
Design of Intestinal Modular Robot and Dynamics Analysis of Its
Docking Mechanism
Dasheng Liu
*
School of Sensing Science and Engineering, School of Electronic Information and Electrical Engineering,
Shanghai Jiao Tong University, Shanghai, China
Keywords: Modular Design, Docking Mechanism, Intestinal Robot, Kinetic Analysis.
Abstract: This paper presents a modular design scheme of intestinal capsule robot, and establishes the analysis model
of multi-module docking mechanisms. Firstly, the overall structure design of the intestinal module robot and
the method of rod-cone docking in the intestinal tract are given. Then, by dividing the modules into installation
module and docking module, the coordinate transformation method and virtual simulation analysis model for
the two modules to realize docking in the intestine are constructed. Finally, the docking process of adjacent
modules is simulated using dynamic analysis software, and the experimental results verify the effectiveness
of the design.
1 INTRODUCTION
In order to overcome the limitations of capsule
endoscopy, many research institutions have carried
out a lot of improvement works in the past 20 years,
and have successively developed two kinds of capsule
endoscopes: magnetic control capsule and magnetic
rotary capsule (Madani et al., 2016; Phan et al., 2021;
Qian et al., 2018; Zhang et al., 2020; Zhang et al.,
2017). The magnetic control capsule endoscope can
realize three-dimensional movement, which is
suitable for diagnosing the expanded gastric cavity,
but its disadvantage is that the positioning of the
capsule in the body is not accurate, and because of the
small magnetic traction, it is difficult to achieve
effective movement in the intestine. The magnetic
rotary capsule endoscope also has some limitations:
for example, when the capsule moves, it needs to fill
the intestine with transparent liquid medium, but
when the liquid is not full, the rotary capsule is easy
to twist the intestine, causing intestinal damage.
Micro gastrointestinal robot is one of the most
potential alternatives to traditional gastrointestinal
endoscopy, and has been a research hotspot in the
field of medical devices in recent years. At the
*
Liu, D. Design of intestinal modular robot and dynamics
analysis of its docking mechanism. In Proceedings of the
3rd International Symposium on Automation, Information
and Computing (ISAIC 2022).
beginning of gastrointestinal robot research, in view
of the limitations of capsule endoscope, prototypes of
gastrointestinal robots based on many bionic
principles have been designed one after another,
providing them with the function of imitating the
active movement of Inchworm, beetle, cockroach,
fish, etc. (Kosa et al., 2006; Li et al., 2007; Menciassi
et al., 2004; Moglia et al., 2007; Park et al., 2006).
The motion mechanism is the key and difficult point
in the development of gastrointestinal robot. The
ideal motion mechanism should have the ability of
bidirectional movement, expansion and residence in
the intestinal tract, and its principle is simple, easy to
realize and its size is miniaturized (Buselli et al.,
2009; Gao et al., 2016; Gao et al., 2019; Lu et al.,
2018; Wang et al.,2013; Zhang et al., 2020).
The method of adding a motion mechanism to the
capsule increases the number of various parts that
need to be integrated into the capsule, which
inevitably increases the overall size of the robot, so
that it cannot be orally swallowed by the person to be
examined. Therefore, researchers put forward the
design idea of building a modular robot system based
on magnetic self-assembly. The main idea is to
swallow one capsule module each time, and multiple
230
Liu, D.
Design of Intestinal Modular Robot and Dynamics Analysis of Its Docking Mechanism.
DOI: 10.5220/0011918500003612
In Proceedings of the 3rd International Symposium on Automation, Information and Computing (ISAIC 2022), pages 230-235
ISBN: 978-989-758-622-4; ISSN: 2975-9463
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

modules are swallowed in turn, and finally assembled
in the gastrointestinal tract (Li et al., 2018; Nagy et
al., 2010; Zygomalas et al., 2014). At present, the
method of realizing the docking of multiple capsule
modules based on the principle of magnetic
adsorption in the gastric cavity is usually used.
However, the magnetic interaction between modules
is essentially a passive effect, therefore, the docking
process between modules simply relying on it is
uncontrollable. Meanwhile, after multiple modules
are swallowed into the human gastric cavity, their
initial mutual positions and their respective postures
in the three-dimensional space have many
possibilities, thus, it objectively leads to a certain
degree of contingency in achieving successful
assembly.
In this paper, a design of capsule modular robot
based on conical rod docking mechanism is proposed,
and the effectiveness of its docking method is verified
by dynamic analysis.
2 DESIGN OF INTESTINAL
MODULAR ROBOT
2.1 Overall Structure of Intestinal
Modular Robot
The intestinal modular robot mechanism designed in
this paper is shown in Figure 1, which is composed
of three modules, namely module-Ⅰ, module-Ⅱ and
module-Ⅲ. Among them, module-Ⅰ and module-Ⅲ
are of the same structure (Figure 2a, 2b), which is
called installation module, and module-Ⅱ is of
abnormal structure (Figure 2c), which is called
docking module. The installation module mainly
consists of: a radial expansion mechanism, a radial
expansion transmission device and a docking cone
with double symmetrical configuration. The docking
module includes a bidirectional telescopic driving
Figure 1: Overall structure of intestinal modular robot.
device and a bidirectional telescopic docking rod. The
mechanism transmits power to the radial expansion
mechanism to expand the intestinal tract through the
radial expansion drive device of the installation
module, and then drives the telescopic movement of
the docking rod through the telescopic driving device
of the docking module, and completes the connection
between the installation module and the docking
module by using the guidance of the docking cone of
the installation module. Here, the dimension of
installation module is radial diameter Ф14.9mm,
axial length 29mm, and that of docking module is
radial diameter Ф13mm, axial length 24mm.
2.2 Assembly Process of Modular
Robot
Figure 3 shows the docking process of three capsule
modules in the intestine. When the first installation
module (module-Ⅰ) enters the intestinal tract, its radial
expansion mechanism is opened so that module-Ⅰ
resides here; Then, when the second capsule module
(module-Ⅱ) approaches the first capsule module, the
front-end docking mechanism of module-Ⅱ is
controlled to realize docking with module-Ⅰ.
Similarly, when the third capsule module (module-
Ⅲ) enters the intestinal tract and is close to the second
capsule module, its radial expansion mechanism is
opened to make module-Ⅲ stay, and then the action
of the rear docking mechanism of module-Ⅱ can be
Figure 2: Main structure diagram of individual module. (a)Installation module (closed-state), (b) Installation module
(open-state), (c) Docking module.
Design of Intestinal Modular Robot and Dynamics Analysis of Its Docking Mechanism
231
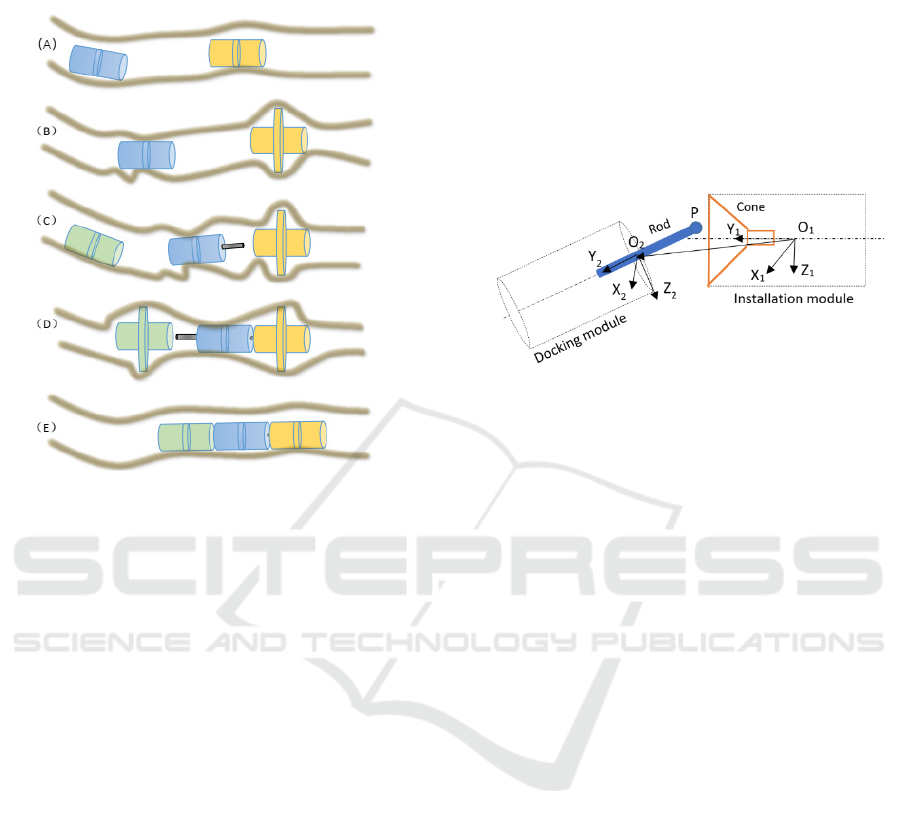
controlled to realize the docking of module-Ⅱ and
module-Ⅲ.
Figure 3: Schematic diagram of capsule module assembly
process.
3 CONE-ROD DOCKING
MECHANISM
Due to the radial deformation of the intestinal tract,
when designing the docking mechanism for module
robot, it is necessary to fully consider that the docking
mechanism has a good deviation correction ability in
the radial position of the intestinal tract. Therefore,
this paper studies and designs a cone-rod docking
mechanism with a certain envelope space in the radial
circumferential direction to ensure that the capsule
module can achieve reliable docking in the flexible
intestinal tract. The premise for the reliable docking
of adjacent capsule modules is that the deviation of
their radial relative posture is maintained in the
envelope space of the docking cone at one end of the
installation module. However, the relative posture of
the capsule module in the intestine shows a certain
range of randomness because of the viscoelastic
deformation of the intestinal wall.
In order to analyze the kinematic characteristics
of the module docking mechanism, the simplified
model shown in Figure 4 is established. Since the
installation module will reside in the intestinal tract
due to the expansion tension during the docking
process, its relative position with the intestinal wall is
fixed during this period. Here, the origin of the global
coordinate system O
1
-X
1
Y
1
Z
1
is located at the
geometric centre of the installation module, in which
the Y
1
-axis coincides with its central axis, and the X
1
-
Y
1
plane is taken as the tangent plane of the
installation module passing through the central circle
point and perpendicular to the Y-axis. While the
origin of the local coordinate system O
2
-X
2
Y
2
Z
2
is
placed at the center of the docking surface at one end
of the docking module.
Figure 4: Analysis model of docking mechanism.
Euler angle (φ, θ, ψ) is used to define the attitude
of docking module by axis Z
2
Y
2
X
2
. Assume that the
coordinate of point O
2
in coordinate system O
1
-
X
1
Y
1
Z
1
is 𝑑
,𝑑
,𝑑
. The formulas of coordinate
rotation and translation compound transformation are
as follows.
𝑇
=𝑇𝑟𝑎𝑛𝑠𝑑
,𝑑
,𝑑
𝑅𝑜𝑡
(
𝑥
,𝜓
)
𝑅𝑜𝑡
(
𝑦
,𝜃
)
𝑅𝑜𝑡
(
𝑧
,𝜑
)
, (1)
where,
𝑇𝑟𝑎𝑛𝑠𝑑
,𝑑
,𝑑
=
100𝑑
010𝑑
001𝑑
0001
(2)
𝑅𝑜𝑡
(
𝑥
,𝜓
)
=
10 00
0𝑐𝜓−𝑠𝜓0
0𝑠𝜓𝑐𝜓0
00 01
, (3)
𝑅𝑜𝑡
(
𝑦
,𝜃
)
=
𝑐𝜃 0 𝑠𝜃 0
0100
−𝑠𝜃 0 𝑐𝜃 0
0001
, (4)
𝑅𝑜𝑡
(
𝑧
,𝜑
)
=
𝑐𝜑 −𝑠𝜑 0 0
𝑠𝜑 𝑐𝜑 0 0
0010
0001
. (5)
Here, c𝑖,s𝑖,(𝑖=φ,θ,ψ) are the abbreviations of
cos (𝑖),sin (𝑖),(𝑖= φ,θ,ψ).
ISAIC 2022 - International Symposium on Automation, Information and Computing
232
4 DYNAMIC SIMULATION OF
DOCKING MECHANISM
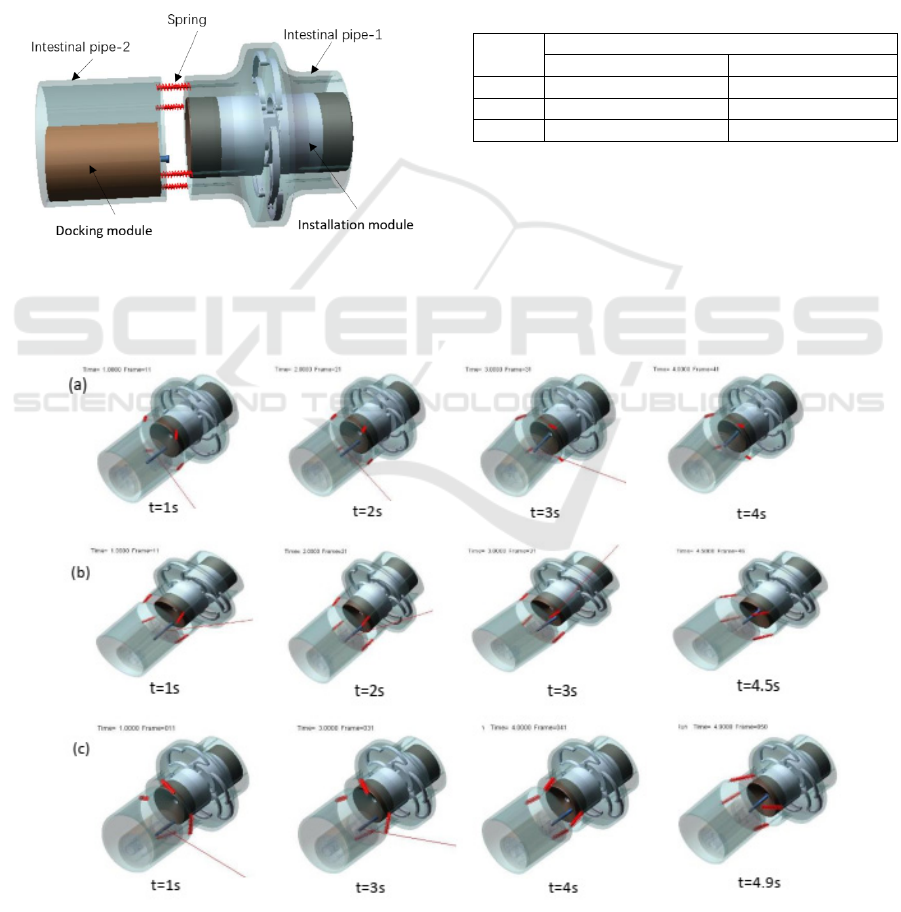
Adams solver is used to simulate the dynamics of the
docking mechanism of the module. Consider that the
expansion mechanism of the installation module
expands and resides in the intestinal tract.
The installation module can be regarded as
relatively fixed with the intestinal pipe-1, and the
docking module in the intestinal pipe-2 can be
regarded as relatively fixed in the docking process
due to the effect of friction as shown in Figure 5.
Figure 5: Virtual prototype analysis model.
In addition, four springs are arranged between
intestinal pipe-1 and pipe-2 at a circumferential
interval of 90° to simulate the flexible deformation of
the intestinal wall. The stiffness and damping
coefficient of each spring are set as 5.8E-006(N/mm)
and 1.5E-006(N·s/mm), respectively.
In order to verify the effectiveness of docking
module in different positions and postures, three
different cases shown in Table 1 are selected to
simulate and analyze the movement of docking rod.
The movement speed of the docking rod along the
axial expansion of the docking module is set to 2mm/s.
Table 1: Simulation parameters.
Case Parameters
(φ
, θ,
ψ)
[de
g
ree]
(
dx, d
y
, dz
)
[mm]
Case 1 (-1.736,0.20,0) (-0.44, 20.47, 4.19)
Case 2 (-1.736, -5.192, 0) (-2.44, 20.59, 4.34)
Case 3 (3.265, 1.803, 0.114) (3.70, 20.53, 4.14)
The results of simulation analysis are shown in
Figure 6, in which motion screenshots at different
time points after the start of simulation are taken
respectively. It can be seen from Figure 6 that in
Case-1 (Figure 6a), the docking rod-head smoothly
entered the central circular hole at the top of the
installation module after about 4s under the guidance
Figure 6: Snapshot of docking process in three cases. (a) Case 1, (b) Case 2, (c) Case 3.
Design of Intestinal Modular Robot and Dynamics Analysis of Its Docking Mechanism
233
of the docking cone, while in Case-2 (Figure 6b) and
Case-3 (Figure 6c), the time required for docking
completion is nearly 4.5s and 4.9s, respectively.
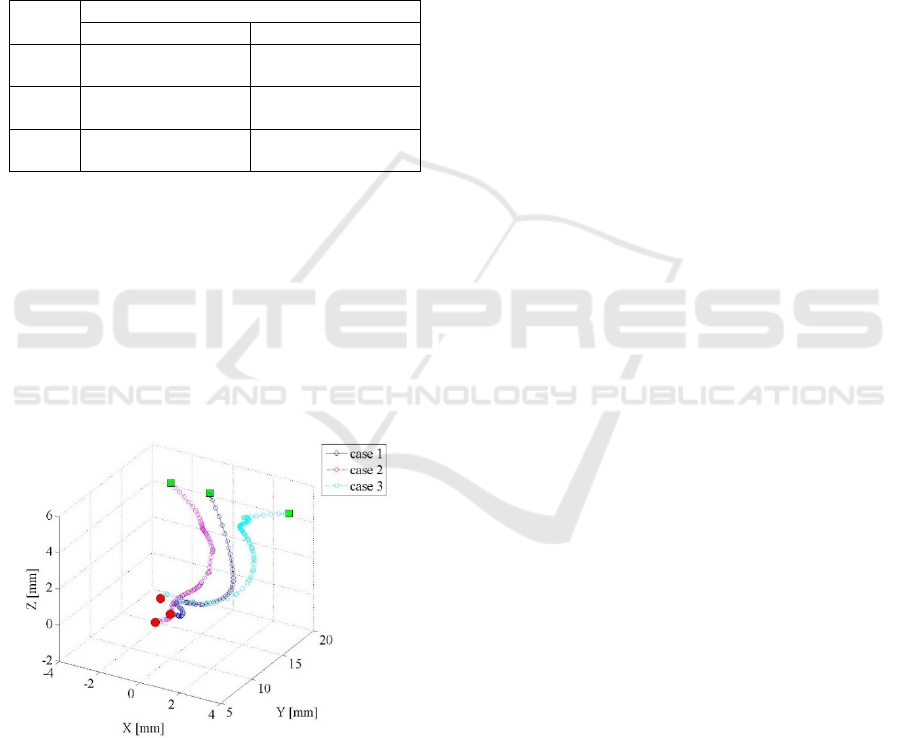
Figure 7 shows the trajectory of the docking rod-
head in three-dimensional space during the docking
movement in the above three cases. In Figure 7, the
green square point represents the starting point
coordinate of the docking rod-head, while the red dot
stands for the end point coordinate after docking
process is completed.
Table 2: Coordinates of starting point and ending point of
docking rod-head.
Case Coordinate
Start
p
oint End
p
oint
Case 1 (-0.894, 25.086,
4.437)
(-0.173, 16.410,
0.265)
Case 2 (-2.808, 25.088,
4.435)
(-0.525, 15.095,
0.0587)
Case 3 (3.014, 25.168,
4.409
)
(-0.986, 17.439,
0.622
)
The three-dimensional coordinates of the start
point and end point of the docking rod-head in the
three cases are shown in Table 2. It can be seen from
Figure 6 and Figure 7 that in the process of module
docking, even if the position and posture of the
docking module are different from the installation
module within a certain range, the docking rod can
successfully complete the docking of two adjacent
modules under the guidance of the docking cone.
Figure 7: Trajectory diagrams of endpoint in docking rod
with three cases.
5 CONCLUSIONS
This paper presented a design scheme of an intestinal
modular robot based on docking cone and established
the coordinate transformation method and virtual
simulation model for the two modules to realize
docking in the intestine. The dynamics and docking
simulation process of modular docking mechanism
are analyzed emphatically. The simulation results
showed that the modular design of the intestinal robot
proposed in this paper is feasible.
ACKNOWLEDGEMENTS
This work was supported by the Research Project of
Traditional Chinese Medicine of Shanghai Health
Committee under Grant number 2020JP012. The
statements made herein are solely the responsibility
of the authors.
REFERENCES
Buselli, E., Valdastri, P., Quirini, M., Menciassi, A. and
Dario, P. (2009). Superelastic leg design optimization
for an endoscopic capsule with active locomotion.
Smart Materials and Structures, 18(1), 15001.
Gao, J., Yan, G., Shi, Y., Cao, H., Huang, K. and Liu, J.
(2019). Optimization design of extensor for
improving locomotion efficiency of inchworm-like
capsule robot. Science China Technological
Sciences, 62(11): 1930-1938.
Gao, J., Yan, G., Wang, Z., He, S., Xu, F., Jiang, P. and Liu,
D. (2016). Design and Testing of a Motor-Based
Capsule Robot Powered by Wireless Power
Transmission. IEEE/ASME Transactions on
Mechatronics, 21(2):683-693.
Kosa, G., Shoham, M. and Zaaroor, M. (2006). Propulsion
of a Swimming Micro Medical Robot. In
Proceedings of the IEEE International Conference
on Robotics and Automation.
Li, J., Barjuei, E. S., Ciuti, G., Hao, Y., Zhang, P.,
Menciassi, A. and Dario, P. (2018). Magnetically-
driven medical robots: An analytical magnetic model
for endoscopic capsules design. Journal of
Magnetism and Magnetic Materials, 452:278-287.
Li, W. D., Guo, W., Li, M. T. and Zhu, Y. H. (2007). Design
and Test of a Capsule Type Endoscope Robot with
Novel Locomation Principle. In Proceedings of the
International Conference on Control, Automation,
Robotics and Vision.
Lu, H., Zhang, M., Yang, Y., Huang, Q., Fukuda, T., Wang,
Z. and Shen, Y. (2018). A bioinspired multilegged
soft millirobot that functions in both dry and wet
conditions. Nature Communications, 9(1).
Madani, K., Khanmohammadi, S. and Azimirad, V. (2016).
Finding Optimal Actuation Configuration for
Magnetically Driven Capsule Endoscopy Based on
ISAIC 2022 - International Symposium on Automation, Information and Computing
234

Genetic Algorithm. Journal of Medical and
Biological Engineering, 36(6):776-787.
Menciassi, A., Stefanini, C., Gorini, S., Pemorio, G., Dario,
P., Kim, B. and Park, J. O. (2004). Legged
locomotion in the gastrointestinal tract. In
Proceedings of the 2004 IEEE/RSJ International
Conference on Intelligent Robots and Systems
(IROS), pages 937-942.
Moglia, A., Menciassi, A., Schurr, M. O. and Dario, P.
(2007). Wireless capsule endoscopy: from diagnostic
devices to multipurpose robotic systems. Biomedical
Microdevices, 9(2):235-243
Nagy, Z. and Nelson, B. (2010). On the Feasibility of
Magnetic Self-Assembly for Swallowable Modular
Robots. In the ICRA 2010 Workshop: Meso-Scale
Robotics for Medical Interventions, Anchorage, AK.
Park, S., Park, H., Park, S., Jee, C., Kim, J. and Kim, B.
(2006). Capsular locomotive microrobot for
gastrointestinal tract. In the proceedings of the 28th
IEEE EMBS Annual International Conference, New
York City, USA.
Phan, P. T., Tiong, A. M. H., Miyasaka, M., Cao, L., Kaan,
H. L., Ho, K. Y. and Phee, S. J. (2021). EndoPil: A
Magnetically Actuated Swallowable Capsule for
Weight Management: Development and Trials.
Annals of Biomedical Engineering, 49(5):1391-1401.
Qian, Y., Zhu, S., Hou, X., Zhou, W., An, W., Su, X. and
Liao, Z. (2018). Preliminary study of magnetically
controlled capsule gastroscopy for diagnosing
superficial gastric neoplasia. Digestive and Liver
Disease, 50(10):1041-1046.
Wang, X., Sliker, L. J., Qi, H. J. and Rentschler, M. E.
(2013). A quasi-static model of wheel-tissue
interaction for surgical robotics. Medical
Engineering & Physics, 35(9):1368-1376.
Zhang, F., Ye, D. and Song, S. (2020). Design of a Legged
and Clamper-Based Capsule Robot With Active
Locomotion Function. Journal of Medical Devices,
15(1).
Zhang, Y., Yang, H., Yang, D., Liu, X. and Liu, Z. (2020).
Polynomial profile optimization method of a
magnetic petal-shaped capsule robot. Mechatronics,
65, 102309.
Zhang, Y., Yu, Z., Yang, H., Huang, Y. and Chen, J. (2017).
Orthogonal transformation operation theorem of a
spatial universal uniform rotating magnetic field and
its application in capsule endoscopy. Science China
Technological Sciences, 60(6):854-864.
Zygomalas, A., Giokas, K. and Koutsouris, D. (2014). In
Silico Investigation of a Surgical Interface for
Remote Control of Modular Miniature Robots in
Minimally Invasive Surgery. Minimally Invasive
Surgery, 2014:1-5.
Design of Intestinal Modular Robot and Dynamics Analysis of Its Docking Mechanism
235
