
A Deep Neural Network-Based Higher Performance Error Prediction
Algorithm for Reversible Data Hiding
Bin Ma
1,2
, Dongqi Li
1,2
, Ruihe Ma
3
and Linna Zhou
4*
1
Department of Computer Science and Technology, Qilu University of Technology (Shandong Academy of Sciences), Jinan,
China
2
Shandong Provincial Key Laboratory of Computer Network, Jinan, China
3
Department of Economics, Jilin University, Changchun, China
4
Department of Cyber Security, Beijing University of Posts and Telecommunications, Peking, China
Keywords: Inception structure; Efficient channel attention; Residual network; Error prediction
Abstract: The traditional error prediction algorithm uses one or more neighboring pixels to linearly predict the target
pixel, and it is difficult to use all the information around the original pixel, which affects the prediction
performance of the predictor for the target pixel. In this paper, a reversible information hiding error
prediction algorithm based on depth neural network is proposed and target images with high prediction
accuracy are jointly trained by Inception network, ECA network and residual network. This algorithm
extracts the feature images of different receptive fields by using the Inception network, and adds the ECA
network after the Inception network to enhance the expression of the important information of the feature
images on the high-dimensional channel; at the same time, a residual network structure is added between the
Inception network and the ECA network. The feature images of different dimensions of the original image
are transmitted to the ECA network, which improves the prediction ability of the target pixel and the
convergence speed of the network, and enhances the stability of the network. The algorithm evaluation
results using ImageNet database show that the convolutional neural network based on Inception structure
has stronger predictive ability compared with the classical error prediction algorithm and other latest
research schemes.
1 INTRODUCTION
Since Barton (Barton, 1997) first proposed the
reversible data hiding method in the patent, so far,
the RDH method has been widely developed. The
methods proposed by many researchers can be
divided into two categories. The first category is to
reduce the embedding distortion by improving the
embedding method. Tian (Tian, 2003) proposed a
high-capacity DRH method of differential expansion.
Ni et al. (Zhicheng Ni et al., 2006) proposed an
RDH method based on histogram translation, which
exploits the zero or minimum points of the image
histogram and slightly modifies the pixel gray value
to embed the data into the image. Thodi et al. (Thodi
and Rodriguez, 2007) proposed a histogram shifting
technique as an alternative to embedding position
maps, which improved the distortion performance at
low embedding capacities and alleviated the
capacity control problem, and also proposed a
technique called prediction error Extended
Reversible Data Embedding Technique. This new
technique exploits the inherent correlation in pixel
neighborhoods better than the differential expansion
scheme. Ma et al. (Ma and Shi, 2016) proposed a
CDM-based reversible data hiding. Weinberger et al.
(Weinberger et al., 2000) proposed a low-
complexity median edge prediction algorithm
(MEDP). The other is to improve the prediction
accuracy by designing high-precision predictors.
Fallahpour (Fallahpour, 2008) proposed a lossless
data hiding method based on the Gradient Adaptive
Prediction (GAP) method. Sachnev et al. (Sachnev
et al., 2009) proposed an RDH scheme based on
diamond interleaved prediction.
Although these prediction methods all utilize the
correlation of adjacent pixels in space, they are all
local and linear, and the prediction accuracy of some
complex images needs to be improved. Therefore, it
is valuable to study a global and nonlinear
788
Ma, B., Li, D., Ma, R. and Zhou, L.
A Deep Neural Network-Based Higher Performance Error Prediction Algorithm for Reversible Data Hiding.
DOI: 10.5220/0012053800003612
In Proceedings of the 3rd International Symposium on Automation, Information and Computing (ISAIC 2022), pages 788-794
ISBN: 978-989-758-622-4; ISSN: 2975-9463
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

forecasting method to improve forecasting accuracy.
With the development of deep learning,
convolutional neural networks have been used in
image segmentation (Lang et al., 2022; Zhou et al.,
2021), super-resolution (Yue et al., 2022), natural
language processing (Dong et al., 2015), resolution
enhancement (Liang et al., 2022),information
hidingand and other fields. extensive development.
In the field of information hiding, Luo et al. [30]
proposed a CNN-based stereo image RDH method
that exploits the correlation of left and right views in
stereo images to predict each other. Hu (Hu and
Xiang, 2021), et al. proposed a prediction method
based on CNN to predict grayscale images, using
two steps of feature extraction (for multi-receptive
fields) and image prediction (for global optimization)
to achieve target pixel prediction, which is similar to
the classic one. Compared with the predictor, it has
better prediction performance.
The main contributions of this paper are as
follows:
(1) A multi-convolution combination model
based on the Inception structure is proposed, which
extracts image features in a multi-scale parallel
manner through convolution kernels of different
sizes, making full use of the correlation between
adjacent pixels in the image space.
(2) A channel attention model for cross-local
channel interaction is proposed. An adaptive one-
dimensional convolution kernel is used to determine
the coverage of cross-channel interaction. By
learning the weights between different channels, the
weights of important channels are enhanced.
Channel attention cross-channel interaction
capability.
(3) An optimization model of adding residual
network between Inception modules is proposed. By
using skip connections inside the network, the
problem of learning degradation of deep networks is
solved, the convergence speed of the network is
accelerated, and the learning ability of the network is
enhanced.
2 RELATED WORK
2.1 Basic structure of GoogLeNet
GoogLeNet was first proposed by Szegedy et
al., improving the performance of deep neural
networks by increasing the depth and width of the
network often results in two problems (Szegedy et
al., 2015). First, under the condition that the training
set is limited, using a large size usually results in an
increased amount of parameters, making the
enlarged network prone to overfitting; second,
expanding the size of the network results in a
substantial increase in the use of computing
resources. In order to solve the above two problems,
the full connection is transformed into a sparse
connection structure.
2.2 Basic structure of ECA-Net
Convolutional neural networks extract features
by fusing spatial and channel information together
within local receptive fields. Wang et al. proposed
an Efficient Channel Attention (ECA) network
(Wang et al., 2020).
2.3 Basic structure of Res-Net
Most of the previous models improved the
performance of the network by increasing the depth.
However, deeper networks often create problems
with vanishing gradients and difficulty in training.
He et al. proposed a residual learning framework to
address network degradation, which is able to
simplify previous complex deep networks (He et al.,
2016).
3 ERROR PREDICTION
ALGORITHM BASED ON
DEPTH NEURAL NETWORK
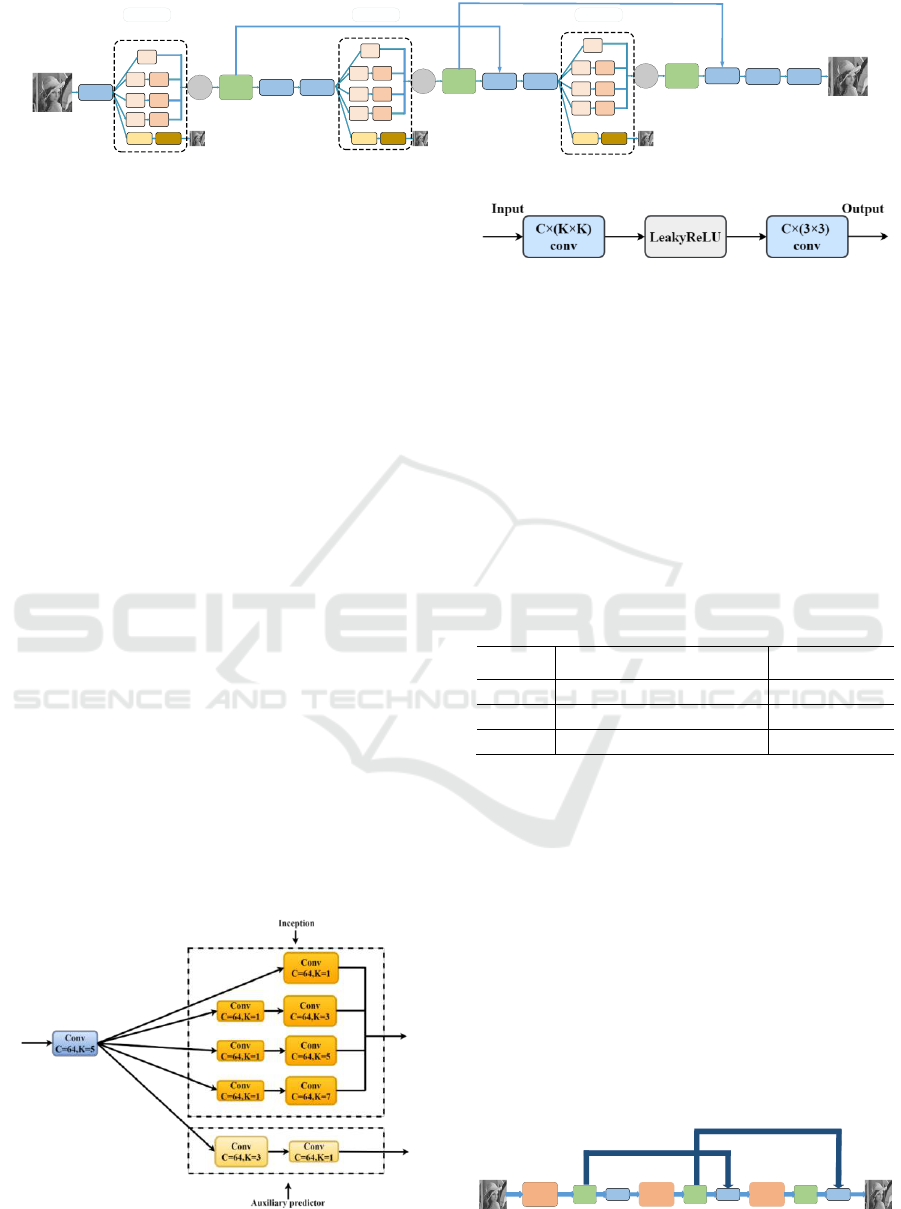
The convolutional neural network of the
Inception structure is a sparse structure that can
efficiently express features. It can extract image
feature information by using convolution kernels of
different sizes. Small convolution kernels are used in
areas with dense information distribution and strong
correlation, and small convolution kernels are used
in areas with sparse information distribution.
Regions with weak correlation use large convolution
kernels. Therefore, this study proposes a
convolutional neural network algorithm based on the
Inception structure. By optimizing the Inception
network structure, the Inception structure can obtain
different receptive field ranges and can extract the
important features of the original image in space;
accurate predictions. The basic model of the
convolutional neural network based on the Inception
structure consists of three sub-networks: Inception
network, ECA-Net, and residual network (as shown
in Figure 1).
A Deep Neural Network-Based Higher Performance Error Prediction Algorithm for Reversible Data Hiding
789
Conv
K=5
Conv
K=1
Conv
K=1
Conv
K=1
Conv
K=1
Conv
K=3
Conv
K=5
Conv
K=7
CAT
ECA-Net
Inception A
Conv
K=3
Conv
K=3
Conv
K=1
Conv
K=5
Conv
K=1
Conv
K=1
Conv
K=1
Conv
K=1
Conv
K=3
Conv
K=5
Conv
K=7
CAT
ECA-Net
Inception B
Conv
K=3
Conv
K=3
Conv
K=1
Conv
K=5
Conv
K=1
Conv
K=1
Conv
K=1
Conv
K=1
Conv
K=3
Conv
K=5
Conv
K=7
CAT
ECA-Net
Inception C
Conv
K=3
Conv
K=3
Conv
K=1
Conv
K=3
Conv
K=3
Figure 1: Algorithm architecture based on deep neural network structure.
3.1 Design of Convolutional Neural
Network Based on Inception
Structure
3.1.1 Inception network structure
In the convolutional neural network based on
the Inception structure, the role of Inception is to
extract spatial feature information from the original
image. Three streamlined Inception module layers
are designed in the Inception network in this study.
As shown in Figure 2, convolution layers of
different sizes are designed inside the Inception
module. Each layer of convolution includes image
convolution (Conv2d), activation (LeakRelu), and
image convolution (Conv2d) three data operations to
expand the range of image feature extraction. The
convolutional structure of each layer is shown in
Figure 3. By adjusting the size of the convolution
kernel, different receptive field ranges are obtained,
and finally, images with different scale features are
spliced in the channel dimension. After the original
image is extracted with the initial image features
with a convolution kernel size of 5 × 5, the
convolution kernel sizes of the Inception structure
are respectively 1 × 1, 3 × 3, 5 × 5, and 7 × 7. The
first, second, and third, four convolutional layers,
and the second, third, and fourth convolutional
layers all have 1×1 convolution operations.
Figure 2: Inception module.
Figure 3: The size of the convolution kernel K in the
Inception module is 1, 3, 5, and 7 convolution layer
structures
3.1.2 ECA network structure
ECA-Net first uses the global average pooling
operation without dimensionality reduction to
aggregate features, and uses an adaptive strategy to
determine the convolution kernel size K according to
the number of channels to achieve local cross-
channel interaction, then perform one-dimensional
convolution, and finally use the sigmoid activation
function to learn channel attention. Table 1 shows
the detailed parameter settings of ECA-Net.
Table 1: Detailed parameters of ECA-Net network.
Model
Network layer function
Set
ECA 1
Avg_pool,Conv1d,sigmod
256;[5,1,2]
ECA 2
Avg_pool,Conv1d,sigmod
256;[5,1,2]
ECA 3
Avg_pool,Conv1d,sigmod
256;[5,1,2]
3.1.3 Residual network
In this study, by adding a residual network with
a skip layer connection between the Inception
network and the ECA network, the image features
extracted by the Inception network output layer
through the ECA-Net layer are linked to the next
Inception network output layer after ECA-Net (the
first, two, and three Inception module output
features are connected to the second and third ECA-
Net respectively) to fuse the shallow feature
information with the deep features, as shown in
Figure 4, improve the performance of the
convolutional neural network based on the Inception
structure, and speed up the convergence.
ECA-Net Conv ECA-Net Conv ECA-Net Conv
Inception A Inception A Inception A
Figure 4: Schematic diagram of the jump-layer connection
enhanced network.
ISAIC 2022 - International Symposium on Automation, Information and Computing
790

3.2 Loss function
The core of the convolutional neural network
algorithm based on the Inception structure is to
predict the target image based on the Inception
network, ECA-Net, and residual network. Different
from the standard Inception structure, in the
convolutional neural network based on the Inception
structure: on the one hand, the range of the receptive
field is expanded by deepening the network depth
inside the Inception structure, adding auxiliary
predictors in parallel with the Inception structure and
adding jumps between Inception modules
Connections help to better learn image information
and speed up the convergence of the network. On
the other hand, ECA-Net improves the
representation of feature images on important
channels by weighting the important channels. In
this study, the loss function of the convolutional
neural network based on the Inception structure is
designed as:
~
2
1
1
( - I )
D
main t o
i
loss I
D
=
=
(1)
oss = ( 1 + 2 + 3)L loss loss loss loss+
(2)
In formula (1),
D
represents the number of
images,
~
o
I
is the output image,
is the target
image. In formula (2), loss indicates that the loss
function of the backbone network is composed of
MSE loss, loss1, 2, and 3 indicate the losses of the
first, second, and third auxiliary predictors,
respectively. Assigning smaller weights and
achieving feature fusion in the final loss can help the
network achieve better predictions for the target
image. The final loss function is the sum of the loss
functions of the backbone and branch networks.
4 EXPERIMENTAL STUDY
4.1 Experimental configuration
In order to verify the performance of the
Inception-based convolutional neural network, 3100
images are randomly selected from the ImageNet
dataset as experimental data in this experiment. First,
the original image is grayscaled, and the grayscale
image is resized to 512×512 by bilinear interpolation.
The experiment uses the PyTorch framework to
implement the convolutional neural network
prediction algorithm based on the Inception structure.
All experiments are performed on a Dell R740
graphics workstation configured with Intel Gold
5218 CPU, 64GB RAM, and NVIDIA A4000 16G
VRAM.
4.2 Evaluation indicators
The prediction performance of the network can
be reflected by comparing the similarity between the
predicted image and the target image. In the
experiment, the mean square error, variance, mean,
and prediction error were used as the performance of
the prediction network.
Mean Squared Error (MSE) represents the
mean squared error between the predicted image and
the target image. MSE is calculated as:
11
2
00
1
[ ( , ) ( , )]
mn
ij
MSE I i j I i j
mn
−−
==
=−
(3)
Variance is used to represent the degree of
deviation of the forecast error from the mean of the
forecast error.
2
2
()x
N
−
=
(4)
The mean represents the mean of prediction
errors.
4.3 Research on the performance of
convolutional neural network
algorithm based on Inception
structure
4.3.1 Effect of different numbers of
Inception structures on prediction
performance
The bottom layer of the convolutional neural
network extracts the local features of the image
through convolution. In the local area with weak
correlation, a large convolution kernel is used for
learning, and in the local area with strong correlation,
a small convolution kernel is used for learning.
information fusion to obtain a better representation
of the image.
In the experiment, different numbers (0, 1, 2, 3)
of deep neural network modules were used to verify
the performance of the convolutional neural network
algorithm based on the Inception structure. The
experimental results are shown in Table 3. After
adding the Inception module, the similarity between
the predicted image and the target image is further
improved. The results show that the predicted pixels
generated by the convolutional neural network based
A Deep Neural Network-Based Higher Performance Error Prediction Algorithm for Reversible Data Hiding
791
on Inception structure have strong similarity with the
target pixels, and the difference between the
predicted image and the target image generated after
adding three Inception modules is the smallest.
Table 2: Prediction performance results for different
numbers of Inception structures.
0
1
2
3
Mse
47.6952
47.0069
52.7191
46.3105
Mean
0.1227
0.0759
0.0760
0.07942
Variance
47.6792
46.9971
52.7079
44.5419
4.3.2 Influence of Inception structure with
different λ weights on prediction
performance
In the experiment, MSE losses with different
intensity coefficients (0.1, 0.2, 0.3, 0.5, 0.7, 0.9)
were selected to verify the performance of deep
neural network structure. The experimental results
are shown in Table 3. The experimental results are
shown in Table 4. When λ is 0.2, MSE and Variance
are the smallest, followed by Mean, and the
generated predicted image has the highest similarity
with the target image, that is, the convolutional
neural network based on Inception structure has
good prediction performance.
Table 3: Effect of different λ weights on prediction
performance.
0.1
0.2
0.3
0.5
0.7
0.9
Mse
43.6
333
42.8
444
46.1
708
46.6
084
47.8
908
46.7
753
Mean
0.03
268
0.03
276
0.03
80
0.33
31
0.21
86
0.13
52
Varia
nce
43.6
284
42.8
339
45.9
950
46.4
883
47.8
151
46.7
498
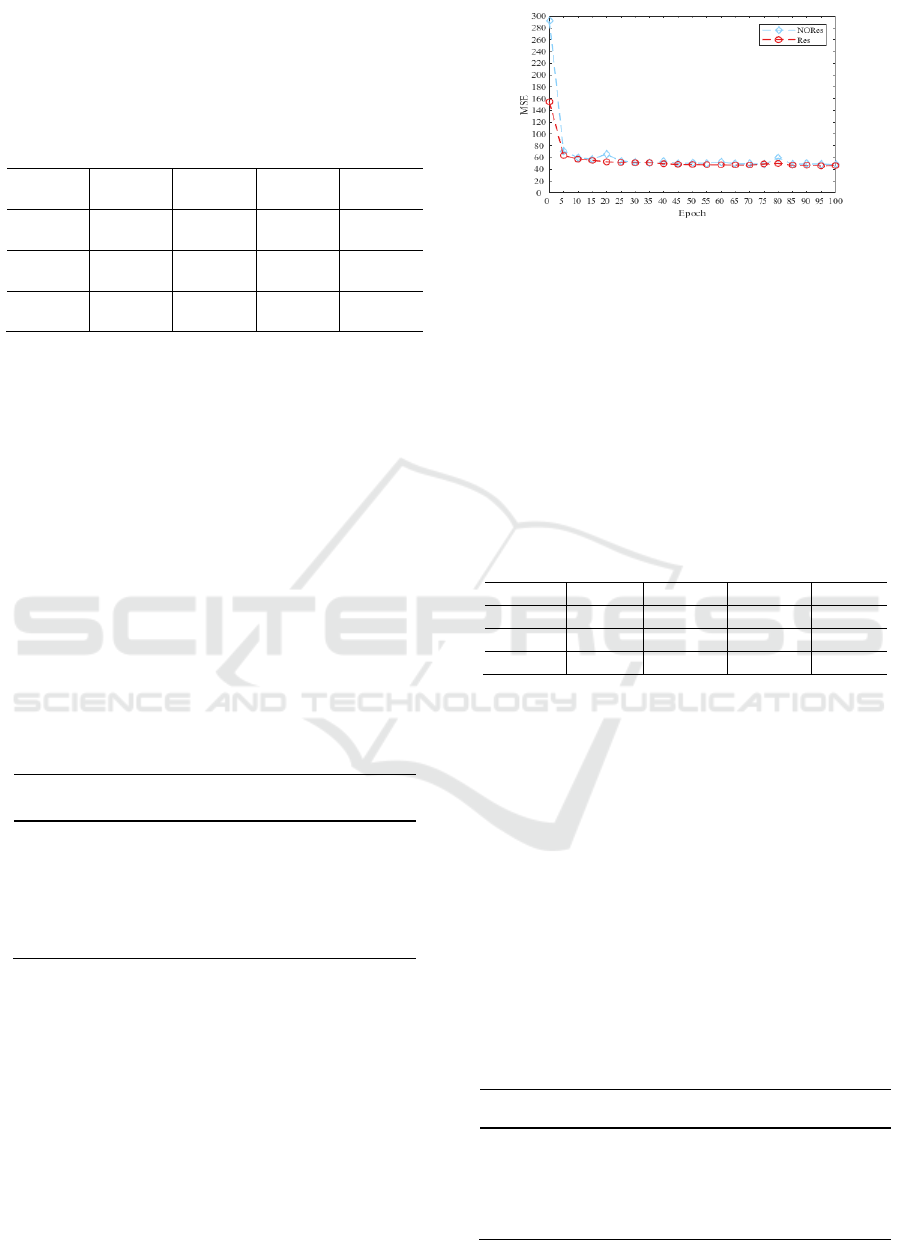
4.3.3 Influence of residual network on
prediction performance
MSE is used in experiments to compare and
evaluate the image prediction performance of depth
convolution neural network based on Incept
structure. It can be seen from Figure 5 that for the
target image, the predicted image generated by the
depth convolution neural network based on the
residual network has faster convergence speed and
stronger stability. improved.
Figure 5: Influence of residual network on prediction
performance.
4.3.4 Influence of Eca-Net Network on
Prediction Performance
To explore the impact of different numbers of
Eca-Net on prediction performance, the
experimental results are shown in Table 4. After
adding three Eca Net, the prediction accuracy
reaches the highest. Mse, Mean and Variance are
42.8444, 0.0328 and 42.8339 respectively.
Table 4: Influence of Different Eca Net Quantities on
Prediction Accuracy.
0
1
2
3
Mse
47.4255
45.0885
47.1813
42.8444
Mean
0.6650
0.2088
0.1893
0.0328
Variance
46.935
45.0369
47.1342
42.8339
4.4 Comparison of prediction
performance among different methods
Most of the traditional prediction methods use
linear methods to predict image pixels in the local
area of target pixels. These prediction methods make
full use of the correlation between adjacent pixels in
space to predict target pixels. In the experiment, the
mean square error, variance, mean value, and
prediction error were used to compare and analyze
the prediction performance of the algorithm
proposed in this paper and other algorithms on the
target image. The experimental results are shown in
Table 5.
Table 5: Comparison of prediction performance without
predictor in Mse, Absolute Mean, and Variance.
DP
MEDP
GAP
BIP
CNN
P
Propo
sed
Mse
280.5
058
214.755
4
394.5
430
127.2
638
47.69
52
42.84
44
Mean
0.001
1
0.4147
1.094
9
0.615
4
0.122
7
0.032
76
Varia
nce
280.4
984
214.531
0
393.1
429
126.6
566
47.67
92
42.83
39
ISAIC 2022 - International Symposium on Automation, Information and Computing
792

5 CONCLUSION
In this paper, reversible data hiding error
prediction algorithm based on depth neural network
proposed to achieve target pixel prediction. This
algorithm makes full use of the correlation between
adjacent pixels to generate a prediction image with
high precision with the target image through the
Inception structure network and ECA network. At
the same time, by adding a residual network between
the inception networks, the algorithm integrates
feature information of different dimensions in the
process of network optimization, which enhances the
expressive ability of the deep neural network and
improves the convergence speed of the network.
ACKNOWLEDGEMENTS
This research presented in this work was supported
by the National Natural Science Foundation of
China (No: 62272255, 61872203), the National Key
Research and Development Program of China
(2021YFC3340600), the Shandong Province Natural
Science Foundation (ZR2019BF017,
ZR2020MF054), Major Scientific and Techno-
logical Innovation Projects of Shandong Province
(2019JZZY020127, 2019JZZY010132,
2019JZZY010201), Plan of Youth Innovation Team
Development of Colleges and Universities in Shan-
dong Province (SD2019-161), Jinan City ‘‘20
universities’’ Funding Projects(2020GXRC056 and
2019GXRC031), Jinan City-School Integration
Development Strategy Project (JNSX2021030).
REFERENCES
Barton, J.M., 1997. Method and apparatus for embedding
authentication information within digital data.
United States Patent, 5 646 997.
Dong, L., Wei, F., Zhou, M., Xu, K., 2015. Question
Answering over Freebase with Multi-Column
Convolutional Neural Networks. Presented at
the Natural Language Processing, Beijing, China,
pp. 260–269.
Fallahpour, M., 2008. Reversible image data hiding based
on gradient adjusted prediction. IEICE Electron.
Express 5, 870–876.
He, K., Zhang, X., Ren, S., Sun, J., 2016. Deep Residual
Learning for Image Recognition. Presented at
the 2016 IEEE Conference on Computer Vision
and Pattern Recognition (CVPR), IEEE, Las
Vegas, NV, USA, pp. 770–778.
Hu, R., Xiang, S., 2021. CNN Prediction Based Reversible
Data Hiding. IEEE Signal Process. Lett. 28,
464–468.
Lang, C., Cheng, G., Tu, B., Han, J., 2022. Learning What
Not to Segment: A New Perspective on Few-
Shot Segmentation.
Liang, J., Zeng, H., Zhang, L., 2022. Details or Artifacts:
A Locally Discriminative Learning Approach to
Realistic Image Super-Resolution.
Ma, B., Shi, Y.Q., 2016. A Reversible Data Hiding
Scheme Based on Code Division Multiplexing.
IEEE Trans.Inform.Forensic Secur. 11, 1914–
1927.
Sachnev, V., Hyoung Joong Kim, Jeho Nam, Suresh, S.,
Yun Qing Shi, 2009. Reversible Watermarking
Algorithm Using Sorting and Prediction. IEEE
Trans. Circuits Syst. Video Technol. 19, 989–
999.
https://doi.org/10.1109/TCSVT.2009.2020257
Szegedy, C., Liu, W., Jia, Y., Sermanet, P., Reed, S.,
Anguelov, D., Erhan, D., Vanhoucke, V.,
Rabinovich, A., 2015. Going deeper with
convolutions, in: Proceedings of the IEEE
Conference on Computer Vision and Pattern
Recognition. pp. 1–9.
Tian, J., 2003. Reversible data embedding using a
difference expansion. IEEE transactions on
circuits and systems for video technology 13,
890–896.
Wang, Q., Wu, B., Zhu, P., Li, P., Zuo, W., Hu, Q., 2020.
ECA-Net: Efficient Channel Attention for Deep
Convolutional Neural Networks.
Weinberger, M.J., Seroussi, G., Sapiro, G., 2000. The
LOCO-I lossless image compression algorithm:
principles and standardization into JPEG-LS.
IEEE Trans. on Image Process. 9, 1309–1324.
Yue, Z., Zhao, Q., Xie, J., Zhang, L., Meng, D., Wong, K.-
Y.K., 2022. Blind Image Super-resolution with
Elaborate Degradation Modeling on Noise and
Kernel. Presented at the 2022 IEEE/CVF
Conference on Computer Vision and Pattern
Recognition (CVPR), IEEE, New Orleans, LA,
USA, pp. 2118–2128.
Zhicheng Ni, Yun-Qing Shi, Ansari, N., Wei Su, 2006.
Reversible data hiding. IEEE Trans. Circuits
Syst. Video Technol. 16, 354–362.
https://doi.org/10.1109/TCSVT.2006.869964
Zhou, T., Wang, W., Liu, S., Yang, Y., Van Gool, L.,
2021. Differentiable Multi-Granularity Human
Representation Learning for Instance-Aware
A Deep Neural Network-Based Higher Performance Error Prediction Algorithm for Reversible Data Hiding
793

Human Semantic Parsing. Presented at the 2021
IEEE/CVF Conference on Computer Vision and
Pattern Recognition (CVPR), IEEE, Nashville,
TN, USA, pp. 1622–1631.
ISAIC 2022 - International Symposium on Automation, Information and Computing
794
