on
(like animals) may cause defective predictions (Ping-
gera et al., 2016). On the other hand, even objects of
known classes can change their appearance, leading to
erroneous predictions. Hence, for the deployment of
DNNs in safety-critical applications, robustness un-
der domain shifts is essential.
Maag, K. and Rottmann, M.
False Negative Reduction in Semantic Segmentation Under Domain Shift Using Depth Estimation.
DOI: 10.5220/0011607400003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 5: VISAPP, pages
397-408
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
397

Unsupervised domain adaptation is an approach
overcoming this issue. The idea is to train a DNN on
labeled source domain data and jointly on unlabeled
target data adapting the source domain distribution to
the target one (Watanabe et al., 2018). As target data
is not always available for training, the recent research
has also been devoted to domain generalization re-
solving this limitation (Lee et al., 2022).
In this work, we introduce a domain generaliza-
tion method for semantic segmentation using depth
estimation focusing on the reduction of false negative
foreground objects. In applications like automated
driving, the foreground class is of particular interest
due to its dynamical behavior. Especially in pres-
ence of domain gaps, the detection performance w.r.t.
these object classes can decrease significantly. An
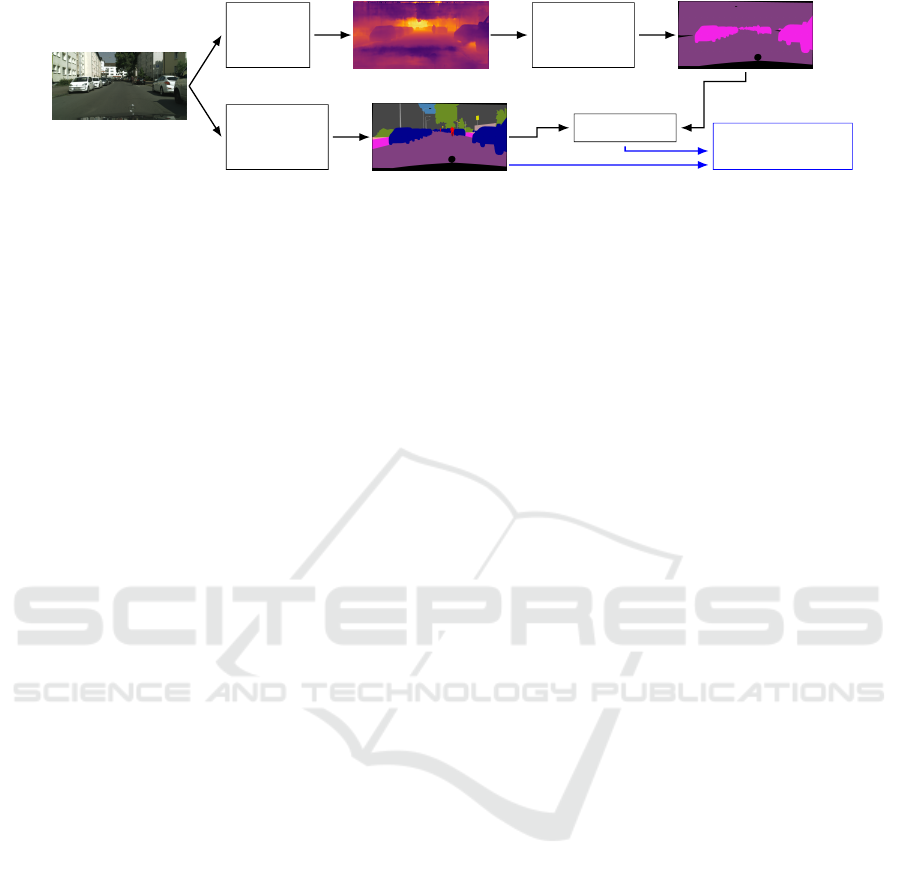
overview of our approach consisting of two branches
(running in parallel) is shown in Figure 2. The im-
age segmentation branch is a semantic segmentation
inference and the depth segmentation branch feeds
the same RGB input image into a depth estimation
network. The goal of depth estimation is to obtain
a representation of the spatial structure of a given
scene, which can help to bridge domain gaps (Wang
et al., 2021b). The resulting depth heatmap is passed
to a modified segmentation network which predicts
foreground-background segmentation. The architec-
ture of this network may be based on the architec-
ture of the semantic segmentation network, but can be
chosen independently. In the fusion step, the semantic
segmentation and the foreground-background predic-
tion are aggregated obtaining several segments (con-
nected components of pixels belonging to the same
class) per foreground class. As a result of combin-
ing the two masks, we detect overlooked segments
of the basic semantic segmentation network on the
source dataset as well as under domain shift using the
depth information for domain generalization. How-
ever, the increased sensitivity towards finding fore-
ground objects may result in an overproduction of
false positive segments. To overcome this, we uti-
lize an uncertainty-aware post-processing fusion step,
a so-called meta classifier which performs false pos-
itive pruning with a lightweight classifier (Rottmann
et al., 2020; Maag et al., 2020). Moreover, to gain a
further performance boost, the meta classifier, which
is trained only on the source domain, can be fine-
tuned on a small amount of the respective target do-
main (lightweight domain adaptation).
We only assume input data as well as a trained se-
mantic segmentation and a depth estimation network.
Due to the modularity of our method, we can set up
our model based on these assumptions and it is appli-
cable to any semantic segmentation network i.e., only
the output is post-processed. In our tests, we em-
ploy two semantic segmentation (Chen et al., 2018;
Zhang et al., 2019) and two depth estimation net-
works (Godard et al., 2019; Lee et al., 2019) applied
to four datasets, i.e., Cityscapes (Cordts et al., 2016)
as source domain and A2D2 (Geyer et al., 2020), Lo-
stAndFound (Pinggera et al., 2016) as well as India
Driving (Varma et al., 2019) as target domains. The
application of these widely differing datasets is in-
tended to demonstrate the domain generalization and
error reduction capability of our approach. The source
code is publicly available at http://github.com/kmaag/
FN-Reduction-using-Depth. Our contributions are
summarized as follows:
• We introduce a modified segmentation network
which is fed with depth heatmaps and out-
puts foreground-background segmentation masks
which are combined with semantic segmentation
masks to detect possible overlooked segments (by
the semantic segmentation network) of the most
important classes. In addition, we perform meta
classification to prune false positive segments in
an uncertainty-aware fashion.
• For the first time, we demonstrate that incorpo-
rating depth information in a post-processing step
improves a semantic segmentation performance
(independently of the choice of semantic segmen-
tation network). We compare the performance of
our method with basic semantic segmentation per-
formance on several datasets (with domain gap)
obtaining area under precision-recall curve values
of up to 97.08% on source domain and 93.83%
under domain shift.
The paper is structured as follows. In section 2,
we discuss the related work. Our approach is intro-
duced in section 3 including the modified segmenta-
tion network, the aggregation of network predictions
and meta classification. The numerical results are
shown in section 4.
2 RELATED WORK
In this section, we first discuss related methods im-
proving robustness of DNNs under domain shift as
well as false negative reduction approaches. There-
after, we present works that use depth information to
enhance semantic segmentation prediction.
Robustness Under Domain Shift. Unsupervised
domain adaptation is often used to strengthen the ro-
bustness of DNNs bridging domain gaps (Watanabe
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
398
RGB input image
depth
estimation
network
modified
segmentation
network
semantic
segmentation
network
aggregation
meta classification
+ evaluation
Figure 2: Overview of our method. The input image is fed into a semantic segmentation network (bottom branch) and in
parallel into a depth estimation network (top branch). The resulting depth heatmap is passed to our modified segmentation
network which predicts a foreground-background segmentation. This prediction is aggregated with the semantic segmentation
and finally, meta classification is applied to reduce false positive segments in an uncertainty-aware manner.
et al., 2018). The DNN is trained with source data (la-
beled) and target data (unlabeled and different from
source dataset) to align the target domain’s distribu-
tions. In (Yan et al., 2019), this problem is tackled
by a generative adversarial network which translates
the target domain into the source domain before pre-
dicting semantic segmentation. Monocular depth es-
timation is used in (Cardace et al., 2022; Wang et al.,
2021b) to improve the prediction performance under
domain shift. However, target data from various en-
vironments is not always available during the train-
ing process. To overcome this limitation, research on
domain generalization has recently gained attention,
using only source data to train the model.
Synthetic to real domain generalization offers a
possibility to exploit the advantage of the availabil-
ity of synthetic data. In (Chen et al., 2020), the syn-
thetically trained network is encouraged to maintain
similar representations as the ImageNet pre-trained
model. In other works, style-diversified samples
(Zhao et al., 2022) or web-crawled images (Kim et al.,
2021) are utilized for improving the representational
consistency between synthetic and real-world for the
sake of generalizable semantic segmentation. The
model presented in (Shiau et al., 2021) is trained on
multiple source domains (synthetic and real) to gener-
alize to unseen data domains. The variety of contents
and styles from ImageNet is leveraged in (Lee et al.,
2022) to learn domain-generalized semantic features.
In (Choi et al., 2021), an instance selective whitening
loss is introduced to disentangle the domain-specific
style and domain-invariant content to remove only the
style information causing domain shift.
In contrast to domain adaptation and generaliza-
tion, our method does not require target domain data
or a great amount of source domain data for training,
we only consider depth information for domain gen-
eralization. Moreover, we do not modify the training
process of the semantic segmentation network, i.e.,
we are independent of the network due to modularity.
For these reasons, the presented approaches cannot be
considered as suitable baselines.
False Negative Reduction in Semantic Segmen-
tation. Reducing false negatives, i.e., obtaining a
higher recall rate, is often achieved in semantic seg-
mentation by modifying the loss function. In (Xiang
et al., 2019), a higher recall rate for a real-time DNN
is obtained by modifying the loss function, classifier
and decision rule. A similar approach presented in
(Xiang et al., 2019) considers an importance-aware
loss function to improve a network’s reliability. To re-
duce false negative segments of minority classes, dif-
ferences between the Bayes and the Maximum Like-
lihood decision rule are exploited introducing class
priors that assign larger weight to underrepresented
classes (Chan et al., 2020). Since minority classes are
not necessarily hard to predict, leading to the predic-
tion of many false positives, a hard-class mining loss
is introduced in (Tian et al., 2021) by redesigning the
cross entropy loss to dynamically weight the loss for
each class based on instantaneous recall. In (Zhong
et al., 2021), false negative pixels in semi-supervised
semantic segmentation are reduced by using the pixel-
level ℓ
2
loss and the pixel contrastive loss.
While the presented approaches modify the train-
ing process and/or the decision rule, we post-process
only the output of the semantic segmentation net-
work. For the first time, we present a false negative re-
duction approach which overcomes domain gaps us-
ing depth information. The only work (Maag, 2021)
which also uses depth heatmaps addressing the recall
rate improvement works on video instance segmenta-
tion.
Improving Segmentation Using Depth Estimation.
The predictions of semantic segmentation and depth
estimation masks are improved in previous works us-
ing joint network architectures sharing information
for both tasks (Chen et al., 2019; Jiao et al., 2018).
Furthermore, approaches are introduced where infor-
mation of one task enhance the prediction quality of
the other task. The semantic segmentation task is im-
proved in (Hazirbas et al., 2016) by an encoder con-
False Negative Reduction in Semantic Segmentation Under Domain Shift Using Depth Estimation
399

sisting of two network branches which extract fea-
tures from depth and RGB images simultaneously.
In (Cao et al., 2017), RGB-D data is also fed into a
network that extracts both RGB and depth features
in parallel for semantic segmentation prediction (and
object detection). Contrary, a single shared encoder is
used in (Novosel, 2019) to enhance performance for
a supervised task, here semantic segmentation, which
obtains information of two self-supervised tasks (col-
orization and depth prediction) exploiting unlabeled
data. In (Jiang et al., 2018), a semantic segmentation
network is pre-trained for depth prediction to serve
as a powerful proxy for learning visual representa-
tions. In addition to learning features from depth in-
formation, a student-teacher framework is considered
in (Hoyer et al., 2021) to select the most helpful sam-
ples to annotate for semantic segmentation.
In comparison to the described methods mod-
ifying the network architecture, our foreground-
background prediction runs independently and in
parallel with semantic segmentation inference, and
the aggregation serves as lightweight post-processing
step. In particular, we cannot regard the presented ap-
proaches as suitable baselines since the domain gen-
eralization capability is not tested. However, these
methods demonstrate that depth information can be
used to enhance semantic segmentation.
3 METHOD DESCRIPTION
Our method is composed of two parallel branches,
i.e., the image segmentation and depth segmentation
branch, see Figure 2. The outputs of both streams are
aggregated to detect segments overlooked by the ba-
sic semantic segmentation network. As many false
positive segments can be generated by the fusion,
false positive pruning is applied in an additional post-
processing step.
3.1 Foreground-Background
Segmentation
In this section, we introduce our modified segmen-
tation network for foreground-background segmenta-
tion. We assume that a depth estimation (and a seman-
tic segmentation ground truth) is available for each in-
put image. Our approach is modular and independent
of the choice of the depth estimation (and the seman-
tic segmentation) network. The basis for the modified
network can be any standard semantic segmentation
network. However, instead of feeding an RGB im-
age into the network a depth estimation heatmap is
used and the semantic space is composed of only two
classes - foreground and background.
The binarization into foreground and background
is adapted from the thing and stuff decomposition in
the computer vision field like in panoptic segmenta-
tion (Kirillov et al., 2019). Using automated driving
as example application, things are countable objects
such as persons, animals, cars or bicycles. The stuff
classes consist of amorphous regions of similar tex-
ture or material such as sky, road, nature or buildings.
Note, the idea of things and stuff also exists in other
application areas like robot navigation.
3.2 Aggregation of Predictions
From the first branch, we obtain a semantic segmenta-
tion prediction, i.e., a pixel-wise classification of im-
age content. The DNN provides for each pixel z a
probability distribution f
z
(y|x) over a prescribed label
space y ∈ C = {y
1
,.. .,y
c
} with c different class la-
bels, given an input image x. The predicted class for
each pixel z is computed by the maximum a-posteriori
principle
ˆy
z
(x) = arg max
y∈C
f
z
(y|x). (1)
The second branch provides a foreground-
background segmentation. Given the same input
image x, we obtain for each pixel z the probability of
being a foreground pixel g
z
(x) ∈ [0,1] considering
a binary classification problem. The predicted seg-
mentations are aggregated pixel-wise resulting in a
combined prediction with the class label background
y
0
or a foreground class label y ∈
˜
C ⊂ C per pixel.
For this, we split the label space into foreground
class labels
˜
C = {y
1
,... , y
˜c
}, ˜c < c, and background
class labels {y
˜c+1
,... , y
c
} with y
0
= C \
˜
C . The
combination is defined per pixel by
ˆs
z
(x) =
ˆy
z
(x), if ˆy
z
(x) ∈
˜
C
argmax
y∈
˜
C
f
z
(y|x), if g
z
(x) > 0.5 ∧ ˆy
z
(x) /∈
˜
C
y
0
, else .
(2)
If the semantic segmentation network predicts a fore-
ground class or the foreground-background network
predicts foreground, the pixel is considered as fore-
ground and assigned to the foreground class y ∈
˜
C
of the semantic segmentation with the highest prob-
ability. Otherwise, the pixel is assigned to the class
background. Moreover,
ˆ
S
x
= {ˆs
z
(x)|z ∈ x} denotes
the combined segmentation consisting of foreground
classes and the background class.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
400

3.3 Meta Classification
The combination of the semantic segmentation and
the foreground-background prediction can increase
the number of false positives. For this reason, we ap-
ply meta classification (Rottmann et al., 2020) as false
positive pruning step using uncertainty measures. The
degree of randomness in semantic segmentation pre-
diction f
z
(y|x) is quantified by (pixel-wise) dispersion
measures, like the entropy. To obtain segment-wise
features characterizing uncertainty of a given segment
from these pixel-wise dispersion measures, we aggre-
gate them over segments by average pooling. In addi-
tion, we hand-craft features based on object’s geom-
etry like the segment size or the geometric center ob-
taining uncertainty information. These hand-crafted
measures form a structured dataset where the rows
correspond to predicted segments and the columns to
features. A detailed description of these hand-crafted
features can be found in Appendix A.
To determine if a predicted segment is a false pos-
itive, i.e., has no overlap with a ground truth seg-
ment of a foreground class, we consider the intersec-
tion over union (IoU, (Jaccard, 1912)), a typical per-
formance measure of segmentation networks with re-
spect to the ground truth. Meta classification tackles
the task of classifying between IoU = 0 (false posi-
tive) and IoU > 0 (true positive) for all predicted seg-
ments. If a segment is predicted to be a false positive,
it is no longer considered as a foreground segment but
as background. We perform meta classification us-
ing our structured dataset as input. Note, these hand-
crafted measures are computed without the knowl-
edge of the ground truth data. To train the classifier,
we use gradient boosting (Friedman, 2002) that out-
performs linear models and shallow neural networks
as shown in (Maag et al., 2021). We study to which
extent our aggregated prediction followed by meta
classification improves the detection performance for
important classes compared to basic semantic seg-
mentation.
4 EXPERIMENTS
In this section, we first present the experimental set-
ting and then demonstrate the performance improve-
ments of our method compared to the basic semantic
segmentation network in terms of false negative re-
duction overcoming the domain gap.
4.1 Experimental Setting
Datasets. We perform our tests on four datasets
for semantic segmentation in street scenes consider-
ing Cityscapes (Cordts et al., 2016) as source do-
main and A2D2 (Geyer et al., 2020), LostAnd-
Found (Pinggera et al., 2016) as well as India Driv-
ing (IDD) (Varma et al., 2019) as target domains.
The training/validation split of Cityscapes consists of
2,975/500 images from dense urban traffic in 18/3 dif-
ferent German towns, respectively. Thus, our fore-
ground class consists of all road user classes, i.e., hu-
man (person and rider) and vehicle (car, truck, bus,
train, motorcycle and bicycle) and the background of
categories flat, construction, object, nature and sky.
From the A2D2 dataset, we sample 500 images out
of 23 image sequences for our tests covering urban,
highways and country roads in three cities. This vari-
ety of environments is not included in the Cityscapes
dataset resulting in a domain shift in the background.
The validation set of LostAndFound containing 1,203
images is designed for detecting small obstacles on
the road in front of the ego-car. This causes a fore-
ground domain shift as these objects are not contained
in the semantic space of Cityscapes. We use 538
frames of the IDD dataset which contains unstruc-
tured environments of Indian roads inducing a domain
shift in both, foreground and background. The latter
is caused by, for example, the diversity of ambient
conditions and ambiguous road boundaries. The fore-
ground domain shift occurs as the IDD dataset con-
sists of two more relevant foreground classes (animals
and auto rickshaws) and the Cityscapes foreground
objects differ significantly.
Networks. We consider the state-of-the-art
DeepLabv3+ network (Chen et al., 2018) with
WideResNet38 (Wu et al., 2016) as backbone and
the more lightweight (and thus weaker) DualGCNet
(Zhang et al., 2019) with ResNet50 (He et al., 2016)
backbone for semantic segmentation. Both DNNs
are trained on the Cityscapes dataset achieving mean
IoU (mIoU) values of 90.29% for DeepLabv3+
and 79.68% for DualGCNet on the Cityscapes
validation set. For depth estimation trained on the
KITTI dataset (Geiger et al., 2013), we use the
supervised depth estimation network BTS (Lee
et al., 2019) with DenseNet-161 (Huang et al., 2017)
backbone obtaining a relative absolute error on the
KITTI validation set of 0.090 and the unsupervised
Monodepth2 (Godard et al., 2019) with ResNet18
backbone achieving 0.106 relative absolute error.
Our modified segmentation network is based on
the DeepLabv3+ architecture with WideResNet38
False Negative Reduction in Semantic Segmentation Under Domain Shift Using Depth Estimation
401
backbone having high predictive power and is fed
with depth estimation heatmaps of the Cityscapes
dataset predicted by the BTS network and Mon-
odepth2, respectively. We train this network on the
training split of the Cityscapes dataset and use the
binarized (into foreground and background) semantic
segmentation ground truth to compare our results
with the basic semantic segmentation network which
is also trained on Cityscapes. For the BTS network
a validation mIoU of 88.34% is obtained and for
Monodepth2 of 85.12%.
Evaluation Metrics. Meta classification provides
a probability of observing a false positive seg-
ment and such a predicted false positive segment
is considered as background. We threshold on
this probability with 101 different values h ∈ H =
{0.00,0.01,... , 0.99,1.00}. For each threshold, we
calculate the number of true positive, false posi-
tive and false negative foreground segments result-
ing in precision (prec(h)) and recall (rec(h)) val-
ues on segment-level depended of h. The degree
of separability is then computed as the area under
precision recall curve (AUPRC) by thresholding the
meta classification probability. In addition, we com-
pute the recall rate at 80% precision rate (REC
80
)
for the evaluation. Furthermore, we consider the
segment-wise F
1
score which is defined by F
1
(h) =
2 · prec(h) · rec(h)/(prec(h) + rec(h)). To obtain an
evaluation metric independent of the meta classifica-
tion threshold h, we calculate the averaged F
1
score
¯
F
1
=
1
|H|
∑
h∈H
F
1
(h) and the optimal F
1
score F
∗
1
=
max
h∈H
F
1
(h). For a detailed description of these
metrics see Appendix B.
4.2 Numerical Results
Results on the Source Domain. First, we study the
predictive power of the meta classifier trained on the
Cityscapes (validation) dataset using a train/test split-
ting of 80%/20% shuffling 5 times, such that all seg-
ments are a part of the test set. We use meta classi-
fication to prune possible false positive segments that
are falsely predicted as foreground segments. For the
comparison of basic semantic segmentation perfor-
mance with our approach, meta classifiers are trained
on the predicted foreground segments, respectively.
These classifiers achieve test classification AUROC
values between 94.68% and 99.14%. The AUROC
(area under receiver operating characteristic curve) is
obtained by varying the decision threshold in a binary
classification problem, here for the decision between
IoU = 0 and > 0. The influence of meta classification
on the performance is studied in Appendix C.
Table 1: Performance results for the Cityscapes dataset
for the basic semantic segmentation prediction vs. our ap-
proach, i.e., the DeepLabv3+/DualGCNet prediction aggre-
gated with foreground-background prediction using BTS or
Monodepth2.
AUPRC
¯
F
1
F
∗
1
REC
80
DeepLabv3+ 94.26 90.61 94.69 94.49
+ BTS 97.07 90.21 95.80 97.15
+ Monodepth2 97.08 90.03 95.73 97.15
DualGCNet 91.85 88.68 92.77 92.18
+ BTS 95.90 87.92 94.66 95.88
+ Monodepth2 95.63 87.94 94.58 95.66
Table 2: mIoU results for both semantic segmentation net-
works and the difference to our approach. A higher mIoU
value corresponds to better performance.
Cityscapes A2D2 IDD
DeepLabv3+ 90.29% 61.98% 57.26%
+ BTS −4.72 pp −2.87 pp −1.59 pp
+ Monodepth2 −5.97 pp −4.84 pp −3.99 pp
DualGCNet 79.68% 23.76% 45.79%
+ BTS −3.99 pp +0.12 pp −1.03 pp
+ Monodepth2 −5.09 pp −0.49 pp −3.12 pp
We compare the detection performances which are
shown in Table 1 using presented evaluation metrics.
We observe that our method obtain higher AUPRC,
F
∗
1
and REC
80
values than the semantic segmentation
prediction. Note, there is no consistency on which
depth estimation network yields more enhancement.
In particular, we reduce the number of non-detected
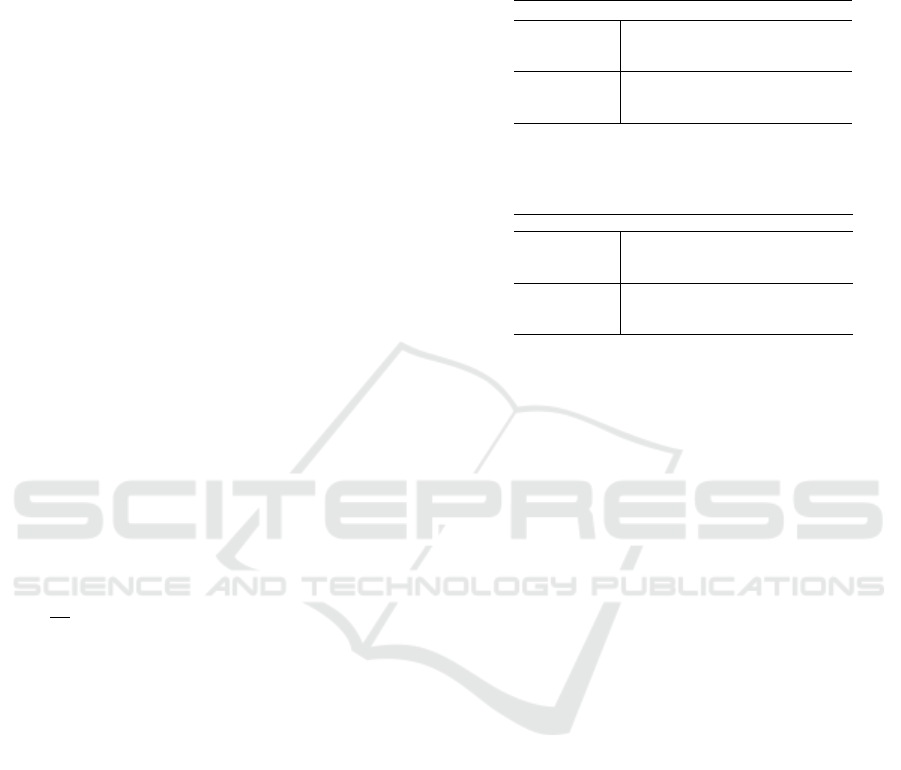
segments of foreground classes. In Figure 3 (left),
the highest recall values of the semantic segmentation
predictions are shown, i.e., no segments are deleted
using meta classification. For our method, we use
the meta classification threshold where the precision
of our method is equal to that of the baseline. As a
consequence, for the identical precision values we ob-
verse an increase in recall by up to 2.71 percent points
(pp) for the Cityscapes dataset. In Appendix D, more
numerical results evaluated on individual foreground
classes are presented.
The mIoU is the commonly used performance
measure for semantic segmentation. To compute the
mIoU for the aggregated prediction
ˆ
S
x
, we have to fill
the background values as they are ignored up to now.
Similar to how we obtain the foreground class dur-
ing the combination, we assign to every background
pixel the background class y ∈ C \
˜
C of the semantic
segmentation with the highest probability. The results
for semantic segmentation prediction and the differ-
ence to our aggregated predictions are shown in the
Cityscapes column of Table 2. We perform slightly
worse in the overall performance accuracy (mIoU) as
the foreground-background masks are location-wise
less accurate than the segmentation masks, see Fig-
ure 4. The reason is that the modified segmentation
network is fed with predicted depth heatmaps which
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
402
Figure 3: Left: The recall values under the assumption of same precision values for all datasets and networks. We distinguish
the performance for the DeepLabv3+ (DL) and the DualGCNet (DG) semantic segmentation networks whose predictions
serve as baselines. We compare these with our approach using the BTS and the Monodepth2 depth estimation network,
respectively. Center: Precision-recall curves for the A2D2 dataset, the DeepLabv3+ and BTS networks. Right: Number of
false positive vs. false negative segments for different meta classification thresholds for the IDD dataset, the DualGCNet and
BTS networks using 20% of this dataset for fine-tuning.
may be inaccurate resulting in less precise separation
of foreground and background. Nonetheless, we de-
tect foreground objects, here road users, that are over-
looked by the semantic segmentation network (for ex-
ample, see the bicycle in Figure 4 (left)).
Results Under Domain Shift. In this section, we
study the false negative reduction for the A2D2, Lo-
stAndFound and IDD datasets under domain shift
from the source domain Cityscapes. As mentioned
above, since the semantic segmentation networks
as well as the modified segmentation networks are
trained on the Cityscapes dataset, we train also the
meta classification model on this dataset using all pre-
dicted segments. We obtain meta classification test
AUROC values up to 93.12% for A2D2, 91.65% for
LostAndFound and 93.97% for IDD.
We compare the performance of our approach
with the semantic segmentation prediction by com-
puting the evaluation metrics, results are given in Ta-
ble 3. The performance metrics are greatly increased
by our method demonstrating that our approach is
more robust to domain shift. Noteworthy, we outper-
form the stronger DeepLabv3+ network in all cases.
Example curves are presented in Figure 3 (center) for
the A2D2 dataset where an AUPRC enhancement of
11.45 pp is obtained. Our precision-recall curve is
entirely above the baseline. In particular, for identical
precision values, we obtain an increase in recall by
up to 13.24 pp, i.e., reduce the number of false neg-
ative segments, as also shown in Figure 3 (left). Ex-
amples for detected segments that are missed by the
semantic segmentation network are given in Figure 4
for all datasets. Hence, our method detect segments
of well-trained classes, i.e., the overlooked bicycle in
the Cityscapes dataset or various cars in A2D2. More-
over, we bridge the domain gap as we find small ob-
stacles (LostAndFound) and animals (IDD) that are
not part of the Cityscapes dataset and thus, are not
included in the semantic space for training. In Ap-
pendix D, more numerical results evaluated on indi-
vidual foreground classes are presented.
In Table 2, the differences between the mIoU val-
ues are evaluated on the Cityscapes classes. For
the A2D2 dataset, the classes are mapped to the
Cityscapes ones and for the IDD dataset, we treat the
additional classes animal as human and auto rickshaw
as car. For the LostAndFound, an evaluation is not
possible as it contains only labels for the road and
the small obstacles which do not fit into the semantic
space. With one positive exception, we are slightly
worse in overall accuracy performance. On the one
hand, the images in Figure 4 demonstrate why we de-
crease the accuracy slightly as the predictions and in
particular, the segment boundaries are less accurate.
On the other hand, these images motivate the benefit
of our method as completely overlooked segments are
detected. Furthermore, we bridge the domain shift in
a post-processing manner that only requires two more
inferences which run in parallel to semantic segmen-
tation prediction.
Fine-Tuning of the Meta Classifier. Up to now,
we have trained the segmentation networks as well as
the meta classifier on Cityscapes for the experiments
on A2D2, LostAndFound and IDD dataset. In this
paragraph, we investigate the predictive power of the
meta classifier and the implications on false negative
reduction using parts of the target dataset for fine-
tuning. Note, this domain adaptation only occurs in
the post-processing meta classification step (retrain-
ing the neural networks is not necessary) and thus, the
fine-tuning is lightweight and requires only a small
amount of ground truth data. In detail, we retrain the
meta classifier with 20%, 40%, 60% and 80% of the
target dataset, respectively. The corresponding per-
False Negative Reduction in Semantic Segmentation Under Domain Shift Using Depth Estimation
403

Figure 4: Examples for segments that are overlooked by the basic semantic segmentation network and detected by our ap-
proach for Cityscapes (DualGCNet, BTS, left), A2D2 (DeepLabv3+, BTS, center left), LostAndFound (DeepLabv3+, Mon-
odepth2, center right) and IDD dataset (DeepLabv3+, BTS, right). Top: Ground truth images including only the labels of
foreground classes. Bottom: Basic semantic segmentation prediction in typical Cityscapes colors for foreground segments
(shades of blue and red) as well as the foreground prediction of our modified segmentation network (cyan).
Table 3: Performance results for the basic semantic segmentation prediction vs. our approach.
A2D2 LostAndFound IDD
AUPRC
¯
F
1
F
∗
1
REC
80
AUPRC
¯
F
1
F
∗
1
REC
80
AUPRC
¯
F
1
F
∗
1
REC
80
DeepLabv3+ 68.74 52.72 76.36 70.80 40.05 50.27 53.06 39.40 84.11 69.19 87.79 88.52
+ BTS 80.19 66.96 80.46 77.17 46.18 51.08 57.80 45.06 93.86 78.48 91.75 93.26
+ Monodepth2 80.01 66.77 80.72 77.15 51.67 54.15 60.41 48.07 93.35 76.69 91.45 92.86
DualGCNet 48.64 27.93 65.48 58.67 36.80 45.85 50.21 36.08 84.59 66.40 87.37 88.20
+ BTS 42.16 36.27 51.22 26.90 42.34 47.27 53.59 40.12 92.23 71.85 89.78 92.53
+ Monodepth2 49.03 39.01 57.26 19.29 47.92 49.11 57.06 44.16 92.39 73.17 89.82 92.23
Table 4: Evaluation results obtained by different splittings that are used for fine-tuning the meta classifier.
A2D2 LostAndFound IDD
AUPRC
¯
F
1
F
∗
1
REC
80
AUPRC
¯
F
1
F
∗
1
REC
80
AUPRC
¯
F
1
F
∗
1
REC
80
0% 80.19 66.96 80.46 77.17 46.18 51.08 57.80 45.06 93.86 78.48 91.75 93.26
DeepLabv3+ 20% 83.65 75.90 85.13 82.01 48.79 60.30 63.57 48.92 94.65 82.12 93.24 93.85
+ 40% 83.72 76.03 85.25 82.25 49.01 60.89 64.01 49.04 94.66 82.24 93.46 93.79
BTS 60% 83.75 75.99 85.39 82.05 49.11 61.41 64.67 49.16 94.86 82.19 93.43 93.89
80% 83.67 75.89 85.50 82.27 48.88 61.33 64.53 49.28 94.67 82.23 93.42 93.93
0% 80.01 66.77 80.72 77.15 51.67 54.15 60.41 48.07 93.35 76.69 91.45 92.86
DeepLabv3+ 20% 82.91 76.00 85.02 81.79 55.77 63.70 68.58 55.72 94.16 81.24 92.58 93.48
+ 40% 83.12 76.23 84.98 82.18 56.19 64.44 69.25 56.14 94.21 81.36 92.69 93.59
Monodepth2 60% 83.10 76.11 85.19 81.96 56.06 64.57 69.58 56.20 94.19 81.41 92.65 93.47
80% 83.03 75.94 85.15 81.68 56.11 64.50 69.65 56.39 94.17 81.31 92.50 93.49
0% 42.16 36.27 51.22 26.90 42.34 47.27 53.59 40.12 92.23 71.85 89.78 92.53
DualGCNet 20% 82.59 74.59 83.06 80.56 45.76 56.88 60.12 45.48 94.71 81.85 92.56 93.79
+ 40% 82.85 74.83 83.82 81.26 46.15 58.08 61.24 46.14 94.74 81.99 92.75 93.70
BTS 60% 82.82 74.72 83.58 81.20 46.19 58.15 61.26 46.39 94.71 81.85 92.73 93.77
80% 82.76 74.53 83.53 81.20 46.24 58.53 61.82 46.27 94.67 81.85 92.65 93.68
0% 49.03 39.01 57.26 19.29 47.92 49.11 57.06 44.16 92.39 73.17 89.82 92.23
DualGCNet 20% 81.98 74.66 83.26 80.69 53.14 61.26 65.97 53.01 94.27 81.56 91.93 93.31
+ 40% 82.27 74.97 83.28 81.02 53.77 62.30 66.95 53.61 94.39 81.60 92.02 93.51
Monodepth2 60% 82.31 75.14 83.34 81.35 53.91 62.48 67.17 53.80 94.40 81.64 92.32 93.31
80% 82.06 74.42 82.91 80.82 53.76 62.59 67.21 53.73 94.34 81.54 91.96 93.47
formance results are shown in Table 4.
We observe great enhancements even with only a
fine-tuning of 20% of the target domain obtaining an
increase of up to 40.43 pp for AUPRC. The maxi-
mal increase is achieved for the A2D2 dataset (on the
DualGCNet and BTS networks) for which 20% corre-
spond to about 100 images that are used for retraining
and achieving such an improvement. For all datasets,
the greatest performance gap occurs between a trained
meta classifier only on the Cityscapes dataset and us-
ing a small amount of the target domain data (here
20%). Increasing the subset of the target data, the
performance is only slightly enhanced. Using 20%
for fine-tuning, the highest AUPRC value of 94.71%
is obtained by the DualGCNet and the BTS network
on the IDD dataset. The corresponding number of
false positives and false negatives is given in Figure 3
(right). Note, the meta classifier for the baseline pre-
diction is trained on the same train splitting. We out-
perform the basic semantic segmentation prediction
and thus achieve a lower number of detection errors,
in particular false negatives, therefore bridging the
domain gap.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
404

5 CONCLUSION
In this work, we proposed a domain generalization
method applicable to any semantic segmentation net-
work using monocular depth estimation, in particu-
lar reducing non-detected segments. We inferred a
depth heatmap via a modified segmentation network
that predicts foreground-background masks in paral-
lel to a semantic segmentation network. Aggregat-
ing both predictions in an uncertainty-aware manner
with a focus on important classes, false negative seg-
ments were successfully reduced. Our experiments
suggest that also in a single-sensor setup, the informa-
tion about spatial structure from pre-trained monocu-
lar depth estimators can be utilized well to improve
the robustness of off-the-shelf segmentation networks
under domain shift in various settings.
ACKNOWLEDGEMENTS
We thank M. K. Neugebauer for support in data han-
dling and programming. This work is supported by
the Ministry of Culture and Science of the German
state of North Rhine-Westphalia as part of the KI-
Starter research funding program.
REFERENCES
Adelson, E. H. (2001). On seeing stuff: the perception of
materials by humans and machines. In IS&T/SPIE
Electronic Imaging. 1
Cao, Y., Shen, C., and Shen, H. T. (2017). Exploiting
depth from single monocular images for object detec-
tion and semantic segmentation. IEEE Transactions
on Image Processing. 4
Cardace, A., Luigi, L., Zama Ramirez, P., Salti, S., and
Di Stefano, L. (2022). Plugging self-supervised
monocular depth into unsupervised domain adaptation
for semantic segmentation. 3
Chan, R., Rottmann, M., H
¨
uger, F., Schlicht, P., and
Gottschalk, H. (2020). Metafusion: Controlled false-
negative reduction of minority classes in semantic seg-
mentation. IEEE International Joint Conference on
Neural Networks (IJCNN). 3
Chen, L.-C., Zhu, Y., Papandreou, G., Schroff, F., and
Adam, H. (2018). Encoder-decoder with atrous sep-
arable convolution for semantic image segmentation.
In European Conference on Computer Vision (ECCV).
1, 2, 5
Chen, P.-Y., Liu, A. H., Liu, Y.-C., and Wang, Y.-C. F.
(2019). Towards scene understanding: Unsupervised
monocular depth estimation with semantic-aware rep-
resentation. In IEEE/CVF Conference on Computer
Vision and Pattern Recognition (CVPR). 3
Chen, W., Yu, Z., Wang, Z., and Anandkumar, A. (2020).
Automated synthetic-to-real generalization. In Inter-
national Conference on Machine Learning (ICML). 3
Choi, S., Jung, S., Yun, H., Kim, J. T., Kim, S., et al.
(2021). Robustnet: Improving domain generalization
in urban-scene segmentation via instance selective
whitening. IEEE/CVF Conference on Computer Vi-
sion and Pattern Recognition (CVPR), pages 11575–
11585. 3
Cordts, M., Omran, M., Ramos, S., Rehfeld, T., Enzweiler,
M., et al. (2016). The cityscapes dataset for semantic
urban scene understanding. In IEEE Conference on
Computer Vision and Pattern Recognition (CVPR). 1,
2, 5, 12
Friedman, J. H. (2002). Stochastic gradient boosting. Com-
put. Stat. Data Anal. 5
Geiger, A., Lenz, P., Stiller, C., and Urtasun, R. (2013).
Vision meets robotics: The kitti dataset. The Interna-
tional Journal of Robotics Research. 5
Geyer, J., Kassahun, Y., Mahmudi, M., Ricou, X., Durgesh,
R., et al. (2020). A2D2: Audi Autonomous Driving
Dataset. 2, 5, 12
Godard, C., Mac Aodha, O., Firman, M., and Brostow, G. J.
(2019). Digging into self-supervised monocular depth
prediction. 2, 5
Hazirbas, C., Ma, L., Domokos, C., and Cremers, D.
(2016). Fusenet: Incorporating depth into semantic
segmentation via fusion-based cnn architecture. In
Asian Conference on Computer Vision (ACCV). 3
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. 5
Hoyer, L., Dai, D., Chen, Y., Koring, A., Saha, S., et al.
(2021). Three ways to improve semantic segmentation
with self-supervised depth estimation. 4
Huang, G., Liu, Z., and Weinberger, K. Q. (2017). Densely
connected convolutional networks. IEEE Conference
on Computer Vision and Pattern Recognition (CVPR).
5
Jaccard, P. (1912). The distribution of the flora in the alpine
zone. New Phytologist. 5
Jiang, H., Larsson, G., Maire, M., Shakhnarovich, G., and
Learned-Miller, E. G. (2018). Self-supervised relative
depth learning for urban scene understanding. In Eu-
ropean Conference on Computer Vision (ECCV). 4
Jiao, J., Cao, Y., Song, Y., and Lau, R. (2018). Look deeper
into depth: Monocular depth estimation with semantic
booster and attention-driven loss. In European Con-
ference on Computer Vision (ECCV). 3
Kim, N., Son, T., Lan, C., Zeng, W., and Kwak, S. (2021).
Wedge: Web-image assisted domain generalization
for semantic segmentation. 3
Kirillov, A., He, K., Girshick, R., Rother, C., and Dollar, P.
(2019). Panoptic segmentation. In IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition
(CVPR). 4
Lee, J. H., Han, M.-K., Ko, D. W., and Suh, I. H. (2019).
From big to small: Multi-scale local planar guidance
for monocular depth estimation. 2, 5
Lee, S., Seong, H., Lee, S., and Kim, E. (2022). Wildnet:
False Negative Reduction in Semantic Segmentation Under Domain Shift Using Depth Estimation
405

Learning domain generalized semantic segmentation
from the wild. 2, 3
Maag, K. (2021). False negative reduction in video instance
segmentation using uncertainty estimates. In IEEE In-
ternational Conference on Tools with Artificial Intel-
ligence (ICTAI). 3
Maag, K., Rottmann, M., and Gottschalk, H. (2020). Time-
dynamic estimates of the reliability of deep semantic
segmentation networks. In IEEE International Con-
ference on Tools with Artificial Intelligence (ICTAI).
2
Maag, K., Rottmann, M., Varghese, S., H
¨
uger, F., Schlicht,
P., et al. (2021). Improving video instance segmen-
tation by light-weight temporal uncertainty estimates.
In International Joint Conference on Neural Network
(IJCNN). 5
Novosel, J. (2019). Boosting semantic segmentation with
multi-task self-supervised learning for autonomous
driving applications. 4
Pinggera, P., Ramos, S., Gehrig, S., Franke, U., Rother, C.,
et al. (2016). Lost and found: detecting small road
hazards for self-driving vehicles. In IEEE/RSJ Inter-
national Conference on Intelligent Robots and Sys-
tems (IROS). 1, 2, 5
Rottmann, M., Colling, P., Hack, T., H
¨
uger, F., Schlicht, P.,
et al. (2020). Prediction error meta classification in
semantic segmentation: Detection via aggregated dis-
persion measures of softmax probabilities. In IEEE
International Joint Conference on Neural Networks
(IJCNN) 2020. 2, 5
Shiau, Z.-Y., Lin, W.-W., Lin, C.-S., and Wang, Y.-C. F.
(2021). Meta-learned feature critics for domain gen-
eralized semantic segmentation. 3
Tian, J., Mithun, N. C., Seymour, Z., Chiu, H., and Kira,
Z. (2021). Striking the right balance: Recall loss for
semantic segmentation. 3
Varma, G., Subramanian, A., Namboodiri, A., Chandraker,
M., and Jawahar, C. (2019). Idd: A dataset for ex-
ploring problems of autonomous navigation in uncon-
strained environments. In IEEE Winter Conf. on Ap-
plications of Computer Vision (WACV). 1, 2, 5, 12
Wang, J., Sun, K., Cheng, T., Jiang, B., Deng, C., et al.
(2021a). Deep high-resolution representation learning
for visual recognition. IEEE Transactions on Pattern
Analysis and Machine Intelligence. 1
Wang, Q., Dai, D., Hoyer, L., Van Gool, L., and Fink,
O. (2021b). Domain adaptive semantic segmentation
with self-supervised depth estimation. In IEEE/CVF
International Conference on Computer Vision (ICCV).
2, 3
Watanabe, K., Saito, K., Ushiku, Y., and Harada, T. (2018).
Multichannel semantic segmentation with unsuper-
vised domain adaptation. European Conference on
Computer Vision (ECCV) Workshop. 2, 3
Wu, Z., Shen, C., and Hengel, A. (2016). Wider or deeper:
Revisiting the resnet model for visual recognition.
Pattern Recognition. 5
Xiang, K., Wang, K., and Yang, K. (2019). A compara-
tive study of high-recall real-time semantic segmen-
tation based on swift factorized network. Security +
Defence. 3
Xiang, K., Wang, K., and Yang, K. (2019). Importance-
aware semantic segmentation with efficient pyrami-
dal context network for navigational assistant systems.
IEEE Intelligent Transportation Systems Conference
(ITSC). 3
Yan, W., Wang, Y., Gu, S., Huang, L., Yan, F., et al. (2019).
The domain shift problem of medical image segmen-
tation and vendor-adaptation by unet-gan. Medical
Image Computing and Computer Assisted Interven-
tion. 3
Zhang, L., Li, X., Arnab, A., Yang, K., Tong, Y., et al.
(2019). Dual graph convolutional network for seman-
tic segmentation. In British Machine Vision Confer-
ence (BMVC). 2, 5
Zhao, Y., Zhong, Z., Zhao, N., Sebe, N., and Lee, G. H.
(2022). Style-hallucinated dual consistency learning
for domain generalized semantic segmentation. 3
Zhong, Y., Yuan, B., Wu, H., Yuan, Z., Peng, J., et al.
(2021). Pixel contrastive-consistent semi-supervised
semantic segmentation. In IEEE/CVF International
Conference on Computer Vision (ICCV). 3
APPENDIX
A Details on Meta Classification
The semantic segmentation neural network provides
for each pixel z a probability distribution f
z
(y|x) over
a label space C = {y
1
,... , y
c
}, with y ∈ C and given an
input image x. The degree of randomness in semantic
segmentation prediction is quantified by (pixel-wise)
dispersion measures, such as the entropy
E
z
(x) = −
1
log(c)
∑
y∈C
f
z
(y|x)log f
z
(y|x), (3)
(see Figure 5 (right)) the variation ratio
V
z
= 1 − f
z
( ˆy
z
(x)|x) (4)
or the probability margin
M
z
(x) = V
z
+ max
y∈C \{ ˆy
z
(x)}
f
z
(y|x) (5)
with predicted class ˆy
z
(x) (see Equation 1). Based
on the different behavior of these measures and the
segment’s geometry for correct and false predictions,
we construct segment-wise features by hand to quan-
tify the observations that we made. Let
ˆ
P
x
denote
the set of predicted segments, i.e., connected compo-
nents, (of the foreground class). By aggregating these
pixel-wise measures, segment-wise features are ob-
tained and serve as input for the meta classifier. To
this end, we compute for each segment q ∈
ˆ
P
x
the
mean of the pixel-wise uncertainty values of a given
segment, i.e., mean dispersions
¯
D, D ∈ {E,V,M}.
Furthermore, we distinguish between the inner of the
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
406
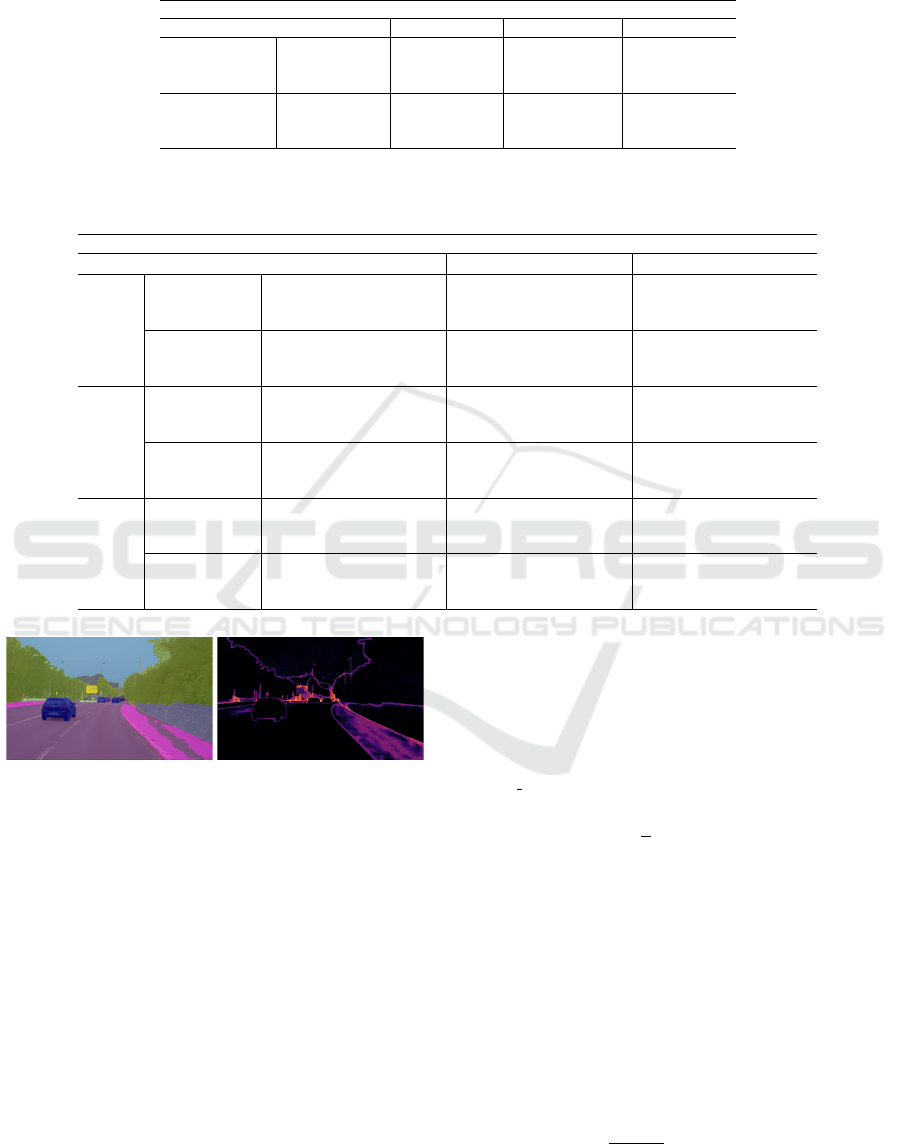
Table 5: Evaluation results using meta classification (F
∗
1
) and without (F
1
(1)) for the basic semantic segmentation predic-
tion (DeepLabv3+/DualGCNet) and our approach, i.e., the DeepLabv3+/DualGCNet prediction aggregated with foreground-
background prediction using BTS or Monodepth2.
Cityscapes A2D2 LostAndFound IDD
F
1
(1) F
∗
1
F
1
(1) F
∗
1
F
1
(1) F
∗
1
F
1
(1) F
∗
1
DeepLabv3+ 84.00 94.69 52.16 76.36 49.54 53.06 69.14 87.79
+ BTS 43.16 95.80 25.09 80.46 40.19 57.80 39.00 91.75
+ Monodepth2 38.11 95.73 17.16 80.72 33.61 60.41 25.73 91.45
DualGCNet 82.82 92.77 25.89 65.48 45.88 50.21 64.11 87.37
+ BTS 53.99 94.66 25.40 51.22 40.17 53.59 44.64 89.78
+ Monodepth2 50.92 94.58 23.98 57.26 35.07 57.06 35.87 89.82
Table 6: Performance results for the basic semantic segmentation prediction (DeepLabv3+/DualGCNet) vs. our approach,
i.e., the DeepLabv3+/DualGCNet prediction aggregated with foreground-background prediction using BTS or Monodepth2,
for class person, car and bicycle.
Cityscapes A2D2 IDD
AUPRC
¯
F
1
F
∗
1
AUPRC
¯
F
1
F
∗
1
AUPRC
¯
F
1
F
∗
1
person DeepLabv3+ 83.11 80.33 84.66 40.66 40.19 54.83 39.70 35.31 56.78
+ BTS 87.36 80.36 86.89 47.10 43.37 55.43 46.14 41.05 54.94
+ Monodepth2 86.87 80.27 86.62 48.85 41.83 56.60 48.88 40.73 56.80
DualGCNet 75.05 73.30 77.12 13.67 17.64 35.34 31.29 25.37 47.28
+ BTS 79.72 73.24 80.30 13.28 20.68 28.42 36.94 30.23 47.72
+ Monodepth2 78.39 72.78 79.70 13.56 21.28 28.61 41.51 31.48 48.08
car DeepLabv3+ 86.19 85.18 89.31 64.77 56.21 73.16 55.25 39.92 70.03
+ BTS 89.20 85.69 90.61 75.53 66.74 77.44 69.99 50.97 73.45
+ Monodepth2 88.83 85.15 90.20 74.82 67.26 77.45 68.03 49.70 72.59
DualGCNet 81.76 81.45 85.44 39.65 21.93 59.85 57.28 41.89 69.07
+ BTS 85.88 81.31 87.39 33.52 30.37 46.14 63.12 46.67 69.70
+ Monodepth2 85.24 81.24 87.13 40.63 34.00 53.89 64.52 48.50 69.93
bicycle DeepLabv3+ 85.46 80.25 87.43 37.37 47.00 49.67 14.36 9.73 33.73
+ BTS 86.99 79.02 86.64 43.78 48.47 54.88 21.70 13.70 38.25
+ Monodepth2 87.20 78.54 86.93 42.37 46.97 53.24 23.78 13.79 39.84
DualGCNet 77.05 73.43 80.62 15.22 19.85 27.27 16.06 8.68 36.79
+ BTS 79.49 72.68 81.16 8.08 21.30 23.08 16.00 9.56 33.51
+ Monodepth2 79.99 72.82 81.93 10.23 19.70 21.28 21.93 10.70 36.36
Figure 5: Left: Semantic segmentation predicted by a DNN.
Right: Entropy heatmap.
segment q
in
⊂ q consisting of all pixels whose eight
neighboring pixels are also elements of q and the
boundary q
bd
= q \ q
in
. We observe that poor or false
predictions are often accompanied by fractal segment
shapes (a relatively large amount of boundary pixels).
An example is shown in Figure 5 (left). This results
in segment size S = |q| and mean dispersion features
per segment also for the inner and the boundary since
uncertainties may be higher on a segment’s bound-
ary (see Figure 5 (right)). Additionally, we define
relative segment sizes
˜
S = S/S
bd
and
˜
S
in
= S
in
/S
bd
quantifying the degree of fractality as well as rela-
tive mean dispersions
˜
¯
D =
¯
D
˜
S and
˜
¯
D
in
=
¯
D
in
˜
S
in
where
D ∈ {E,V,M}.
For the foreground-background segmentation,
given the same input image x, we obtain for each
pixel z the probability of being a foreground pixel
g
z
(x) ∈ [0,1]. Thus, we calculate the mean and rel-
ative entropy features for the foreground-background
prediction (having only two classes), denoted by
¯
F
∗
,
∗ ∈ { ,in, bd},
˜
¯
F and
˜
¯
F
in
. Last, we add the geometric
center
¯q =
1
S
∑
(z
v
,z
h
)∈q
(z
v
,z
h
) (6)
where (z
v
,z
h
) describes the vertical and horizontal co-
ordinate of pixel z and the mean class probabilities
P(y|q) for each foreground class y ∈
˜
C ⊂ C where
˜
C = {y
1
,... , y
˜c
}, ˜c < c, to our set of hand-crafted fea-
tures.
Analogously to the set of predicted segments
ˆ
P
x
,
we denote by P
x
the set of segments in the ground
truth S
x
. To determine if a predicted segment q ∈
ˆ
P
x
is a false positive, we consider the intersection over
union. The segment-wise IoU is then defined as
IoU(q) =
|q ∩ Q|
|q ∪ Q|
, Q =
[
q
′
∈P
x
,q
′
∩q̸=
/
0
q
′
. (7)
False Negative Reduction in Semantic Segmentation Under Domain Shift Using Depth Estimation
407

B More Details on Evaluation
Metrics
Let
ˆ
P
x
denote the set of predicted segments and P
x
of
ground truth segments. Meta classification provides a
probability m(q) ∈ [0,1] for each segment q ∈
ˆ
P
x
to be
a false positive on which we threshold with different
values h ∈ H = {0.00,0.01,... , 0.99,1.00}. A pre-
dicted false positive segment is considered as back-
ground. For each threshold h, we calculate over of all
foreground segments in a given validation set X the
number of false positives
FP(h) =
∑
x∈X
∑
q∈
ˆ
P
x
1
{IoU(q)=0}
1
{m(q)≤h}
, (8)
true positives
TP(h) =
∑
x∈X
∑
q
′
∈P
x
1
{IoU
′
(q,h)>0}
(9)
and false negatives
FN(h) =
∑
x∈X
∑
q
′
∈P
x
1
{IoU
′
(q,h)=0}
(10)
where the indicator function is defined as
1
{A}
=
(
1, if event A happens
0, else
(11)
and the IoU for a ground truth segment q
′
∈ P
x
as
IoU
′
(q
′
,h) =
|q
′
∩ Q
′
|
|q
′
∪ Q
′
|
, Q
′
=
[
q∈
ˆ
P
x
,q∩q
′
̸=
/
0
m(q)≤h
q. (12)
Thus, we obtain precision, prec(h) =
TP(h)/(TP(h) + FP(h)), and recall, rec(h) =
TP(h)/(TP(h) + FN(h)), values on segment-level
dependent of h. The degree of separability is then
computed as the area under precision recall curve
(AUPRC) by thresholding the meta classification
probability. Furthermore, we use the recall rate
at 80% precision rate (REC
80
) for the evaluation.
Moreover, we consider the segment-wise F
1
score
which is defined by
F
1
(h) = 2 ·
prec(h) · rec(h)
prec(h) + rec(h)
. (13)
To obtain an evaluation metric independent of the
meta classification threshold h, we calculate the aver-
aged F
1
score
¯
F
1
= 1/|H|
∑
h∈H
F
1
(h) and the optimal
F
1
score F
∗
1
= max
h∈H
F
1
(h).
C Effects of Meta Classification
In Table 5, we show the effects of meta classifica-
tion comparing the F
1
score (see Equation 13) per-
formance with and without meta classification. F
1
(1)
corresponds to the obtained precision and recall val-
ues without post-processing, i.e., meta classification
and F
∗
1
to the best possible ratio of both rates. Note,
we use the meta classifier trained only on the source
domain dataset Cityscapes. We observe that false pos-
itive pruning significantly improves the performance
of our method as many false positive segments are
predicted by the aggregation step to reduce the num-
ber of false negatives. We increase the F
1
score of
up to 65.72 pp for our method using meta classifica-
tion. Noteworthy, the F
1
score for the basic seman-
tic segmentation performance is also enhanced by up
to 39.59 pp. Moreover, the results show that with-
out using meta classification the basic semantic seg-
mentation prediction outperforms our method. This is
caused by our foreground-background segmentation
based on depth estimation being more prone to pre-
dicting foreground segments. We produce more pos-
sible foreground segments to reduce false negatives
and using the false positive pruning, we outperform
basic semantic segmentation.
D Numerical Results per Class
Up to now, the given results have been aggregated
for all foreground classes, here we present results
for three foreground classes separately, i.e., person,
car and bicycle, see Table 6. As the LostAndFound
dataset provides only labels for road and small obsta-
cles, a class-wise evaluation is not possible. In most
cases, we outperform the basic semantic segmenta-
tion prediction, although differences for the datasets
and the three classes are observed. The highest
performance up to 89.20% AUPRC is achieved for
Cityscapes since this is the source domain and thus,
the semantic segmentation network produces strong
predictions. Under domain shift, we obtain AUPRC
values of up to 75.53%. As for the foreground classes
in general, there is no clear tendency which depth es-
timation network used in our method performs better.
For the class car, we achieve higher performance met-
rics in comparison to classes person and bicycle. Cars
occur more frequently than persons and bicycles in all
three datasets (see (Cordts et al., 2016; Geyer et al.,
2020; Varma et al., 2019)) and are easier to recog-
nize given their larger size and similar shape. In sum-
mary, we improve the detection performance of the
basic semantic segmentation network in most cases
and in particular, bridge the domain gap. Even though
our performance for bicycles, for example, is compar-
atively lower, we generally detect more overlooked
foreground segments and thus, reduce false negatives.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
408
