
Towards View-invariant Vehicle Speed Detection from Driving Simulator
Images
Antonio Hern
´
andez Mart
´
ınez
1 a
, David Fern
´
andez Llorca
1,2 b
and Iv
´
an Garc
´
ıa Daza
1 c
1
Computer Engineering Department, University of Alcal
´
a, Alcal
´
a de Henares, Spain
2
European Commission, Joint Research Centre (JRC), Seville, Spain
Keywords:
Vehicle Speed Detection, Driving Simulator, CARLA, View-invariant, Multi-view, Speed Camera.
Abstract:
The use of cameras for vehicle speed measurement is much more cost effective compared to other technologies
such as inductive loops, radar or laser. However, accurate speed measurement remains a challenge due to
the inherent limitations of cameras to provide accurate range estimates. In addition, classical vision-based
methods are very sensitive to extrinsic calibration between the camera and the road. In this context, the use of
data-driven approaches appears as an interesting alternative. However, data collection requires a complex and
costly setup to record videos under real traffic conditions from the camera synchronized with a high-precision
speed sensor to generate the ground truth speed values. It has recently been demonstrated (Martinez et al.,
2021) that the use of driving simulators (e.g., CARLA) can serve as a robust alternative for generating large
synthetic datasets to enable the application of deep learning techniques for vehicle speed estimation for a
single camera. In this paper, we study the same problem using multiple cameras in different virtual locations
and with different extrinsic parameters. We address the question of whether complex 3D-CNN architectures
are capable of implicitly learning view-invariant speeds using a single model, or whether view-specific models
are more appropriate. The results are very promising as they show that a single model with data from multiple
views reports even better accuracy than camera-specific models, paving the way towards a view-invariant
vehicle speed measurement system.
1 INTRODUCTION
A clear causal relationship between excess speed and
the risk of death and serious injury is well-established.
Thus, speed enforcement through automatic speed
measurement, vehicle identification and subsequent
sanctioning is a fundamental road safety measure that
leads directly to the reduction of accidents (ERSO,
EC, 2018). In fact, in the vicinity of speed cameras,
the reduction of speeding vehicles and collisions can
reach 35% and 25% respectively (Wilson et al., 2010).
In addition, it has been shown that the higher the in-
tensity of the enforcement, the greater the reduction
in accidents (Elvik, 2011).
Most common speed measurement technologies
include high-accuracy, high-cost range sensors such
as radar and laser, as well as intrusive sensors such
as magnetic inductive loop detectors. The use of
a
https://orcid.org/0000-0001-5722-1531
b
https://orcid.org/0000-0003-2433-7110
c
https://orcid.org/0000-0001-8940-6434
cameras has rarely been proposed for speed detec-
tion due to the demanding requirements for accuracy
and robustness, and the intrinsic limitations of cam-
eras to accurately measure range. They often play
a secondary role in detecting license plates or cap-
turing human-understandable information from the
scene, allowing visual identification of vehicles, even
drivers, and serving as evidence when the speed limit
is violated. Recent advances in computer vision, how-
ever, have led to a significant increase in the number
of proposals that use vision as the only mechanism
for measuring vehicle speed (Fern
´
andez-Llorca et al.,
2021). Cameras are a very cost-effective alternative
that allows the integrated implementation of speed
detection along with other functionalities such as li-
cense plate detection, automatic vehicle identification
or even occupant detection.
188
Martínez, A., Llorca, D. and Daza, I.
Towards View-invariant Vehicle Speed Detection from Driving Simulator Images.
DOI: 10.5220/0011380000003335
In Proceedings of the 14th International Joint Conference on Knowledge Discovery, Knowledge Engineering and Knowledge Management (IC3K 2022) - Volume 1: KDIR, pages 188-195
ISBN: 978-989-758-614-9; ISSN: 2184-3228
Copyright © 2024 by Paper published under CC license (CC BY-NC-ND 4.0)
Camera Settings
Environment
Vehicle
Camera Pose 1
Camera Pose 2
Camera Pose N
3D CNN 1
Camera Pose 1
3D CNN 2
3D CNN N
3D CNN Holistic
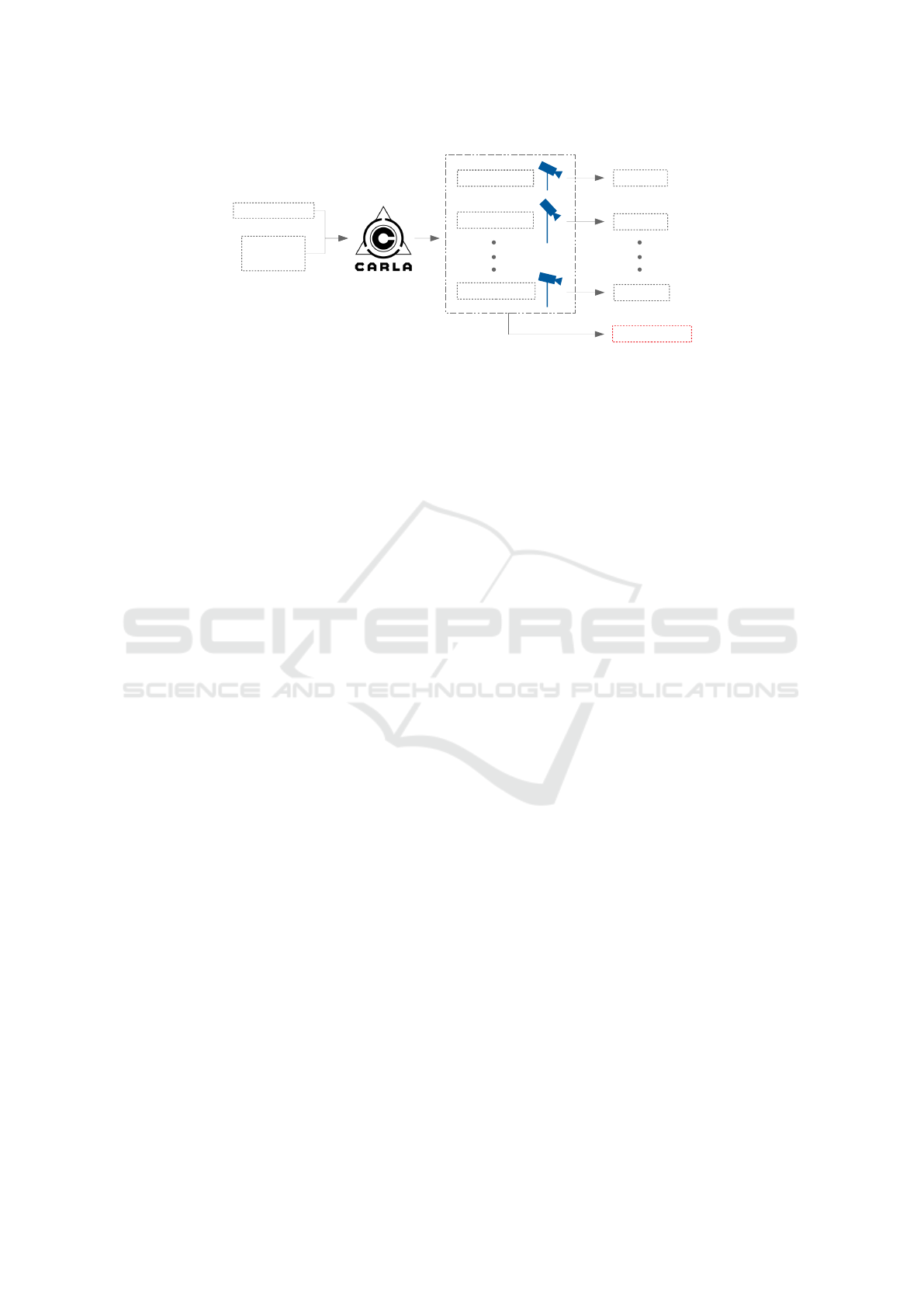
Figure 1: Overview of the presented approach. From left to right: control parameters, simulator, camera-specific datasets,
view-specific models, and view invariant (holistic) model.
Still, vision-based speed measurement is a chal-
lenging problem due to the discrete nature of video
sensors. In addition, classical vision-based methods
are very sensitive to extrinsic calibration between the
camera and the road. In this context, the use of data-
driven approaches appears as an interesting alterna-
tive but real data collection requires a complex setup
(Llorca et al., 2016). It has recently been proved that
the use of driving simulators (e.g., CARLA) can serve
as a robust alternative for generating large synthetic
datasets to enable the application of deep learning
techniques for vehicle speed estimation from a single
camera (Martinez et al., 2021) or from multiple views
(Barros and Oliveira, 2021).
In this paper, we extend our previous work (Mar-
tinez et al., 2021) by addressing the question of
whether complex end-to-end 3D-CNN architectures
(i.e., regression problem, from sequences to speeds)
are capable of implicitly learning view-invariant
speeds using a single holistic model, or whether view-
specific models are more appropriate. We extend our
synthetic dataset based on CARLA simulator (Doso-
vitskiy et al., 2017) using six different virtual cam-
eras with variations in height and pitch angle. Then
six view-specific models are developed and compared
with one single multi-view model trained with se-
quences from all the cameras. An overall view of the
proposed approach is depicted in Fig. 1. The results
presented are very promising as they suggest that the
model is capable not only of absorbing the variability
of multiple views, but also of benefiting from it and
from the increased availability of data, which opens
the door to future view-invariant systems.
2 RELATED WORK
As the survey presented in (Fern
´
andez-Llorca et al.,
2021) concludes, although we can find hundreds of
works focused on vision-based vehicle speed detec-
tion, the available solutions are not sufficiently ma-
ture. A considerable number of papers present sub-
optimal camera pose and settings resulting in very
high meter-to-pixel ratios that are unlikely to provide
accurate estimates of depth and speed. Performance
and robustness in difficult lighting and weather condi-
tions are often neglected. The sensitivity of each ap-
proach to pose and camera settings is not sufficiently
addressed.
In addition, the number of data-driven approaches,
well consolidated in other areas of computer vision, is
still very limited for speed regression. This may also
be due to the lack of well-established datasets to train
and compare the performance of different methods. In
this section, we focus on recent learning-based meth-
ods for vision-based vehicle speed detection from the
infrastructure, including available datasets. We refer
to (Fern
´
andez-Llorca et al., 2021) for a more com-
plete overview of the state-of-the-art.
2.1 Learning-based Approaches
Regarding the estimation of vehicle speed using data-
driven methods, only a few papers are found in the
available literature. In (Dong et al., 2019), average
traffic speed estimation is addressed as a video action
recognition problem using 3D CNNs. They concate-
nate RGB and optical flow images and found that op-
tical flow was more useful. They emphasize that the
main limitation is overfitting due to the lack of avail-
able data. In (Madhan et al., 2020) a Modular Neu-
ral Network (MNN) architecture is presented to per-
form joint vehicle type classification and speed detec-
tion. These two approaches are more suitable for av-
erage traffic speed detection, since the input data cor-
respond to multiple lanes and vehicles. Some kind of
mechanism is needed to generate regions of interests
with sufficient spatio-temporal information (Biparva
et al., 2022) to distinguish different speeds for differ-
ent types of vehicles and scenarios. This issue can
Towards View-invariant Vehicle Speed Detection from Driving Simulator Images
189

be mitigated by using a camera setting with a lower
meter-pixel ratio focusing on a single lane.
Recent works have proposed the use of LSTM-
type recurrent architectures (Parimi and Jiang, 2021),
(Martinez et al., 2021), but as demonstrated in (Mar-
tinez et al., 2021) with synthetic data, they seem
to perform worse than other non-recurrent methods
such as 3D CNNs. In (Revaud and Humenberger,
2021) camera calibration, scene geometry and traf-
fic speed detection are performed using a transformer
network in a learning process from synthetic training
data, considering that cars have similar and known 3D
shapes with normalized dimensions. In (Rodr
´
ıguez-
Rangel et al., 2022), after vehicle detection and track-
ing using YOLOv3 and Kalman filter, respectively,
a linear regression model is used to estimate the ve-
hicle speed. Other statistical and machine learning-
based methods are also compared. Vehicle detection
and tracking is performed in (Barros and Oliveira,
2021) using Faster R-CNN and DeepSORT, respec-
tively. Next, dense optical flow is extracted using
FlowNet2, and finally, a modified VGG-16 deep net-
work is used to perform speed regression.
2.2 Datasets for Speed Detection
So far, only two datasets with real sequences and
ground truth values are publicly available. First, the
BrnoCompSpeed dataset (Sochor et al., 2017), which
contains 21 sequences (∼1 hour per sequence) with
1920 × 1080 pixels resolution images at 50 fps in
highway scenarios. The speed ground truth is ob-
tained using a laser-based light barrier system. Sec-
ond, the UTFPR dataset (Luvizon et al., 2017), which
includes 5 hours of sequences with 1920 × 1080 pix-
els resolution images at 30 fps in an urban scenario.
The ground truth speeds are obtained using inductive
loop detectors.
Therefore, as described above, the use of synthetic
datasets is becoming increasingly prevalent for this
problem. For example, in (Lee et al., 2019) a CNN
model to estimate the average speed of traffic from
top-view images is trained using synthesized images,
which are generated using a cycle-consistent adver-
sarial network (Cycle-GAN). Synthetic scenes with
a resolution of 1024 × 768 pixels covering multiple
lanes with vehicles randomly placed on the road are
used in (Revaud and Humenberger, 2021) to train and
test the method used to jointly deal with camera cal-
ibration and speed detection. In our previous work
(Martinez et al., 2021), a publicly available synthetic
dataset was generated using CARLA simulator, us-
ing one fixed camera at 80 FPS with Full HD format
(1920 ×1080), with variability corresponding to mul-
tiple speeds, different vehicle types and colors, and
lighting and weather conditions. A similar approach
was presented in (Barros and Oliveira, 2021) includ-
ing multiple cameras and generating more than 12K
instances of vehicles speeds. Preliminary, it is ob-
served that multi-camera variability does not nega-
tively affect the results. However, this effect has not
been sufficiently studied.
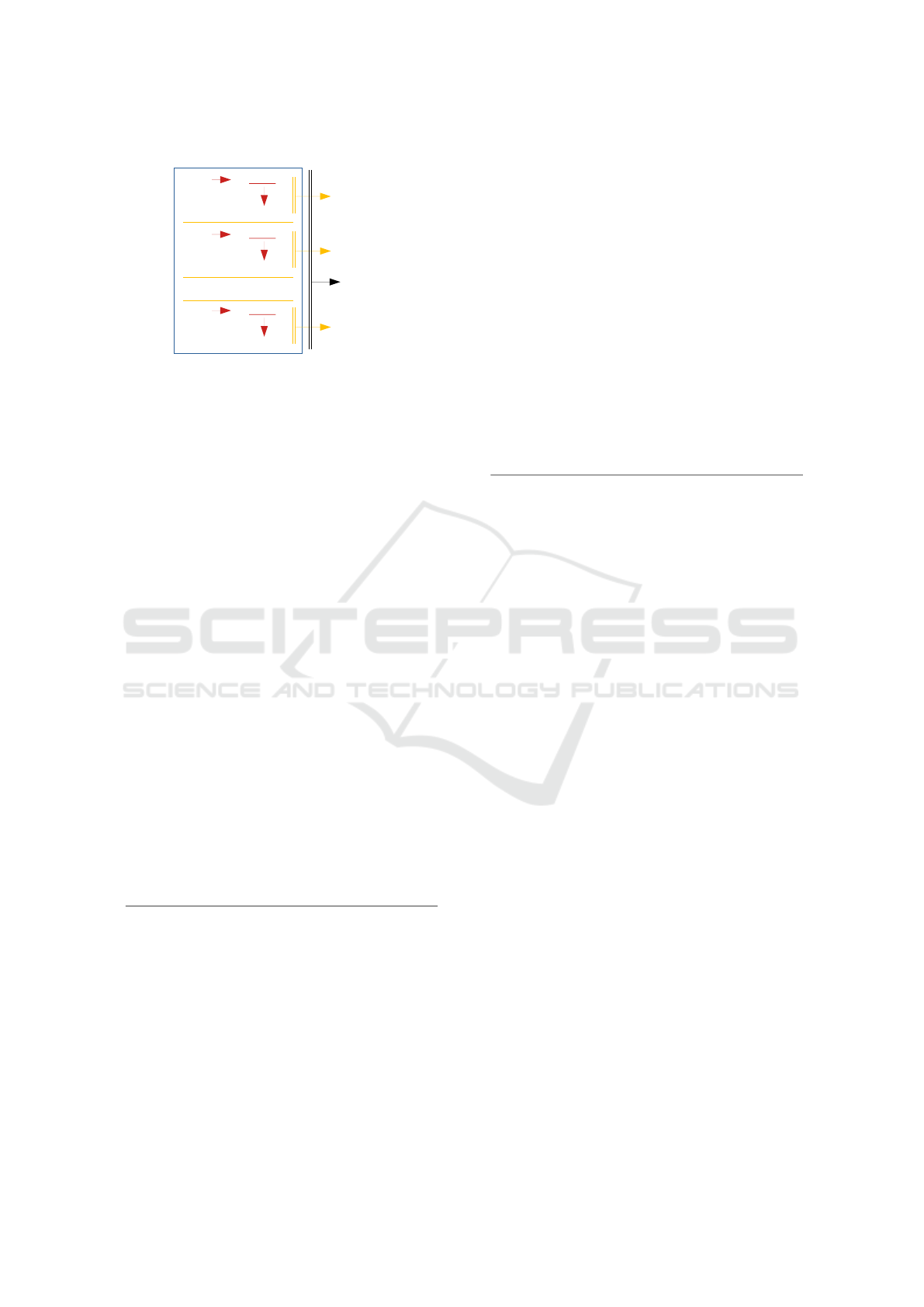
Figure 2: Overview of the different datasets. Upper row 4m
camera height. Lower row 3m camera height. The columns
show an 45º, 50º and 60º camera pitch from left to right.
3 METHOD
This section describes the methodology used for the
construction of the new dataset, based on the one
shown in the previous work (Martinez et al., 2021),
including new camera poses, and increasing the com-
plexity of the speed detection problem.
3.1 Multi-view Synthetic Dataset
Starting from the single-view synthetic dataset gen-
erated in the our previous work (Martinez et al.,
2021) using the CARLA simulator (Dosovitskiy et al.,
2017), the extrinsic parameters of the camera are
modified, specifically the pitch angle and the height
with respect to the road, leaving the rest of the extrin-
sic and intrinsic parameters fixed.
As a first step to increase variability in a controlled
manner and to be able to carry out a comprehensive
analysis of results, we included six different poses,
using two different camera heights and three different
pitch angles (extrinsic parameters): 3m45 (the origi-
nal one), 3m50, 3m60, 4m45, 4m50 and 4m60. On
the one hand, a holistic model is generated, trained,
validated and tested using all the sequences in the
dataset. On the other hand, pose-specific models are
trained, validated and tested only with the sequences
corresponding to each pose. Fig. 3 depicts how the
dataset is used.
For the selected camera heights (3m and 4m) the
three pitch angels have been defined taking into ac-
count the road section captured by the camera field
of view. For pitch angles greater than 60
◦
the road
section is too short, while for angles less than 45
◦
KDIR 2022 - 14th International Conference on Knowledge Discovery and Information Retrieval
190
Multi-pose camera dataset
3m45 *.json
images
3m50 *.json
images
4m60 *.json
images
.
.
.
3m45 model
3m50 model
4m60 model
Holistic
model
Figure 3: Schematic view of the dataset processing method.
the section is too long (for more details on the opti-
mal distances for speed detection see (Llorca et al.,
2016)). With these configurations, road sections of
between 4 and 10 meters in length were obtained.
Therefore, six camera poses were used, generating
610 sequences per pose (total number of sequences
is 3660). Each sequence with the associated vehi-
cle has a random speed between 30 and 100 km/h.
The sequence has an individual number of images de-
pending on the speed. Thus, the number of images
recorded in the dataset is approximately 427k. An ex-
ample image is shown in Fig. 2 for each camera pose.
Each simulation carried out to obtain the image se-
quences generates a json file. The json files record the
frame number, the brand and model of the simulated
vehicle, as well as its speed and ID, among other keys.
With the json file, and using the ID, the labelling can
be divided into sequences, each with the number of
frames generated depending on the vehicle speed.
To generate the labelling of the holistic model, the
json files of each of the simulations are combined,
adding for each sequence a new key indicating the
dataset from which the sequence comes. In this way,
each model can be evaluated individually, and cross
tests can also be performed, as in the case of the holis-
tic model, which has been used to test each of the
datasets.
Listing 1: json file labeling example.
1 {" elapsed seconds " :2.0 5 ,
2 " de l t a _ s ec o n d s " : 0 . 0 1 2 5 ,
3 " p l a t f o r m _ ti m e s ta m p " : 5 9 7 5 4 4 . 3 7 ,
4 " x " : 3 9 2 . 1 9 ,
5 " y " : 3 0 4 . 0 ,
6 " velocity " : 2 4 . 0 4 2 ,
7 " player_ i d " : 2 5 9 ,
8 " pl a y e r _ t y p e " : " vehicle .
car l a m o t o r s . c a r l a c o l a " ,
9 " attr i b u t e s " : {
10 " n u m b e r _ o f _ w he e l s " : " 4 " ,
11 " s t i c k y _ co n t r o l " : " t r ue " ,
12 " o b je c t _ t y p e " : "" ,
13 " c olor " : " 2 5 5 , 6 8 , 0 " ,
14 " r o l e _ name " : " hero "
15 },
16 " w eat h e r _ t y pe " : "
We a t h e r P a r a m e t e r s (
clou d i n e s s = 3 0 . 0 ,
clou d i n e s s = 3 0 . 0 ,
pr e c i p i t a t i o n = 4 0 . 0 ,
pr e c i p i t a t i o n _ d e p o s i t s =4 0 .
0 , wi n d _ i n t e n s i t y = 3 0 . 0 ,
su n _ a z i m u t h _ a n g l e = 2 5 0 . 0 ,
su n _ a l t i t u d e _ a n g l e = 2 0 . 0 ,
fog _ d e n s i t y = 1 5 . 0 ,
fog _ d i s t a nc e = 5 0 . 0 ,
fog _ f a l l o f f = 0 . 9 , wetness = 8
0 . 0 ) "
17 }
Listing 1 shows one of the frames labeled in the
json file, where the aforementioned keys can be ob-
served. In addition, the time elapsed between two
consecutive images, the X and Y positions of the ve-
hicle, and the vehicle’s speed can be verified alterna-
tively with this data.
3.2 3D-CNN model
On this occasion, although the VGG16-GRU net-
work used previously (Martinez et al., 2021) obtained
highly successful results, it was decided to continue
with the use of the 3D-CNN network, since it showed
better performance.
Hence, in order to compare the different results
obtained in each training performed, it has been de-
cided not to modify any of the parameters or hyper-
parameters of the neural network.
First of all, it has been decided to perform an in-
dividual training for each of the mentioned datasets,
in this way it has been possible to check which of the
configurations used is better for the proposed system.
After this, it has been decided to perform a train-
ing on the complete dataset, with all the sequences of
each of the individual datasets, in order to check the
generalization capacity of the network.
Finally, this model trained with the complete set
of images has been tested with each of the test sets
of the different individual datasets. In order to per-
form this type of tests, it has been guaranteed that the
holistic model has not seen any of the test images of
the individual models in its training.
Towards View-invariant Vehicle Speed Detection from Driving Simulator Images
191

Figure 4: Left: theoretical speed estimation error with respect to the distance of the measurement section. From (Llorca et al.,
2016). Right: obtained results of the speed estimation error with respect to the distance of the measurement section.
3.3 Training Parameters
In this case, the trained network has not been modified
in terms of its parameters with respect to the previous
work. This is due to the fact that in this way it is pos-
sible to compare in a more correct way the different
training with different datasets.
These parameters have been the following: a
learning rate of 3 × 10
−4
, a batch size of 5, Adam
has been used as the optimizer, and the MSE has
been used as the loss function. The network has been
trained using the early-stopping technique, with a pa-
tience of 7, and the velocity data has been normalized
between -1 and 1. In this way, the new training can be
perfectly compared with the one performed in (Mar-
tinez et al., 2021).
The complete dataset of 3660 sequences has been
divided into 2196 training sequences (60%), 732
validation sequences (20%) and 732 test sequences
(20%). Furthermore, it has been guaranteed that the
training images correspond to the training images of
each of the 6 individual datasets, as well as the valida-
tion and test images, preventing the network with the
holistic dataset from seeing test images from any of
the individual datasets during training when obtain-
ing crossed results.
4 EXPERIMENTAL EVALUATION
The results obtained from the different datasets are
generally very satisfactory. Table 1 shows the aver-
age error obtained in the test set for the individual an
holistic datasets.
In the same way, it has been decided to use the
holistic model trained with the total set of 3660 se-
quences, to test individually on each of the individual
sets, obtaining the results shown in Table 1. To per-
form this it is important to remember that the images
entered from each dataset belong to its own test set,
Table 1: Error by model type.
Dataset Error [m/s]
Individual Mod. Holistic Mod.
Only 3m 45º 0.36 0.31
Only 3m 50º 0.46 0.45
Only 3m 60º 0.54 0.47
Only 4m 45º 0.54 0.29
Only 4m 50º 0.28 0.32
Only 4m 60º 0.47 0.35
All dataset - 0.35
so the holistic network has never seen those images.
As can be seen, by using the holistic model, the
performance of the network has been improved in
almost all cases. This is explained by the fact that
this model has been trained using six times more se-
quences, and therefore has had more data to improve
its performance. From these extra sequences that go
into the training model, it can be deduced that with
small variations the network is able to learn and gen-
eralise, avoiding in certain cases the use of a pre-
trained model for each camera configuration.
In addition, it is possible to observe a behaviour
that would be expected in the evolution of the error
as the ”mini-stretch” of road to be studied increases.
The speed detection error reaches a minimum and, if
we continue to reduce the stretch of road to be studied,
the error increases again significantly, as explained in
the work (Llorca et al., 2016). This can be seen in
Fig. 4, where a minimum error can be observed with
stretches of around 7 metres length.
As can be seen in the figure 5, in the case of the
dataset with a camera located at a height of 3m and
45
◦
pitch, the results of the holistic model slightly im-
prove or equal the results obtained with the individual
model of 3m and 45
◦
. This can be explained by the
fact that this configuration is close to a stretch length
captured by the camera of about 7m distance, which,
as can be seen in the Fig. 4, is close to the point
of minimum error, so the margin of improvement for
KDIR 2022 - 14th International Conference on Knowledge Discovery and Information Retrieval
192
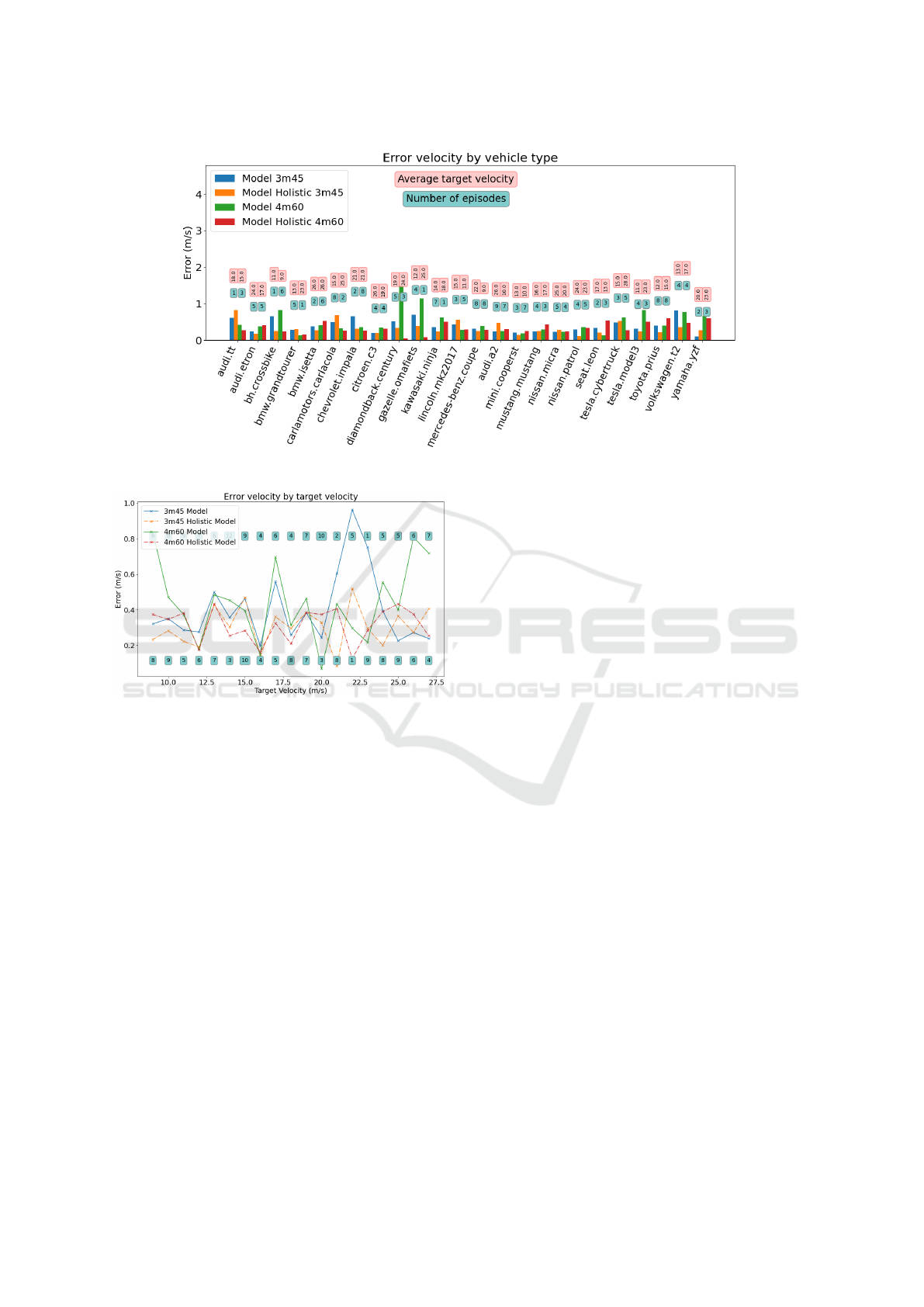
Figure 5: Error by Car Type. 3m 45º - 4m 60º.
Figure 6: Error by Target Speed. 3m 45º - 4m 60º.
this configuration would be very small. Likewise, the
graph shows that the vehicles that show an improve-
ment in error are precisely those in which bicycles
have been simulated, vehicles whose behaviour was
more difficult to predict by the individual model, and
therefore, with a greater possibility of error reduction.
Similarly, for the configuration of the camera at a
height of 4m and a pitch of 60
◦
, there is a considerable
improvement in most cases, as this model had worse
results when using its own model. Moreover, this can
also be seen in Table 1, where we can see that when
testing the dataset with the model that only knows the
own images, the average error is 0.46m/s, while when
using the holistic model, this error has been reduced
to 0.33m/s.
On the other hand, in Figs. 5 and 6, it can also
be seen that while the 3m-45º dataset shows little im-
provement when using the holistic model, the 4m-
60º dataset does improve the error considerably, es-
pecially at high speeds.
In Figs. 7 and 8 the same behaviour can be ob-
served again. The holistic model improves in almost
all cases the individual model, and this can be ex-
plained in the same way as in the previous case, since
for both configurations of 4m 45º and 4m 60º they
record a lane stretch of approximately 9m and 5m re-
spectively, which is far from the minimum error zone.
Finally, recordings were made in a real environ-
ment at speeds of 30km/h, 50km/s and 70 km/h, us-
ing as ground truth the cruise control of a personal
vehicle and a LiDAR system positioned perpendicu-
lar to the plane of the lane. Using the holistic model
trained in simulation, individual errors were obtained
for each of the speeds of 4.12 m/s, 1.48 m/s and 0.93
m/s respectively.
These results can be considered satisfactory be-
cause it is a first preliminary test, and the recordings
still have errors to correct, such as shutter and frame
rate, to match the images captured in simulation.
An example of a vehicle driving at 70km/h is
shown in the Fig. 9, where one of the problems iden-
tified when testing the recording, such as blur, can
be observed. The images taken have a resolution of
1920x1208 and have been recorded at 20 fps. To carry
out these tests, the camera was placed on a road with
two lanes in each direction of travel, at a height of 3.5
metres and centred on the lane to be recorded. At the
time of recording, the day was cloudy with no rain.
5 CONCLUSIONS AND FUTURE
WORKS
We can prove that a holistic model, which is trained
with a wide set of camera positions, can work for all
Towards View-invariant Vehicle Speed Detection from Driving Simulator Images
193
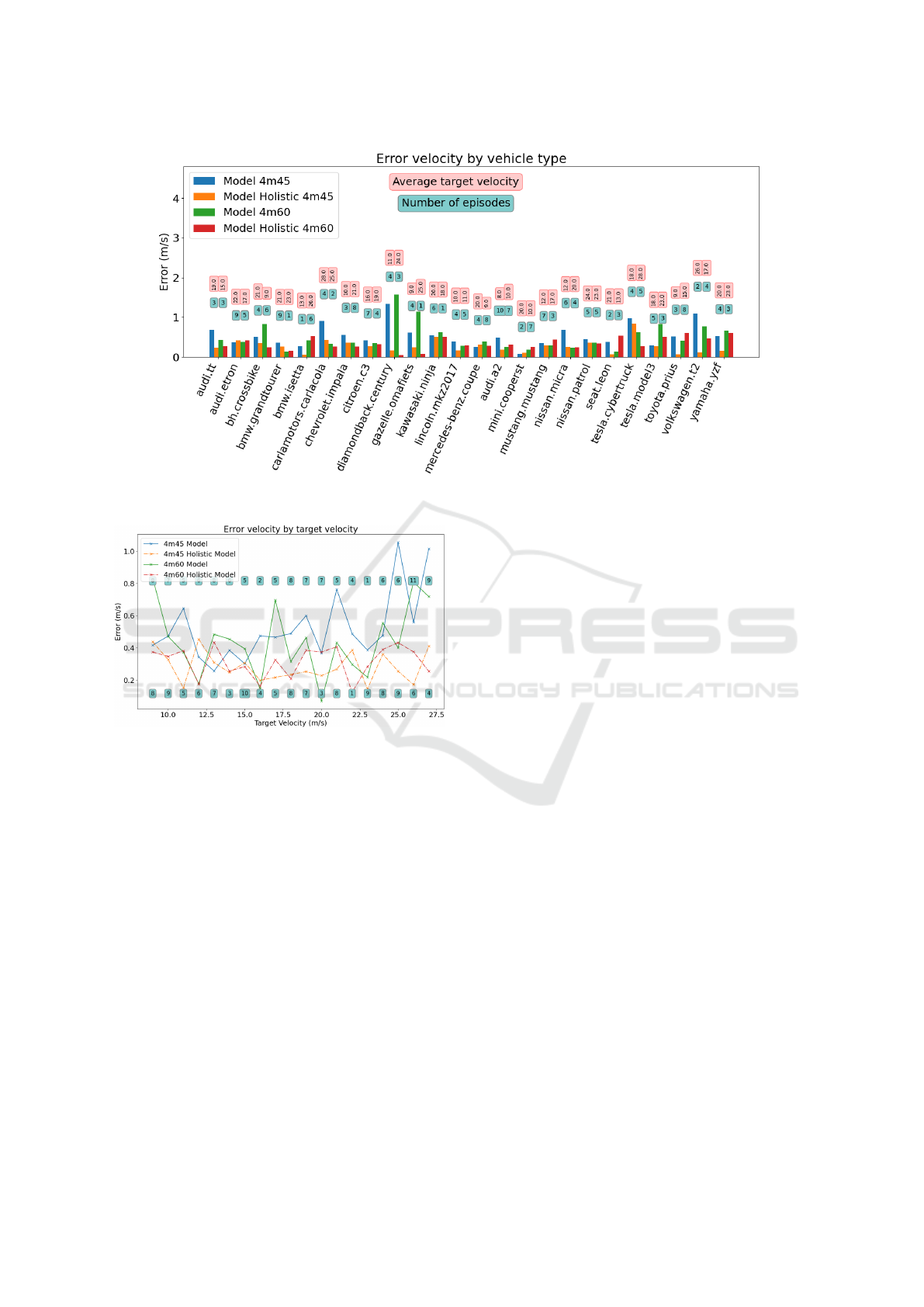
Figure 7: Error by Car Type. 4m 45º - 4m 60º.
Figure 8: Error by Target Speed. 4m 45º - 4m 60º.
of them, without the need to train a specific model for
each of the positions. Moreover, as has been shown
with real environment recordings, this model, which
has never seen this kind of images before, is able to
perform correctly.
These results indicate that it is possible to train a
model with an even larger set of camera positions, and
use it as a generic model for new and unknown posi-
tions for the network, obtaining sufficiently accurate
results.
The results obtained indicate that, if a model were
trained with a sufficiently large dataset, it could be ca-
pable of detecting the speed at which a vehicle is trav-
elling with greater accuracy than current radar-type
systems. Furthermore, it has also been shown that this
is also valid for other types of vehicles such as motor-
bikes, since a considerable improvement in error has
been seen in this type of vehicle with respect to the re-
sults obtained using only individual models. Finally,
a global model for any camera position would avoid
the work of having to train an individual model every
time a new system is placed in the real environment.
As future work, the plan is to take recordings of
longer duration, and in real traffic situations in an ur-
ban environment, as well as to extend the simulation
training set, with new camera positions and different
traffic directions, and to test it with different datasets
in which there are recordings in real environment in
different locations. In addition, the system can be
tested on a multi-lane road, trying to detect the speed
of vehicles in each lane individually, using computer
vision techniques.After this, we could try to imple-
ment a real time system on roads, obtaining data such
as the system’s computation speed, and also, being
able to be compared with other types of radars, whose
errors in the national territory, according to the atuori-
ties, oscillates between 5 and 7 km/h for speeds below
100km/h.
ACKNOWLEDGEMENTS
This work has been funded by research grant
SBPLY/19/180501/000093 (Community Region of
Castilla la Mancha), and partially funded by research
grants S2018/EMT-4362 SEGVAUTO 4.0-CM (Com-
munity Region of Madrid) and PID2020-114924RB-
I00 (Spanish Ministry Science Innovation)
KDIR 2022 - 14th International Conference on Knowledge Discovery and Information Retrieval
194

Figure 9: Real environment test. Sequence with a vehicle at 70km/h.
REFERENCES
Barros, J. and Oliveira, L. (2021). Deep speed estimation
from synthetic and monocular data. In 2021 IEEE In-
telligent Vehicles Symposium (IV), pages 668–673.
Biparva, M., Llorca, D. F., Izquierdo, R., and Tsotsos,
J. K. (2022). Video action recognition for lane-change
classification and prediction of surrounding vehicles.
IEEE Transactions on Intelligent Vehicles.
Dong, H., Wen, M., and Yang, Z. (2019). Vehicle speed
estimation based on 3d convnets and non-local blocks.
Future Internet, 11.
Dosovitskiy, A., Ros, G., Codevilla, F., Lopez, A., and
Koltun, V. (2017). CARLA: An open urban driving
simulator. In Proceedings of the 1st Annual Confer-
ence on Robot Learning, pages 1–16.
Elvik, R. (2011). Developing an accident modification func-
tion for speed enforcement. Safety Science, 49:920–
925.
ERSO, EC (2018). Speed enforcement 2018. European
Road Safety Observatory.
Fern
´
andez-Llorca, D., Hern
´
andez-Mart
´
ınez, A., and
Garc
´
ıa-Daza, I. (2021). Vision-based vehicle speed
estimation: A survey. IET Intelligent Transport Sys-
tems, 15(8):987–1005.
Lee, J., Roh, S., Shin, J., and et al. (2019). Image-based
learning to measure the space mean speed on a stretch
of road without the need to tag images with labels.
Sensors, 19.
Llorca, D. F., Salinas, C., Jim
´
enez, M., Parra, I., Morcillo,
A. G., Izquierdo, R., Lorenzo, J., and Sotelo, M. A.
(2016). Two-camera based accurate vehicle speed
measurement using average speed at a fixed point.
In 2016 IEEE 19th International Conference on In-
telligent Transportation Systems (ITSC), pages 2533–
2538.
Luvizon, D. C., Nassu, B. T., and Minetto, R. (2017). A
video-based system for vehicle speed measurement in
urban roadways. IEEE Transactions on Intelligent
Transportation Systems, 18:1393–1404.
Madhan, E. S., Neelakandan, S., and Annamalai, R. (2020).
A novel approach for vehicle type classification and
speed prediction using deep learning. Journal Comp.
Theor. Nano., 17:2237–2242.
Martinez, A. H., D
´
ıaz, J. L., Daza, I. G., and Llorca, D. F.
(2021). Data-driven vehicle speed detection from syn-
thetic driving simulator images. In 2021 IEEE Inter-
national Intelligent Transportation Systems Confer-
ence (ITSC), pages 2617–2622.
Parimi, A. and Jiang, Z. (2021). Dynamic speed estima-
tion of moving objects from camera data. In NAE-
CON 2021 - IEEE National Aerospace and Electron-
ics Conference, pages 307–316.
Revaud, J. and Humenberger, M. (2021). Robust automatic
monocular vehicle speed estimation for traffic surveil-
lance. In 2021 IEEE/CVF International Conference
on Computer Vision (ICCV), pages 4531–4541.
Rodr
´
ıguez-Rangel, H., Morales-Rosales, L. A., Imperial-
Rojo, R., Roman-Garay, M. A., Peralta-Pe
˜
nu
˜
nuri,
G. E., and Lobato-B
´
aez, M. (2022). Analysis of statis-
tical and artificial intelligence algorithms for real-time
speed estimation based on vehicle detection with yolo.
Applied Sciences, 12(6).
Sochor, J., Jur
´
anek, R., and Herout, A. (2017). Traffic
surveillance camera calibration by 3d model bound-
ing box alignment for accurate vehicle speed measure-
ment. Computer Vision and Image Understanding,
161:87–98.
Wilson, C., Willis, C., Hendrikz, J. K., and et al. (2010).
Speed cameras for the prevention of road traffic in-
juries and deaths. Cochrane Database of Systematic
Reviews, 11.
Towards View-invariant Vehicle Speed Detection from Driving Simulator Images
195
