
A Vertex Degree-Based GRASP Approach for the Minimum
Independent Dominating Set Problem
André Eduardo Alessi
a
, Dalcimar Casanova
b
, Lucas Caldeira de Oliveira
c
,
Marco Antonio de Castro Barbosa
d
, Marcelo Teixeira
e
, Ives Rene Venturini Pola
f
and Fernanda Paula Barbosa Pola
g
Federal University of Technology - Paraná, Pato Branco, Brazil
Keywords: Minimum Independent Dominating Set Problem, GRASP, Vertex Degree.
Abstract: The Minimum Independent Dominating Set (MIDS) problem is a classical graph theory problem, with
applications in sensors networks and database management systems. As a NP-hard problem, there is no exact
solution that can be processed in polynomial time, unless 𝑃 = 𝑁𝑃. Some metaheuristic approaches have been
proposed to tackle the problem in polynomial time. In this paper, we develop our own metaheuristic approach
called GRASP+VD, a GRASP that uses vertex degree as its greedy function. We show that GRASP+VD
outperforms the state-of-the-art approach drMIDS in all BHOSLIB dataset and in most of the DIMACS
dataset.
1 INTRODUCTION
The Minimum Independent Dominating Set (MIDS)
problem is a classical graph theory issue which the
solution has shown to be a promising alternative to
search for energy efficient wireless sensor network
topologies (Santos et al., 2009); eliminate redundancy
in wireless sensor and actor network (Akyildiz et al.,
2004); among others (Alowa et al., 2022). Also, it is
used on a new concept of sets used as a
straightforward way to handle similarity in database
management systems, from complex datasets. Some
results towards this direction have been presented in
Pola et al. (2015).
Given a Graph 𝐺=
(
𝑉, 𝐸
)
, a dominating set 𝐷 of
𝐺 is a set of vertices such that every vertex in 𝑉 𝐷
is adjacent to a vertex in 𝐷. Furthermore, a set 𝐼 is
independent if there is no pair of adjacent vertices in
𝐼. Thus, an independent dominating set (𝐼𝐷𝑆) of 𝐺is
a set that is both dominating and independent. The
a
https://orcid.org/0000-0003-0268-9801
b
https://orcid.org/0000-0002-1905-4602
c
https://orcid.org/0000-0002-7881-8414
d
https://orcid.org/0000-0001-9674-2348
e
https://orcid.org/0000-0002-1008-7838
f
https://orcid.org/0000-0001-7300-7535
g
https://orcid.org/0000-0002-0449-0954
MIDS problem focus, therefore, to point out the
smallest 𝐼𝐷𝑆 in a graph.
Some variations of the MIDS problem have been
studied in recent literature. For example, the
independent perfect domination sets in Cayley graph
(Wang et al., 2021), the open-independent, open-
locating-dominating sets in complementary prism
graphs (Capelle et al., 2022) and the IDS with
obligation in graphs (Laforest and Martinod, 2022),
to name a few.
Some exact algorithms have been exploited to
resolve the MIDS problem (Johnson et al. 1988) (Liu
and Song, 2006) (Gaspers and Liedloff, 2006)
(Laforest and Phan, 2013) (Burgois et al., 2013).
However, they are limited by the fact that its
processing has proven to be 𝑁𝑃-Hard (Irving, 1991),
meaning that an exact solution cannot be processed in
polynomial time lest 𝑃=𝑁𝑃 (Halldórsson, 1993).
Even though these solutions guarantee optimal
results, they are limited by the exponential processing
time.
318
Alessi, A., Casanova, D., Caldeira de Oliveira, L., Barbosa, M., Teixeira, M., Pola, I. and Pola, F.
A Vertex Degree-Based GRASP Approach for the Minimum Independent Dominating Set Problem.
DOI: 10.5220/0011924000003612
In Proceedings of the 3rd International Symposium on Automation, Information and Computing (ISAIC 2022), pages 318-323
ISBN: 978-989-758-622-4; ISSN: 2975-9463
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
As an usual alternative to process exponential-
time algorithms, metaheuristics (Gendreau and
Potvin, 2010) have also been conjectured in the
literature to solve the MIDS problem. Some efforts
exploit GRASP algorithms combined with a path cost
function (GRASP+PC) (Wang et al., 2017), others
use memetic algorithms (Wang et al., 2018) and
local-search-based approaches (Haraguchi, 2018),
including the state-of-the-art metaheuristic approach,
drMIDS (Wang et al., 2020).
Although there are some metaheursitic
approaches for the MIDS problem, we will show that
their results have room for improvements in terms of
solution quality. Here, we develop a new
metaheursitic approach for the MIDS problem, called
GRASP+VD, that uses vertex degree as a greedy
function instead of the path cost used by GRASP+PC
by Wang et al. (2017).
2 PROBLEM FORMULATION
In the subsequent, we shall ponder a graph 𝐺=
(𝑉, 𝐸) as finite, undirected, with no multiple edges,
and unlooped structure. We also consider 𝑁(𝑣) as the
neighborhood of the vertex 𝑣, and the closed
neighborhood as 𝑁
𝑣
=𝑁
(
𝑣
)
∪{𝑣}. Then, we can
define (Allan and Laskar, 1978):
Definition 2.1. A set 𝐷⊆𝑉is a dominating set of 𝐺
if ∀𝑣 ∈ 𝑉 – 𝐷, 𝑁
(
𝑣
)
∩𝐷≠ ∅.
Definition 2.2. A set 𝐼⊆𝑉 is an independent set of
𝐺 if ∀𝑢,𝑣 ∈𝐼,𝑁
(
𝑢
)
∩{𝑣}=∅.
Definition 2.3. A set 𝐼𝐷𝑆 ⊆ 𝑉 is an independent
dominating set of 𝐺 if 𝐼𝐷𝑆 is both an independent and
a dominating set, that is, if it follows both Definitions
2.1 and 2.2.
We are now in position to introduce the MIDS
problem, as follows.
Problem 2.1. Specified a graph 𝐺=
(
𝑉, 𝐸
)
, the
MIDS problem aims to identify the smallest
independent dominating set in 𝐺 , following
Definition 2.3.
With the problem formally introduced, we can
explain how we tackle it with our GRASP+VD
approach.
3 THE GRASP+VD APPROACH
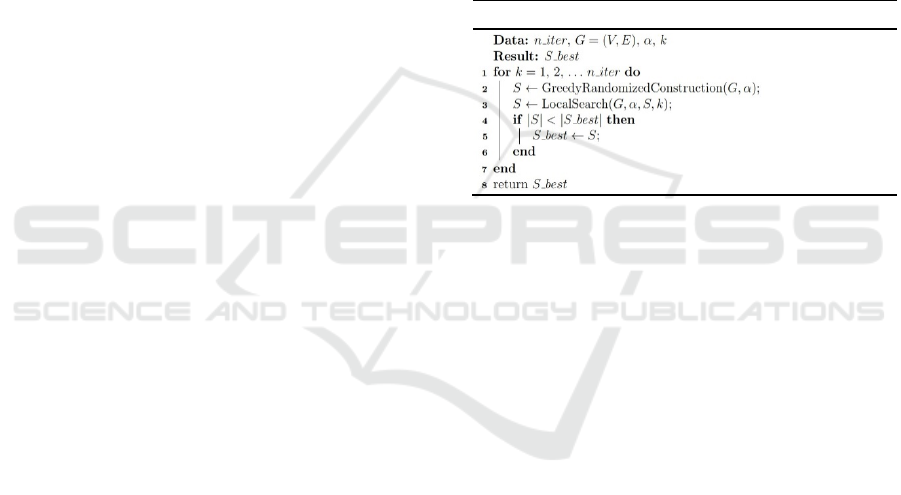
Algorithm 1 demonstrates the main blocks of a
GRASP procedure. On lines 1 to 5, the algorithm runs
𝑛_𝑖𝑡𝑒𝑟 times, where 𝑛_𝑖𝑡𝑒𝑟 is the maximum number
of iterations. On line 2, a solution is fabricated by the
Greedy Randomized Construction (GRC) algorithm,
receiving as input the graph G and α, a threshold
parameter. When α= 0 we have a totally greedy
algorithm and when α= 1 we have a totally random
algorithm. Later, on line 3, the solution passes
through a Local Search phase. Then, on line 4, the
best-known solution 𝑆_𝑏𝑒𝑠𝑡 is updated if 𝑆 is a
reasonable solution (i.e., attends to Definition 2.3)
and better than 𝑆_𝑏𝑒𝑠𝑡. The best-known solution
𝑆_𝑏𝑒𝑠𝑡 is returned on line 6.
Algorithm 1: GRASP
The first step of the GRASP algorithm is the
Greedy Randomized Construction, which is
illustrated in Algorithm 2. Initially, on line 1, the
solution is assumed to be empty. For each iteration of
this stage, the collection of candidates is formed by
all elements of the ground set that can be included to
the partial solution that has being built, while not
preventing the construction of a workable solution. In
this case, the candidate set is the vertex set 𝑉, as
illustrated by line 2. In this case, the greedy function
is the vertex degree: the higher the vertex degree the
lower the incremental cost. The assessment of the
elements by the greedy evaluation function guides to
the making of a restricted candidate list (RCL)
formed by the best elements (this is the greedy aspect
of the heuristic). On line 6, the best elements are
defined by those with greedy function greater or equal
then a parameter α∈
0,1
multiplied by the
difference between the maximum and minimum
value of the greedy function, summed with the
minimum value. The element to be included into the
incomplete solution is randomly selected from those
in the RCL on line 7. Once the selected element is
incorporated on line 8, the candidate list is updated.
The above steps are repeated until there exists at least
one candidate element on lines 3 to 10 (Resende and
Ribeiro, 2010).
A Vertex Degree-Based GRASP Approach for the Minimum Independent Dominating Set Problem
319
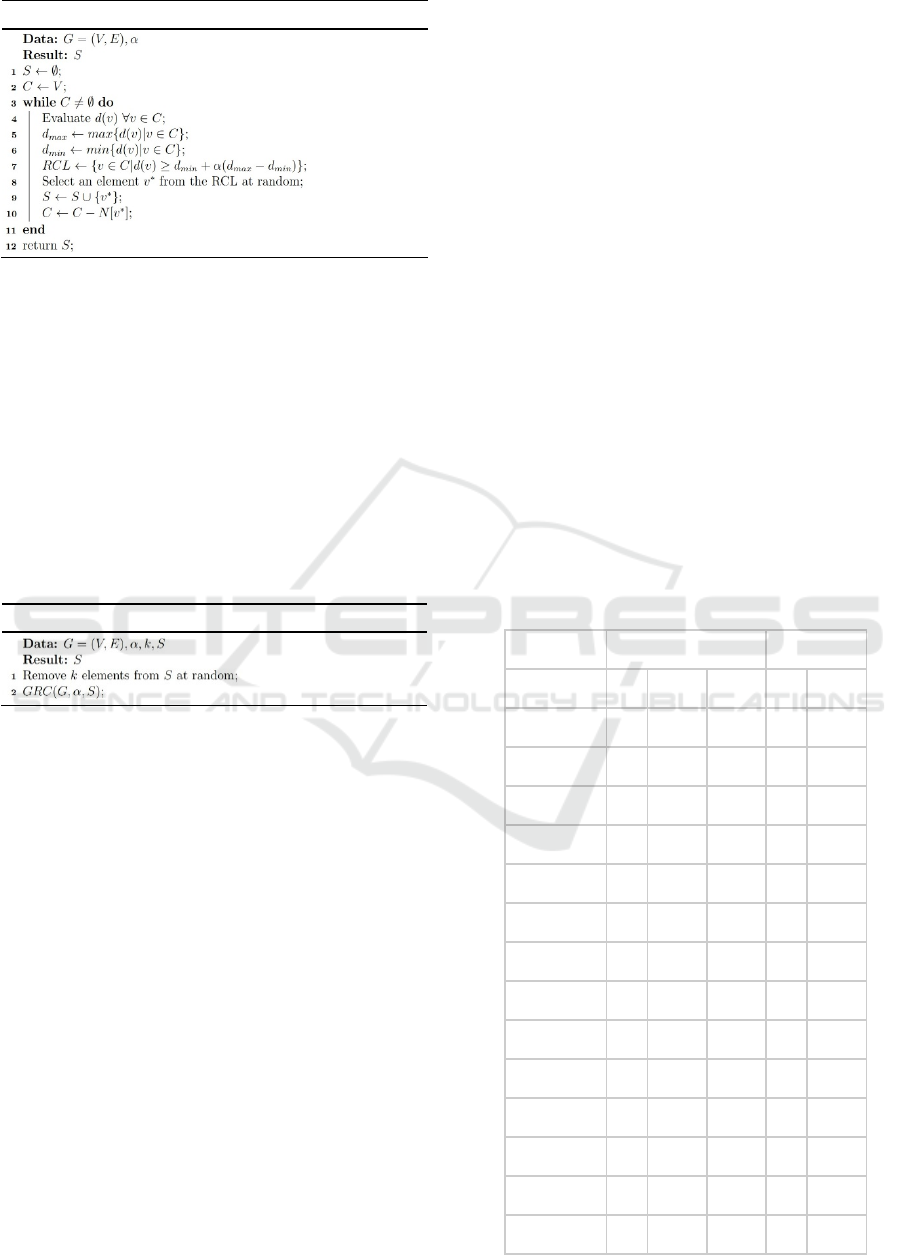
Algorithm 2: Greedy Randomized Construction (GRC).
The solutions created by a greedy randomized
construction are not surely optimal. The local search
phase can improve the constructed solution. A local
search algorithm works in an interactive mode by
successively replacing the current solution by a
superior solution in its neighborhood. In this case,
neighborhood refers to the solutions close to the
current solution in the search space, not to be
confused with vertex neighborhood. In this work, we
chose the strategy of removing k elements at random
from the current solution and reconstruct it by using
Algorithm 2 with the remaining solution set. This
simple procedure is illustrated in Algorithm 3.
Algorithm 3: Local Search.
With the GRASP+VD algorithm fully explained,
we can go on to the computational experiments and
results.
4 COMPUTATIONAL
EXPERIMENTS AND RESULTS
The following experiments were done using a
personal computer with processor AMD Ryzen 5
2600 and 16 GB of RAM, running on Windows 10.
The code was implemented in Python. We performed
computational experiments to apply Algorithm 1 into
the DIMACS (Johnson and Trick, 1996) and
BHOSLIB (Xu et al., 2007) benchmark datasets,
obtained in the Network Repository (Rossi and
Ahmed, 2015).
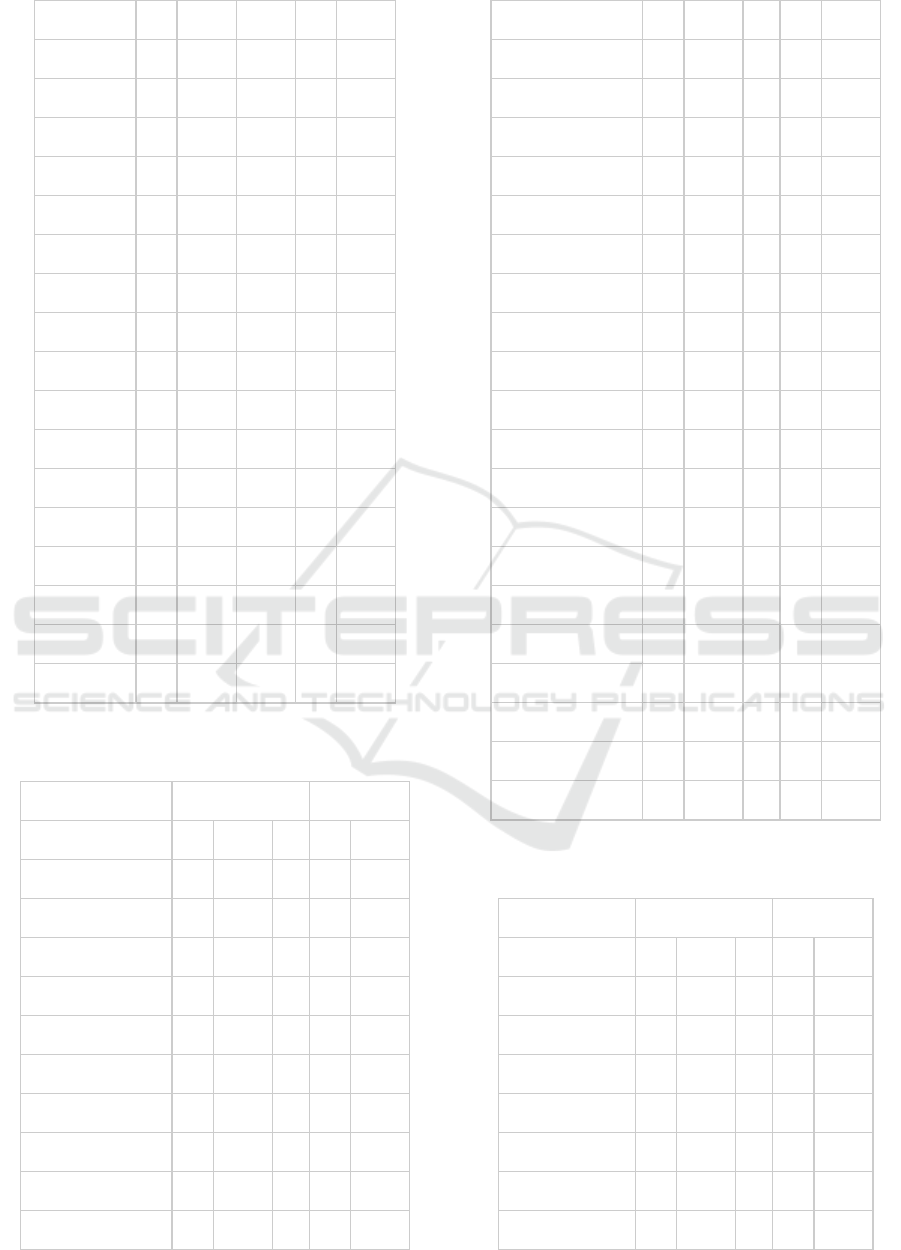
The experiment consists in running the
implemented GRASP+VD algorithm 100 times on
each instance of the datasets, then calculating its
average and minimum results, and comparing to the
results of drMIDS. The outcomes are condensed in
Tables 1, 2, and 3. The first column of the tables
brings the instance name. The second and third
columns bring the minimum and average length of the
independent dominating set extracted by the
GRASP+VD approach, respectively. The fourth
column brings the standard deviation of the length of
the IDS extracted. Finally, the last two columns bring
the minimum and average length of the independent
dominating set extracted by the drMIDS approach,
respectively. The numbers in bold indicate that
GRASP+VD showed equal or better performance in
comparison with drMIDS for that instance. It can be
noticed that GRASP+VD outperforms drMIDS in the
entirety of the BHOSLIB dataset and in 82.7% of the
DIMACS dataset.
These results show that GRASP+VD could be a
better option than drMIDS in terms of finding IDS
with minimum cardinality. By its applications, this
would mean extracting better similarity sets, finding
better energy efficient wireless sensor networks, and
so on. It should be noted that GRASP+VD uses a
simpler information about the vertices, the vertex
degree, than the personalized path cost utilized by
drMIDS as its greedy function.
Table 1: Experimental results of GRASP+VD and drMIDS
on the BHOSLIB dataset.
GRASP+VD drMIDS
Instance min mean std min mean
frb100-40 34.29 0.537 43 44.35
frb30-15-1 33 0 11 11
frb30-15-2 33 0 11 11
frb30-15-3 33.01 0.100 11 11
frb30-15-4 33 0 11 11
frb30-15-5 33.11 0.314 11 11
frb35-17-1 33.19 0.394 13 13
frb35-17-2 33.08 0.273 13 13.03
frb35-17-3 33.07 0.256 13 13
frb35-17-4 33.13 0.338 13 13.29
frb35-17-5 33.06 0.239 13 13.65
frb40-19-1 33.05 0.219 15 15.39
frb40-19-2 33.06 0.239 15 15.03
frb40-19-3 33.19 0.394 15 15.03
ISAIC 2022 - International Symposium on Automation, Information and Computing
320
frb40-19-4 3 3 0 15 15
frb40-19-5 3 3.09 0.288 15 15.19
frb45-21-1 3 3.09 0.288 17 17.77
frb45-21-2 3 3.13 0.338 17 17.87
frb45-21-3 3 3.21 0.409 17 17.39
frb45-21-4 3 3.18 0.386 17 17.55
frb45-21-5 3 3.14 0.349 17 17.45
frb50-23-1 3 3.38 0.488 19 19.94
frb50-23-2 3 3.25 0.435 19 19.9
frb50-23-4 3 3.31 0.465 19 19.9
frb50-23-5 3 3.09 0.288 20 20.03
frb53-24-4 3 3.29 0.456 20 20.9
frb53-24-5 3 3.58 0.496 20 21.06
frb59-26-1 3 3.33 0.473 23 23.61
frb59-26-2 3 3.59 0.494 23 23.9
frb59-26-3 3 3.62 0.488 23 23.84
frb59-26-4 3 3.42 0.554 23 23.94
frb59-26-5 3 3.84 0.368 24 24.19
Table 2: Experimental results of GRASP+VD and drMIDS
on the DIMACS dataset I.
GRASP+VD drMIDS
Instance min mean std min mean
brock200-2 5 5.0 0.1 4 4
brock200-4 33.3 0.5 6 6
brock400-2 33.5 0.5 9 9
brock400-4 33.0 0 9 9
brock800-2 45.0 0.1 8 8
brock800-4 44.9 0.3 8 8
C1000-9 22.4 0.5 25 25.48
C125-9 22 0 14 14
C2000-5 7 7.7 0.4 7 7
C2000-9 33 0 32 32.03
C250-9 22 0 17 17
C4000-5 8 8.8 0.4 8 8
C500-9 22 0 21 21
DSJC1000-5 6 6.9 0.4 6 6
DSJC500-5 5 5.9 0.3 5 5
c-fat200-1 13 13.5 0.5 13 13
c-fat200-2 6 6.4 0.5 6 6
c-fat200-5 3 3 0.0 3 3
c-fat500-1 28 30 0.7 27 27
c-fat500-2 14 14.8 0.5 14 14
c-fat500-5 66 0 6 6
g
en200-p0-9-44 22 0 16 16
g
en200-p0-9-55 22 0 16 16
g
en400-p0-9-55 22 0 20 20
g
en400-p0-9-65 22 0 20 20
g
en400-p0-9-75 22 0 20 20
hammin
g
10-4 88 0 12 12
hammin
g
6-2 22 0 12 12
hammin
g
6-4 8 8 0 2 2
hammin
g
8-2 22 0 32 32
hammin
g
8-4 8 8 0 4 4
Table 3: Experimental results of GRASP+VD and drMIDS
on the DIMACS dataset II.
GRASP+VD drMIDS
Instance min mean std min mean
j
ohnson16-2-4 33 0 8 8
j
ohnson32-2-4 33 0 16 16
j
ohnson8-2-4 33 0 4 4
j
ohnson8-4-4 55 0 7 7
keller4 44 0 5 5
keller5 44 0 9 9
keller6 44 0 15 17.16
A Vertex Degree-Based GRASP Approach for the Minimum Independent Dominating Set Problem
321

MANN-a27 2 2 0 27 27
MANN-a45 2 2 0 45 45
MANN-a81 2 2 0 81 81
MANN-a9 2 2 0 9 9
p-hat1500-1 14 16.7 1.1 12 12.71
p-hat1500-2 7 10.0 0.9 7 7.68
p-hat1500-3 4 4.1 0.3 3 3
p-hat300-3 3 3 0.1 3 3
p-hat700-1 12 14.2 0.9 11 11
p-hat700-2 7 8.4 0.9 6 6
p-hat700-3 3 3.5 0.5 3 3
san1000 19 22.1 1.1 4 4
san200-0-7-1 3 3.2 0.4 6 6
san200-0-7-2 4 4.5 0.5 6 6
san200-0-9-2 2 2 0 16 16
san200-0-9-3 2 2 0 15 15
san400-0-5-1 13 15.2 0.9 4 4
san400-0-7-1 4 4.8 0.5 7 7
san400-0-7-2 4 5.0 0.7 7 7
san400-0-7-3 5 5.1 0.3 7 7
5 CONCLUSIONS
The Minimum Independent Dominating Set (MIDS)
problem is a classical graph theory problem. The
solution for this problem has applications in some
areas, like sensors networks and similarity set
extraction. There has been some work regarding
approximated approaches for this problem, but there
was room to improvement.
In this work, we suggested a novel GRASP+VD
approach that uses vertex degree instead of path cost
as greedy function, explained its functioning and
made computational experiments to measure its
performance against the competitor drMIDS
approach. We demonstrated that GRASP+VD
outperforms drMIDS in the entirety of the BHOSLIB
dataset and in 84.2% of the DIMACS dataset.
For future research, we would like to experiment
different types of metaheuristics to compare their
performances with GRASP+VD. We suggest Ant
Colony Optimization and Simulated Annealing as
starting points.
ACKNOWLEDGEMENTS
This work was financed in part by the Coordenação
de Aperfeiçoamento de Pessoal de Nível Superior –
Brasil (CAPES) – Finance Code 001, of Conselho
Nacional de Desenvolvimento Científico e
Tecnológico (CNPq), from Fundação Araucária (FA)
and from Financiadora de Estudos e Projetos
(FINEP).
REFERENCES
Akyildiz, I., Kasimoglu, I., 2004. Wireless sensor and actor
networks: research challenges. Ad Hoc Networks, 2 (4):
351 – 367.
Allan, R., Laskar, R., 1978. On domination and
independent domination numbers of a graph. Discrete
mathematics, 23 (2): 73-76.
Alowa, A., Fevens, T., Khamayseh, Y., 2022. Survival
backup strategy for controller placement problem in
software defined networking. Computer
Communications, 185: 104-117.
Bourgeois, N., Della Croce, F., Escoffier, B., Paschos, V.,
2013. Fast algorithms for min independent dominating
set. Discrete Applied Mathematics, 161 (4): 558-572.
Capelle, M. R., Coelho, E. M. M., Foulds, L.R., Longo, H.
J., 2022. Complexity results on open-independent,
open-locating-dominating sets in complementary prism
graphs. Discrete Applied Mathemathics, in press.
Gaspers, S., Liedloff, M., 2006. A branch-and-reduce
algorithm for finding a minimum independent
dominating set in graphs. In: International Workshop
on Graph-Theoretic Concepts in Computer Science,
Springer: 78-89.
Grandreau, M., Potvin, J., 2010. Handbook of
metaheursitics, Vol. 2, Springer.
Halldórson, M., 1993. Approximating the minimum
maximal independence number. Information
Processing Letters, 46 (4): 169-172.
Haraguchi, K., 2018. An efficienct local search for the
minimum independent dominating set problem. arXiv
preprint. arXiv:1802.06478.
Irving, R., 1991. On approximating the minimum
independent dominating set. Information Processing
Letters, 37 (4): 197-200.
Johnson, D., Yannakakis, C., Papadimitriou, C., 1988. On
generating all maximal independent sets. Information
Processing Letters, 27 (3): 119-123.
ISAIC 2022 - International Symposium on Automation, Information and Computing
322

Johnson, D., Trick, M., 1996. Cliques, coloring, and
satisfiability: second DIMACS implementation
challenge. American Mathematical Society, Vol. 26.
Laforest, C., Phan, R., 2013. Solving the minimum
independent domination set problem in graphs by exact
algorithm and greedy heuristic. RAIRO – Operations
Research, 47: 199-221.
Laforest, C., Martinod, T., 2022. On the complexity of
independent dominating set with obligation in graphs.
Theoretical Computer Science, 904: 1-14.
Liu, C., Song, Y., 2006. Exact algorithms for finding the
minimum independent dominating set in graphs. In:
Asano, T. (eds) Algorithms and Computation. ISAAC
2006. Lecture Notes in Computer Science, vol 4288.
Springer, Berlin, Heidelberg: 439-448.
Pola, I., Cordeiro, R., Traina, C., Traina, A., 2015.
Similarity sets: a new concept of sets to seamlessly
handle similarity in database management systems.
Information Systems, 52: 130-148.
Resende, M., Ribeiro, C., 2010. Greedy randomized
adaptative search procedures: Advances,
hybridizations, and applications. In: Handbook of
metaheuristics, Springer, 2010, pp. 283-319.
Rossi, R., Ahmed, N., 2015. The network data repository
with interactive graph analytics and visualization. In:
AAAI 2015.
Santos, A., Bendali, F., Mailfert, J., Duhamel, C., Hou, K.,
2009. Heuristics for designing energy-efficient wireless
sensor network topologies. Journal of networks.
Wang, X., Xu, S.-J., Li, X., 2021. Independent perfect
dominating sets in semi-Cayley graphs. Theoretical
Computer Science, 864: 50-57.
Wang, Y., Li, R., Zhou, Y., Yin, M., 2017. A path cost-
based grasp for minimum independent dominating set
problem. Neural Computing and Applications, 28: 143-
151.
Wang, Y., Chen, J., Sun, H., Yin, M., 2018. A memetic
algorithm for minimum independent dominating set
problem. Neural Computing and Applications, 30:
2519-2529.
Wang, Y., Li, C., Yin, M., 2020. A two phase removing
algorithm for minimum independent dominating set
problem. Applied Soft Computing, 88.
Xu, K., Boussemart, F., Hemery, F., Lecoutre, C., 2007.
Random constraint satisfaction: Easy generation of
hard (satisfiable) instances. Artificial Intelligence, 171
(8): 514-534.
A Vertex Degree-Based GRASP Approach for the Minimum Independent Dominating Set Problem
323
