
A Novel Dual-Role Two Pursuers and Two Evaders Simple Motion Game
Pengfei Zhang, Peifeng Chen, Hao Zhang, Yiqun Zhang
∗
, Feng Song and Hongwei Lan
Beijing Institute of Electronic System Engineering, Beijing, 100854, China
Keywords:
Dual-Role, Two Pursuers Two Evaders, Simple Motion, Differential Games.
Abstract:
Multiple players pursuit evasion differential games are significant for the development of unmanned aircraft.
In this study, a two pursuers and two evaders game is to be investigated, of which the payoff function is the
instant when both the evaders are first time captured by the pursuers. The pursuers wish to minimize the
capture instant while the evaders have the opposite purpose. In this game, the positional coincidence of any
two players implies that the two players are destroyed. Different from previous literature, the players are
considered to have two roles, that is the evader has the role of escaping from the pursuer as well as the role
of pursuing the pursuer. To solve the problem, we first present the state feedback strategies of the pursuers.
Secondly, the payoff function and the best strategies of the evaders are deduced under the condition that the
evader does not intercept the pursuers. Thirdly, by contradiction, it is proved that the capture instant will be
decreased when the evaders try to intercept one of the pursuers. As a result, the underlying strategies are
equilibrium strategies.
1 INTRODUCTION
The topic of multi-player pursuit evasion games be-
comes popular due to the development of unmanned
artificial vehicles (Exarchos et al., 2015; Zhang et al.,
2022). In a multi-player pursuit evasion differential
game, the pursuers try to capture all the evaders while
the evaders act against being captured. Compared
with the one-one, multi-one and one-multi differen-
tial games, the underlying problem is more compli-
cated. The major reason is that the players should
be allocated so as to make it clear that which pursuer
pursuit which evader. Moreover, the allocation might
not be fixed in the whole game interval, for instance,
one pursuer might change the pursuing target. In real
combats, the evader can also act as the ”pursuer” to at-
tack the pursuers, thus forming a more intricate prob-
lem, which is of concern to this paper.
In regard to the simple motion differential games,
there have been extensive studies (Yan et al., 2019;
Garcia et al., 2017; Makkapati et al., 2018; Pachter
et al., 2020; Pachter et al., 2019; Sun et al., 2017;
Ibragimov et al., 2018). Issacs’ two cutters and fugi-
tive ship differential game where two faster pursuers
cooperate to capture a slower evader in minimum time
is a typical simple motion differential game (Isaacs,
1965). The Appolonius circle is often adopted to an-
alyze the simple motion differential games. In the
simple motion games, most of the optimal strategies
are moving straight. Garcia et.al (Garcia et al., 2017)
proposed a geometric approach for the Issacs’ two
cutters and fugitive ship game to obtain the solution.
In another publication (Garcia et al., 2019), Garcia
et.al studied the goal line two pursuers one evader
game, in which the evader aims at reaching a goal line
which is protected by the pursuers, showing that the
optimal strategies of the players are moving straight.
Pachter et.al (Pachter et al., 2019) also studied the is-
sue of two pursuers and one evader game. Moll et.al
(Von Moll et al., 2020) studied the mutiple-pursuer
and one evader border defense differential game, with
a geometric property-based approach. Pachter et.al
(Pachter et al., 2020) studied the multiple-pursuer and
one evader differential game. Sun et.al (Sun et al.,
2017) studied the multiple pursuers and one evader
game in dynamic flowfields. Chen et.al (Chen et al.,
2016) studied the multi-player game with one supe-
rior evader, providing a cooperative scheme for the
pursuers to shrink the encirclement. Alias et.al (Alias
et al., 2017) studied the simple motion pursuit eva-
sion game with many evaders and many pursuers sub-
ject to integral constraints, obtaining the conclusion
that the evasion is possible when the total resource
of the evaders is greater than that of the pursuers.
Ibragimov et.al (Ibragimov et al., 2018) studied the
simple motion differential game with many pursuers
674
Zhang, P., Chen, P., Zhang, H., Zhang, Y., Song, F. and Lan, H.
A Novel Dual-Role Two Pursuers and Two Evaders Simple Motion Game.
DOI: 10.5220/0012016100003612
In Proceedings of the 3rd International Symposium on Automation, Information and Computing (ISAIC 2022), pages 674-680
ISBN: 978-989-758-622-4; ISSN: 2975-9463
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
and many evaders with integral constraints and ex-
plicitly constructed the evasion strategies. Makkap-
ati et.al (Makkapati and Tsiotras, 2019) studied the
multi-player pursuit evasion problem with a dynamic
divide and conquer approach. In regard to the active
target defense games, Garcia et.al (Garc
´
ıa et al., 2015)
studied the simple motion game with a fast defender,
and the result showed that the optimal trajectories are
straight lines. For the same problem, Garcia et.al
(Garcia et al., 2018) developed the state-feedback op-
timal strategies. It has been proved that it is possi-
ble for several pursuers capture one evader with zero
miss, in which the control bounds of the players are
identical (Kumkov et al., 2017).
The aforementioned studies have investigated dif-
ferent kinds of simple motion games, including the
life line game, multiple pursuers one evader game,
multiple pursuers multiple evaders game and integral
constraint game. Rare works have considered the
many pursuers and many evaders game in which the
evader could attack the pursuer. For this sake, this
paper focuses on studying the underlying problem.
The approach is by providing the best strategies in ad-
vance, and checking whether intercepting the pursuer
by the evader could bring in benefit or not.
2 MATHEMATICAL
FORMULATION
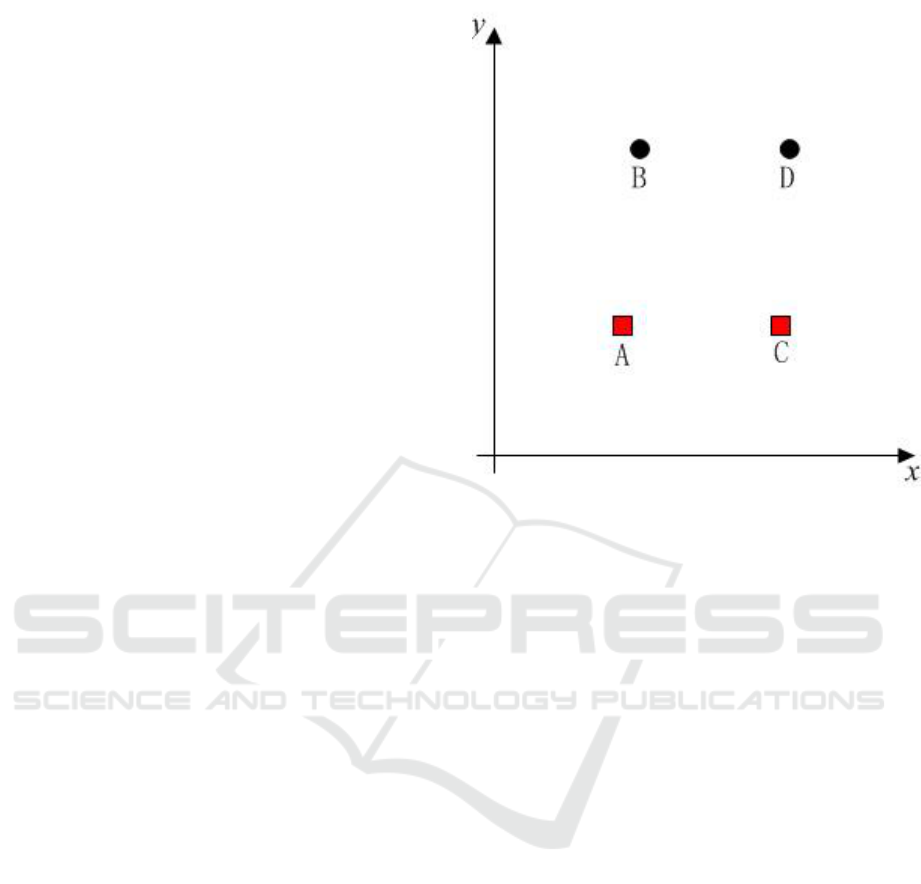
Four players move on a plane, marked by A, B, C and
D. Player A and C are the pursuers, player B and D
are the evaders, As depicted in Fig. 1.
The initial positions of the four players are de-
noted by r
A0
,r
B0
,r
C0
,r
D0
, respectively. The four
players have simple motion dynamics, the state equa-
tion are written as:
˙x
A
= v
A
cosθ
A
˙y
A
= v
A
sinθ
A
˙x
B
= v
B
cosθ
B
˙y
B
= v
B
sinθ
B
˙x
C
= v
C
cosθ
C
˙y
C
= v
C
sinθ
C
˙x
D
= v
D
cosθ
D
˙y
D
= v
D
sinθ
D
. (1)
where θ
A
, θ
B
, θ
C
, and θ
D
are the control variables
belong to the interval [0,2π).
For simplification, some new variables are intro-
Figure 1: Sketch of the two pursuers and the two evaders.
duced:
r
A
=
x
A
y
A
,v
A
=
v
A
cosθ
A
v
A
sinθ
A
r
B
=
x
B
y
B
,v
B
=
v
B
cosθ
B
v
B
sinθ
B
r
C
=
x
C
y
C
,v
C
=
v
C
cosθ
C
v
C
sinθ
C
r
D
=
x
D
y
D
,v
D
=
v
D
cosθ
D
v
D
sinθ
D
(2)
Based on Eq. (1) and Eq. (2), the state equation is
rewritten as:
˙
r
A
= v
A
˙
r
B
= v
B
˙
r
C
= v
C
˙
r
D
= v
D
(3)
In this problem, any two players are destroyed
when their positional coordinates coincides. Different
from the previous pursuit evasion games, the evaders
B and D in this game can also pursuit the pursuers
A and C. In other words, the pursuers and the evaders
have two roles. The evader is called captured when its
positional coordinate coincides with a pursuer. The
game ends when all the evaders are captured by the
pursuers. The purpose of the players A and C is to
capture the players B and D as soon as possible, while
the purpose of B and D is the opposite. We assume
that the magnitudes of the velocity vectors v
A
, v
B
, v
C
and v
D
satisfy v
A
> v
B
> v
C
> v
D
. By now, the game
is established and to be analyzed.
A Novel Dual-Role Two Pursuers and Two Evaders Simple Motion Game
675

3 GAME ANALYSIS WHEN THE
EVADERS DO NOT INTERCEPT
THE PURSUERS
In this section, the evaders do not intercept the pur-
suers, only playing the role of escaping from the pur-
suers. Since v
A
> v
B
> v
C
> v
D
, A has to capture B
while C has to capture D. The one-one game of A and
B is called sub-game 1; the one-one game of C and
D is called sub-game 2. Evidently, the equilibrium
strategies in the sub-game 1 and sub-game 2 are writ-
ten as:
(
v
∗
A
= v
A
r
B
−r
A
∥
r
B
−r
A
∥
2
v
∗
B
= v
B
r
B
−r
A
∥
r
B
−r
A
∥
2
,
(
v
∗
C
= v
C
r
D
−r
C
∥
r
D
−r
C
∥
2
v
∗
D
= v
D
r
D
−r
C
∥
r
D
−r
C
∥
2
(4)
The payoff functions, the capture instants, of sub-
game 1 and sub-game 2 are denoted as J
1
and J
2
,
respectively. Under the the equilibrium strategies
listed in Eq. (4), the capture instants of B and D are
J
1
(v
∗
A
,v
∗
B
) and J
2
(v
∗
C
,v
∗
D
), respectively. The payoff
function of the two-two game is denoted as J. Ob-
viously, J = max(J
1
,J
2
) when the evaders do not in-
tercept the pursuers.
Lemma 1: If the payoff function J of
the underlying two-two game is bigger than
max(J
1
(v
∗
A
,v
∗
B
),J
2
(v
∗
C
,v
∗
D
)), then player B must inter-
cept player C.
Proof: Based on the law of contrapositive, the
proposition is equivalent with ”Suppose that the
player B does not intercept the player C in the under-
lying two-two game, then the equilibrium strategies
are the same with sub-game 1 and sub-game 2, while
the J = max(J
1
(v
∗
A
,v
∗
B
),J
2
(v
∗
C
,v
∗
D
)).”
Since v
A
> v
B
> v
C
> v
D
, C cannot capture B for
B has a bigger velocity. Thereby, C has to capture D
and A has to capture B. In the case A and C take the
best strategy of sub-game 1 and-sub game 2, B and D
will make the payoff functions of sub-game 1 and sub-
game 2 decrease when taking non-optimal strategies,
implying that:
J (v
∗
A
,v
B
,v
∗
C
,v
D
) ≤ J (v
∗
A
,v
∗
B
,v
∗
C
,v
∗
D
) (5)
In the case B and D take the best strategies of sub-
game 1 and sub-game 2, A and C will make the the
payoff functions of sub-game 1 and sub-game 2 in-
crease when taking non-optimal strategies, implying
that:
J (v
∗
A
,v
∗
B
,v
∗
C
,v
∗
D
) ≤ J (v
A
,v
∗
B
,v
C
,v
∗
D
) (6)
From Eq. (5) and Eq. (6), it is concluded that
the best strategies of sub-game 1 and sub-game 2
are the equilibrium strategies while the game value
J = max(J
1
(v
∗
A
,v
∗
B
),J
2
(v
∗
C
,v
∗
D
)). This completes the
proof. ■
Another lemma about the time moment when B
intercepts C is given below.
Lemma 2: Under the best strategies of A and C
in sub-game 1 and sub-game 2, if the payoff function
J is bigger than max(J
1
(v
∗
A
,v
∗
B
),J
2
(v
∗
C
,v
∗
D
)), then the
player B must intercept the player C before C captures
D and A captures B.
Proof : The proposition can be proved by con-
tradiction. Suppose the player B intercepts C af-
ter C captures D, the capture time of B by A must
be less than or equal to J
1
(v
∗
A
,v
∗
B
), indicating that
J ≤ max(J
1
(v
∗
A
,v
∗
B
),J
2
(v
∗
C
,v
∗
D
)); Suppose the player
B intercepts C after A captures B, B is destroyed and
can not intercept C. Therefore, the player B must in-
tercept the player C before C captures D and A cap-
tures B, from which the proof is completed. ■
In summary, it is concluded that when A and C
adopt the best sub-game strategies, there is no possi-
bility for B and D to obtain a better result except that
B intercepts C earlier than C captures D and A cap-
tures B.
4 GAME ANALYSIS WHEN THE
EVADER INTERCEPT THE
PURSUER AT A TIME
The time moment when B captures C is denoted
as t
BC
, as depicted in Fig. 2. The positions
of the four players at time t
BC
are denoted as
r
A
(t
BC
),r
B
(t
BC
),r
C
(t
BC
),r
D
(t
BC
).
Lemma 3: If A and C adopt the best strategies of
the two sub-games, the following inequalities hold:
t
BC
≤
∥
r
A0
−r
B0
∥
2
v
A
−v
B
−
∥
r
A
(t
BC
)−r
B
(t
BC
)
∥
2
v
A
−v
B
t
BC
≤
∥
r
C0
−r
D0
∥
2
v
C
−v
D
−
∥
r
C
(t
BC
)−r
D
(t
BC
)
∥
2
v
C
−v
D
(7)
Proof : We only prove the inequality in the first
row, the second row can be proved by a similar argu-
ment.
Let:
ρ
2
= ⟨r
A
− r
B
,r
A
− r
B
⟩ (8)
Taking derivative of the two sides in Eq. (8):
˙
ρ = ⟨
r
A
− r
B
ρ
,v
A
⟩ − ⟨
r
A
− r
B
ρ
,v
B
⟩ (9)
By integrating Eq. (9):
ρ(t) − ρ (0) =
t
R
0
⟨
r
A
−r
B
ρ
,v
A
⟩dt −
t
R
0
⟨
r
A
−r
B
ρ
,v
B
⟩d t
↔
ρ(t) = ρ(0) +
t
R
0
⟨
r
A
−r
B
ρ
,v
A
⟩dt −
t
R
0
⟨
r
A
−r
B
ρ
,v
B
⟩d t
(10)
ISAIC 2022 - International Symposium on Automation, Information and Computing
676
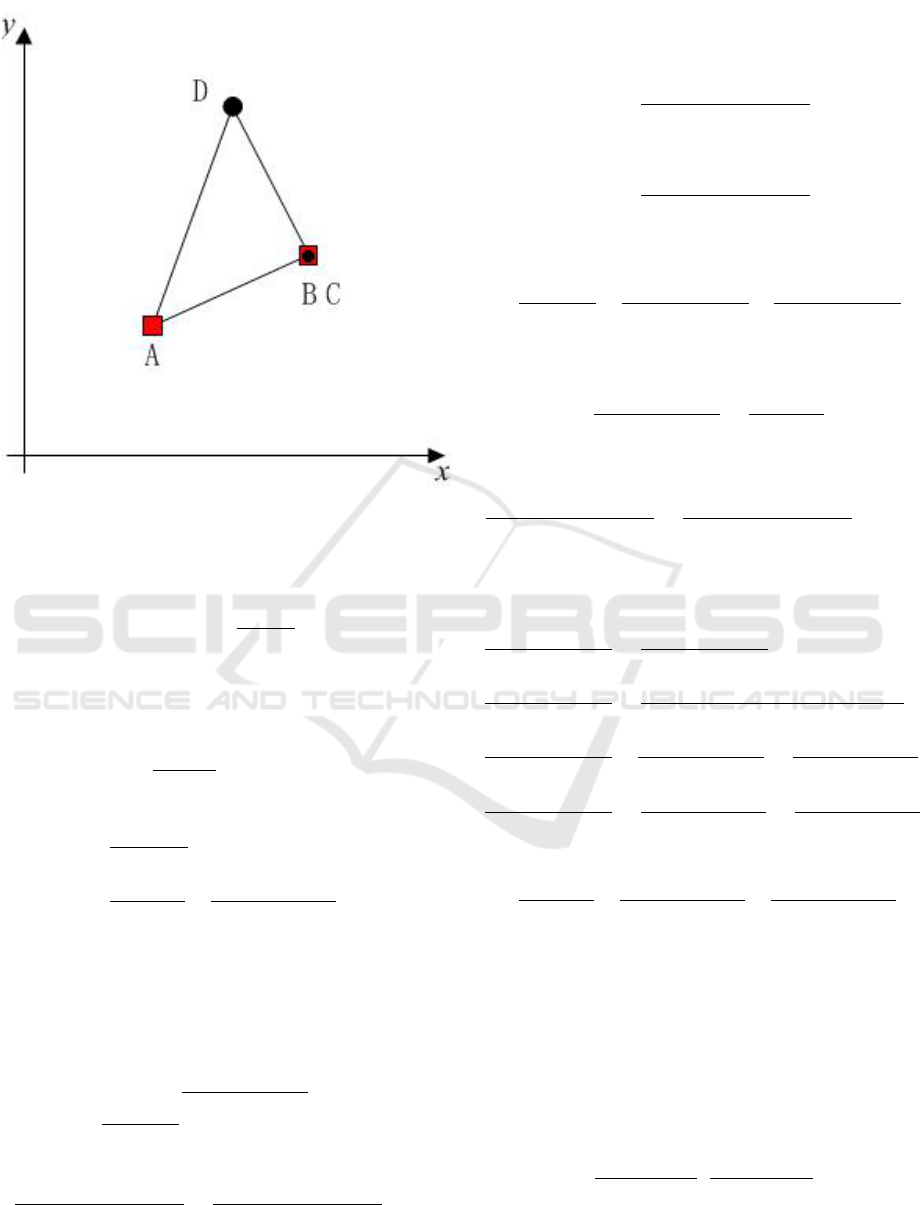
Figure 2: The player B captures player C at t
BC
.
The purpose of A in sub-game 1 is to reduce ρ as
quick as possible with a strategy of A:
ρ(t) = ρ (0) − v
A
−
t
Z
0
⟨
r
A
− r
B
ρ
,v
B
⟩dt (11)
Based on Eq. (11):
ρ(t) ≤ ρ (0) − v
A
t +v
B
t
↔
t ≤
ρ(0)−ρ(t)
v
A
−v
B
(12)
Substituting t = t
BC
into Eq. (12):
t
BC
≤
ρ(0)−ρ(t
BC
)
v
A
−v
B
↔
t
BC
≤
∥
r
A0
−r
B0
∥
2
v
A
−v
B
−
∥
r
A
(t
BC
)−r
B
(t
BC
)
∥
2
v
A
−v
B
(13)
The second row can be proved by a similar argu-
ment. The proof is completed. ■
The relations between the payoff function J and
J
2
(v
∗
C
,v
∗
D
), J
1
(v
∗
A
,v
∗
B
) are presented in lemma 4 and
lemma 5.
Lemma 4: The inequality
J = t
BC
+
∥
r
A
(t
BC
)−r
D
(t
BC
)
∥
2
v
A
−v
D
≤
∥
r
C0
−r
D0
∥
2
v
C
−v
D
= J
2
(v
∗
C
,v
∗
D
)
(14)
holds if
∥
r
A
(t
BC
) − r
D
(t
BC
)
∥
2
v
A
− v
D
≤
∥
r
C
(t
BC
) − r
D
(t
BC
)
∥
2
v
C
− v
D
(15)
holds at time t
BC
.
Proof : After time t
BC
, only A and D participates
in the game. The total time B and D captured by C
and A is derived as:
J = t
BC
+
∥
r
A
(t
BC
) − r
D
(t
BC
)
∥
2
v
A
− v
D
(16)
Based on Eq. (15) and Eq. (16):
J ≤ t
BC
+
∥
r
C
(t
BC
) − r
D
(t
BC
)
∥
2
v
C
− v
D
(17)
The inequality of the second row of Eq. (7) in
lemma 3 and Eq. (17) yield:
J ≤
∥
r
C0
−r
D0
∥
2
v
C
−v
D
−
∥
r
C
(t
BC
)−r
D
(t
BC
)
∥
2
v
C
−v
D
+
∥
r
C
(t
BC
)−r
D
(t
BC
)
∥
2
v
C
−v
D
= J
2
(v
∗
C
,v
∗
D
)
(18)
Lemma 5: The inequality
J = t
BC
+
∥
r
A
(t
BC
)−r
D
(t
BC
)
∥
2
v
A
−v
D
≤
∥
r
A0
−r
B0
∥
2
v
A
−v
B
= J
1
(v
∗
A
,v
∗
B
)
(19)
holds if
∥
r
A
(t
BC
) − r
D
(t
BC
)
∥
2
v
A
− v
D
>
∥
r
C
(t
BC
) − r
D
(t
BC
)
∥
2
v
C
− v
D
(20)
holds at time t
BC
.
Proof : Based on Eq. (20) and the sum of two sides
of a triangle is greater than the third side:
∥
r
A
(t
BC
)−r
D
(t
BC
)
∥
2
v
A
−v
D
>
∥
r
C
(t
BC
)−r
D
(t
BC
)
∥
2
v
C
−v
D
→
∥
r
A
(t
BC
)−r
D
(t
BC
)
∥
2
v
A
−v
D
>
∥
r
A
(t
BC
)−r
D
(t
BC
)
∥
2
−
∥
r
A
(t
BC
)−r
B
(t
BC
)
∥
2
v
C
−v
D
↔
∥
r
A
(t
BC
)−r
D
(t
BC
)
∥
2
v
C
−v
D
−
∥
r
A
(t
BC
)−r
D
(t
BC
)
∥
2
v
A
−v
D
<
∥
r
A
(t
BC
)−r
B
(t
BC
)
∥
2
v
C
−v
D
↔
∥
r
A
(t
BC
)−r
D
(t
BC
)
∥
2
v
A
−v
D
<
∥
r
A
(t
BC
)−r
B
(t
BC
)
∥
2
v
A
−v
C
<
∥
r
A
(t
BC
)−r
B
(t
BC
)
∥
2
v
A
−v
B
(21)
Based on lemma 3 and Eq. (16):
J ≤
∥
r
A0
−r
B0
∥
2
v
A
−v
B
−
∥
r
A
(t
BC
)−r
B
(t
BC
)
∥
2
v
A
−v
B
+
∥
r
A
(t
BC
)−r
B
(t
BC
)
∥
2
v
A
−v
B
= J
1
(v
∗
A
,v
∗
B
)
(22)
This completes the proof. ■
We end this section with a theorem to show that
the equilibrium strategies of the two-two game is con-
sistent with the equilibrium strategies of the sub-game
1 and sub-game 2.
Thereom 1: The value of the dual-role game of
two pursuers and two evaders with simple motion,
where v
A
> v
B
> v
C
> v
D
, is written as:
J = max
∥
r
A0
− r
B0
∥
2
v
A
− v
B
,
∥
r
C0
− r
D0
∥
2
v
C
− v
D
(23)
The corresponding equilibrium strategies are
listed in Eq. (4).
A Novel Dual-Role Two Pursuers and Two Evaders Simple Motion Game
677
Proof : For the evaders B and D, they have two
choices. One is escaping from A and B without in-
tercepting them; the other one is escaping as well as
intercepting the pursuers.
In the first choice, the game is decomposed of sub-
game 1 and sub-game 2. The game value and equilib-
rium strategies are the same with the sub-game 1 and
sub-game 2, which completes the proof in this case.
In the second choice, B and D will not
use the strategies v
∗
B
and v
∗
C
. From lemma 4
and lemma 5, it can be inferred that the J ≤
J
1
(v
∗
A
,v
∗
B
) or J ≤ J
2
(v
∗
C
,v
∗
D
), yielding that J ≤
max(J
1
(v
∗
A
,v
∗
B
),J
2
(v
∗
C
,v
∗
D
). It turns out that the cap-
ture time is less than or equal to Eq. (23) no matter
what the evaders act. Since the evaders wish to max-
imize the capture time, there’s no need for them to
intercept the pursuers, which completes the proof in
this case. ■
5 SIMULATION
Two simulation cases are developed. One is that the
players adopt the equilibrium strategies of the sub-
game 1 and sub-game 2; the other one is that the
players A and C still adopt the best strategies in sub-
game 1 and sub-game 2, while the player B tries his
best to intercept the player C and the player D tries
his best to escape from the player A. In both cases,
v
A
= 5(m/s), v
B
= 4(m/s), v
C
= 3(m/s), v
D
= 2(m/s).
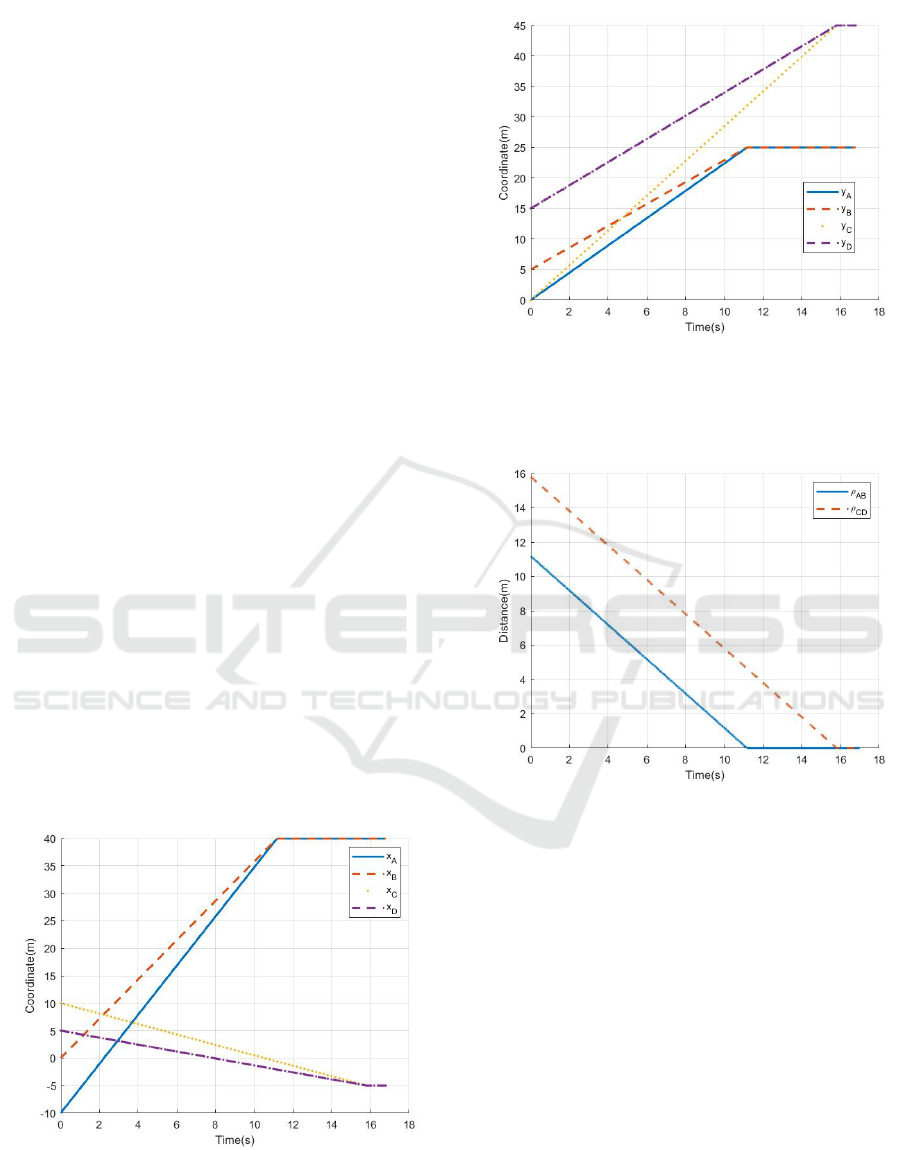
a) Case 1
Under the given strategies, the coordinates of the
four players with respect to time are shown in Fig. 3
and Fig. 4.
Figure 3: x coordinate of the four players.
The distances of (A, B) and (C, D) with respect
to time are shown in Fig. 5. The captures of B and
Figure 4: y coordinate of the four players.
D occur at time 11.171 s and 15.802 s, respectively.
Thus, the capture time is 15.802 s.
Figure 5: The distances of (A, B) and (C, D) with respect to
time.
The trajectories of the four players is shown in
Fig. 6.
b) Case 2
Under the given strategies, the coordinates of the
four players with respect to time are shown in Fig. 7
and Fig. 8.
The distances of (A, D) and (C, B) with respect to
time are shown in Fig. 9. The captures of B and D
occur at time 3.472 s and 8.381 s, respectively. Thus,
the capture time is 8.381 s.
The trajectories of the four players is shown in
Fig. 10.
The capture time in case 1 is greater than case 2,
which is consistent with the theoretical results in the
previous section.
ISAIC 2022 - International Symposium on Automation, Information and Computing
678
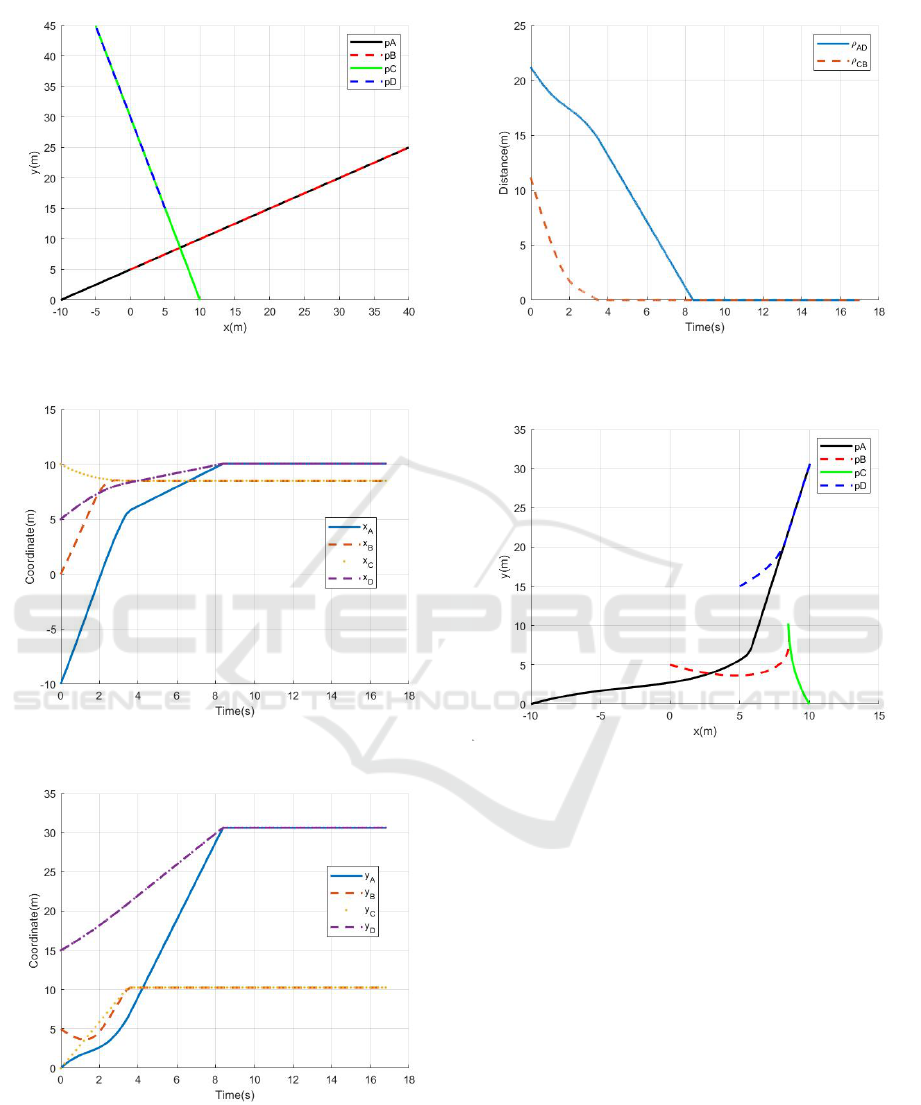
Figure 6: The trajectories of the four players.
Figure 7: x coordinate of the four players.
Figure 8: y coordinate of the four players.
6 CONCLUSIONS
This paper has investigated a novel two pursuers and
two evaders game, considering the dual-role of the
Figure 9: The distances of (A, D) and (C, B) with respect to
time.
Figure 10: The trajectories of the four players.
players. The evaders act as the evader as well as
the pursuer, that is the evader can choose to hit the
pursuer to protect his teammate. Accordingly, the
pursuers also have two roles, for they might be cap-
tured and destroyed by the evader. The state feedback
strategies of all the players are presented and proved.
In particular, it is rigorously demonstrated that the in-
terception by the evader will not increase the capture
time. Therefore, the evaders’ best strategies are con-
sistent with the two one-one games. For validation,
two simulation cases have been developed and com-
pared. The results have a good agreement with the
theoretical analysis.
ACKNOWLEDGMENTS
The authors would like to thank associate editor and
anonymous reviewers for their valuable and construc-
tive comments that improved the paper.
A Novel Dual-Role Two Pursuers and Two Evaders Simple Motion Game
679

REFERENCES
Alias, I. A., Ibragimov, G., and Rakhmanov, A. (2017).
Evasion differential game of infinitely many evaders
from infinitely many pursuers in hilbert space. Dy-
namic Games and Applications, 7(3):347–359.
Chen, J., Zha, W., Peng, Z., and Gu, D. (2016). Multi-player
pursuit–evasion games with one superior evader. Au-
tomatica, 71:24–32.
Exarchos, I., Tsiotras, P., and Pachter, M. (2015). On the
suicidal pedestrian differential game. Dynamic Games
and Applications, 5(3):297–317.
Garcia, E., Casbeer, D. W., and Pachter, M. (2018). Design
and analysis of state-feedback optimal strategies for
the differential game of active defense. IEEE Trans-
actions on Automatic Control, 64(2):553–568.
Garcia, E., Casbeer, D. W., Von Moll, A., and Pachter, M.
(2019). Cooperative two-pursuer one-evader blocking
differential game. In 2019 American Control Confer-
ence (ACC), pages 2702–2709. IEEE.
Garcia, E., Fuchs, Z. E., Milutinovic, D., Casbeer, D. W.,
and Pachter, M. (2017). A geometric approach for the
cooperative two-pursuer one-evader differential game.
Ifac Papersonline, 50(1):15209–15214.
Garc
´
ıa, E., Casbeer, D., and Pachter, M. (2015). Ac-
tive target defense differential game with a fast de-
fender. Proceedings of the American Control Confer-
ence, 2015.
Ibragimov, G., Ferrara, M., Kuchkarov, A., and Pansera,
B. A. (2018). Simple motion evasion differential
game of many pursuers and evaders with integral con-
straints. Dynamic Games and Applications, 8(2):352–
378.
Isaacs, R. (1965). Differential games: a mathematical the-
ory with applications to warfare and pursuit, control
and optimization. Wiley.
Kumkov, S. S., Le M
´
enec, S., and Patsko, V. S. (2017).
Zero-sum pursuit-evasion differential games with
many objects: survey of publications. Dynamic games
and applications, 7(4):609–633.
Makkapati, V. R., Sun, W., and Tsiotras, P. (2018). Pursuit-
evasion problems involving two pursuers and one
evader. In 2018 AIAA Guidance, Navigation, and
Control Conference, page 2107.
Makkapati, V. R. and Tsiotras, P. (2019). Optimal evading
strategies and task allocation in multi-player pursuit–
evasion problems. Dynamic Games and Applications,
9(4):1168–1187.
Pachter, M., Moll, A. V., Garcia, E., Casbeer, D., and Mi-
lutinovi, D. (2020). Cooperative pursuit by multiple
pursuers of a single evader. Journal of Aerospace In-
formation Systems, (2):1–19.
Pachter, M., Von Moll, A., Garcia, E., Casbeer, D. W., and
Milutinovi
´
c, D. (2019). Two-on-one pursuit. Journal
of Guidance Control & Dynamics, pages 1–7.
Sun, W., Tsiotras, P., Lolla, T., Subramani, D. N., and Ler-
musiaux, P. F. (2017). Multiple-pursuer/one-evader
pursuit–evasion game in dynamic flowfields. Journal
of guidance, control, and dynamics, 40(7):1627–1637.
Von Moll, A., Garcia, E., Casbeer, D., Suresh, M.,
and Swar, S. C. (2020). Multiple-pursuer, single-
evader border defense differential game. Journal of
Aerospace Information Systems, 17(8):407–416.
Yan, R., Shi, Z., and Zhong, Y. (2019). Optimal strategies
for the lifeline differential game with limited lifetime.
International Journal of Control, pages 1–14.
Zhang, Y., Zhang, P., Wang, X., Song, F., and Li, C. (2022).
A payoff augmentation approach to two pursuers and
one evader inertial model differential game. IEEE
Transactions on Aerospace and Electronic Systems.
ISAIC 2022 - International Symposium on Automation, Information and Computing
680
