
Automatic Score in Archery Target Using Simple Image Processing
Method
Abidul Qohar , Reesa Akbar
a
and Akhmad Hendriawan
Politeknik Elektronika Negeri Surabaya, Jalan Raya ITS, Surabaya, Indonesia
Keywords: Archery, Automatic Score Detection, Image Processing, OpenCV, Judging System, Camera, System
Development.
Abstract: In this paper we present our developing tool in archery for judging system, which is workable for outdoor and
indoor archery competition. The system used in this tool uses a camera to capture archery targets then the
frames obtained from the camera will be processed using the opencv library to get the score. We do a test
simulation program using opencv and python with video input as an experimental object. We have
successfully collected data from 4 subjects with different brightness settings. The results obtained using this
system for score detection accuracy is 96.55%. This paper introduces a new judging system with high
accuracy and displays the results.
1 INTRODUCTION
Archery is a sport with a long history that train focus
and composure. According to worldarchery.sport, the
first archery competition took place in Finsbury,
England in 1583 which was attended by around 3.000
participants. Furthermore, this sport was officially
included in the Olympics in 1900 for men and 1904
for women. In archery competition, the distance
between the archer and the target board is 70 meters
with the target board tilted 75 degrees to the ground
and the center height of the target board is 1.3 meters
from the ground. On the target there are 10 circles is
the same, from the center yellow, red, blue, black and
white. The determination of the score in the current
archery professional competition uses the Falco Eye
System, which is a laser scanning system to determine
the point of hitting the arrow on the target. This
system is an electronic target using lasers mounted on
the sides. This system is quite accurate, but
unfortunately quite expensive and not easy to move
because it weighs up to 86 kilograms. In amateur and
junior level archery competition, judges and trainers
manually determine the points earned by archers by
either using binoculars or by approaching the target
board to observe and validate the position of the
arrow (Humaid, et al., 2021).
a
https://orcid.org/0000-0001-7630-7760
In this paper, we would like to implement an
archery score detection system with low memory
usage and simpler method as in, in order to obtain the
most suitable to mount the installation and capture the
whole archer base target. Recently, the computer
vision is a new technology, which can provide more
convenient applications for users. Imaging
recognition is the key technology in vision for various
applications (Hsia, Wang, Cheng, & Chang, 2021).
Many researchers are interested in developing this
system because of its simplicity in determining
archery scores. Most of the papers and journals
published on the internet still detect scores using
images or videos that are processed to get the score
data. In journal published by Thi thi zin, Ikuo oka,
Takuya Sasayama and Shingo ata, the arrow detection
using image approach and the score calculation not
real time. The low computational complexity and the
easiness of implementation are the key advantages of
proposed method in the journal (Zin, et al., 2013).
Another journal discussing the topic of score
detection is published by Raymond Parag. The
journal discusses score detection in archery with a
video approach. The frame processed continuously to
predict the position of the arrow on the archery target
board based its color (Parag, 2017).Various methods
and techniques using OpenCV are discussed and
applied to detect and score the arrows. The target is
488
Qohar, A., Akbar, R. and Hendriawan, A.
Automatic Score in Archery Target Using Simple Image Processing Method.
DOI: 10.5220/0011816400003575
In Proceedings of the 5th International Conference on Applied Science and Technology on Engineering Science (iCAST-ES 2022), pages 488-492
ISBN: 978-989-758-619-4; ISSN: 2975-8246
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
detected by a color-based approach. The perspective
of the target is corrected by a homographic
transformation matrix and arrows are detected and
scored using the Hough lines Transform in
combination with a point in contour test.
2 IMAGE PROCESSING
TECHNIQUE
This paper provide research about score detection in
archery using image processing technique that
programmed by python language. The method used
in this paper divided in many process, there are
Background Subtraction, Morphological Operation,
Arrow Detection, Target Detection, and Scoring
Calculation. Detailed information about how we
calculate the score in archery using image processing
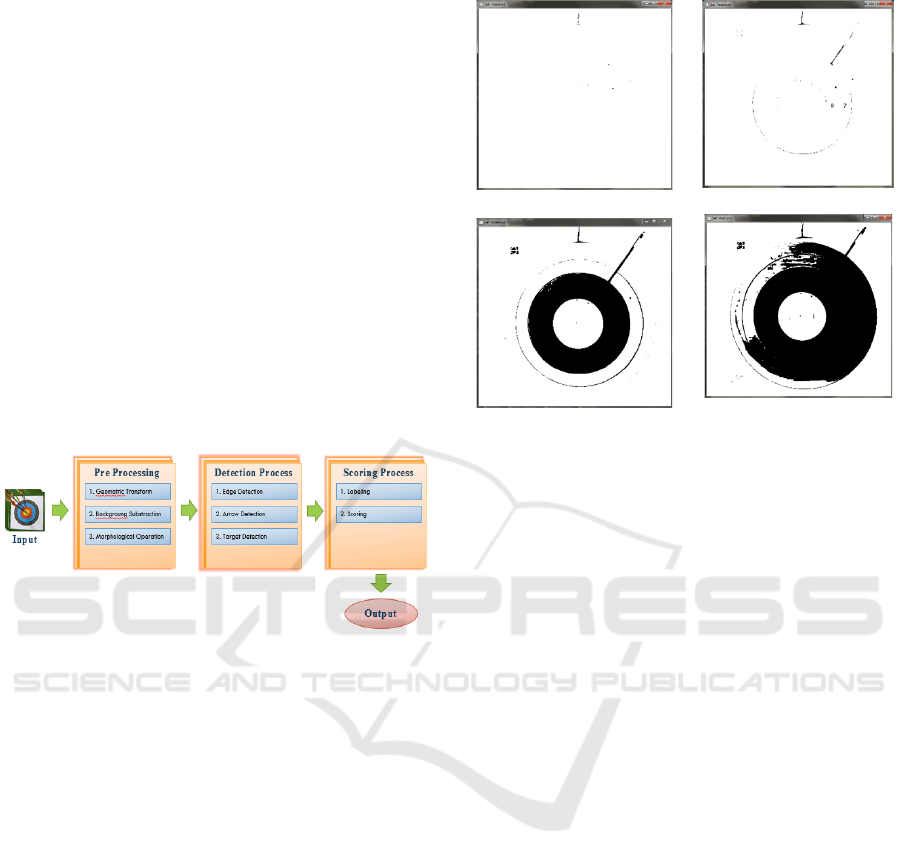
explained in Figure 1.
Figure 1: Method Proposed for Automatic Scoring System.
2.1 Background Subtraction
Background subtraction is an approach used to detect
moving objects in a sequence of frames from static
cameras. The base in this approach is that of detecting
moving objects from the difference between the
current frame and reference frame, which is often
called ‘Background Image’ or ‘Background Model’.
This task is the fundamental step in many visual
surveillance applications for which background
subtraction is a suitable solution which provide a
good compromise in terms of quality of detection and
computation time (Bouwmans & Garcia, 2019).
Frame difference is used to estimate the background
image by comparing the previous frame with the
current frame. This approach can be used when
segment motion-based objects such as arrow
movement, cars, pedestrians etc. And it is very
sensitive to threshold value settings. Therefore there
are limitation usage depending on object structure,
frame rate and global threshold. Figure 2 is some
cases of this approach based on threshold values.
Threshold = 30
Threshold = 50
Threshold = 80
Threshold = 100
Figure 2: Approach based on threshold value.
From Figure 2 when threshold value is set to 30, the
circle is not visible compared to when threshold value
at 100, the circle look clearer and easier to detect.
The common method used for background
subtraction is Mixture of Gaussians. The Mixture of
Gaussians is a mixture of k Gaussians distribution
models for each background pixel with values for k
within 3 and 5. The inventor assumes that different
distributions each represent the different background
colors and foreground colors. The weight of each one
of those used distributions on the model is
proportional to the amount of time each color stays on
pixel. Therefore when the weight of pixel distribution
is low, the pixel is classified as a foreground pixel.
2.2 Morphological Operations
Morphology is a vast extent of image processing
operations that modifies the images based on shapes.
It is considered to be one of the data processing
methods useful in image processing (Priya & Kadhar,
2017). Morphological operations apply a structuring
element to an input image, creating an output image
of the same size. In a morphological operation, the
value of each pixel in the output image is based on a
comparison of the corresponding pixel in the input
image with its neighbors. The most basic
morphological operations are dilation and erosion.
Dilation adds pixels to the boundaries of objects in an
image, while erosion removes pixels on object
boundaries. The number of pixels added or removed
from the objects in an image depends on the size and
shape of the structuring element used to process the
Automatic Score in Archery Target Using Simple Image Processing Method
489
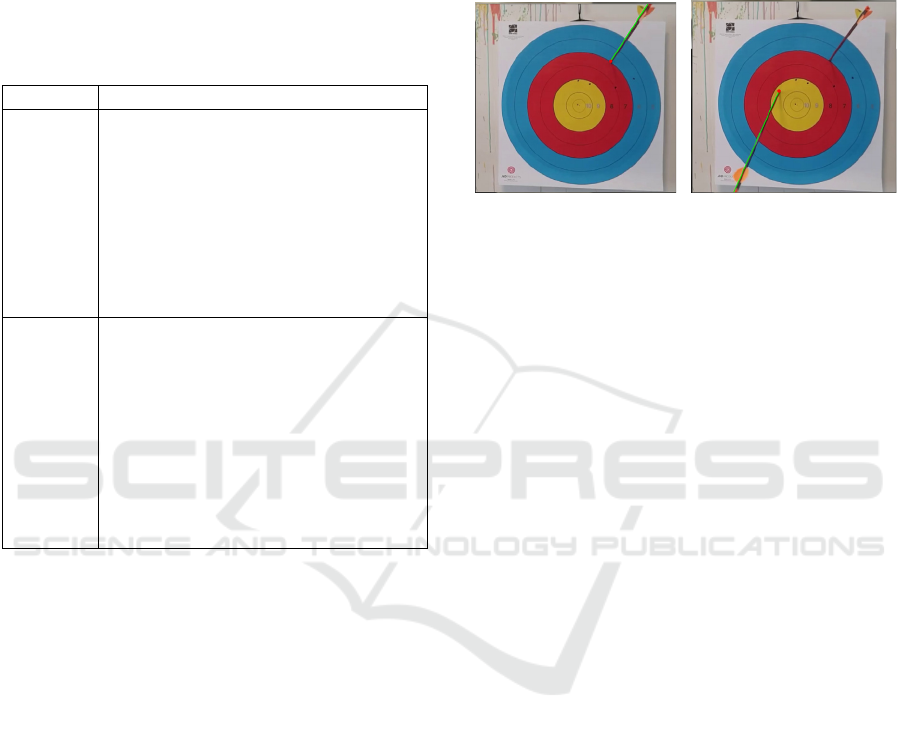
image. In the morphological dilation and erosion
operations, the state of any given pixel in the output
image is determined by applying a rule to the
corresponding pixel and its neighbors in the input
image. The rule used to process the pixels defines the
operation as a dilation or an erosion. Table 1 is lists
of the rules for both dilation and erosion (Priya &
Kadhar, 2017).
Table 1: Rules of dilation an erosion.
Operation Rules
Dilation The value of the output pixel is
the maximum value of all pixels in the
neighborhood. In a binary image, a
pixel is set to ‘1’ if any of the
neighboring pixels have the value ‘1’.
Morphological dilation makes objects
more visible and fills in small holes in
objects. The lines appear thicker, and
filled shapes appear lar
g
er.
Erosion The value of the output pixel is
the minimum value of all pixels in the
neighborhood. In a binary image, a
pixel is set to ‘0’ if any of the
neighboring pixels have the value ‘0’.
Morphological erosion remove
floating pixels and thin lines so that
only substantive objects remain. The
remaining lines appear thinner and
shapes appear smaller.
2.3 Arrow Detection
Arrow detection in this paper using data obtained
from background subtraction and hough line method.
When another object enters the frame, that object will
be considered as an arrow that sticks to the target of
the archery. From the detection of arrows using the
hough line method, two coordinates will be obtained
which are the coordinates of the start of the line
(assume as “a” coordinate) and the end of the line
(assume as “b” coordinate). After we get the data, the
next step is to look for the contours of the arrows as
parameters to capture images or only 1 frame is
processed, this is to minimize the use of cpu so that it
is not too big. Early approaches to contour detection
aim at quantifying the presence of a boundary at a
given image location through local measurements
(Arbelaez, Maire, Fowlkes, & Malik, 2011).
To determine the end of the arrowhead, the
approximation of the coordinates of center circle is
used. If coordinate "a" is closer to the center of the
target than coordinate "b", then point "a" is the
arrowhead and point b is the arrow's tail, and vice
versa. The center of the archery target is obtained
based on the target detection method described in
section 2.4. This arrow detection test is very crucial
in determining the score in this scoring process. The
accuracy of the arrowhead tip detection will affect the
accuracy of the score detection obtained.
Figure 3: Arrow head detection using approximation of the
coordinates of center circle.
2.4 Target Detection and Scoring
Calculation
After the arrow head point is found or detected, the
system need to find in which ring this point is located
(Danielescu, 2021). Archery target testing aims to
detect score circles which will be used as an important
component in detecting archery scores. The method
used in detecting circles on archery targets is the
hough circle method. From this method, the radius
and coordinates of the center point of the circle will
be obtained. To get more accurate results, it is
necessary to first set the threshold of the frame. The
score circles obtained from detection using the hough
circle method will later be compared with the position
of the tip of the arrow obtained previously and then
the score for the arrow will be obtained.
Calculating the archery score is obtained by
comparing the results of the previous steps. That is by
measuring the radius from the arrowhead to the
coordinates of the center of the circle compared to the
radius of each circle.
3 EXPERIMENTS AND
SIMULATIONS RESULT
In this experiment and simulation, video input is used
to detect scores on the archery target board. There are
4 arrows that are the object of the experiment in
determining the accuracy from the method proposed
in this paper. Then experiment by giving different
light conditions to see the difference in accuracy
obtained.
iCAST-ES 2022 - International Conference on Applied Science and Technology on Engineering Science
490

3.1 Score Detection
Score detection is the final process in this paper. The
calculation used in determining the score in this paper
uses data obtained from the previous process. The
score calculation is carried out by comparing
coordinates of the arrowheads in the radius of rings.
The results are shown in Figure 4 until Figure 7.
Figure 4: Score detection on the first arrow by calculate the
radius from the arrowhead to the center of circle.
Figure 5: Score detection on the second arrow by calculate
the radius from the arrowhead to the center of circle.
Figure 6: Score detection on the third arrow by calculate the
radius from the arrowhead to the center of circle.
Figure 7: Score detection on the fourth arrow by calculate
the radius from the arrowhead to the center of circle.
Table 2: Score detection accuracy.
Arrow
N
umbe
r
Score Actual Score Detecte
d
1 7 7
2 9 9
3 7 6
4 7 6
Total 30 28
Accurac
y
93.33%
3.2 Various Brightness
This experiment aims to see whether the intensity of
the light given affects the accuracy of detecting scores
on archery targets. There are 2 experimental objects
with different light intensity, among others, by
increasing the brightness of +10, and +40. From this
experiment, the following results were obtained.
Figure 8: Brightness increasing by +10.
Table 3: Score detection accuracy with brightness
increasing by +10.
Arrow Numbe
r
Score Actual Score Detecte
d
1 7 7
2 9 9
3 7 6
4 7 7
Total 30 28
Accurac
y
96.66%
Automatic Score in Archery Target Using Simple Image Processing Method
491
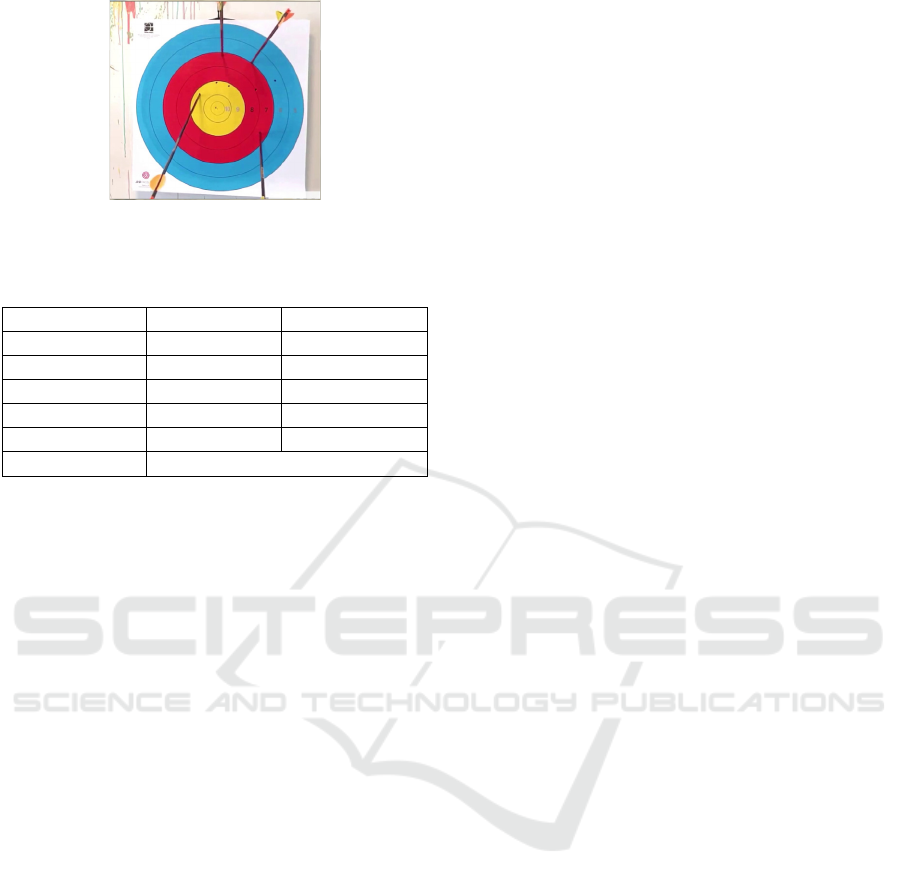
Figure 9: Brightness increasing by +40.
Table 4: Score detection accuracy with brightness
increasing by +40.
Arrow Numbe
r
Score Actual Score Detecte
d
1 7 7
2 9 8
3 7 6
4 7 4
Total 30 25
Accurac
y
83.33%
4 CONCLUSIONS
In this paper, we have proposed score detection in
archery target using simple image processing method.
The experimental results show that in terms of
performance, the program for score detection is
running well. However, the light conditions need to
be adjusted to get higher accuracy. This research will
be very well implemented in stable lighting
conditions. This paper can help referees determine
scores in archery so that the time spent in judging can
be more effective. In future, the automatic lightning
calibration will be included to increase the accuracy
of the system.
REFERENCES
Arbelaez, P., Maire, M., Fowlkes, C., & Malik, J. (2011).
Contour Detection and Hierarchical Image
Segmentation. IEEE Transactions on Pattern Analysis
and Machine Intelligence, (pp. 898-916).
doi:10.1109/TPAMI.2010.161
Bouwmans, T., & Garcia, B. (2019). Background
Substraction in reak Applications: Challenges, Current
Models and Future Directions. Cornell University.
doi:https://doi.org/10.48550/arXiv.1901.03577
Chudasama, D., Patel, T., & Joshi, S. (2015). Image
Segmentation using Morphological Operations.
International Journal of Computer Applications, 117,
pp. 16-19. Bharuch. doi:10.5120/20654-3197
Danielescu, L. A. (2021). OnTarget: An Electronic Archery
Scoring System. Cornell University.
doi:https://doi.org/10.48550/arXiv.2104.01622
Hsia, S.-C., Wang, S.-H., Cheng, W.-C., & Chang, C.-Y.
(2021). Intelligent Blowgun Game Scoring Recognition
System Based on Computer Vision. IEEE Access, 9, pp.
73703-73712.
doi:https://doi.org/10.1109/ACCESS.2021.3081457
Humaid, H., Pelana, R., Wendy, C.-S., Winata, B., Yulianti,
E., Wattimena, F. Y., & Artono, E. (2021). Validity of
the Scoring System Technology for Detecting Points in
Archery. Journal of Physical Education and Sport,
21(3), 1520-1524. doi:10.7752/jpes.2021.03193
Parag, R. (2017). Sequential Recognition and Scoring of
Archery Shots. Leiden University. Retrieved from
https://theses.liacs.nl/pdf/RaymondParag.pdf
Priya, M. S., & Kadhar, N. (2017). Effective Morphological
Image Processing Techniques and Image
Reconstruction. National Conference on "Digital
Transformation-Challenges and Outcomes" (ASAT in
CS'17). Bangalore.
Zin, T. T., Oka, I., Sasayama, T., Ata, S., Watanabe, H., &
Sasano, H. (2013). Image processing Approach to
automatic Scoring System for Archery Targets. In 2013
Ninth International Conference on Intelligent
Information Hiding and Multimedia Signal Processing
(pp. 259-262). IEEE. doi:https://doi.org/10.1109/IIH-
MSP.2013.73
iCAST-ES 2022 - International Conference on Applied Science and Technology on Engineering Science
492
