
Universally Hard Hamiltonian Cycle Problem Instances
Joeri Sleegers
1 a
, Sarah L. Thomson
2 b
and Daan van Den Berg
3 c
1
Mice & Man Software and A.I. Development, Amsterdam, The Netherlands
2
Department of Computing Science & Mathematics, University of Stirling, U.K.
3
Department of Computer Science, Vrije Universiteit Amsterdam, The Netherlands
Keywords:
Exact Algorithms, Instance Hardness, Evolutionary Algorithms, Phase Transition.
Abstract:
In 2021, evolutionary algorithms found the hardest-known yes and no instances for the Hamiltonian cycle
problem. These instances, which show regularity patterns, require a very high number of recursions for the
best exact backtracking algorithm (Vandegriend-Culberson), but don’t show up in large randomized instance
ensembles. In this paper, we will demonstrate that these evolutionarily found instances of the Hamiltonian cy-
cle problem are hard for all major backtracking algorithms, not just the Vandegriend-Culberson. We compare
performance of these six algorithms on an ensemble of 91,000 randomized instances plus the evolutionar-
ily found instances. These results present a first glance at universal hardness for this NP-complete problem.
Algorithms, source code, and input data are all publicly supplied to the community.
1 INTRODUCTION
In computing, some problems are considered inher-
ently difficult, while others are relatively easy. The
distinction between the two is in the runtime increase
for the most efficient algorithm on a problem.
As an example, finding the minimum spanning
tree on a graph of V vertices can be done by Kruskal’s
algorithm in at most O(log(V )) time, concretely
meaning that if the worst possible problem instance
of V = 10 vertices requires one second by your impe-
mentation of Kruskal’s algorithm, the worst possible
problem instance of 100 vertices requires two seconds
at most. Another example is finding a traveling sales-
man tour of at most 50% worse than the optimal solu-
tion, which can be done by Christofides-Serdyukov
algorithm in O(V
3
) time, concretely meaning that
if a solution for V = 10 cities on a map takes one
second, then a solution for V = 20 cities takes not
two but eight seconds. Both Kruskal’s algorithm and
Christofides-Serdyukov are considered polynomial-
time algorithms and if a problem has a polynomial-
time algorithm, we say ‘the problem is in P’.
But even though O(V
3
) might look like a bad in-
crease compared to O(log(V)), it is nothing compared
a
https://orcid.org/0000-0003-1701-6319
b
https://orcid.org/0000-0001-6971-7817
c
https://orcid.org/0000-0001-5060-3342
to the cost increase of an exponential-time algorithm.
For example, an exhaustive depth-first search for find-
ing a true-assignment to a 3CNFSAT Boolean for-
mula like (¬a ∨ b ∨ ¬c) ∧ (¬b ∨ ¬c ∨ d) takes O(2
n
)
time for n variables, as does finding the exact 2-
part split of set 141, 206, 391, 434, 591, 668, 779, 801
(Van Den Berg and Adriaans, 2021). These deci-
sion problems, where the size of the input problem
instance appears in the exponent, are all harder than
all polynomial-time problems, because even a very
small exponent will eventually outgrow a very large
polynomial as the instance size increases. These de-
cision problems, which have no known determinis-
tic polynomial-time algorithm, are said to be ‘NP-
complete’
1
. On account of these exponential in-
fluences, problems in NP (and more specifically
for this paper in NP-complete) are considered hard,
whereas problems in P are generally considered as
easy, though one could easily discutatorily peregri-
nate along the details, which we will joyfully do next.
Because as disheartening as NP(-completeness)
might seem, not all the instances of an NP-complete
problem are equally hard. In fact, when given the
right algorithm, only a small fraction of a randomized
instance ensemble is actually hard – at least for SAT,
1
In fact, an additional requirement for NP-completeness
is polynomial-time reduction of another NP-complete prob-
lem, which for narrative reasons, is omitted here. See e.g.
(Garey and Johnson, 2002).
Sleegers, J., Thomson, S. and van Den Berg, D.
Universally Hard Hamiltonian Cycle Problem Instances.
DOI: 10.5220/0011531900003332
In Proceedings of the 14th International Joint Conference on Computational Intelligence (IJCCI 2022), pages 105-111
ISBN: 978-989-758-611-8; ISSN: 2184-3236
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
105

Figure 1: (Right-hand side, large inset: The hardest no-instance of the Hamiltonian cycle problem, NonHam
0
, is a single
highly regular graph, which is bipartite when V is odd, and nearly so when V is even. Left-hand side, small inset: The
hardest yes-instances comprise a set of 27 non-isomorphic graphs (Ham
0
), which have varying edge densities (shown are
E = {55, 56, 57, 57, 58, 59}). Although these yes-instances also show a high degree of regularity, the minimum Hamming
distance from any of these graphs to NonHam
0
is 6.
the Hamiltonian cycle problem and graph colouring
(Cheeseman et al., 1991). Remarkably enough, these
hard instances were all found very close to the phase
transition in solvability.
Most if not all NP-complete problems have a solv-
ability phase transition through some ‘order parame-
ter’: a predictive data analytic that bestows an a pri-
ori probability of solvability upon the set of all in-
stances of size n for a problem. Satisfiability has
one; if the number of clauses in the formula outweigh
the number of variables by approximately α ≈ 4.26,
it probably has no solution, whereas lower values of
α mean it probably has (Larrabee and Tsuji, 1992;
Hayes, 1997). For Hamiltonian cycle problem in-
stances of size V , if the number of edges exceeds the
value of
1
2
V ln(V ) +
1
2
V ln(ln(V )) then Hamiltonicity
is highly likely; for lower values, the instance most
likely has no Hamiltonian cycle (Koml
´
os and Sze-
mer
´
edi, 1983)(van Horn et al., 2018). This sudden
transition in solvability turned out to be quite ubiqui-
tous for NP-complete problems, or as Ian Gent and
Toby Walsh put it: “[Indeed, we have yet to find an
NP-complete problem that lacks a phase transition]”
(Gent and Walsh, 1996). But an additional the qual-
ity of Hamiltonian cycle problem’s phase transition, is
that its phase transition is exactly characterized, both
by shape and location, in early work by J
´
anos Koml
´
os
and Endre Szemer
´
edi (Koml
´
os and Szemer
´
edi, 1983).
So why care about these solvability phase transi-
tions? Because that is where the hardest problem in-
stances were found; a famous result by Cheeseman,
Kanefsky & Taylor’s (henceforth: ‘Cetal’). For in-
stances close to the solvability phase transition, com-
putational resources abolutely skyrocketed, making
NP-completeness live up to its reputation. SAT for-
mulas with 100 variables and 426 clauses were typ-
ically hard to solve. Hamiltonian cycle problem in-
stances with 100 vertices and 307 edges were also
hard, as were 3-colorability graphs with a connectiv-
ity around 5.4 (Cheeseman et al., 1991). (The fig-
ures in Cetal’s paper are quite poor; for somewhat
better figures on SAT, please see (Hayes, 1997), for
the Hamiltonian cycle problem see (van Horn et al.,
2018) and for their traveling salesman experiment,
please see (Sleegers et al., 2020);). But the inverse
was also true: for problem instances far away from
the solvability phase transition, required computation
time was low, either because one of its many solutions
was quickly found, or a ‘no-solution’ dismissal was
readily reached. But for one NP-complete problem,
all this was about to change.
2 EXACT ALGORITHMS
The Hamiltonian cycle problem is a quintessential ex-
ample of an NP-complete problem. It comes in many
different shapes and forms, but in its most elemen-
tary formulation involves finding a path (a sequence
of distinct edges) in an undirected and unweighted
graph that visits every vertex exactly once, and forms
a closed loop.
A true classic, the problem already appeared on
Richard Karp’s infamous list of “21 NP-complete
problems” from 1972 (Karp, 1972) but interestingly
enough, a later edition of the same paper contains a
striking stipulation from Karp himself: “[I failed to
prove the NP-completeness of the undirected Hamil-
tonian cycle problem; that reduction was provided
independently by Lawler and Tarjan]” (Karp, 2008;
ECTA 2022 - 14th International Conference on Evolutionary Computation Theory and Applications
106
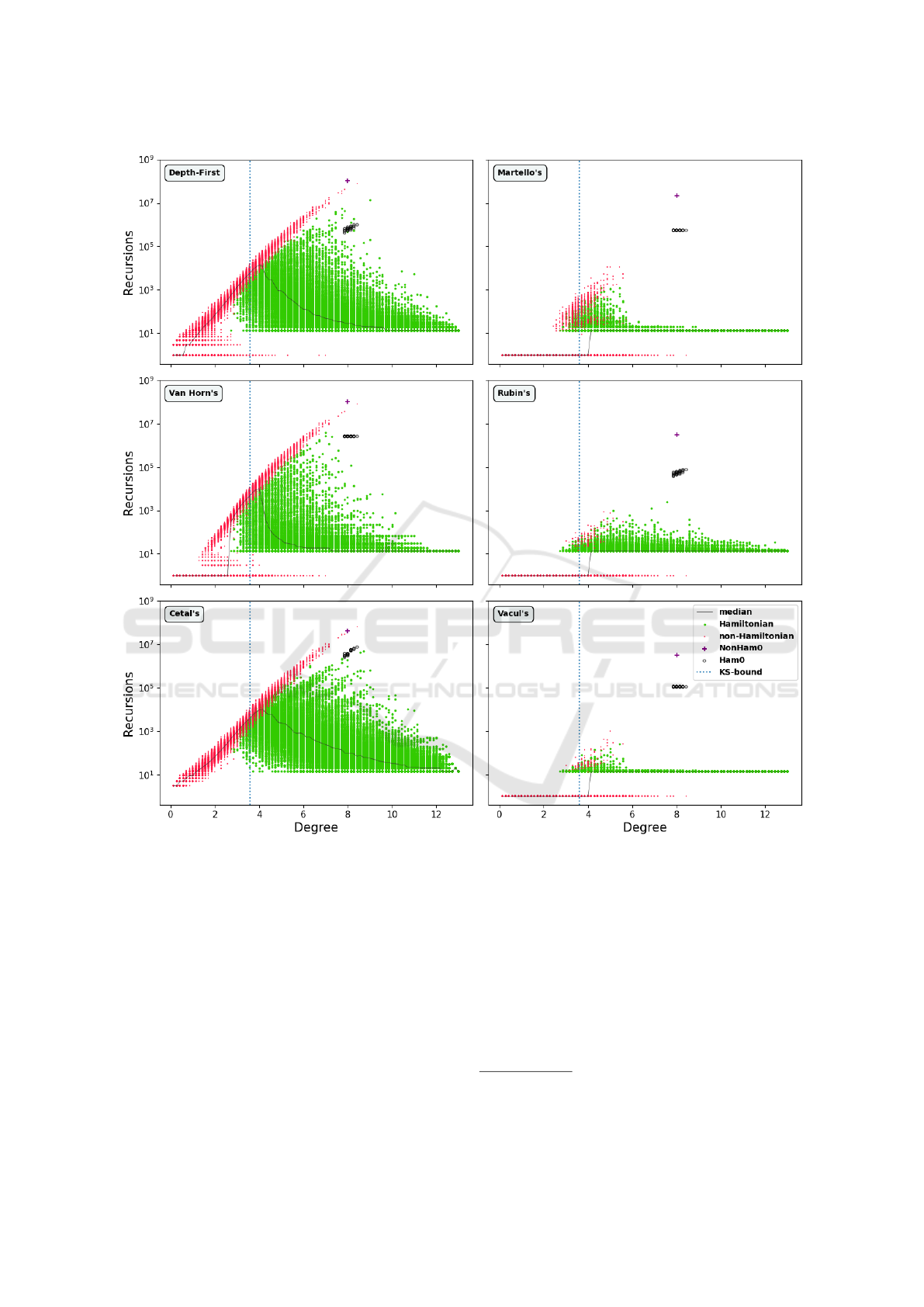
Figure 2: According to traditional views, the hardest Hamiltonian cycle problem instances lie close to its solvability phase
transition, the Koml
´
os-Szemer
´
edi-bound. Indeed this is true for large random ensembles, but a deliberate evolutionary search
for the hardest yes/no-instances found instances that are hard for all these algorithms, sometimes by several orders of magni-
tude than random ensembles (see markers for Ham
0
and NonHam
0
).
Karp, 1972) – the latter being Robert Tarjan, another
mastodont of computer science. His original publica-
tion seems hard to find, but Garey and Johnson pro-
vide a proof of the Hamiltonian cycle problem’s NP-
completeness from the vertex cover problem. A di-
rect transformation to the satisfiability problem (SAT)
is also possible, as shown for planar Hamiltonian cy-
cle problems in cubic graphs (which have maximum
vertex degree three)(Garey et al., 1976). Although
clever, the direct practicality could be compromised
by the large sizes of the Hamiltonian cycle problem
instances that can arise even from the transformation
of a single small SAT-instance. This principle, that in-
stance sizes need not hold under NP-complete trans-
formations is colloquially known as the ‘TommyGun
Theorem’.
Being NP-complete, the Hamiltonian Cycle prob-
lem has no known polynomial-time exact algorithm
2
.
2
An ‘exact algorithm’ for a decision problem such as
the Hamiltonian cycle problem, will always return a solu-
tion, given enough runtime.
Universally Hard Hamiltonian Cycle Problem Instances
107

In fact, the best upper bound was set by Richard Karp
himself, together with Michael Held, with a dynamic
programming algorithm that runs in O(n
2
2
n
) (Held
and Karp, 1962). Independently discovered and pub-
lished by Richard Bellman, it is still the fastest algo-
rithm for the worst-case instance, and hence has the
lowest known complexity – which is still exponential
(Bellman, 1962).
Although well-regarded, Held-Karp is by no
means the only exact algorithm for the Hamiltonian
cycle problem. In fact, a number of recursive back-
tracking algorithms have been devised through the
years. Plain depth-first search was invented far be-
fore any modern day computer in 1882. As early as
1974, the far more sophisticated Rubin’s algorithm
already contained a surprising number of efficient
subprocedures for non-Hamiltonicity checks (Rubin,
1974). Nine years later, an algorithm was proposed by
Sylvano Martello (Martello, 1983), who has a wide
track record with other NP-complete problems such
as (perfect) rectangle packing (Iori et al., 2021b; Iori
et al., 2021a; Iori et al., 2021c)(Braam and van den
Berg, 2022)(van den Berg et al., 2016). Martello’s
algorithm ’595’ is not particularly efficient, but not
nearly as bad as Cetal’s algorithm, probably the most
inefficient of them all (Cheeseman et al., 1991)(van
Horn et al., 2018).
Nevertheless, Cetal’s work had value: as an enor-
mous contribution to the awareness of hardness vari-
ation. An important note however, is that their ex-
periment on the traveling salesman problem instance
hardness was critically flawed due to a roundoff er-
ror (Sleegers et al., 2020). Even so, Cetal’s assess-
ment on the other three NP-complete problems (in
particular the Hamiltonian cycle problem) that hard
instances reside close to the yes/no phase transition
still, holds up for large randomized sets. If only they
had used Frank Rubin’s algorithm from 20 years ear-
lier, or even just Van Horn’s from 2018 (which is just
a basic inversion of Cetal’s (van Horn et al., 2018)),
their results might have taken a much larger step for-
ward.
But the best performance award turned out to
be reserved for Basil Vandegriend & Joe Culberson
(abbreviated to “Vacul”), whose Vacul’s algorithm,
even better than Frank Rubin’s, was published in
1998, and corroborated that even for that algorithm,
the hardest problem instances were close to the phase
transition (Vandegriend and Culberson, 1998). Fi-
nally, a comprehensive comparative study by Joeri
Sleegers showed that all the algorithms are quite sim-
ilar: backtracking algorithms with degree priority,
pruning and check subroutines switched on or off.
Sleegers, aided by modern day computation power,
generated large ensembles of random graphs, which
he ran through all six backtracking algorithms
3
, tying
up earlier findings, showing that the hardest instances
for all these algorithms are close to the yes/no phase
transition (Sleegers and Van den Berg, 2021).
3 EVOLUTIONARY HARDNESS
So until 2020 the case for the Hamiltonian was crys-
tal clear: like all NP-complete problems, it has a
solvability phase transition, in this (rare) case exactly
characterized by the Koml
´
os-Szemer
´
edi bound (or
KS-bound), and the hardest instances, which are sig-
nificantly harder than a given random instance, are lo-
cated very close to that bound for all major backtrack-
ing algorithms (Sleegers and Van den Berg, 2021).
But 21
st
century computing power was about to
throw a wrench in the machine, as Joeri Sleegers
was about to evolve Hamiltonian cycle problem in-
stances, making them as hard as possible using two
evolutionary algorithms. First, a fully stochastic
hillClimber was implemented; the algorithmic pro-
cess was as follows: a single mutation on the in-
cumbent hardest instance, which was retained if and
only if the mutant was harder or equally hard. Oth-
erwise, the mutation was reverted. Second, the
population-based plant propagation algorithm (PPA),
whose central idea is that fitter individuals produce
many offspring with few mutations whereas unfitter
individuals produce fewer offspring with high muta-
bility, thus alledgedly “[balancing the forces of ex-
ploration and exploitation]” (Vrielink and van den
Berg, 2019). Since its introduction by Abdellah Salhi
and Eric Fraga (Salhi and Fraga, 2011), the paradigm
has seen a number of applications (Sulaiman et al.,
2018)(Sleegers and van den Berg, 2020a)(Sleegers
and van den Berg, 2020b)(Fraga, 2019)(Rodman
et al., 2018), as well as some spinoffs (Sulaiman
et al., 2016)(Paauw and van den Berg, 2019; Dijkzeul
et al., 2022)(Selamo
˘
glu and Salhi, 2016)(Haddadi,
2020)(Geleijn et al., 2019). For the experiment, a
constant popSize = 10 was adopted, which produced
25 offspring every generation, which were distributed
and mutated as shown in table 1.
Table 1: The number and mutability of offspring produced
by PPA’s individuals are based on its fitness rank (1 =
fittest).
Rank 1 2 3 4 5 6 – 10
#offspring 6 5 4 3 2 1
#mutations 1 2 5 5 10 20
3
Source code is publicly available (Source, 2022).
ECTA 2022 - 14th International Conference on Evolutionary Computation Theory and Applications
108

Both evolutionary algorithms used three mutation
types with equal probability:
1. to insert an edge at a randomly chosen unoccu-
pied place in the graph,
2. to remove a randomly chosen existing edge from
the graph,
3. and to move an edge, which is effectively equal to
a remove mutation followed by an insert mutation
(on a different unoccupied place).
For the hillClimber runs, 20 randomly generated
graphs were evenly dispersed in terms of edge density,
ranging from 0 to
1
2
V ·(V −1) edges, corresponding to
edge densities ∈ {0%, 5%, 10%...95%}. For the PPA
runs, twenty initial populations with popSize = 10
were made along the same edge density intervals,
with all graphs in one population having the same
edge density. It should be noted that these densities
are fixed only upon initialization, as the evolution-
ary algorithms are free to insert and remove edges
from graphs at every step of a run. The rationale be-
hind this choice of edge densities is that earlier results
could have been biased from the initialization on the
Koml
´
os-Szemer
´
edi bound. This spread out approach
would cover a much wide area of the state space – at
least in terms of initial conditions. For the end results
however, it did not make much of a difference.
From these evenly distributed initial positions,
both algorithms ran 3000 function evaluations, corre-
sponding to 3000 generations for the stochastic hill-
Climber, but 120 generations of PPA. For the hardest
instance, both algorithms converged on the same in-
stance, a highly regular wall-and-clique-graph (Fig-
ure 1), not having a Hamiltonian cycle. For yes-
instances however (graphs which do have a Hamil-
tonian cycle) the hardest was in fact not a solitary
graph, but rather a constellation of 27 equihard non-
isomorphic graphs which were connected by one-
bit mutations: the Hamiltonian plateau (Figure 1)
(Sleegers and van den Berg, 2022). In this paper,
we will show that these evolutionarily found instances
are not only hard for Vacul’s algorithm, but possess a
more universal hardness.
4 EXPERIMENT & RESULTS
The hardest evolutionarily found instances (as seen
in Figure 1) are all 14-vertex graphs. The reason
that Sleegers & Van den Berg originially used such
instances, is that because the evolutionary algorithm
constantly pushes for hardness, measured through the
number of recursions for the most efficient known
backtracking algorithm, even a single function eval-
uation of the evolutionary algorithm can require
millions of recursions, which consumes incredible
amounts of computational power over the evolution-
ary trajectory, especially for population-based algo-
rithms.
For a fair comparison, we generated an ensemble
of random graph which also have V = 14 vertices.
The maximum number of edges that a V = 14 graph
instance can hold is
1
2
· 14 · 13 = 91, so for the ran-
dom ensemble, we generated 1000 graphs for each
E ∈ [1, 91], meaning we covered the entire edge den-
sity range with a set of 91,000 graphs. We will call
this ensemble Rand91K, and all graphs are publicly
available (Source, 2022). Then, we added the single
nonHam
0
graph and the 27 Ham
0
graphs, the hardest
no- and yes-instances as found by our evolutionary al-
gorithms. After that, each of these 91028 problem in-
stances was decided in six experiments, one for each
recursive algorithm, and the results can be found in
Figure 2.
Of the 91,000 instances in Rand91K, 61720 were
Hamiltonian, whereas 29280 were not. These num-
bers might seem counterintuitive, but one should re-
alize that the KS-bound for Hamiltonicity in a graph
of V vertices scales as
1
2
V ln(V ) +
1
2
V ln(ln(V )),
whereas possible number of edges scales as
1
2
V (V −
1). The combinatorial peak lies somewhat lower at
1
4
V (V − 1), but even for very modest numbers of
V , there are far more T RUE-instances than FALSE-
instances for the Hamiltonian cycle problem. For
V = 10, approximately 73% of all existible instances
are Hamiltonian; for V = 14, the percentage is al-
ready 93%
4
. It is paradoxical but true that for this NP-
complete decision problem, nearly every existable in-
stance is a yes-instance.
Nonetheless, NP-complete classification relies on
the guarantee of exactness; it follows that all 91,000
instances were decided upon by all six algorithms, the
results of which can be found in Table 2 in columns
2-5. Results for the evolutionarily found hard in-
stances are in the final two columns. In line with pre-
vious results, the three algorithms with pruning and
check routines (bottom three rows) outperform the
more basic algorithms. In addition, the evolutionar-
ily found Ham
0
and NonHam
0
are very hard for all
backtracking algorithms, even though the difference
is less acute for the basic algorithms, which are in-
efficient on a large part of the Rand91K set to begin
with.
For almost all algorithms, the nonHam
0
was
harder then every instance in the 91,000 random graph
4
Numbers in this study differ a bit because we forced
1,000 graphs for every possible edge degree.
Universally Hard Hamiltonian Cycle Problem Instances
109

Table 2: The hardest evolutionarily generated yes- and no-instances (Ham
0
and NonHam
0
) for Vacul’s algorithm are among
the hardest instances for all backtracking algorithms used in this study, even though the discrepancies are much more acute
for the three more advanced algorithms (values of µ and σ are rounded). Are Ham
0
and NonHam
0
universally hard instances
for the problem?
Algorithm median rec. µ recursions σ recursions max. recursions max. rec. Ham
0
rec. NonHam
0
Depth-first 25 13,841 392,694 78,238,081 994,086 104,845,861
Van Horn’s 14 11,755 375,779 78,378,266 2,594,148 104,845,861
Cetal’s 71 11,047 307,582 64,760,949 7,321,408 41,803,191
Martellos 14 13 86 11,483 554,760 21,978,181
Rubin’s 14 11 14 2,528 75,894 3,091,141
Vacul’s 14 10 8 967 109,632 3,091,141
ensemble. For Vacul’s, Martello’s and Rubin’s, it was
3197 times, 1914 times and 1223 times harder than
the hardest graph in the ensemble, which was non-
Hamiltonian in Vacul’s and Martello’s, but Hamilto-
nian in Rubin’s case, surprisingly enough. A quick-
and-dirty explanation might be that nonHam
0
nar-
rowly ‘dodges’ the pruning and test procedures that
these algorithms have, leaving it up to a high number
of recursions.
For the non-pruning non-check algorithms, results
were a lot less conclusive: in both plain depth-first
and Van Horn’s, nonHam
0
was ‘only’ 1.34 times
harder than the hardest (non-Hamiltonian) instance in
the ensemble. For Cetal’s, it wasn’t even the hard-
est, but 0.65 times the hardness of the hardest (non-
Hamiltonian) instance in the ensemble, and 1.43 times
harder than the second hardest (non-Hamiltonian) in-
stance in the ensemble. This appears largely a testa-
ment of the efficiency of the algorithms with checks
and pruning, or, as Steven Skiena once said: “Clever
pruning can make short work of surprisingly hard
problems” (Skiena, 1998).
For the 27 graphs of Ham
0
set, the results were
far less resounding, but still a clear distinction could
again be noticed for the three algorithms with checks
and pruning. For the highly efficient algorithm by
Vacul, the entire Ham
0
set was 113 times harder
than the hardest instance from the Rand91K-set. For
Rubin’s algorithm, the 27 instances of Ham
0
set
no longer form a plateau. They are nonetheless a
hard set, requiring between 75,894 and 37,824 recur-
sions, still 15 times more than the hardest Rand91K-
instance at 2528 recursions. For Martello’s, the 27
graphs of Ham
0
do constitute a plateau, whose in-
stances are 48 times harder than the hardest graph
from Rand91K.
For the non-pruning non-check algorithms, the
Ham
0
was still a hard set of instances, but results
were a lot messier. In Van Horn’s, no less than 60
instances (58 non-Hamiltonian and 2 Hamiltonian)
from the Rand91K-set were harder than Ham
0
. For
Cetal’s algorithm, the 81 hardest instances contained
the entire Ham
0
-set, the nonHam
0
and another 53
Rand91K-instances. For depth-first, the Ham
0
-set,
the nonHam
0
-instance and 421 Rand91K-instances
made up the 449 hardest instances. The quick and
dirty explanation is that this algorithm underperforms
on the Ham
0
-set, but underperforms even worse on
some of the Rand91K-instances. Nonetheless the dif-
ference with the nonHam
0
, which is the almost ex-
clusively hardest instance for all studied algorithms,
is stark.
5 CONCLUSIONS
The current results present some evidence that the
hardest Hamiltonian cycle instances for one exact
backtracking algorithm, are hard(est) for other exact
backtracking algorithms too. The contrast is greatest
in the most efficient algorithms, but that has more to
do with the inefficiency of the other backtracking al-
gorithms. Still, we must not close our eyes to thenu-
ances in the narrative: for some inefficient algorithms,
still harder instances exist, be it very few. Nonethe-
less, nonHam
0
and the Ham
0
-set can be considered
almost universally hard for backtracking algorithms.
The fact that these hardest instances do not appear
in large random ensembles such as the Rand91K-set
also begs the question what makes the Hamiltonian
cycle problem NP-complete. Is it possible that effi-
cient backtrackers solve all but a very small number
of instances, which can be listed in a table? And if so,
how does the table scale under increasing V ? Con-
sidering their structural regularity, they might even
have a short algorithmical description. We should fur-
ther refine these instances. Although somewhat out
of fashion, it is clear that the class of recursive back-
tracking algorithms has not yet revealed all of its se-
crets.
REFERENCES
Bellman, R. (1962). Dynamic programming treatment of
the travelling salesman problem. Journal of the ACM
(JACM), 9(1):61–63.
ECTA 2022 - 14th International Conference on Evolutionary Computation Theory and Applications
110

Braam, F. and van den Berg, D. (2022). Which rectangle
sets have perfect packings? Operations Research Per-
spectives, page 100211.
Cheeseman, P. C., Kanefsky, B., and Taylor, W. M. (1991).
Where the really hard problems are. In IJCAI, vol-
ume 91, pages 331–340.
Dijkzeul, D., Brouwer, N., Pijning, I., Koppenhol, L., and
Van den Berg, D. (2022). Painting with evolutionary
algorithms. In International Conference on Compu-
tational Intelligence in Music, Sound, Art and Design
(Part of EvoStar), pages 52–67. Springer.
Fraga, E. S. (2019). An example of multi-objective opti-
mization for dynamic processes. Chemical Engineer-
ing Transactions, 74:601–606.
Garey, M. R. and Johnson, D. S. (2002). Computers and
intractability, volume 29. wh freeman New York.
Garey, M. R., Johnson, D. S., and Tarjan, R. E. (1976). The
planar hamiltonian circuit problem is np-complete.
SIAM Journal on Computing, 5(4):704–714.
Geleijn, R., van der Meer, M., van der Post, Q., and van den
Berg, D. (2019). The plant propagation algorithm on
timetables: First results. EVO* 2019, page 2.
Gent, I. P. and Walsh, T. (1996). The tsp phase transition.
Artificial Intelligence, 88(1-2):349–358.
Haddadi, S. (2020). Plant propagation algorithm for nurse
rostering. International Journal of Innovative Com-
puting and Applications, 11(4):204–215.
Hayes, B. (1997). Computing science: Can’t get no satis-
faction. American scientist, 85(2):108–112.
Held, M. and Karp, R. M. (1962). A dynamic program-
ming approach to sequencing problems. Journal of
the Society for Industrial and Applied Mathematics,
10(1):196–210.
Iori, M., De Lima, V., Martello, S., and M., M. (2021a).
2dpacklib: a two-dimensional cutting and packing li-
brary (in press). Optimization Letters.
Iori, M., de Lima, V. L., Martello, S., Miyazawa, F. K., and
Monaci, M. (2021b). Exact solution techniques for
two-dimensional cutting and packing. European Jour-
nal of Operational Research, 289(2):399–415.
Iori, M., de Lima, V. L., Martello, S., and Monaci, M.
(2021c). 2dpacklib.
Karp, R. M. (1972). Reducibility among combinatorial
problems. In Complexity of computer computations,
pages 85–103. Springer.
Karp, R. M. (2008). Reducibility among combinatorial
problems. 50 Years of Integer Programming 1958–
2008, page 219.
Koml
´
os, J. and Szemer
´
edi, E. (1983). Limit distribution for
the existence of hamiltonian cycles in a random graph.
Discrete Mathematics, 43(1):55–63.
Larrabee, T. and Tsuji, Y. (1992). Evidence for a satisfia-
bility threshold for random 3CNF formulas. Citeseer.
Martello, S. (1983). Algorithm 595: An enumerative al-
gorithm for finding Hamiltonian circuits in a directed
graph. ACM Transactions on Mathematical Software
(TOMS), 9(1):131–138.
Paauw, M. and van den Berg, D. (2019). Paintings,
polygons and plant propagation. In International
Conference on Computational Intelligence in Music,
Sound, Art and Design (Part of EvoStar), pages 84–
97. Springer.
Rodman, A. D., Fraga, E. S., and Gerogiorgis, D. (2018).
On the application of a nature-inspired stochastic
evolutionary algorithm to constrained multi-objective
beer fermentation optimisation. Computers & Chemi-
cal Engineering, 108:448–459.
Rubin, F. (1974). A search procedure for hamilton paths and
circuits. Journal of the ACM (JACM), 21(4):576–580.
Salhi, A. and Fraga, E. S. (2011). Nature-inspired optimi-
sation approaches and the new plant propagation algo-
rithm.
Selamo
˘
glu, B.
˙
I. and Salhi, A. (2016). The plant propaga-
tion algorithm for discrete optimisation: The case of
the travelling salesman problem. In Nature-inspired
computation in engineering, pages 43–61. Springer.
Skiena, S. S. (1998). The algorithm design manual. page
247.
Sleegers, J., Olij, R., van Horn, G., and van den Berg, D.
(2020). Where the really hard problems aren’t. Oper-
ations Research Perspectives, 7:100160.
Sleegers, J. and van den Berg, D. (2020a). Looking for
the hardest hamiltonian cycle problem instances. In
IJCCI, pages 40–48.
Sleegers, J. and van den Berg, D. (2020b). Plant propaga-
tion & hard hamiltonian graphs. Evo* 2020, page 10.
Sleegers, J. and Van den Berg, D. (2021). Backtracking
(the) algorithms on the hamiltonian cycle problem. In-
ternational Journal On Advances in Intelligent Sys-
tems, 14:1–13.
Sleegers, J. and van den Berg, D. (2022). The hardest hamil-
tonian cycle problem instances: the plateau of yes and
the cliff of no. SCSC. (In press.).
Source (2022). Publicly accessible source code, in-
stances & results. https://github.com/Joeri1324/
Universally-Hard-Hamiltonian-Cycle-Problem-Instances.
Last accessed june 18
th
, 2022.
Sulaiman, M., Salhi, A., Fraga, E. S., Mashwani, W. K., and
Rashidi, M. M. (2016). A novel plant propagation al-
gorithm: modifications and implementation. Science
International, 28(1):201–209.
Sulaiman, M., Salhi, A., Khan, A., Muhammad, S., and
Khan, W. (2018). On the theoretical analysis of the
plant propagation algorithms. Mathematical Problems
in Engineering, 2018.
Van Den Berg, D. and Adriaans, P. (2021). Subset sum
and the distribution of information. In Proceedings of
the 13th International Joint Conference on Computa-
tional Intelligence, pages 135–141.
van den Berg, D., Braam, F., Moes, M., Suilen, E., Bhulai,
S., et al. (2016). Almost squares in almost squares:
solving the final instance.
van Horn, G., Olij, R., Sleegers, J., and van den Berg, D.
(2018). A predictive data analytic for the hardness of
hamiltonian cycle problem instances. DATA ANALYT-
ICS 2018, page 101.
Vandegriend, B. and Culberson, J. (1998). The gn, m
phase transition is not hard for the Hamiltonian cycle
problem. Journal of Artificial Intelligence Research,
9:219–245.
Vrielink, W. and van den Berg, D. (2019). Fireworks algo-
rithm versus plant propagation algorithm.
Universally Hard Hamiltonian Cycle Problem Instances
111
