
IVNPRO TECT: Isolable and Traceable Lightweight CAN-Bus
Kernel-Level Protection for Securing in-Vehicle Communication
Shuji Ohira
1 a
, Araya Kibrom Desta
1 b
, Ismail Arai
2 c
and Kazutoshi Fujikawa
2 d
1
Graduate School of Science and Technology, Nara Institute of Science and Technology, Ikoma 630-0192, Japan
2
Information Initiative Center, Nara Institute of Science and Technology, Ikoma 630-0192, Japan
Keywords:
Automotive Security, Controller Area Network, Intrusion Prevention System, Operation System Kernel,
Loadable Kernel Module.
Abstract:
Cyberattacks on In-Vehicle Networks (IVNs) are becoming the most urgent issue. The Controller Area Net-
work (CAN), one of the IVNs, is a standard protocol for automotive networks. Many researchers have tackled
the security issues of CAN, such as the vulnerability of Denial-of-Service (DoS) attacks and impersonation at-
tacks. Though existing methods can prevent DoS attacks, they have problems in deployment cost, isolability of
a compromised Electronic Control Unit (ECU), and traceability for the root cause of isolation. Thus, we tackle
to prevent DoS attacks on CAN. To solve these problems of the existing methods, we propose an isolable and
traceable CAN-bus kernel-level protection called IVNPROTECT. IVNPROTECT can be installed on an ECU,
which has a wireless interface, just by the software updating because it is implemented in the CAN-bus kernel
driver. We also confirm that our IVNPROTECT can mitigate two types of DoS attacks without distinguishing
malicious/benign CAN identifiers. After mitigating DoS attacks, IVNPROTECT isolates a compromised ECU
with a security error state mechanism, which handles security errors in IVNPROTECT. And, we evaluate the
traceability that an ECU with IVNPROTECT can report warning messages to the other ECUs on the bus even
while being forced to send DoS attacks by an attacker. In addition, the overhead of IVNPROTECT is 9.049 µs,
so that IVNPROTECT can be installed on insecure ECUs with a slight side-effect.
1 INTRODUCTION
Recently, cyberattacks on In-Vehicle Networks
(IVNs) are becoming a severe problem (Nie et al.,
2017; Miller and Valasek, 2015). These attacks abuse
vulnerable Controller Area Network (CAN) (Robert-
Bosch-GmbH, 1991), one of the IVNs used to com-
municate among Electronic Control Units (ECUs),
which has been the de-facto standard. Also, ECU
is an in-vehicle embedded system to electronically
manipulate automotive functions (e.g., engine, gear,
steering). Nie et al. successfully controlled some au-
tomotive functions, exploiting the vulnerabilities in a
CAN and a web browser in the in-vehicle system im-
plemented by WebKit of the old version (Nie et al.,
2017). And, Miller and Valasek also successfully con-
trolled a variety of automotive functions through an
a
https://orcid.org/0000-0002-6966-0977
b
https://orcid.org/0000-0002-4363-8560
c
https://orcid.org/0000-0002-5353-2401
d
https://orcid.org/0000-0003-1055-5790
in-vehicle infotainment system with the QNX real-
time operating system (Miller and Valasek, 2015).
In addition, automotive manufacturers and suppli-
ers promote the use of open-source software such as
Automotive Grade Linux (AGL) (Linux-Foundation,
2019) in in-vehicle infotainment systems to enhance
the reusability of source codes. If the open-source
software has vulnerabilities, an attacker can launch
malware against the vulnerable systems on a large
scale. Therefore, cybersecurity countermeasures for
automobiles are urgently required.
Encryption and authentication (Pesé et al., 2021;
Kurachi et al., 2014) for CAN have been proposed to
prevent spoofing attacks from a compromised ECU.
However, encryption and authentication mechanisms
cannot deal with Denial-of-Service (DoS) attacks
since an attacker can flood encrypted CAN-bus with
DoS using a high-priority identifier (ID). Therefore, a
dedicated countermeasure is required to prevent DoS
attacks.
On the other hand, many automotive security re-
searchers have proposed intrusion detection systems
Ohira, S., Araya, K., Arai, I. and Fujikawa, K.
IVNPROTECT: Isolable and Traceable Lightweight CAN-Bus Kernel-Level Protection for Securing in-Vehicle Communication.
DOI: 10.5220/0011605300003405
In Proceedings of the 9th International Conference on Information Systems Security and Privacy (ICISSP 2023), pages 17-28
ISBN: 978-989-758-624-8; ISSN: 2184-4356
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
17

(IDSs) based on various characteristics (e.g., fre-
quency (Song et al., 2016), entropy (Wu et al., 2018a),
ID sequence (Marchetti and Stabili, 2017), message
correlation (Müter et al., 2010; Ohira et al., 2020),
physical-layer fingerprint (Kneib and Huth, 2018;
Kneib et al., 2020; Ohira et al., 2021)). These IDSs
achieved the detection of various attacks including
DoS attacks with high accuracy. However, these IDSs
do not provide any prevention mechanism. Therefore,
it is necessary to build a prevention mechanism with
features from attack detection to prevention.
Some countermeasures to disable DoS attacks on
CAN have been researched. The allowlist-based mit-
igation method (Elend and Adamson, 2017) has been
proposed as one of the countermeasures. This method
filters message transmission based on a predefined al-
lowlist on a CAN-specific hardware. It can disable
DoS attacks with the highest priority CAN ID: 0x000;
in other words, it passes only allowlisted messages
permanently. Hence, it is ideal for mitigating and iso-
lating a DoS attacker who uses both malicious and
benign messages.
Moreover, this method requires additional hard-
ware; therefore, it also has a drawback in deployabil-
ity. On the other hand, a frame-corruption method
(Takada et al., 2019) conducts malicious frame-
corruption with error frames by a legitimate ECU with
IDS. This method transfers a compromised ECU to
bus-off state, which is a disconnected state of an ECU
from the CAN-bus (i.e., an ECU in the bus-off state
cannot send/receive CAN messages). Originally, the
bus-off state is designed to handle a fault in the ECUs,
so that the frame corruption method cannot distin-
guish whether the bus-off state occurred due to a fault
or a security incident. In consequence, if the bus-off
state of a compromised ECU occurs due to a security
incident, the other ECUs cannot conduct incident re-
sponse operations, such as switching to manual opera-
tion of the vehicle. In other words, if there is a protec-
tion method that can distinguish whether the bus-off
state occurred through a fault or a security incident,
the ECUs on the attacked vehicle can conduct some
operations to minimize the security risk. In summary,
these countermeasures have problems in terms of the
isolability of a compromised ECU, the deployability,
and the traceability of the root cause for isolation.
To solve these drawbacks, we propose an isolable
and traceable In-Vehicle Network bus kernel-level
Protection approach called IVNPROTECT. IVNPRO-
TECT can be installed on an ECU that has a wireless
interface with just a software update because it is im-
plemented in the CAN-bus kernel driver. We also con-
firm that our IVNPROTECT can mitigate two types of
DoS attacks without distinguishing malicious/benign
CAN IDs. After mitigating DoS attacks, IVNPRO-
TECT isolates a compromised ECU with a security er-
ror state mechanism, which handles the security er-
ror in IVNPROTECT. Furthermore, we evaluate the
traceability that an ECU with IVNPROTECT, which
can report warning messages to the other ECUs on the
bus even while being forced to send DoS attacks by an
attacker. In addition, we experimentally show that the
ECU installed IVNPROTECT can send the warning
messages with a 0 % of transmission loss rate. More-
over, the overhead of IVNPROTECT is 9.049 µs, so
that IVNPROTECT can be installed on insecure ECUs
with minimal side-effects. We release the source code
of our IVNPROTECT, which is available on a GitHub
repository
1
.
The main contributions of this paper can be sum-
marized as follows.
• We propose an isolable and traceable lightweight
CAN-bus protection called IVNPROTECT. IVN-
PROTECT is implemented to a CAN-bus kernel
driver on Linux. Hence, our IVNPROTECT can
deploy to an ECU by just software updating.
• We provide a new error state mechanism on IVN-
PROTECT for handling security incidents. IVN-
PROTECT mitigates DoS attacks and isolates a
compromised ECU based on this security error
state mechanism.
• We experimentally confirm the traceability that
IVNPROTECT reports warning messages for le-
gitimate ECUs to distinguish whether the cause
of isolation is a fault or a security incident.
• We show the overhead caused by IVNPROTECT.
As a result, the overhead takes only 9.049 µs,
which means that a system with our IVNPRO-
TECT satisfies in-vehicle real-time demands.
2 PRELIMINARIES
2.1 Controller Area Network
CAN is one of the IVNs widely used to interconnect
among ECUs and has been a standard protocol. As
shown in Fig. 1, a CAN message has a maximum
data field of 8 bytes, whose length is determined by
the Data Length Code (DLC) in the control field. The
data field delivers sensor data and control data such
as running speed, engine speed, and gear position.
The arbitration field is assigned via a unique ID ex-
pressed from 0x000 to 0x7FF for each data. This ID is
called CAN ID, and it prioritizes the messages when
1
https://github.com/shuji-oh/ivnprotect
ICISSP 2023 - 9th International Conference on Information Systems Security and Privacy
18
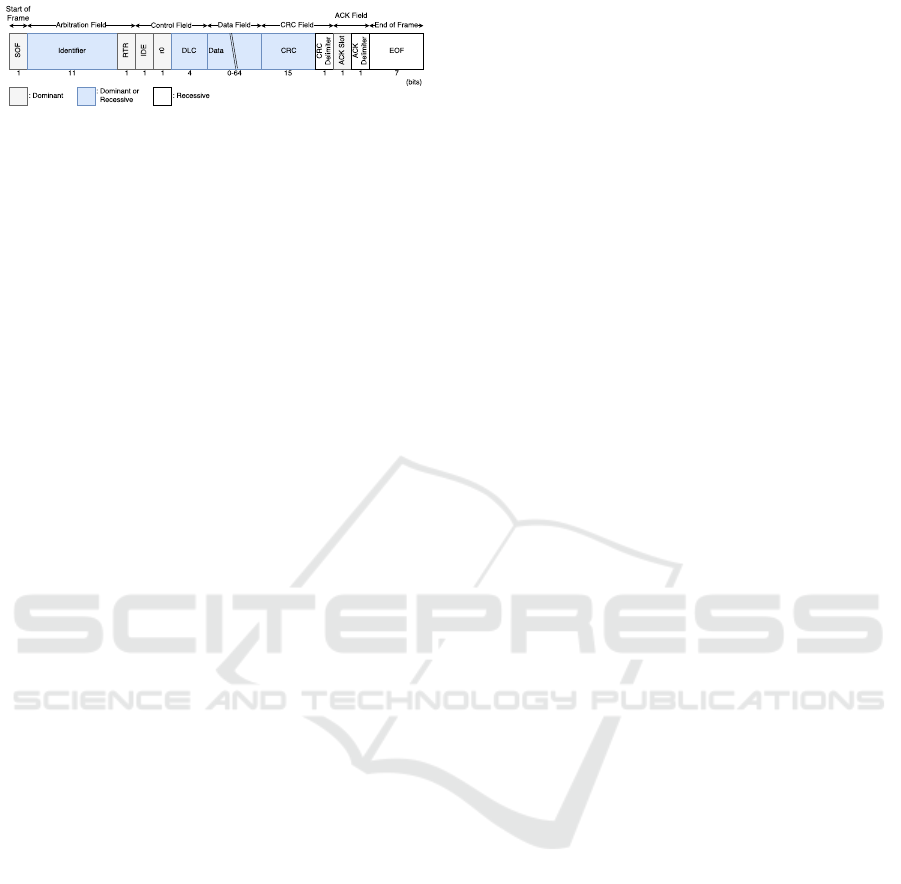
Figure 1: CAN data frame format.
multiple messages are being sent simultaneously from
ECUs. Lower CAN IDs have a higher priority. In
other words, 0x000 is the highest priority ID for CAN
protocol.
Next, we explain the error handling mechanism of
CAN. CAN has a fault error state mechanism for high
fault tolerance. The error state mechanism consists of
three states (error active state, error passive state, and
bus-off state). At first, an ECU starts in the error ac-
tive state. Then if the ECU detects several errors (i.g.
a CRC error), it transits into the error passive state in
which the ECU cannot receive the messages on the
bus. Finally, suppose the ECU still detects several er-
rors in the error passive state. In that case, the ECU
will be at the bus-off state, which expresses the ECU
is logically isolated from the bus. Namely, the ECU
in bus-off state cannot send the messages to the bus
and receive the messages on the bus. To recover from
bus-off state, the ECU in bus-off state needs to reset
software or reboot.
2.2 Related Works
Various intrusion detection methods (e.g., arrival time
(Song et al., 2016), entropy (Wu et al., 2018a), and
voltage (Kneib and Huth, 2018)), and authentication
mechanisms (Pesé et al., 2021; Kurachi et al., 2014)
have been studied in order to secure IVNs. These in-
trusion detection methods focus on detecting spoof-
ing, replaying, and DoS attacks but do not provide
protection against the attacks. Conversely, the au-
thentication mechanisms focus on protecting spoof-
ing and replaying attacks. In other words, the existing
intrusion detection methods and authentication mech-
anisms cannot protect DoS attacks on CAN-bus.
In the rest of this section, we introduce some exist-
ing protection methods dedicated to preventing DoS
attacks.
2.2.1 Protections Implemented on a Bus
Wu et al. proposed an ID-hopping moving target de-
fense (Humayed and Luo, 2017; Woo et al., 2019; Wu
et al., 2018b) to protect a DoS attack against individ-
ual ECUs (called targeted DoS attacks) and reverse
engineering CAN messages. They implemented the
ID-hopping mechanism to the CAN controller, hard-
ware embedded on an ECU. The ID-hopping is car-
ried out in all ECUs on the CAN-bus, so it is required
to install the ID-hopping CAN controller to all ECUs.
While it can protect against targeted DoS attacks, but
it cannot protect against DoS attacks with the highest
priority CAN ID: 0x000.
A relays-based reactive defense called CANARY
(Groza et al., 2021) divides the bus by activat-
ing/deactivating some relays implemented on the bus.
To protect the bus against DoS attacks, CANARY di-
vides the bus by deactivating the relays surrounding
the compromised ECU. A CANARY-based bus also
has a Bus-Guardian node that detects attacks and ma-
nipulates relays. Thus, even in the isolation of the
compromised ECU, the others ECUs can trace the
root cause of isolation via the Bus-Guardian ECU.
However, since CANARY needs additional hardware
(relays, resistors, and wires), it has a drawback in de-
ployment cost. Moreover, the relay action has a neg-
ative aspect because it corrupts the benign message
sent during activating/deactivating relays.
2.2.2 IDS-side Protection
The frame corruption approach (Takada et al., 2019)
has been studied. This approach uses error frames
to forcibly transfer a targeted compromised ECU’s
state to the bus-off state. It is possible to send er-
ror frames with unmodified CAN controllers so that
the approach easily deploys ECUs through software
updates. However, because the frame corruption ap-
proach uses error frames, it is inherently difficult to
distinguish whether the cause of isolation is a fault
or a security incident. Furthermore, the error frames
generated by this approach contaminate the commu-
nication of the bus, which negatively influences the
arrival time of some messages and busloads.
2.2.3 ECU-side Protections
Unlike the protections of IDS-side and on-bus, the
ECU-side protection has an advantage in unharm-
ing for messages on the bus when its protection is
triggered. Elend et al. developed a secure CAN
transceiver (Elend and Adamson, 2017) that filters
message transmission based on a predefined allowlist
in the CAN transceiver. In other words, the secure
CAN transceiver protects a compromised ECU from
sending malicious ID messages. But an attacker who
compromised an ECU with this transceiver can trans-
mit some allowlisted messages permanently. There-
fore, it is necessary to deal with the flooding with
malicious/benign ID. Moreover, the deployment cost
is high since it needs to replace the CAN transceiver
hardware.
The most relevant research to our IVNPROTECT
IVNPROTECT: Isolable and Traceable Lightweight CAN-Bus Kernel-Level Protection for Securing in-Vehicle Communication
19

is TEECheck (Mishra et al., 2020), proposed by
Mishra et al. TEECheck has advantages regarding
the complete isolation of a compromised ECU, trace-
ability of the root cause of the bus-off state, and un-
harming benign messages. This approach isolates
a malicious process in a compromised ECU using
TrustZone, a Trusted Execution Environment (TEE).
Namely, TEECheck does not carry out the discon-
nection at ECU-unit, such as the division of buses
using CANARY, because an attacker is isolated at
the processing unit. It means that TEECheck en-
sures traceability to the root cause of isolation since
an ECU with TEECheck only becomes the bus-off
state caused by fault incidents. On the other hand, the
vulnerabilities/bugs related to the implementation of
TrustZone have been reported (Machiry et al., 2017;
Guilbon, 2018). Therefore, an attacker possibly ex-
ploits the TEE’s vulnerabilities for flooding the bus.
In addition, TEECheck can only deploy to ARM-
based ECUs, so it has the limited deployability.
Table 1 shows a comparison between the afore-
mentioned protections and our proposal. The exist-
ing protections have problems in incomplete isola-
tion, traceability on the cause of isolation, deploy-
ment cost, and side-effect against some benign mes-
sages of legitimate ECUs. Detailed comparisons of
ECU-side protections are discussed in section 6.1. To
solve these problems, we propose an isolable, trace-
able, and deployable kernel-level protection in the
next section.
3 CAN-Bus KERNEL-LEVEL
PROTECTION: IVNPROTECT
3.1 Threat Models
At first, we describe the assumption of the threat
model. We assume that the attacker has privileged
access. But, the attacker cannot replace kernel mod-
ules because we suppose installed kernel modules are
signed by a trusted party. Moreover, the attacker also
does not disrupt its kernel since the attacker only has
the motivation to disrupt CAN-bus communication.
In other words, we assume that the attacker does not
shutdown attacks on the compromised system. In the
following section, we define two DoS attacks as threat
models.
3.1.1 Malicious ID DoS
Malicious ID DoS is the most critical threat to CAN-
bus communication. This attack uses the highest pri-
ority ID (0x000) on CAN to fill the networks. It
brings unexpected vehicle behavior and stops some
functions (e.g., power steering).
3.1.2 Benign ID DoS
Benign ID DoS abuses the highest priority ID as-
signed to a compromised ECU. In other words, be-
nign ID DoS is a DoS attack using the highest priority
legitimate ID used by an actual ECU. It implies that
benign ID DoS is less aggressive than the aforemen-
tioned malicious ID DoS because it is expected that
some benign IDs are higher priority than the ID used
by benign ID DoS. However, benign ID DoS is still a
critical threat against some benign IDs that are lower
priority than the ID used by benign ID DoS.
3.2 Problem Statement
We design an isolable, traceable, and deployable
kernel-level protection (IVNPROTECT) that satisfies
the following statements.
3.2.1 P1: Prevent DoS Attacks (Malicious ID
DoS and Benign ID DoS)
An attacker tries to flood the CAN bus by sending
numerous messages. To deal with the attacker, IVN-
PROTECT monitors the CAN IDs of transmitted mes-
sages in the compromised ECU. In case the CAN ID
of a transmitted message is not a benign ID (i.e., not
an allowlisted ID), IVNPROTECT cancels the mes-
sage transmission. In contrast, if the CAN ID of a
transmitted message is a benign ID, IVNPROTECT
also analyzes the context of the transmitted IDs and
then reduces the transmission rate if the context is an
anomaly.
3.2.2 P2: Isolate a Compromised ECU
To prevent the permanent malicious activity by an at-
tacker in a compromised ECU, our protection isolates
such compromised ECUs from the CAN-bus. How-
ever, it is important to determine when to isolate a
compromised ECU. Specifically, it is required that
IVNPROTECT should isolate the compromised ECU
after reporting some warning messages to the other
ECUs on the bus because the other ECUs can change
some operations to minimize the security risk after
receiving the warning messages. For instance, if the
attacked vehicle has autonomous functions, the other
ECUs can switch to manual operations to prevent ex-
ploiting autonomous functions.
ICISSP 2023 - 9th International Conference on Information Systems Security and Privacy
20
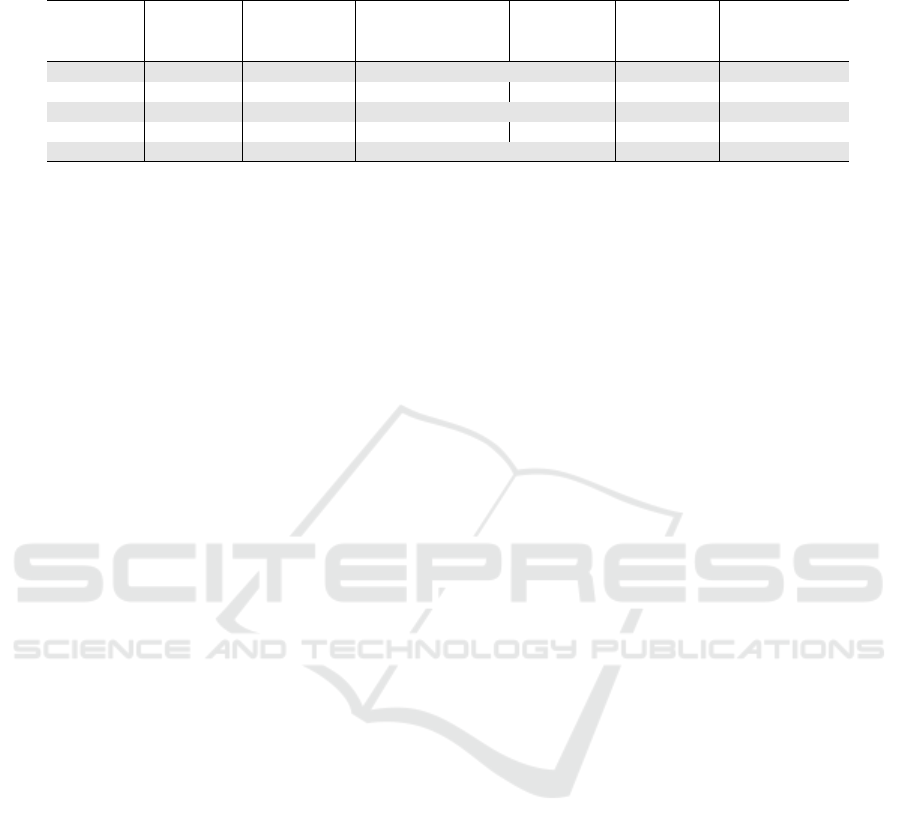
Table 1: Comparison among CAN-bus protections in Implementation Location (I.L.), Isolability, Traceability for Root-cause
of Isolation (T.R.I.), Deployment Cost (D.C.), Harm for Benign Messages of legitimate ECUs (H.B.M.).
CANARY ID-Hopping Frame Corruption Elend et al. TEECheck IVNPROTECT
I.L. Bus Bus IDS ECU ECU ECU
Isolability Complete Partial Complete Partial Complete Complete
T.R.I. Yes - No - Yes Yes
D.C. High High Low High Middle Low
H.B.M. Harmful Harmful Harmful Unharmful Unharmful Unharmful
3.2.3 P3: Report Warning Messages During DoS
As described in P2, IVNPROTECT must isolate the
compromised ECU after reporting some warning
messages. To ensure working this function, IVN-
PROTECT is required to satisfy the following require-
ments:
1. A benign transmission loss rate of 0% during DoS
activities
2. A worst arrival time of benign messages, less than
isolation time by IVNPROTECT
3. A higher priority of warning messages than the
others IDs
3.2.4 P4: Deploy IVNPROTECT with a Slight
Overhead
Due to deploying to resource-constrained ECUs, we
must minimize the overhead caused by running IVN-
PROTECT. Specifically, we define a requirement that
the IVNPROTECT’s overhead must be below 494 µs
which is the transmission overhead by TEECheck
(Mishra et al., 2020).
3.3 Overview of IVNPROTECT
IVNPROTECT consists of four stages, allowlist and
similarity analysis-based detection modules, security
error states, sending function and discarding function,
as shown in Fig. 2. In the allowlist and similarity
analysis-based detection modules stage, these mod-
ules detect malicious ID and benign ID DoS attacks.
In the security error states stage, the security error
such as DoS attacks is managed by the state in this
stage. Finally, IVNPROTECT determines whether to
send the CAN message or discard it based on the state
of security error states stage. Also, by installing IVN-
PROTECT to all ECU on CAN, it is possible to isolate
a compromised ECU no matter which compromised
ECU the attacker intrudes in.
Also, we assume that IVNProtect is installed on
Linux-based ECUs such as the AGL based in-vehicle
infotainment system (Sivakumar et al., 2020), be-
cause such ECUs with entry points to external net-
works have been compromised in the actual hacking
(Nie et al., 2017; Miller and Valasek, 2015). In the
following sections, we describe each stage in order.
3.4 Detection Modules
To solve P1, we provide two detection modules in
this section. Based on the results of these modules,
IVNPROTECT determines whether to conduct protec-
tion procedures (dropping messages or inserting a de-
lay). The first is the allowlist-based detection module,
which is introduced to prevent malicious ID DoS. The
second one is the similarity analysis-based detection
module, which can detect benign ID DoS.
3.4.1 Allowlist-Based Detection Module
To disable malicious ID DoS, we add a module that
discards incoming messages based on an allowlist of
CAN IDs. We assume that this allowlist is pre-defined
in the CAN-bus kernel driver before factory shipment
based on the CAN IDs that the ECU sends. There-
fore, if an attacker who intrudes on the ECU installing
IVNPROTECT and tries to modify the allowlist, the
attacker has to replace the CAN-bus kernel driver with
the attacker’s driver. We also suppose that the origi-
nal CAN-bus kernel driver is signed by a trusted party
such as automotive suppliers. It implies that the at-
tacker cannot replace the original CAN-bus kernel
driver with the attacker’s driver.
3.4.2 Similarity Analysis-Based Detection
Module
To prevent benign ID DoS, we provide the similar-
ity analysis-based detection module in this section.
This module uses a similarity analysis-based detec-
tion method (Ohira et al., 2020) to detect DoS attacks
quickly by a single ID or randomized IDs. This de-
tection method detects DoS attacks by calculating the
similarity (called Simpson coefficient) between Win-
dow IDs (WIDs) and Criterion IDs (CIDs). The CIDs
are composed of the W number of benign CAN IDs,
which are pre-defined before the detection-phase. The
IVNPROTECT: Isolable and Traceable Lightweight CAN-Bus Kernel-Level Protection for Securing in-Vehicle Communication
21
Benign
Process
CAN Controller
Allowlist-Based
Detection for
Malicious ID
Similarity-Based
Detection for
Benign ID
Security
Error States
Discarding
Function
Sending
Function
CAN Kernel Driver
with IVNProtect
kerneluser
Bengin
Message
0xB4.00…
Malicious
or
Benign
ID Data
ID Data
ID Data
0xB4.00…
Malicious
Message
0x6AF.FD…
Figure 2: Diagram of the proposed IVNProtect.
WIDs include the W number of the latest CAN IDs
of recently received CAN messages. CIDs and W
are pre-defined by an optimization algorithm based
on Simulated Annealing (SA) before the detection-
phase. As one example, we show the pre-defined pa-
rameters calculated from our evaluation dataset using
the SA-based algorithm (Ohira et al., 2020) as fol-
lows.
W =7,
σ
s
=0.3414,
CIDs ={0x3b8, 0x3b9, 0x3ba, 0x3ba, 0x3bc, 0x3bd,
0x463}
where σ
s
is the deviation of benign similarity.
This method also requires defining these pa-
rameters in the CAN-bus kernel driver as with the
allowlist-based detection module. These parameters
are calculated and pre-defined before factory ship-
ment for each ECUs. Thus, as with the allowlist-
based detection module, these parameters related to
similarity analysis-based detection are protected from
the attacker’s modification.
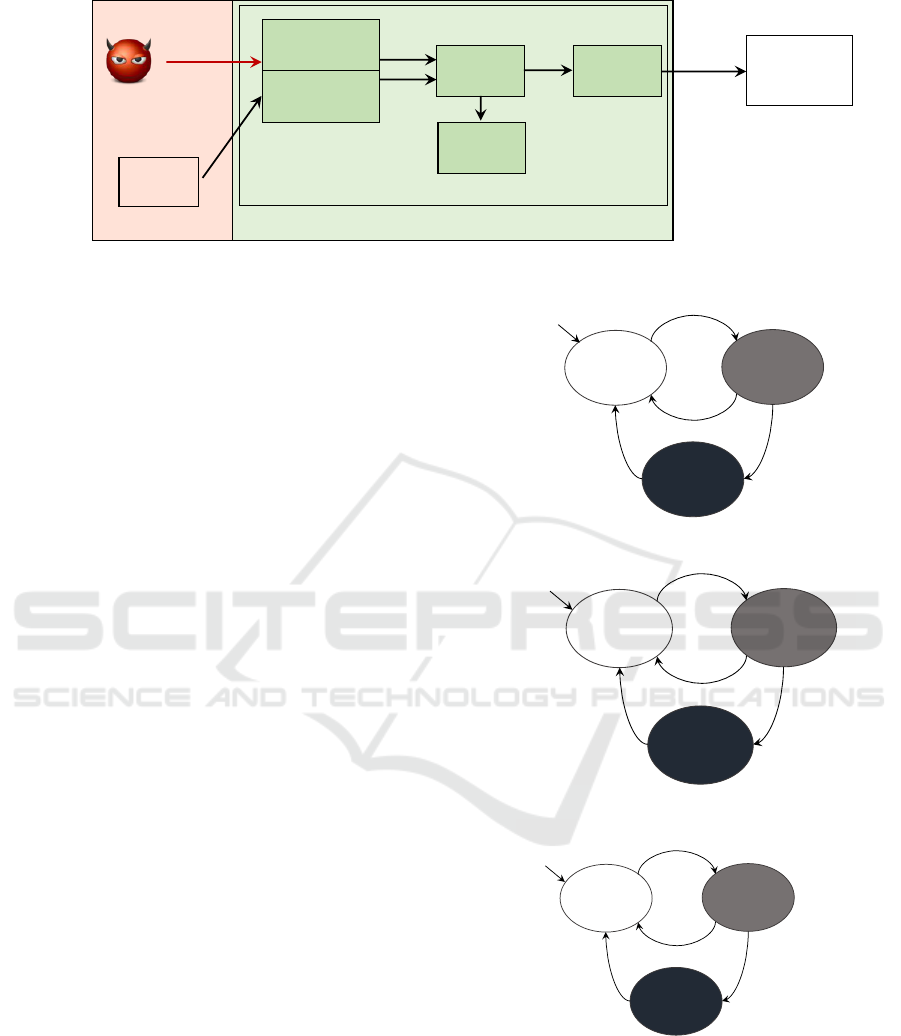
3.5 Security Error State Mechanism
To meet P2 and P3, we employ a security error state
mechanism (Fig. 3) for the isolation of a compro-
mised ECU, inspired by the fault error state mech-
anism specified in CAN. This section explains the
functions and the statements of transition in each
state.
3.5.1 Security Error Active State
Security error active state implies that there is no se-
curity incident so that IVNPROTECT does not execute
any functions in this state. As shown in Fig. 3 (a),
if a detection module (e.g., allowlist-based detection)
finds some malicious activity in this state, the ECU
immediately transfers to the following security error
passive state.
Sec. error
passive
Sec.
bus-off
Sec. error
active
detection counter ≥ 1
detection counter < 1
detection
counter > 255
Reset
(a) General security error states.
Sec. error
passive
Sec.
bus-off
Sec. error
active
ID violation error ≥ 1
ID violation error < 1
ID violation
error > 255
Reset
(b) Security error states for malicious ID DoS.
Sec. error
passive
Sec.
bus-off
Sec. error
active
Similarity error ≥ 1 OR
ID violation error ≥ 1
Similarity error < 1 AND
ID violation error < 1
Similarity error > 255 OR
ID violation error > 255
Reset
(c) Security error states for malicious/benign ID
DoS.
Figure 3: Security (Sec.) error states on IVNPROTECT.
3.5.2 Security Error Passive State
Security error passive state expresses that DoS attack
activity has begun to be observed. For example, as
shown in Fig. 3 (b), this state is entered when an ID
ICISSP 2023 - 9th International Conference on Information Systems Security and Privacy
22

outside the allowlist is sent (i.e., ID violation error).
The security error states for both malicious and be-
nign DoS attacks are shown in Fig. 3 (c). As the same
as Fig. 3 (b), this state is entered when an ID out-
side the allowlist is sent (i.e., ID violation error). In
addition, in the case of sending messages with malig-
nant similarity, this state also is entered. We define the
case of sending messages with malignant similarity as
similarity error.
Moreover, a compromised ECU reports a warn-
ing message for the other ECUs to change some op-
erations to minimize the security risk. For instance,
if the attacked vehicle has autonomous functions, the
not compromised ECUs can change to manual opera-
tions to prevent exploiting autonomous functions.
3.5.3 Security Bus-off State
Security bus-off state completely disables the abil-
ity to send and receive to isolate a compromised
ECU. This state can prevent an attacker from send-
ing benign ID messages permanently or spreading
the attacker’s infection with some software updating
scheme on CAN (e.g., ISO-TP).
This state is entered if either a lot of similarity er-
ror or an ID violation error increases. However, it is
important to determine when to isolate the compro-
mised ECU. The optimal threshold is defined in Sec.
6.2.
4 IMPLEMENTATION
In this section, we describe the implementation of
IVNPROTECT. We implemented the procedures re-
lated to IVNPROTECT to the CAN-bus kernel driver
2
in Linux kernel v.5.10.
First, we explain the procedures of detection
modules. We add the allowlist- and similarity
analysis-based detection to the message transmis-
sion function mcp251x_tx_work_handler(). Al-
gorithm 1 provides the message transmission func-
tion including IVNPROTECT procedures. To im-
plement the allowlist-based discarding messages, we
used two Linux kernel functions, dev_kfree_skb()
(line 35), which frees a buffer for storing packet
data, and netif_wake_queue() (line 36), which wakes
up the currently stopped queue and asks the ker-
nel to resume sending messages. Specifically, in
case of transmission of malicious ID, our IVNPRO-
TECT executes dev_kfree_skb() to eliminate mali-
2
https://github.com/raspberrypi/linux/blob/
4a1f59200d36993f6b32742c03c154ae275bd89c/drivers/
net/can/spi/mcp251x.c
cious transmission and then netif_wake_queue() to
immediately resume next sending for benign mes-
sages. By the way, note that the other CAN ker-
nel driver also has the message transmission function
like mcp251x_tx_work_handler(). Therefore, IVN-
PROTECT can be implemented on various CAN pe-
ripherals.
Algorithm 1: CAN message transmission algorithm in a
kernel driver with IVNPROTECT.
Input: can_priv, W IDs, CIDs, W, allowlist
Output: None
1: function calc_similarity(set1, set2, set_size)
2: return
|set1∩set2|
set_size
3: end function
4:
5: can_ f rame ⇐ can_priv->packet_data;
6: similarity ⇐ 0;
7: is_ID_violation_error ⇐ False;
8: is_similarity_error ⇐ False;
9:
10: // calculate similarity
11: can_ f rame->can_id is added to W IDs
12: if ++window_idx ≥ W then
13: similarity ⇐ calc_similarity(W IDs, CIDs, W );
14: window_idx ⇐ 0;
15: memset(W IDs, 0, sizeof(W IDs)); // initialize W IDs
16: end if
17:
18: // validate CAN ID and similarity
19: mutex_lock(&can_priv)
20: if can_ f rame->can_id is not in allowlist then
21: can_priv->can_device_sec_stats-
>ID_violation_error++;
22: is_ID_violation_error ⇐ True;
23: update can_priv->sec_state
24: else if similarity exceeds a benign range defined by σ
s
then
25: can_priv->can_device_sec_stats-
>similarity_error++;
26: is_similarity_error ⇐ True;
27: update can_priv->sec_state
28: end if
29:
30: // send CAN message
31: if can_priv->sec_state is security bus-off state then
32: free the packet data in can_priv with
dev_kfree_skb()
33: else if then
34: if is_ID_violation_error then
35: free the packet data in can_priv with
dev_kfree_skb()
36: wake up the CAN device with
netif_wake_queue()
37: else if is_similarity_error then
38: mdelay(10);
39: end if
40: send CAN message of can_priv->packet_data
41: end if
42: mutex_unlock(&can_priv)
IVNPROTECT: Isolable and Traceable Lightweight CAN-Bus Kernel-Level Protection for Securing in-Vehicle Communication
23

Next, we describe the detail of similarity analysis-
based detection. To implement the module, we added
a new similarity calculation function (line 1-3) and
some variants for the calculation. IVNPROTECT con-
ducts the similarity calculation per fixed messages
(line 11-16). And, in case of malignant similarity,
IVNPROTECT executes delay function mdelay(10)
(line 38), which stops the sending procedure during
10 ms.
Finally, we explain the implementation of security
error states. At first, we added two member variants,
enum sec_state and struct can_device_sec_stats
into struct can_priv which contains CAN common
private data such as error state, sending data, etc. The
sec_state expresses the current security error state of
the CAN interface; for example, if sec_state is 0, it
expresses that the current state is the security error
active state. The can_device_sec_stats contains the
detection counter, such as ID violation error for secu-
rity error states. Thus, if the detection module discov-
ers some malicious activities, the detection counter
in can_device_sec_stats increases. Then, IVNPRO-
TECT manages the security error states based on this
detection counter in can_device_sec_stats in our im-
plementation.
5 EVALUATION
5.1 Environment and Dataset
In this section, we explain our experimental envi-
ronment and the specification of devices. At first,
we set up the experimental CAN-bus in our labora-
tory. This CAN-bus includes three ECUs, (1) a Rasp-
berry Pi 3 Model B with IVNPROTECT, (2) an ac-
tual combination-meter ECU that automatically sends
CAN messages, (3) an experimental ECU which is
called ECUsim 2000 which supplies the power to the
bus.
To emulate the CAN messages sent by one
ECU, we logged 10090 messages from the actual
combination-meter ECU. Hereafter, we evaluated var-
ious metrics of our IVNPROTECT, such as transmis-
sion loss rate and transmission delay when a DoS at-
tack is performed while sending this 10090 message.
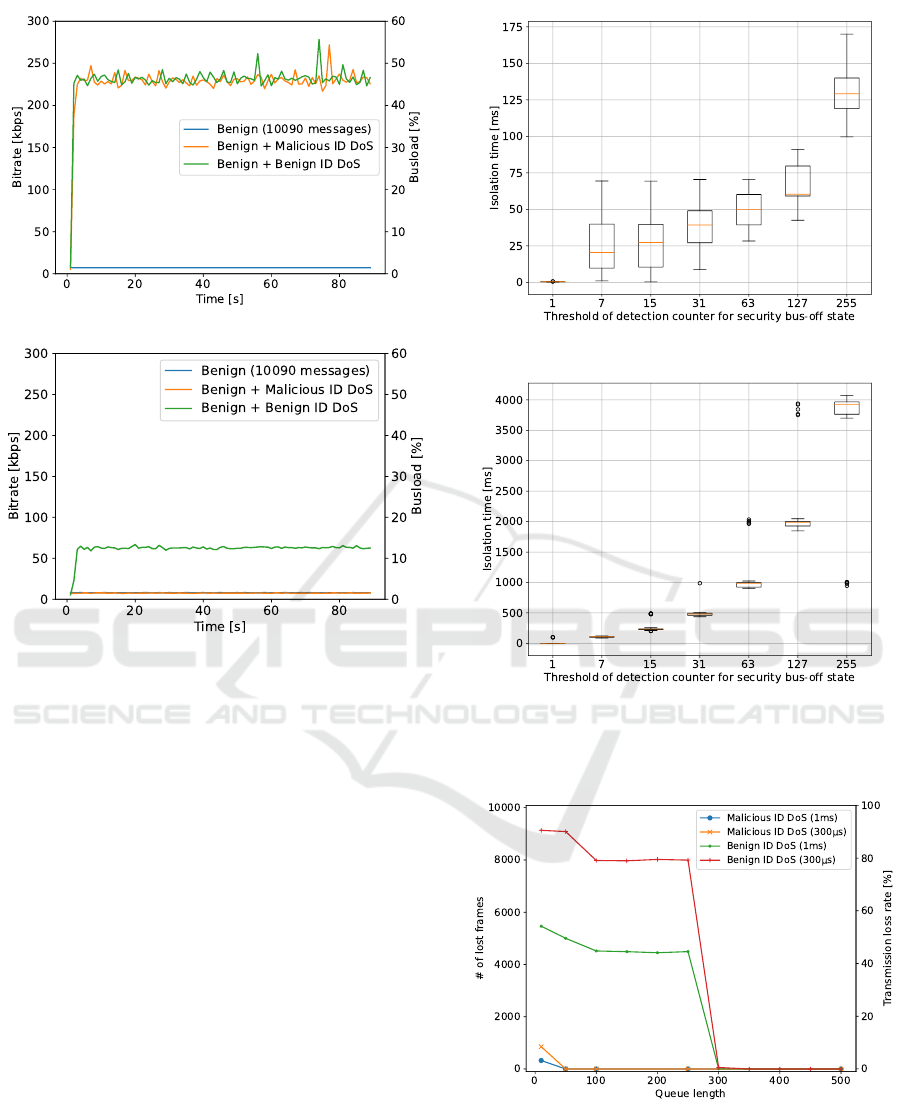
5.2 Prevention of DoS Attacks
At first, we evaluate the ability of IVNPROTECT to
prevent DoS attacks. To evaluate this ability, we made
Raspberry Pi 3 Model B both with and without IVN-
PROTECT, which simultaneously sends 10090 benign
messages and DoS attacks. We show the comparison
of busloads with and without IVNPROTECT in Fig.
4. As shown in Fig. 4 (a), in the case without IVN-
PROTECT, the busload reached over 45 % during DoS
attacks.
In contrast, as shown in Fig. 4 (b), we confirmed
that IVNPROTECT mitigated DoS attacks. Specif-
ically, in the case of sending benign messages and
malicious ID DoS simultaneously, there was no in-
crease in busload. It means that the allowlist-based
message discarding works against malicious ID DoS
effectively. Next, we describe the case of sending
benign messages and benign ID DoS. Since the al-
lowlist of IVNPROTECT includes the benign ID used
by the benign ID DoS, benign ID DoS passes the
allowlist-based message discarding. However, due
to the malignant similarity of transmission messages,
IVNPROTECT inserts a delay to mitigate flooding. As
shown in Fig. 4 (b), we confirm that the busload is re-
duced to about 12 % by inserting the delay.
Considering the busload of only benign messages
is about 1 %, IVNPROTECT allows the benign ID
DoS to increase the busload by 11 %. In general, the
busloads of the real-world CAN-buses are limited to
about 20 % in order to avoid unacceptable delays for
low-priority messages. Thus, when an attacker exe-
cutes benign ID DoS, the busload of real CAN-bus in-
creases up to 31 %. From this result, we conclude that
an attacker cannot achieve DoS attacks on the bus be-
cause the ECUs can send benign messages normally
with a busload of about 31 %.
5.3 Isolation Time
Next, we evaluate the isolation time, which expresses
from starts from the DoS attacks to isolation by IVN-
PROTECT. Like the previous experiment, we had the
Raspberry Pi 3 Model B send 10090 benign messages
and DoS attacks simultaneously. In Fig. 5, we show
the isolation times with different thresholds of the de-
tection counter for transferring the security bus-off
state. As shown in Fig. 5 (a), we confirm that the
maximum isolation time is 170 ms if the threshold is
255. And, as shown in Fig. 5 (b), we confirm that
the maximum isolation time is 4.073 s if the thresh-
old is 255. In other words, we conclude that there is
the time (170 ms and 4.073 s) to report some warning
messages for malicious and benign ID DoS, respec-
tively.
5.4 Benign Transmission Loss Rate
Under DoS Attacks
To ensure that IVNPROTECT can report the warning
messages, we evaluate the transmission loss rate of
ICISSP 2023 - 9th International Conference on Information Systems Security and Privacy
24
(a) Without IVNPROTECT.
(b) With IVNPROTECT.
Figure 4: Comparison of bitrate and busload between with
and without IVNPROTECT.
benign messages during DoS attacks. Fig. 6 shows
the benign transmission loss rate of IVNPROTECT
during DoS attacks.
The transmission loss rate is 0 % when the trans-
mission queue length is over 350. Thus, we set the
transmission queue length to 350 in the following
evaluations.
5.5 Benign Transmission Delay Under
DoS Attacks
To verify the number of messages that IVNPROTECT
can send during a DoS attack, we evaluate the trans-
mission delay of benign messages during DoS at-
tacks. Table 2 shows the arrival time of benign mes-
sages during various DoS attacks.
The benign traffic in Table 2 expresses the ar-
rival time of benign messages without sending DoS
attacks. The benign + malicious ID DoS (1ms) repre-
sents the arrival time of benign messages during ma-
licious DoS attacks, which send messages per 1 ms.
Similarly, benign + malicious ID DoS (300 µs) repre-
sents the arrival time of benign messages during ma-
(a) Malicious ID DoS.
(b) Benign ID DoS.
Figure 5: Isolation time under different thresholds of detec-
tion counter for security bus-off state.
Figure 6: Benign transmission (10090 messages) loss rate
under different tx queue size during DoS attacks.
licious DoS attacks (300 µs), which is the maximum
transmission rate.
Comparing benign with benign + malicious ID
DoS in Table 2, we confirm that IVNPROTECT does
IVNPROTECT: Isolable and Traceable Lightweight CAN-Bus Kernel-Level Protection for Securing in-Vehicle Communication
25
Table 2: Statistics of the arrival time of benign messages.
Traffic Mean Stddev Max
[ms] [ms] [ms]
benign 99.977 4.916 111.085
benign+malicious
99.977 4.709 111.146
ID DoS (1ms)
benign+malicious
ID DoS (300µs)
99.977 5.055 110.976
benign+benign
100.040 75.665 199.989
ID DoS (1ms)
benign+benign
ID DoS (300µs)
99.989 115.637 333.057
not affect the arrival time of benign messages during
malicious ID DoS. In contrast, in benign ID DoS, the
maximum delay of benign messages is 199.989 ms
and 333.057 ms. In other words, if IVNPROTECT iso-
lates compromised ECU at 333.057 ms after the oc-
currence of DoS attacks, IVNPROTECT can send at
least one message. Based on this evaluation, we de-
termine the optimal threshold for transferring security
bus-off state in 6.2.
5.6 Overhead with IVNPROTECT
In this section, we evaluate the overhead with IVN-
PROTECT. To evaluate the overhead, we considered
two cases: the Raspberry Pi 3 Model B sends 1000
benign messages with and without IVNPROTECT.
Then, we measured the average time between start-
ing to send a benign message and finishing it. As a
result, we observed that in the case without IVNPRO-
TECT, the average time was 20.090 193 ms, while in
the case with IVNPROTECT, it was 20.099 242 ms.
The overhead with IVNPROTECT is 9.049 µs, which
is less than the TEECheck’s (494 µs), so we confirm
that IVNPROTECT does not affect on benign mes-
sages.
6 DISCUSSION
6.1 Comparison Among Previous
Protections
In this section, we compare IVNPROTECT with previ-
ous protections. As described in Sec. 2.2, IVNPRO-
TECT has advantages in terms of unharming messages
on the bus when its protection is triggered unlike IDS-
side and on-bus protections.
Next, we compare IVNPROTECT with previous
ECU-side protections. Table 3 shows a comparison
among the ECU-side protections and IVNPROTECT.
As described in Sec. 2.2, the secure CAN transceiver
Table 3: Comparison among ECU-side protections in Isola-
bility, Traceability for Root-cause of Isolation (T.R.I.), De-
ployment Cost (D.C.), Harm for Benign Messages of legit-
imate ECUs (H.B.M.), Adaptation of Aperiodic Messages
(A.A.M.), benign Transmission Loss Rate during DoS at-
tacks (T.L.R.).
Elend et al. TEECheck IVNPROTECT
Isolability Partial Complete Complete
T.R.I. - Yes Yes
D.C. High Middle Low
H.B.M. Unharmful Unharmful Unharmful
A.A.M. Yes No Yes
T.L.R.
0% 0% 0%
proposed by Elend et al. (Elend and Adamson, 2017)
can be bypassed using some allowlisted messages
so it is effective only against malicious ID DoS at-
tacks. In addition, the secure CAN transceiver uses
the leaky-bucket algorithm to manipulate the sending
rate of CAN messages. And, it causes the transmis-
sion loss rate of benign messages during DoS attacks
to increases. Therefore, the secure CAN transceiver
cannot report warning messages to others ECUs on
the bus while being forced to send DoS attacks by an
attacker.
TEECheck (Mishra et al., 2020) proposed by
Mishra et al. has advantages regarding the complete
isolation of a compromised ECU, traceability of the
root cause of the bus-off state, and benign messages
that are not harmful. However, TEECheck can deploy
only to ARM-based ECUs, so it has the limitation of
deployability. Moreover, Mishra et al. assume that
ECUs with TEECheck send only periodic messages
as a real-time task model. In other words, TEECheck
cannot be deployed to ECUs which carry out aperi-
odic tasks. In CAN-bus, aperiodic tasks are gener-
ally implemented in real-world ECUs, which these
tasks are used to implement event-triggered tasks
such as airbag control. Therefore, we conclude that
TEECheck has a severe limitation of deployment for
ECUs with aperiodic tasks.
In contrast, our IVNPROTECT allows the aperi-
odic tasks to send the messages because the similar-
ity analysis-based detection module does not detect
the aperiodic messages as malicious messages (Ohira
et al., 2020). In addition, IVNPROTECT can be in-
stalled to an ECU just by software updating without
the limitation of hardware such as requiring Trust-
Zone. From the above comparison, IVNPROTECT
has advantages in isolability, deployability, and adap-
tation to aperiodic tasks.
ICISSP 2023 - 9th International Conference on Information Systems Security and Privacy
26

6.2 Warning Response Using
IVNPROTECT
For P3 described in Sec. 3.2, IVNPROTECT must
isolate the compromised ECU after reporting some
warning messages. To ensure this function work,
IVNPROTECT is required to satisfy the following re-
quirements:
1. A benign transmission loss rate of 0% during DoS
activities
2. A worst arrival time of benign messages, less than
isolation time by IVNPROTECT
3. A higher priority of warning messages than the
others IDs
As described in Sec. 5.4, we confirmed that IVN-
PROTECT satisfies the first requirement that the be-
nign transmission loss rate during DoS activities is
0 %. The second requirement depends on the thresh-
olds of the detection counter for transferring the se-
curity bus-off state. Specifically, the worst arrival
time of benign messages is 0.110976s and 0.333057s
for malicious and benign DoS attacks, respectively.
Hence, for the second requirement, IVNPROTECT
must isolate the compromised ECU after these times
when starting attacks. From the evaluation of isola-
tion time (Sec. 5.3), IVNPROTECT can satisfy the
requirement if the thresholds of ID violation error
and similarity error are 255 and 31, respectively. Fi-
nally, we discuss the third requirement that the ID of
warning messages requires a higher priority than the
other IDs on the bus. To prevent conflicting the warn-
ing messages and the other messages, IVNPROTECT
must send the warning messages with the highest pri-
ority ID on the bus. Fortunately, we easily solve this
problem because such IDs generally exist in the real-
world CAN-bus. For example, since the highest ID of
our lab’s vehicle is 0x020, we can use the IDs over
0x020 as warning messages.
We conclude that IVNPROTECT can report the
warning messages during DoS attacks if the thresh-
olds of ID violation error and similarity error are 255
and 31 and the ID of warning messages is higher than
the other messages on the bus.
6.3 Limitation
In this section, we elaborate on the limitation of IVN-
PROTECT. IVNPROTECT can detect malicious ID
DoS and benign ID DoS by allowlist and similarity
analysis. The similarity analysis module detects the
DoS attacks if the similarity of CAN messages ex-
ceeds a benign range defined by σ
s
. So, if an at-
tacker tries to manipulate the similarity of DoS attacks
without exceeding the benign range, IVNPROTECT
misses the DoS attacks to the CAN-bus. It causes a
high busload of the CAN-bus and unexpected vehi-
cle behavior (e.g., disabling power steering, blocking
ADAS function). We define this evasion DoS attack
against IVNPROTECT as similarity-manipulation at-
tacks.
Fortunately, we can mitigate this attack with a
well-architected assignment of the CAN IDs in prac-
tice. Specifically, we assign the low-priority CAN IDs
to an exploitable ECU that has a wireless connection
and IVNPROTECT. And, we assign the higher pri-
ority CAN ID than the exploitable ECU to the other
important ECUs. In consequence, an attacker can-
not deny the benign CAN messages using similarity-
manipulation attacks because the DoS attack con-
sists of the low-priority CAN IDs. However, to de-
ploy the well-architected assignment of CAN IDs
to real-world CAN-buses, automotive manufacturers
may have to change the existing assignment of CAN
IDs.
7 CONCLUSION
In this paper, we proposed isolable and traceable
lightweight CAN-bus kernel-level protection called
IVNPROTECT, which has advantages such as de-
ployability and slight overhead compared with previ-
ous CAN-bus protections. To allow the other ECUs
to trace the root cause of isolation of compromised
ECU, IVNPROTECT has a reporting function to send
warning messages while an attacker is compromising.
Moreover, we confirmed that this reporting function
of IVNPROTECT works even during a DoS attack.
In our future work, we will try to implement a host-
based intrusion detection module to IVNPROTECT,
which IVNPROTECT can prevent the attacker’s activ-
ities before starting some attacks. Finally, since there
is not much research on protection for attacking CAN
yet, we hope that our kernel-level protection will en-
courage this research field.
REFERENCES
Elend, B. and Adamson, T. (2017). Cyber Security Enhanc-
ing CAN Transceivers. In Proceedings of the 16th In-
ternational CAN Conference.
Groza, B., Popa, L., Murvay, P.-S., Elovici, Y., and Shabtai,
A. (2021). {CANARY}-A Reactive Defense Mech-
anism for Controller Area Networks based on Active
RelaYs. In Proceedings of the 30th USENIX Security
Symposium (USENIX Security 21), pages 1–18.
IVNPROTECT: Isolable and Traceable Lightweight CAN-Bus Kernel-Level Protection for Securing in-Vehicle Communication
27

Guilbon, J. (2018). Attacking the ARM’s TrustZone. https:
//blog.quarkslab.com/attacking-the-arms-trustzone.
html. (Accessed on 02/17/2022).
Humayed, A. and Luo, B. (2017). Using ID-Hopping to
Defend against Targeted DoS on CAN. In Proceed-
ings of the 1st International Workshop on Safe Control
of Connected and Autonomous Vehicles, pages 19–26.
ACM.
Kneib, M. and Huth, C. (2018). Scission: Signal
Characteristic-Based Sender Identification and Intru-
sion Detection in Automotive Networks. In Proceed-
ings of the 2018 ACM SIGSAC Conference on Com-
puter and Communications Security (CCS), pages
787–800. ACM.
Kneib, M., Schell, O., and Huth, C. (2020). EASI: Edge-
Based Sender Identification on Resource-Constrained
Platforms for Automotive Networks. In Proceedings
of the 27th Network and Distributed System Security
Symposium (NDSS), pages 1–16.
Kurachi, R., Matsubara, Y., Takada, H., Adachi, N.,
Miyashita, Y., and Horihata, S. (2014). CaCAN-
Centralized Authentication System in CAN (Con-
troller Area Network). In 14th Int. Conf. on Embedded
Security in Cars (ESCAR 2014).
Linux-Foundation (2019). Automotive Grade Linux.
https://www.automotivelinux.org/. (Accessed on
07/08/2019).
Machiry, A., Gustafson, E., Spensky, C., Salls, C.,
Stephens, N., Wang, R., Bianchi, A., Choe, Y. R.,
Kruegel, C., and Vigna, G. (2017). BOOMERANG:
Exploiting the Semantic Gap in Trusted Execution En-
vironments. In NDSS.
Marchetti, M. and Stabili, D. (2017). Anomaly Detection
of CAN Bus Messages through Analysis of ID Se-
quences. In 2017 IEEE Intelligent Vehicles Sympo-
sium (IV), pages 1577–1583. IEEE.
Miller, C. and Valasek, C. (2015). Remote Exploitation
of An Unaltered Passenger Vehicle. Black Hat USA,
2015:1–91.
Mishra, T., Chantem, T., and Gerdes, R. (2020).
TEECheck: Securing Intra-Vehicular Communication
Using Trusted Execution. In Proceedings of the 28th
International Conference on Real-Time Networks and
Systems (RTNS), pages 128–138.
Müter, M., Groll, A., and Freiling, F. C. (2010). A Struc-
tured Approach to Anomaly Detection for In-Vehicle
Networks. In 2010 Sixth International Conference on
Information Assurance and Security, pages 92–98.
Nie, S., Liu, L., and Du, Y. (2017). Free-Fall: Hacking
Tesla from Wireless to CAN Bus. Black Hat USA,
2017:1–16.
Ohira, S., Araya, K. D., Arai, I., and Fujikawa, K. (2021).
PLI-TDC: Super Fine Delay-Time Based Physical-
Layer Identification with Time-to-Digital Converter
for In-Vehicle Networks. In Proceedings of the 2021
ACM Asia Conference on Computer and Communica-
tions Security (ASIACCS), pages 1–11. ACM.
Ohira, S., Araya, K. D., Arai, I., Inoue, H., and Fujikawa,
K. (2020). Normal and Malicious Sliding Windows
Similarity Analysis Method for Fast and Accurate IDS
against DoS Attacks on In-Vehicle Networks. IEEE
Access, 8:42422–42435.
Pesé, M. D., Schauer, J. W., Li, J., and Shin, K. G. (2021).
S2-CAN: Sufficiently Secure Controller Area Net-
work. In Proceedings of the 37th Annual Computer
Security Applications Conference (ACSAC), ACSAC,
page 425–438, New York, NY, USA. Association for
Computing Machinery.
Robert-Bosch-GmbH (1991). CAN Specification Version
2.0. http://esd.cs.ucr.edu/webres/can20.pdf. (Ac-
cessed on 07/08/2019).
Sivakumar, P., Devi, R. S., Lakshmi, A. N., VinothKumar,
B., and Vinod, B. (2020). Automotive grade linux
software architecture for automotive infotainment sys-
tem. In 2020 International Conference on Inventive
Computation Technologies (ICICT), pages 391–395.
IEEE.
Song, H. M., Kim, H. R., and Kim, H. K. (2016). Intru-
sion Detection System Based on the Analysis of Time
Intervals of CAN Messages for In-Vehicle Network.
In 2016 international conference on information net-
working (ICOIN), pages 63–68. IEEE.
Takada, M., Osada, Y., and Morii, M. (2019). Counter At-
tack against the Bus-off Attack on CAN. In 2019 14th
Asia Joint Conference on Information Security (Asia-
JCIS), pages 96–102. IEEE.
Woo, S., Moon, D., Youn, T.-Y., Lee, Y., and Kim, Y.
(2019). CAN ID Shuffling Technique (CIST): Mov-
ing Target Defense Strategy for Protecting In-Vehicle
CAN. IEEE Access, 7:15521–15536.
Wu, W., Huang, Y., Kurachi, R., Zeng, G., Xie, G., Li, R.,
and Li, K. (2018a). Sliding Window Optimized Infor-
mation Entropy Analysis Method for Intrusion Detec-
tion on In-Vehicle Networks. IEEE Access, 6:45233–
45245.
Wu, W., Kurachi, R., Zeng, G., Matsubara, Y., Takada,
H., Li, R., and Li, K. (2018b). IDH-CAN: A
Hardware-Based ID Hopping CAN Mechanism With
Enhanced Security for Automotive Real-Time Appli-
cations. IEEE Access, 6:54607–54623.
ICISSP 2023 - 9th International Conference on Information Systems Security and Privacy
28
