
Training Neural Networks in Single vs. Double Precision
Tomas Hrycej, Bernhard Bermeitinger
a
and Siegfried Handschuh
b
Institute of Computer Science, University of St. Gallen (HSG), St. Gallen, Switzerland
Keywords:
Optimization, Conjugate Gradient, RMSprop, Machine Precision.
Abstract:
The commitment to single-precision floating-point arithmetic is widespread in the deep learning community.
To evaluate whether this commitment is justified, the influence of computing precision (single and double
precision) on the optimization performance of the Conjugate Gradient (CG) method (a second-order optimiza-
tion algorithm) and Root Mean Square Propagation (RMSprop) (a first-order algorithm) has been investigated.
Tests of neural networks with one to five fully connected hidden layers and moderate or strong nonlinearity
with up to 4 million network parameters have been optimized for Mean Square Error (MSE). The training
tasks have been set up so that their MSE minimum was known to be zero. Computing experiments have dis-
closed that single-precision can keep up (with superlinear convergence) with double-precision as long as line
search finds an improvement. First-order methods such as RMSprop do not benefit from double precision.
However, for moderately nonlinear tasks, CG is clearly superior. For strongly nonlinear tasks, both algorithm
classes find only solutions fairly poor in terms of mean square error as related to the output variance. CG
with double floating-point precision is superior whenever the solutions have the potential to be useful for the
application goal.
1 INTRODUCTION
In the deep learning community, the use of sin-
gle precision computing arithmetic (the float32 for-
mat) became widespread. This seems to result from
the observation that popular first-order optimization
methods for deep network training (steepest gradi-
ent descent methods) do not sufficiently benefit from
a precision gain if the double-precision format is
used. This has even led to a frequent commitment
to hardware without the capability of directly per-
forming double-precision computations. For convex
minimization problems, the second-order optimiza-
tion methods are superior to the first-order ones in
convergence speed. As long as convexity is given,
their convergence is superlinear –– the deviation from
the optimum in decimal digits decreases as fast as or
faster than the number of iterations. This is why it is
important to assess whether and how far the accuracy
of the second-order methods can be improved by us-
ing double precision computations (that are standard
in many scientific and engineering solutions).
a
https://orcid.org/0000-0002-2524-1850
b
https://orcid.org/0000-0002-6195-9034
2 SECOND-ORDER
OPTIMIZATION METHODS:
FACTORS DEPENDING ON
MACHINE PRECISION
Second-order optimization methods are a standard
for numerical minimization of functions with a sin-
gle local minimum. A typical second-order method
is the Conjugate Gradient (CG) algorithm (Fletcher
and Reeves, 1964). (There are also attempts to de-
velop dedicated second-order methods, e.g., Hessian-
free optimization (Martens, 2010).) In contrast to the
first-order methods, it modifies the actual gradient in
a way such that the progress made by previous de-
scent steps is not spoiled in the actual step. The algo-
rithm is stopped if the gradient norm is smaller than
some predefined small constant. CG has the prop-
erty if previous descent steps have been optimal in
their descent direction, that is if a precise minimum
has been reached in this direction. This is reached by
a one-dimensional optimization subroutine along the
descent direction, called line search. Line search suc-
cessively maintains three points along this line, the
middle of which has a lower objective function value
than the marginal ones. The minimization is done by
shrinking the interval embraced by the three points.
Hrycej, T., Bermeitinger, B. and Handschuh, S.
Training Neural Networks in Single vs. Double Precision.
DOI: 10.5220/0011577900003335
In Proceedings of the 14th International Joint Conference on Knowledge Discovery, Knowledge Engineering and Knowledge Management (IC3K 2022) - Volume 1: KDIR, pages 307-314
ISBN: 978-989-758-614-9; ISSN: 2184-3228
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
307

The stopping rule of line search consists in specifying
the width of this interval at which the minimum has
been reached with sufficient precision. The precision
at which this can be done is limited by the machine
precision. Second-order methods may suffer from in-
sufficient machine precision in several ways related to
the imprecision of both gradient and objective func-
tion value computation:
• The lack of accuracy of the gradient computation
may lead to distorted descent direction.
• It may also lead to a premature stop of the algo-
rithm since the vanishing norm can be determined
only with limited precision.
• It may lead to wrong embracing intervals of line
search (e.g., with regard to the inequalities be-
tween the three points).
• It may also lead to a premature stop of line search
if the interval width reduction no longer succeeds.
There are two basic parameters to control the com-
putation of the CG optimization: There is a thresh-
old for testing the gradient vector for being close to
zero. This parameter is usually set at a value close to
the machine precision, for example, 10
−7
for single-
precision and 10
−14
for double-precision. The only
reason to set this parameter to a higher value is to tol-
erate a less accurate solution for economic reasons.
Another threshold defines the width of the interval
embracing the minimum of line search. Following the
convexity arguments presented in (Press et al., 1992),
this threshold should not be set to a lower value than
a square root of machine precision to prevent use-
less line search iterations hardly improving the min-
imum. Its value is above 10
−4
for single precision
and 3 ×10
−8
for double precision (Press et al., 1992).
There may be good reasons to use even higher thresh-
olds: low values lead to more line search iterations per
one gradient iteration. Under overall constraints of
computing resources such as limiting the number of
function calls, it may be more efficient to accept a less
accurate line search minimum, gaining additional gra-
dient iterations. The experiments have shown that the
influence of the tolerance parameter is surprisingly
low. There is a weak preference for large tolerances.
This is why the tolerance of 10
−1
has been used for
both single and double precision in the following ex-
periments. The actual influence in the typical neural
network optimization settings can be evaluated only
experimentally. To make the results interpretable, it
is advantageous to use training sets with known min-
imums. They can be generated in the following way:
1. Define a neural network with specified (e.g., ran-
dom) weights.
2. Define a set of input values.
3. Determine the output values resulting from the
forward pass of the defined network.
4. Set up a training set consisting of the defined input
values and the corresponding computed results.
This training set is guaranteed to have a minimum er-
ror of zero.
3 CONTROLLING THE EXTENT
OF NONLINEARITY
It can be expected that the influence of machine pre-
cision depends on the problem. The most important
aspect is the problem size. Beyond this, the influence
can be different for relatively easy problems close to
convexity (nearly linear mappings) on one hand and
strongly non-convex problems (nonlinear mappings).
This is why it is important to be able to generate prob-
lems with different degrees of non-convexity. The
tested problems are feedforward networks with one,
two, or five consecutive hidden layers, and a linear
output layer. The bias is ignored in all layers. All
layers are fully connected. For the hidden layers, the
symmetric sigmoid with unity derivative at x = 0 has
been used initially as the activation function:
2
1 + e
−2x
−1 (1)
Both input pattern values and network weights
used for the generation of output patterns are drawn
from the uniform distribution. The distribution of in-
put values is uniform on the interval
h
a, b
i
=
h
−1, 1
i
whose mean value is zero and variance is
b
3
−a
3
3(b −a)
=
1
3
(2)
To control the degree of nonlinearity during train-
ing data generation, the network weights are scaled
by a factor c so that they are drawn from the uniform
distribution
h
−c, c
i
. The variance of the product of an
input variable x and its weight w is
1
4c
Z
c
−c
Z
1
−1
(wx)
2
dxdw =
1
4c
Z
c
−c
w
2
2
3
dw
=
1
6c
Z
c
−c
w
2
dw
=
1
6c
2c
3
3
=
c
2
9
(3)
For large N, the sum of N products w
i
x
i
converges
to the normal distribution with variance N
c
2
9
and stan-
dard deviation
√
N
c
3
. This sum is the argument of the
KDIR 2022 - 14th International Conference on Knowledge Discovery and Information Retrieval
308

sigmoid activation function of the hidden layer. The
degree of nonlinearity of the task can be controlled
by a normalized factor d such that c =
d
√
N
, resulting
in the standard deviation
d
3
of the sigmoid argument.
In particular, it can be evaluated which share of acti-
vation arguments is larger than a certain value. Con-
cretely, about twice the standard deviation or more is
expected to occur in 5 % of the cases.
If a sigmoid function in form eq. (1) is directly
used, its derivative is close to zero with values of in-
put argument x approaching 2. For normalizing factor
d = 2, the derivative is lower than 0.24 at 5 % of the
cases, compared to the derivative of unity for x = 0.
For normalizing factor d = 4, the derivative is lower
than 0.02 at 5 % of the cases. The vanishing gradient
problem is a well-known obstacle to the convergence
of the minimization procedure. The problem can be
alleviated if the sigmoid is supplemented by a small
linear term defining the guaranteed minimal deriva-
tive.
(1 −h)
2
1 + e
−2x
−1
+ hx (4)
For such sigmoid without saturation with h =
0.05, the derivatives are more advantageous: For nor-
malizing factor d = 2, the derivative is lower than 0.28
at 5 % of the cases, compared to the derivative of unity
for x = 0. For normalizing factor d = 4, the derivative
is lower than 0.07 at 5 % of the cases.
This activation function eq. (4) is used for the
strongly nonlinear training scenarios.
4 COMPARISON WITH
RMSPROP
In addition to comparing the performance of the CG
algorithm (as a representative of second-order opti-
mization algorithms) with alternative computing pre-
cisions, it is interesting to know how competitive
the CG algorithm is compared with other popular
algorithms (mostly first-order). Computing experi-
ments with the packages TensorFlow/Keras (Tensor-
Flow Developers, 2022; Chollet et al., 2015) and var-
ious default optimization algorithms suggest a clear
superiority of one of them: Root Mean Square Prop-
agation (RMSprop) (Hinton, 2012). In fact, this al-
gorithm was the only one with performance compara-
ble to CG. Other popular algorithms such as Stochas-
tic Gradient Descent (SGD) were inferior by several
orders of magnitude. This makes a comparison rel-
atively easy: CG is to be contrasted to RMSprop.
RMSprop modifies the simple fixed-step-length gra-
dient descent by adding a scaling factor
p
d
t,i
depend-
ing on the iteration t and the network parameter ele-
ment index i.
w
t+1,i
= w
t,i
−
c
p
d
t,i
∂E (w
t,i
)
∂w
t,i
d
t,i
= gd
t−1,i
+ (1 −g)
∂
E (w
t−1,i
)
∂w
t−1,i
2
(5)
This factor corresponds to the weighted norm of the
derivative sequence of the given parameter vector el-
ement. In this way, it makes the steps of parame-
ters with small derivatives larger than those with large
derivatives. If the convex error function is imagined
to be a “bowl”, it makes a lengthy oval bowl more cir-
cular and thus closer to a normalized problem. It is
a step toward the normalization done by CG but only
along the axes of individual parameters, not their lin-
ear combinations.
5 COMPUTING RESULTS
The CG method (Press et al., 1992) with Brent line
search has been implemented in C and applied to the
following computing experiments. It has been veri-
fied by form published in (Nocedal and Wright, 2006)
(implemented in the scientific computing framework
SciPy (Virtanen et al., 2020)), with the line search al-
gorithm from (Wolfe, 1969).
Amendments of CG dedicated to optimize neural
networks have also been proposed: K-FAC (Martens
and Grosse, 2015), EKFAC (George et al., 2021),
or K-BFGS (Ren et al., 2022). They may possibly
improve the performance of CG in comparison to
RMSprop.
All training runs are optimized with a limit of
3,000 epochs for tasks with up to four million pa-
rameters. Smaller tasks had around 30,000, 300,000,
and 1 million parameters. The configuration of the
reported largest networks with one or five hidden lay-
ers can be seen in table 1. The mentioned epoch limit
cannot be satisfied exactly since the CG algorithm al-
ways stops after a complete conjugate gradient itera-
tion and thus a complete line search could consist of
multiple function/gradient calls. The number of gra-
dient calls is generally variable per one optimization
iteration, however, during the experiments they were
always evaluated as often as forward passes.
The concept of an epoch in both types of experi-
ments corresponds to one optimization step through
the full training data with exactly one forward and
one backward pass. For CG, the number of for-
ward/backward passes can vary independently and the
number of equivalent epochs is adapted accordingly:
a forward pass alone (as used in line search) counts
Training Neural Networks in Single vs. Double Precision
309

Table 1: The two different network configurations with four million parameters.
Name # Inputs # Outputs # Hidden Layers Hidden Layer Size # parameters
4mio-1h
4,000 2,000
1 680 4,080,000
4mio-5h 5 510 4,100,400
as one equivalent epoch while forward and backward
pass (as used in gradient computations) counts as two.
This is conservative with regard to the advantage of
the CG algorithm since the ratio between the comput-
ing effort for backward and forward passes is between
one and two, depending on the number of hidden lay-
ers. In a conservative C implementation, equivalent
epochs were roughly corresponding to the measured
computing time. For the reported result, a Tensor-
Flow/Keras implementation, a meaningful computing
time comparison has not been possible because of the
different usage of both methods: RMSprop as an op-
timized built-in method against embedding CG via
SciPy which adds otherwise unnecessary data oper-
ations.
The computing expense relationship between sin-
gle and double precision depends on the hardware and
software implementations. A customary notebook,
where these computations have been performed in C,
there was no difference between both machine preci-
sions. Other configurations may require more time for
double precision, by a factor of up to four.
With this definition, CG can be handicapped by
up to 33 % in the following reported results. In the
further text, epochs refer to equivalent epochs.
Using higher machine precision with first-order
methods, including RMSprop, brings about no sig-
nificant effect. Rough steps in the direction of the
gradient, modified by equally rough scaling coeffi-
cients, whose values are strongly influenced by user-
defined parameters such as g in (eq. (5)) do not benefit
from high precision. In none of our experiments with
both precisions, there was a discernible advantage by
double-precision. This is why the following compari-
son is shown for
• single and double precision CG method and
• single precision RMSprop.
To assess the optimization performance, statis-
tics over large numbers of randomly generated tasks
would have to be performed. However, resource limi-
tations of the two implementation frameworks do not
allow such a consequent approach for large networks
with at least millions of parameters. And it is just
such large networks for which the choice of the op-
timization method is important. This is why several
tasks of progressively growing size have been gener-
ated for networks with depths of one, two, and five
hidden layers, one for each combination of size and
depth. Every task has been run with single and dou-
ble precision. In the following, only the results for the
largest network size are reported since no significant
differences have been observed for smaller networks.
The networks with two hidden layers behave like a
compromise between a single hidden layer and five
hidden layers and are thus also omitted from the pre-
sentation.
Random influences affecting such well-defined al-
gorithms as CG are to be taken into account when in-
terpreting the differences between the attempts. The
convexity condition can be (and frequently is) vio-
lated so that better algorithms may be set to a sub-
optimal search path for some time. For the final result
to be viewed as better, the difference must be signifi-
cant. Intuitively, differences by an order of magnitude
or more can be taken as significant while factors of
three, two, or less are not so — they may turn to the
opposite if provided some additional iterations.
To make the minimum Mean Square Error (MSE)
reached practically meaningful, the results are pre-
sented as a quotient Q of the finally attained MSE
and the training set output variance. In this form, the
quotient corresponds to the complement of the well-
known coefficient of determination R
2
, which is the
ratio of the variability explained by the model to the
total variability of output patterns. The relationship
between both is
Q =
MSE
Var(y)
= 1 −R
2
(6)
If Q is, for example, 0.01, the output can be predicted
by the trained neural network model with an MSE
corresponding to 1 % of its variance.
5.1 Moderately Nonlinear Problems
Networks with weights generated with nonlinearity
parameter d = 2 (see section 3) can be viewed as mod-
erately nonlinear.
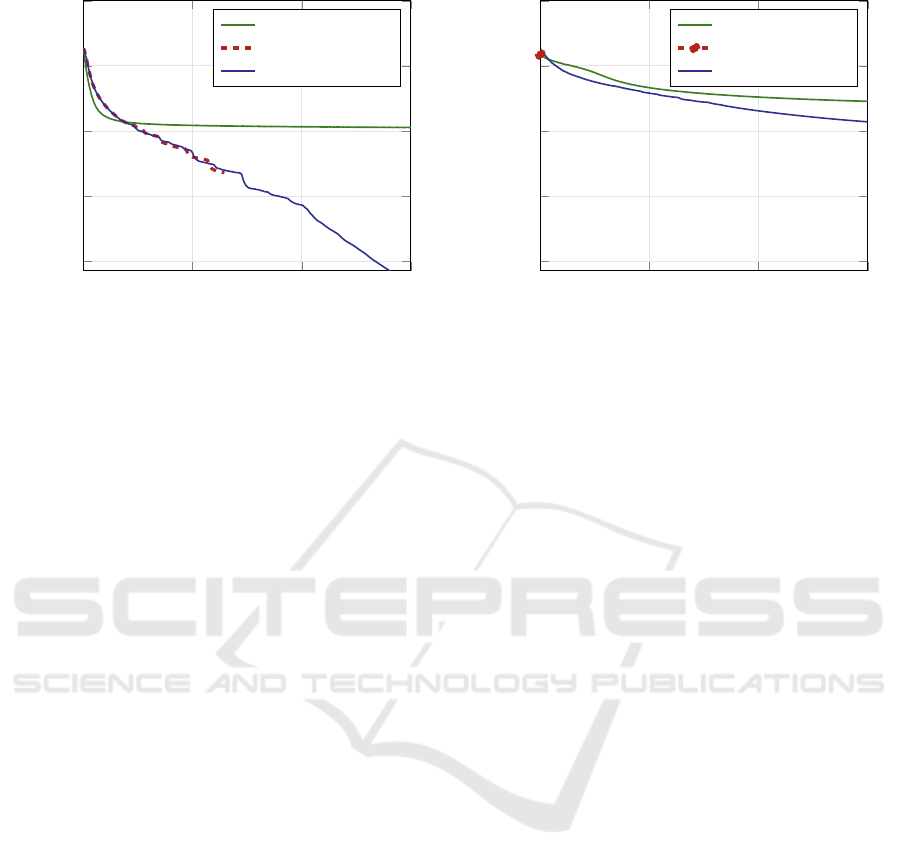
Figure 1 shows the attained loss measure defined
in eq. (6) as it develops with equivalent epochs. The
genuine minimum is always zero. The plots corre-
spond to RMSprop in single precision as well as to
CG in single and double precision. The networks con-
sidered have one (fig. 1a) and five (fig. 1b) hidden lay-
ers.
Optimization results with shallow (single-hidden-
layer) neural networks have shown that the minimum
KDIR 2022 - 14th International Conference on Knowledge Discovery and Information Retrieval
310
0 2,000 4,000
6,000
10
−7
10
−5
10
−3
10
−1
10
1
Epoch Equivalent
Loss
RMSprop (single)
CG (single)
CG (double)
(a) One hidden layer (4mio-1h), moderate nonlinearity.
0 2,000 4,000
6,000
10
−7
10
−5
10
−3
10
−1
10
1
Epoch Equivalent
Loss
RMSprop (single)
CG (single)
CG (double)
(b) Five hidden layers (4mio-5h), moderate nonlinearity.
Figure 1: The largest one/five-hidden-layer networks (four million parameters) with moderate nonlinearity, loss progress (in
log scale) in dependence on the number of epochs.
MSE (known to be zero due to the task definitions)
can be reached with a considerable precision of 10
−6
to 10
−20
even for the largest networks. While double-
precision computation is not superior to single preci-
sion for smaller networks (in a range of one order of
magnitude), the improvements for the networks with
one and four million parameters are in the range of
two to six orders of magnitude. The optimization
progress for the largest network, comparing the de-
pendence on the number epoch equivalents for single
and double-precision arithmetic is shown in fig. 1a.
With both precisions, CG exhibits superlinear
convergence property: between epochs 1,000 and
6,000, the logarithmic plot is approximately a straight
line. So every iteration leads to an approximately
fixed multiplicative gain of precision of the minimum
actually reached. The single-precision computation,
however, stops after 2,583 epochs (156 iterations) be-
cause line search can’t find a better result given the
low precision boundary. In other words, the line
search in single precision is less efficient. This would
be an argument in favor of double precision.
For the network with a single hidden layer, the CG
algorithm is clearly superior to RMSprop. The largest
network attains a minimum error precision better by
five orders of magnitude, and possibly more when in-
creasing the number of epochs. The reason is the su-
perlinear convergence of CG obvious from (fig. 1a).
It is interesting that in the initial phase, RMSprop
descends faster, quickly reaching the level that is no
longer improved in the following iterations.
However, with a growing number of hidden lay-
ers, the situation changes. For five hidden layers,
single-precision computations lag behind by two or-
ders of magnitude. The reason for this lag is different
from that observed with the single-hidden-layer tasks:
the single-precision run is prematurely stopped after
less than five CG iterations, because of no improve-
ment in the line search. This is why the line of the
loss for single-precision CG can hardly be discerned
in fig. 1b. By contrast, the double-precision run pro-
ceeds until the epoch limit is reached (655 iterations).
As seen in fig. 1b, the superlinear convergence
property with the double-precision computation is
satisfied at least segment-wise: a faster segment until
about 1,000 epoch equivalents and a slower segment
from epoch 4,000. Within each segment, the logarith-
mic plot is approximately a straight line. (Superlin-
earity would have to be rejected if the precision gain
factors would be successively slowing down, particu-
larly within the latter segment.)
For RMSprop, a lag behind the CG can be ob-
served with five hidden layers, but the advantage of
CG is minor — one order of magnitude. However, the
plot suggests that CG has more potential for further
improvement if provided additional resources. Once
more, RMSprop exhibits fast convergence in the ini-
tial optimization phase followed by weak improve-
ments.
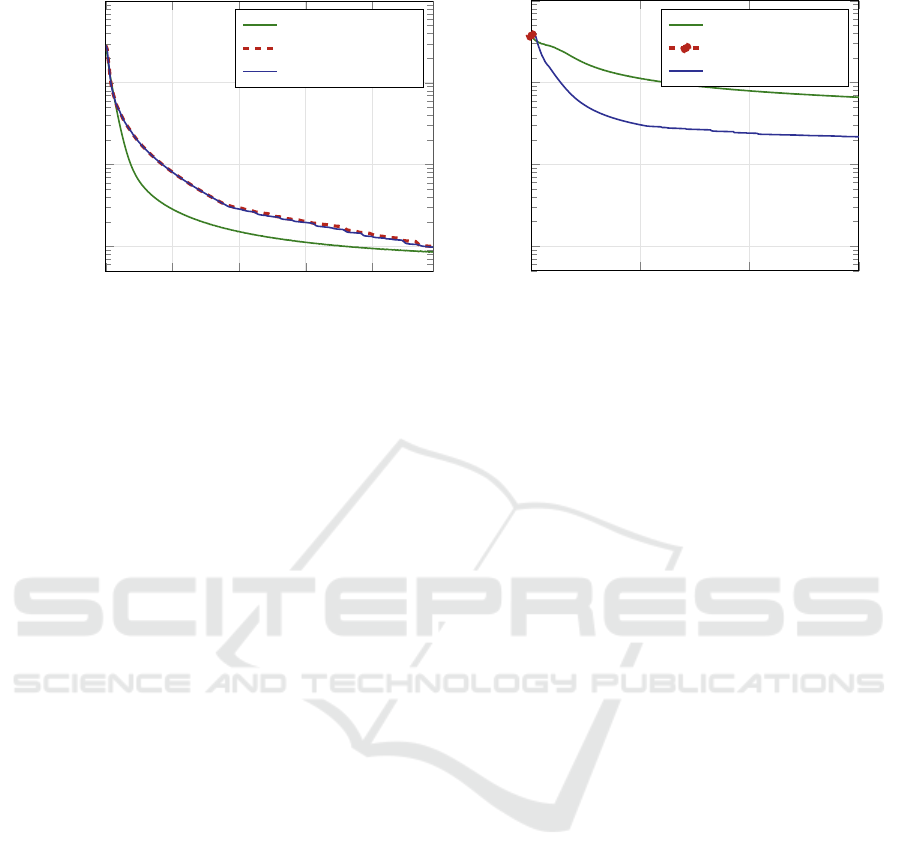
5.2 Strongly Nonlinear Problems
Mapping tasks generated with nonlinearity parameter
d = 4 imply strong nonlinearities in the sigmoid ac-
tivation functions with 5 % of activations having an
activation function derivative of less than 0.02. With
a linear term avoiding saturation (eq. (4)), this deriva-
tive grows to 0.07, a still very low value compared to
the unity derivative in the central region of the sig-
moid. The results are shown in fig. 2 in the struc-
Training Neural Networks in Single vs. Double Precision
311
0 1,000 2,000 3,000 4,000
10
−2
10
−1
10
0
10
1
Epoch Equivalent
Loss
RMSprop (single)
CG (single)
CG (double)
(a) One hidden layer (4mio-1h), strong nonlinearity.
0 2,000 4,000
6,000
10
−2
10
−1
10
0
10
1
Epoch Equivalent
Loss
RMSprop (single)
CG (single)
CG (double)
(b) Five hidden layers (4mio-5h), strong nonlinearity.
Figure 2: The largest one/five-hidden-layer networks (four million parameters) with strong nonlinearity, loss progress (in log
scale) in dependence on the number of epochs.
ture analogical to fig. 1. With CG, the parameter opti-
mization of networks of various sizes with one hidden
layer and two hidden layers shows no significant dif-
ference between single and double-precision compu-
tations. The attainable accuracy of the minimum has
been, as expected, worse than for moderately nonlin-
ear tasks but still fairly good: almost 10
−5
for a single
hidden layer and 10
−2
for two hidden layers.
The relationship between both CG and RMSprop
is similar for single-hidden-layer networks (fig. 2a)
— CG is clearly more efficient. The attainable preci-
sion of error minimum is, as expected, worse than for
moderately nonlinear tasks.
For five hidden layers, a similar phenomenon as
for moderately nonlinear tasks can be observed: the
single-precision computation stops prematurely be-
cause line search fails to find an improved value
(see fig. 2b). The minimum reached is in the same
region as the initial solution.
The convergence of both algorithms (CG and
RMSprop) is not very different with five hidden layers
— superiority of CG is hardly significant. Here, the
superlinear convergence of CG is questionable. The
reason for this may be a lack of convexity of the MSE
with multiple hidden layers and strongly nonlinear re-
lationships between input and output. It is important
to point out that the quality of the error minimum
found is extraordinarily poor: the MSE is about 10 %
of the output variance. This is 30 % in terms of stan-
dard deviation, which may be unacceptable for many
applications.
6 SUMMARY AND DISCUSSION
With the CG optimization algorithm, double preci-
sion computation is superior to single-precision in
two cases:
1. For tasks relatively close to convexity (single hid-
den layer networks with moderate nonlinearity),
the optimization progress with double-precision
seems to be faster due to a smaller number of
epochs necessary to reach a line search mini-
mum with a given tolerance. This allows the al-
gorithm to perform more CG iterations with the
same number of epochs. However, since both sin-
gle and double precision have the superlinear con-
vergence property, the gap can be bridged by al-
lowing slightly more iterations with single preci-
sion to reach a result equivalent to that of double
precision.
2. For difficult tasks with multiple hidden layers
and strong nonlinearities, a more serious flaw of
single-precision computation occurs: a premature
stop of the algorithm because of failing to find
an objective function improvement by line search.
This may lead to unacceptable solutions.
In summary, it is advisable to use double precision
with the second-order methods.
The CG optimization algorithm (with double pre-
cision computation) is superior to the first-order algo-
rithm RMSprop in the following cases:
1. Tasks with moderate nonlinearities. The advan-
tage of CG is large for shallow networks and less
pronounced for deeper ones. Superlinear conver-
KDIR 2022 - 14th International Conference on Knowledge Discovery and Information Retrieval
312

gence of CG seems to be retained also for the lat-
ter group.
2. Tasks with strong nonlinearities modeled by net-
works with a single hidden layer. Also here, su-
perlinear convergence of CG can be observed.
For tasks with strong nonlinearities and multiple hid-
den layers, both CG and RMSprop (which has been
by far the best converging method from those im-
plemented in the popular TensorFlow/Keras frame-
works) show very poor performance. This is docu-
mented by the square error attained, whose minimum
is known to be zero in our training examples. In prac-
tical terms, such tasks can be viewed as “unsolvable”
because the forecast error is too large in relation to the
output variability — the model gained does not really
explain the behavior of the output.
The advantage of RMSprop, if any, in some of the
strongly nonlinear cases is not very significant (fac-
tors around two). By contrast, for tasks with either
moderate nonlinearity or shallow networks, the CG
method is superior. In these cases, the advantage of
CG is substantial (sometimes several orders of mag-
nitude). So in the typical case where the extent of
nonlinearity of the task is unknown, CG is the safe
choice.
It has to be pointed out that tasks with strong
nonlinearities in individual activation functions are,
strictly speaking, intractable by any local optimiza-
tion method. Strong nonlinearities sum up to strongly
non-monotonous mappings. But square errors of non-
monotonous mappings are certain to have multiple lo-
cal minima with separate attractors. For large net-
works of sizes common in today’s data science, the
number of such separate local minima is also large.
This reduces the chance of finding the global min-
imum to a practical impossibility, whichever opti-
mization algorithms are used. So the cases in which
the CG shows no significant advantage are just those
“hopeless” tasks.
Next to the extent of nonlinearity, the depth of
the network is an important category where the alter-
native algorithms show different performances. The
overall impression that the advantage of the CG
method over RMSprop shrinks with the number of
hidden layers, that is, with the depth of the network,
may suggest the conjecture that it is not worth using
CG with necessarily double-precision arithmetic for
currently preferred deep networks (Heaton, 2018).
However, the argument has to be split into two dif-
ferent cases:
1. networks with fully connected layers
2. networks containing special layers, in particular
convolutional ones.
In the former case, the question is how far it is
useful to use multiple fully connected hidden layers at
all. Although there are theoretical hints that in some
special tasks, deep networks with fully connected lay-
ers may provide a more economical representation
than those with shallow architectures (Mont
´
ufar et al.,
2014) or (Delalleau and Bengio, 2011), the systematic
investigation of (Bermeitinger et al., 2019) has dis-
closed no usable representational advantage of deep
networks. In addition to it, deep networks are substan-
tially harder to train and thus exploit their representa-
tional potential. This can also be seen in the results
presented here. Networks with five hidden layers, al-
though known to have a zero error minimum, have not
been able to be trained to a square error of less than
10 % of the output variability. Expressed in standard
deviation, the standard deviation of the output error is
more than 30 % of the standard deviation of the output
itself. These 30 % do not correspond to noise inher-
ent to the task (whose error minimum is zero on the
training set) but to the error caused by the inability of
local optimization methods to find a global optimum.
This is a rather poor forecast. In the case of the out-
put being a vector of class indicators, the probability
of frequently confusing the classes is high. In this
context, it has to be pointed out that no exact meth-
ods exist for finding a global optimum of nonconvex
tasks of sizes typical for data science with many lo-
cal minima. The global optimization of such tasks is
an NP-complete problem with solution time exponen-
tially growing with the number of parameters. This
documents the infeasibility of tasks with millions of
parameters.
Limitation to Fully Connected Networks. The
conjectures of the present work cannot be simply ex-
trapolated to networks containing convolutional lay-
ers — this investigation was concerned only with fully
connected networks. The reason for this scope limi-
tation is that it is difficult to select a meaningful pro-
totype of a network with convolutional layers, even
more one with a known error minimum — the archi-
tectures with convolutional layers are too diversified
and application-specific. So the question is which op-
timization methods are appropriate for training deep
networks with multiple convolutional layers but a low
number of fully connected hidden layers (maybe a
single one). This question cannot be answered here,
but it may be conjectured that convolutional layers are
substantially easier to train than fully connected ones,
for two reasons:
1. Convolutional layers have only a low number of
parameters (capturing the dependence within a
small environment of a layer unit).
Training Neural Networks in Single vs. Double Precision
313

2. The gradient with regard to convolutional param-
eters tends to be substantially larger than that
of fully connected layers since it is a sum over
all unit environments within the convolutional
layer. In other words, convolutional parameters
are “reused” for all local environments that make
their gradient grow.
This suggests a meaningful further work: to find
some sufficiently general prototypes of networks with
convolutional layers and to investigate the perfor-
mance of alternative optimization methods on them,
including the influence of machine precision for the
second-order methods.
REFERENCES
Bermeitinger, B., Hrycej, T., and Handschuh, S. (2019).
Representational Capacity of Deep Neural Networks:
A Computing Study. In Proceedings of the 11th Inter-
national Joint Conference on Knowledge Discovery,
Knowledge Engineering and Knowledge Management
- Volume 1: KDIR, pages 532–538, Vienna, Austria.
SCITEPRESS - Science and Technology Publications.
Chollet, F. et al. (2015). Keras.
Delalleau, O. and Bengio, Y. (2011). Shallow vs. Deep
Sum-Product Networks. In Advances in Neural Infor-
mation Processing Systems, volume 24. Curran Asso-
ciates, Inc.
Fletcher, R. and Reeves, C. M. (1964). Function minimiza-
tion by conjugate gradients. The Computer Journal,
7(2):149–154.
George, T., Laurent, C., Bouthillier, X., Ballas, N., and Vin-
cent, P. (2021). Fast Approximate Natural Gradient
Descent in a Kronecker-factored Eigenbasis.
Heaton, J. (2018). Ian Goodfellow, Yoshua Bengio, and
Aaron Courville: Deep learning. Genet Program
Evolvable Mach, 19(1):305–307.
Hinton, G. (2012). Neural Networks for Machine Learning.
Martens, J. (2010). Deep learning via Hessian-free opti-
mization. In Proceedings of the 27th International
Conference on International Conference on Machine
Learning, ICML’10, pages 735–742, Madison, WI,
USA. Omnipress.
Martens, J. and Grosse, R. (2015). Optimizing Neural Net-
works with Kronecker-factored Approximate Curva-
ture.
Mont
´
ufar, G. F., Pascanu, R., Cho, K., and Bengio, Y.
(2014). On the Number of Linear Regions of Deep
Neural Networks. In Ghahramani, Z., Welling, M.,
Cortes, C., Lawrence, N. D., and Weinberger, K. Q.,
editors, Advances in Neural Information Processing
Systems 27, pages 2924–2932. Curran Associates, Inc.
Nocedal, J. and Wright, S. J. (2006). Numerical Opti-
mization. Springer Series in Operations Research.
Springer, New York, 2nd ed edition.
Press, W. H., Teukolsky, S. A., Vetterling, W. T., and Flan-
nery, B. P. (1992). Numerical Recipes in C (2nd Ed.):
The Art of Scientific Computing. Cambridge Univer-
sity Press, USA.
Ren, Y., Bahamou, A., and Goldfarb, D. (2022). Kronecker-
factored Quasi-Newton Methods for Deep Learning.
TensorFlow Developers (2022). TensorFlow. Zenodo.
Virtanen, P., Gommers, R., Oliphant, T. E., Haberland, M.,
Reddy, T., Cournapeau, D., Burovski, E., Peterson, P.,
Weckesser, W., Bright, J., van der Walt, S. J., Brett,
M., Wilson, J., Millman, K. J., Mayorov, N., Nel-
son, A. R. J., Jones, E., Kern, R., Larson, E., Carey,
C. J., Polat,
˙
I., Feng, Y., Moore, E. W., VanderPlas,
J., Laxalde, D., Perktold, J., Cimrman, R., Henriksen,
I., Quintero, E. A., Harris, C. R., Archibald, A. M.,
Ribeiro, A. H., Pedregosa, F., van Mulbregt, P., and
SciPy 1.0 Contributors (2020). SciPy 1.0: Fundamen-
tal algorithms for scientific computing in python. Na-
ture Methods, 17:261–272.
Wolfe, P. (1969). Convergence Conditions for Ascent Meth-
ods. SIAM Rev., 11(2):226–235.
KDIR 2022 - 14th International Conference on Knowledge Discovery and Information Retrieval
314
