
Algorithms for Freight Train Scheduling
Lucas Morais
1
, Rodrigo Gonc¸alves
2
, Alexandre Tazoniero
2
and Fernando Gomide
1 a
1
School of Electrical and Computer Engineering, University of Campinas, Campinas, S
˜
ao Paulo, Brazil
2
Nitryx Progress Rail, Research and Development, Campinas, S
˜
ao Paulo, Brazil
Keywords:
Train Scheduling, Genetic Algorithms, Scheduling Generation Algorithms.
Abstract:
This paper develops train scheduling algorithms for freight railroads using scheduling generation and genetic
algorithms. First scheduling generation procedures developed in the realm of job shop manufacturing are
tailored for freight railroad applications. The scheduling generation procedures are used to create feasible
populations to start genetic algorithms. Next, it suggests a novel representation and encoding mechanism
based on random keys and job permutation encoding inspired in flexible job shop scheduling. In freight
railroads a common goal is to minimize overall maximum transit time, analogous to minimize the makespan
in manufacturing systems. The genetic algorithms whose initial population are produced by the scheduling
generation algorithms are compared with the random key-job permutation algorithm developed herein. An
example rail line is used to evaluate the performance of the algorithms. The exact optimal solution for the
example rail line, found using the OR Tools solver, is used as a baseline. The results suggest that all approaches
may produce optimal solutions, but the random key-job permutation algorithm consistently performs best
amongst the remaining ones.
1 INTRODUCTION
Freight rail transportation systems are one of the pre-
ferred solutions to move raw materials, commodities
and goods between warehouses, production and dis-
tribution centers, port and airport terminals. To re-
main competitive in a market with increased pressure
for efficiency, sustainability and reliability, continu-
ous improvement is required to keep the railroads at-
tractive. Today railroads are looking for new tech-
nologies and restructuring their operation and man-
agement practice to better fit market demand and for
better transportation services. Advanced train control
and planning systems and their associated technolo-
gies and algorithms have substantially improved the
railroad industry productivity during the last decades
(Harker, 1995). Undoubtedly, movement planning of
trains in a rail network is a challenge, and the sched-
ules a movement plan produces have a major impact
in the operational economics and performance of the
network.
Many railroad networks are made of single tracks
segments with sidings at intervals along the line. The
sidings allow trains running in opposing directions to
meet and pass, or trains running in the same direction
a
https://orcid.org/0000-0001-5716-4282
to overtake each other. Sidings are short stretches of
double track, usually long enough to hold one train.
The task of train scheduling is to develop a safe, con-
flict free feasible meet-pass plan, a movement plan
in which trains cross or overtake each other at sidings
only. Traditionally, movement planning and train con-
trol are done by experienced dispatchers who, in addi-
tion to safety, must avoid line blocking situations, and
attempt to minimize train delays and operating costs.
Train scheduling is a very large, complex, com-
binatorial problem consisting of tens of thousands of
variables. One way to tackle the complexity of the
problem is to select an appropriate tool to help the
dispatchers in the decision-making process. Decision
support systems with automated techniques to gen-
erate and optimize train schedules is a tool that has
been shown to be effective in practice. Many differ-
ent approaches can be used to generate train sched-
ules: artificial intelligence, combinatorial optimiza-
tion, simulation, and their combinations, as it will be
discussed in the next section. The approach taken
in this paper is based on genetic algorithms because,
when endowed with an appropriate representation and
encoding mechanism, they can effectively explore the
search space and find schedules with satisfactory per-
formance. As is well recognized in evolutionary com-
74
Morais, L., Gonçalves, R., Tazoniero, A. and Gomide, F.
Algorithms for Freight Train Scheduling.
DOI: 10.5220/0011379500003332
In Proceedings of the 14th International Joint Conference on Computational Intelligence (IJCCI 2022), pages 74-81
ISBN: 978-989-758-611-8; ISSN: 2184-3236
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

putation area, representation and encoding is of ulti-
mate importance in evolutionary computation due to
the impact they have in producing feasible schedules
using genetic operations efficiently.
The aim of this paper is to address freight train
scheduling from the point of view of scheduling gen-
eration algorithms, combination of scheduling gener-
ation algorithms with genetic algorithms, and a novel
approach based on random keys and job permutation
encoding. Much of the conceptual inspiration of the
approaches addressed here comes from job shop and
flexible job shop scheduling theory. It is known that,
if trains are viewed as jobs, and tracks as machines,
then train scheduling can be modeled as a job shop
problem (Liu and Kozan, 2009). However, to the
best of the authors knowledge, train scheduling has
not yet been approached from the point of view ad-
dressed in this paper. In particular, the representation
and encoding scheme suggested herein is novel and
benefits from the effectiveness of random keys to en-
code sequences, and from the representation power
of permutation schedules. These are important is-
sues because the genetic operators will always pro-
duce feasible individuals during generations, which
precludes the need of repairing or similar feasibil-
ity checking techniques, what considerably increases
computational efficiency. The paper also solves a
simple example to show how the solutions produced
by the scheduling algorithms addressed in the paper
compare with the optimal value found by OR-Tools,
a state of the art, industry standard solver.
After this introduction, the paper proceeds as fol-
lows. Next section gives a brief overview of the main
approaches developed for train scheduling. Section 3
details the scheduling generation and the genetic al-
gorithms for train scheduling addressed in this work.
Section 4 reports the results for the example rail line,
and Section 5 concludes the paper summarizing its
contributions and work to be developed in the future.
2 TRAIN SCHEDULING REVIEW
The complexity of rail operations, the current traf-
fic increase trend, and obstacles to expand railroad
infrastructure turn train scheduling and management
strategies into a key mechanism to improve railroad
operation and services. There is an extensive lit-
erature on train scheduling. This section focuses
mainly on optimization models, genetic algorithms,
and heuristic methods to develop optimized train
schedules. Further information can be found in e.g.
(Harrod, 2012) and the references therein.
The first explicit mathematical programming ap-
proach to train scheduling was formulated as a lin-
ear integer optimization model (Szpigel, 1973). The
formulation and the solution algorithm was inspired
in the job-shop problem. In this formulation, branch-
ing is done dynamically by adding constraints accord-
ingly to the value of the branching decision variable.
This scheme speeds up the solution of the candidate
problems of each node in the search tree. This for-
mulation eliminates the direct manipulation of binary
variables, but at the cost of unrealistic assumptions
such as unlimited siding capacity.
In a similar vein, optimal pacing of trains in
freight railroads has been studied in (Kraay et al.,
1991) using a nonlinear mixed optimization model
that outputs meet-pass plans and the speed of trains in
each track segment to simultaneously minimize tran-
sit time and fuel consumption. A modified branch and
bound algorithm has been devised in (Higgins et al.,
1996), adopting a modeling scheme similar to (Kraay
et al., 1991). The goal is to minimize train delays
at the destination station, considering trains priorities,
and operating costs.
Using genetic algorithms, taboo search, and their
combinations, (Higgins et al., 1997) also solves the
single line train scheduling aiming at minimizing de-
lays. A more sophisticated genetic algorithm ap-
proach was developed in (Tornos et al., 2008) to
minimize the average delay of trains at their des-
tinations. The authors use a sequence of pairs
(train, single track) to represent the order in which
the trains travel through the tracks, track allocation to
trains always occurring at the earliest time allowed.
The authors also uses a regret-based biased random
sampling technique to generate a population of feasi-
ble initial schedules.
Heuristic techniques for single line train schedul-
ing was addressed in (Sahin, 1999) using a proce-
dure that attempts to reduce the difference between
the schedule produced and the one expected by a train
dispatcher. A fuzzy set-based approach was devised
in (Vieira et al., 1999) as well as in (Tazoniero et al.,
2007) where it is compared with a heuristic search al-
gorithm. A genetic algorithm is also adopted in (Gar-
risi and Cristina, 2020) with a heuristic procedure to
generate initial populations. The purpose is to min-
imize train delays with penalties for routes of lower
priority.
Multi-objective schemes include (Ghoseiri et al.,
2004) under the ε-constraint formulation to generate
non-inferior solutions considering fuel consumption
and the transit time of trains. Alternatively, (Sun et al.,
2014) produces optimal train schedules also using a
multi-objective genetic algorithm, but considering the
Algorithms for Freight Train Scheduling
75

average transit time of each train, the total transit time
of trains, and energy consumption as goals.
Recently, advances in decision support, manage-
ment and communication systems, as well as data
technologies opened a range of novel possibilities,
such as data-driven movement planning and opera-
tions management (Wen, 2019). Train operation data
from control and monitoring rooms are an invaluable
resource to examine and assess actual operations to
improve railroad network performance based on data-
driven decisions.
3 SCHEDULING ALGORITHMS
Roughly speaking, train schedules are timetables that
identify the arrival and departure time of each train at
each rail station or track segment in the train route.
This section introduces a class of algorithms for train
scheduling. It starts by defining the train schedule
problem of interest. Next it details the scheduling
generation algorithm and its use in the genetic algo-
rithms addressed in the paper.
3.1 Train Scheduling
A typical train scheduling problem consists of finding
a set of arrival and departure times for each train at
each track segment of their routes in a rail line, taking
into account possible conflicts between trains over the
track segments. Routes are specified by a set of con-
tiguous track segments connecting trains’ origins to
their destinations. In addition to the arrival and de-
parture times for each train at each track segment, a
solution of a train scheduling problem must satisfy all
the temporal ordering constraints, and avoid track oc-
cupation conflicts. Solutions are evaluated according
to an objective function. This paper assumes that the
objective function is to minimize the maximum tran-
sit time of the schedule, which is called the makespan
in job shop literature.
The first step to develop train schedules is to char-
acterize the feasible solutions, the ones that make
physical sense. In railroads, feasibility means con-
tinuity of movement of each train from one track to
the immediate next track in its route, which induce
temporal ordering constraints. Each track segment in
turn has a capacity, which is one train only for sin-
gle track segments, and a prescribed number of tracks
for sidings. Trains meet-pass, that is, crossing and
overtaking must occur at the sidings only. This pa-
per assumes that the sidings have enough capacity to
accommodate as many trains as needed.
A schedule in which trains move along the tracks
as soon as they are available, that is, in which there
are no unnecessary waits, is called semiactive. The
set of semiactive schedules is equivalent to the set of
all schedules with no superfluous idle time. This set
dominates the set of all schedules, which means that
it is sufficient to consider only semiactive schedules
to optimize any time measure of performance. This
is important because the number of semiactive sched-
ules is finite, although it may well be quite large. The
exact number is usually difficult to determine. For a
n trains scheduling problem, in which each train tra-
verses exactly once each of the m tracks, each track
must process n trains. The number of possible se-
quences is therefore n! for each track. If the sequences
on each track were entirely independent, there would
be (n!)
m
semiactive schedules (French, 1982). How-
ever, the precedence structure of the route of each
train, as well as the track occupancy constraints usu-
ally render some of the potential combinations infea-
sible which means that the number of feasible sched-
ules is bounded by (n!)
m
.
Moreover, the transit time of a train can usually be
reduced by changing the order of one of the trains in
a sequence that orders train movements in the tracks.
A schedule in which there are no unnecessary waits,
and it is not possible to reorder a movement of one of
the trains without increasing the total transit time is
called an active schedule. Similarly as in the job shop
problem, active schedules are the smallest dominant
set of the class of train scheduling problem treated in
this paper. It can be shown that an optimal solution
is an element of the set of active solutions (French,
1982).
3.2 Generation of Train Schedules
As pointed out earlier, train scheduling is conceptu-
ally similar to job-shop scheduling. This similarity
suggests the use of the schedule generation algorithm
introduced in (Giffler and Thompson, 1960) as a start-
ing point to produce schedules which simultaneously
are feasible and active (Yamada and Nakano, 1997).
Schedule generation procedures treat trains in an or-
der that is consistent with the precedence relation in-
duced by the train route. In other words, no train is
assigned to a track segment until all its predecessors
have been scheduled. Generation of active schedules
procedures are important because they produce only
schedules that are candidates for an optimal solution.
An instance of a systematic approach to gener-
ate active train schedules, denoted as GT for short,
is summarized by the GT Algorithm below. The GT
algorithm sequentially assigns trains to each track,
considering the transit times (tt) of the trains in each
ECTA 2022 - 14th International Conference on Evolutionary Computation Theory and Applications
76

track segment they must pass through in its route to
destination, and solves track occupation conflicts us-
ing an appropriate resolution strategy, or randomly.
Random conflict resolution generates schedules eas-
ily and quickly.
Algorithm 1: GT Algorithm.
1: for all trains and line track segments do
2: identify the shortest transit time ts
3: if number of trains with (tt ≥ ts) > 1 then
4: select one randomly (or using a rule)
5: end if
6: identify next track the trains will move to
7: if trains compete for track occupation then
8: select one randomly (or using a rule)
9: end if
10: schedule the selected train
11: end for
It worth to note that the generation of feasible and
active solutions for train scheduling may require that
multiple trains occupy a siding simultaneously, a fact
that does not occur in the classic job-shop models.
Notice that steps 4 and 8 of Algorithm GT al-
lows conflict resolution randomly, but instead of
purely random decisions, the algorithm opens possi-
bilities for more efficient conflict resolution mecha-
nisms aiming at minimizing the total transit time e.g.
using priority rules.
3.3 Genetic Algorithms
This section briefly explains the idea of genetic al-
gorithm for application oriented readers, and charac-
terizes the class of genetic algorithm adopted in the
paper.
A genetic algorithm can be understood as a
population-based optimization procedure inspired in
the evolutionary process (Eiben and Smith, 2015).
Genetic algorithms are iterative procedures that move
a population of candidate solutions towards popula-
tions whose individuals have higher chance to achieve
better fit, that is, toward solutions with better values
of the objective function. The canonical genetic al-
gorithm is summarized in Algorithm GA below. The
idea is to mimic the selective pressure, inspired by the
Darwinian natural selection mechanism, and to apply
operators to select (Selection), crossover (Recombi-
nation), and mutate (Mutation) individuals of the pop-
ulation, expecting to produce better solutions in future
generations than those of the current population.
Solutions are, in general, represented by encod-
ing the original variables of the problem, e.g. using
binary, real, alpha numeric strings, or combinations.
The fitness (objective function) measures the suitabil-
ity of each individual of the population, as a candi-
date solution. Selection is an operation that chooses
the individuals which should be part of the popula-
tion of the next generation (iteration). Often, a ran-
dom choice criteria that favor higher fitness individu-
als are used. Crossover is a recombination operation
that produces off-springs by splitting and merging the
selected individuals. Its purpose is to exchange parts
of the individuals that contribute most to improve the
objective function. Mutation operator produces varia-
tions in the off-springs to promote variability and di-
versity, enhancing the search process in finding opti-
mal solutions.
This paper uses the binary tournament selection
operator, which consists of random choices of two in-
dividuals, with replacement, from the population, but
selecting only the one with the highest fitness. The
genetic algorithm adopted is elitist, namely, the best
solutions found are kept in the population of the fu-
ture generations.
Algorithm 2: GA Algorithm.
1: P ← GT train schedule . initial population
2: while stop criteria does not hold do
3: S ← Selection(P)
4: R ← Recombination(S)
5: P ← Mutation(R)
6: end while
7: return best individual . optimal solution
3.4 Random Keys to Set Priority Rules
in the GT Algorithm
Random keys is an effective encoding strategy for se-
quencing problems (Bean, 1994). Sequences are en-
coded indirectly as lists of random numbers. The
sequence implied by a list is the one that aligns the
first element of the sequence with the lowest random
component, the second element with the next lowest,
and so on. Hence, the position in the sequence de-
pends on the position it occupies in the ordered list
of elements, not on the value of the variable. There-
fore, random keys guarantee feasible off-springs after
crossover and mutation operations. Clearly, a genetic
algorithm with random keys encoding can be used to
evolve conflict resolution rules needed in the steps 4
and 8 of the GT algorithm as an attempt to improve
the quality of the schedules generated.
One of the simplest approaches, denoted by GT1,
assigns a fixed priority to each train to resolve track
occupancy conflicts: the train with highest priority is
the one assigned to the track. A second, more flexible
approach denoted by GT2, is to set a priority per train
per single track line segment, which means that single
track assignments to trains will be done according to
the train-track priority list when resolving conflicts.
Algorithms for Freight Train Scheduling
77

3.5 Genetic Algorithm with Train
Activity List Encoding
Differently from the approach suggested in the next
section of this paper, the encoding scheme of (Tornos
et al., 2008) uses an activity list to represent a solu-
tion. In other words, a schedule is encoded as a feasi-
ble precedence list of pairs (train, single track
i
), that
is, if (train, single track
x
) and (train, single track
y
)
are the jth and kth gene of a chromosome of the same
individual and x < y, then j < k.
Specialized crossover and mutation operators are
required to keep the precedence constraints feasible
during evolution. Crossover is such that, for each
pair of parents, the two offspring inherit their first l
genes from one of the parents, the remaining genes
sequentially inherited from the other parent, skipping
the genes that are the same as those of the first parent.
The value of l is chosen randomly. Mutation is done
as follows: for each pair (train, single track
i
) in the
sequence, a new position is randomly chosen. This
new position must be higher than its predecessor and
lower than its successor.
The initial population in (Tornos et al., 2008) is
created using an iterative heuristics based on a ran-
dom sampling methods repeated as many times as
the population size. Unfortunately, no further details
were reported. However, the activity list encoding and
genetic operations can be used with an initial popula-
tion created as follows: 1) GT algorithm with random
conflict resolution, denoted by TRA, 2) GT algorithm
with priority rule by train, denoted by TGT1, and 3)
GT generation algorithm with priority rules by train
and per single track line segment, denoted by TGT2.
3.6 Genetic Algorithm with Random
Keys Encoding of the Train Order
A novel alternative, inspired by the flexible job shop
literature approaches (Driss et al., 2015), uses an en-
coding with random keys in a step prior to the encod-
ing schemes used in flexible job shop. In this new
encoding scheme, each individual consists of blocks
to represent the trains to be scheduled. A train block
is represented by a real-valued vector with as many
components as the number of single track segments
of the rail line. Each value does not specify a specific
single track for the train as this will be determined
when decoding the individual. This encoding step is
shown as step 1 in Fig. 2. The figure refers to the ex-
ample depicted in Fig. 1, which consists of two trains
running in opposing directions in a line with three sin-
gle tracks segments numbered 1, 2 and 3, a siding of
capacity 2 between segments 1 and 2 shown as a hor-
Figure 1: Example for the RDK encoding.
Figure 2: Interpretation of RKD encoding.
izontal line, and another siding with capacity 2, the
horizontal line between segments 2 and 3.
Random keys decoding requires the components
of the real vector representation of each individual
to be ordered, in ascending order in this paper, illus-
trated as step 2 in Fig. 2. After ordering, each variable
value corresponds a train, as shown in step 3 of Fig. 2.
Next, each train is assigned to the sequence of single
tracks in the route from its origin to its destination,
shown in step 4. Interestingly, as the step 5 shows,
this new encoding scheme subsumes the one devel-
oped in (Tornos et al., 2008).
Because this novel encoding scheme is based on
random keys, simple crossover and mutation opera-
tors, such as arithmetic crossover and Gaussian muta-
tion can be readily used, with no need of repairing or
any procedure to keep scheduling feasibility. The ge-
netic algorithm with this encoding scheme is denoted
by RKD.
4 RESULTS
The performance of the algorithms were evaluated us-
ing a six trains, seven tracks scheduling problem in-
stance. Briefly, the case study used here considers
a rail line with four single track segments with three
sidings between them, each siding with capacity of
five tracks. Three trains depart from each end of the
line, with the departure time interval between trains
limited by track availability, like in typical tonnage-
ECTA 2022 - 14th International Conference on Evolutionary Computation Theory and Applications
78
based freight rail operation. Single track segments
can be occupied by one train only, which means that
there are no signaling blocks in the single tracks be-
tween sidings. It is worth to recall that the complex-
ity of a n trains and m tracks scheduling problem is
bounded by (n!)
m
. For n = 6 and m = 4 the cardinal-
ity of the search space is bounded by 10
11
. Table 1
summarizes the remaining data needed to develop the
schedules.
Evaluations were done running the genetic algo-
rithms 100 times each for 100 generations using a
population of 100 individuals. The TGT1 and TGT2
algorithms started using the GT1 and GT2 schedule
generation and run for a warm-up period of 50 gen-
erations before the remaining 100 generations run for
comparisons. This give them an extra advantage, but
was done purposely to hard check the performance of
RKD.
The parameters, namely the crossover and muta-
tion rates, employed by the algorithms were found ex-
perimentally. The values of the parameters that pro-
duced the best results are given in Table 2.
Evaluation and comparison of the results pro-
duced by the algorithms are done against the
solution of a mixed-integer optimization train
scheduling model formulated similarly as the
job shop problem reported in (Rardin, 2017).
That is, for benchmark purposes, the optimal
solution of the model found by the OR-Tools
solver (https://developers.google.com/optimization/
scheduling/job shop) is used as the baseline. Cur-
rently, the OR-Tools job-shop scheduling solver
is one of the standards adopted by academia and
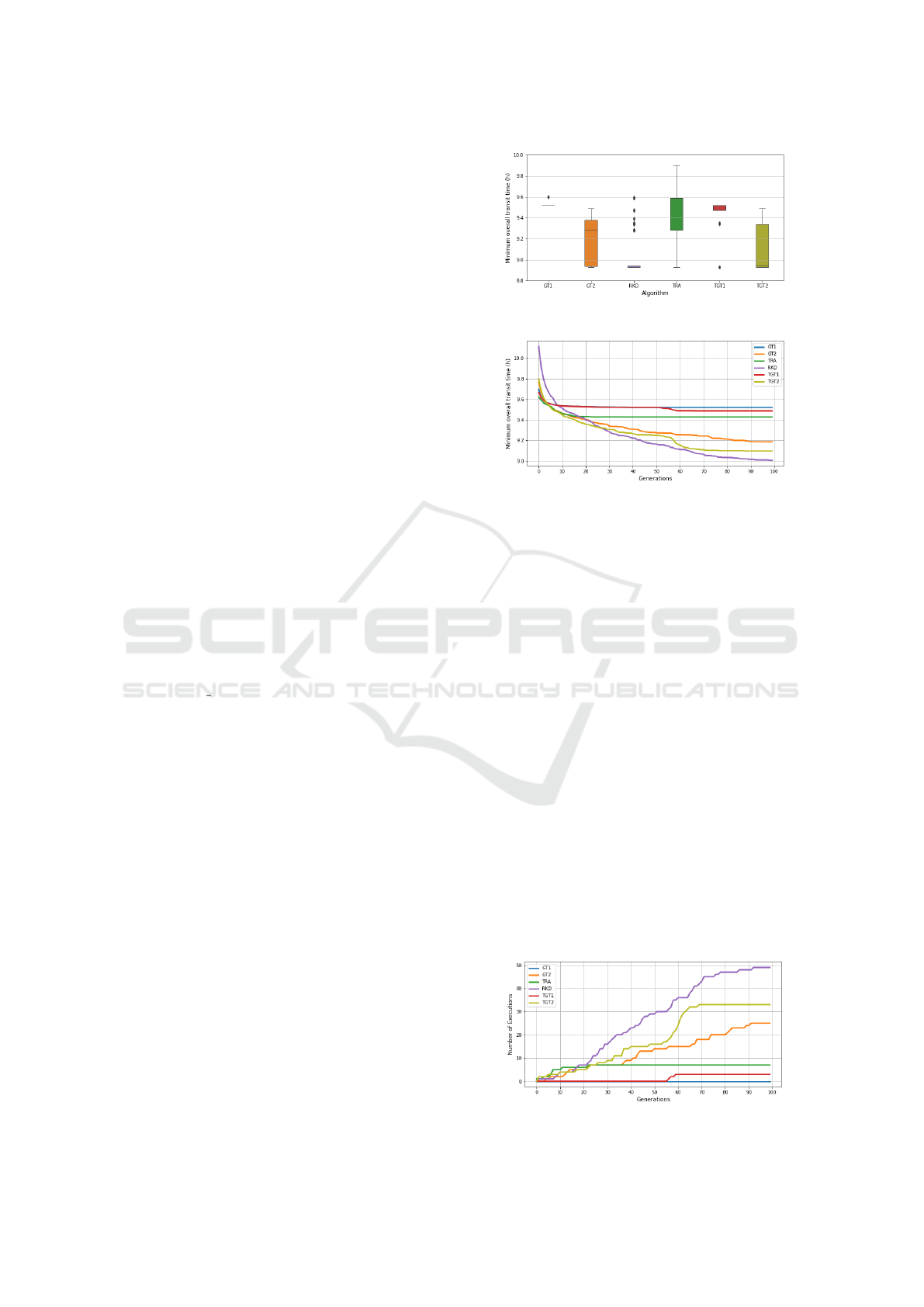
industry. The objective function value of the optimal
solution found by the solver is 8.93 hours. This is the
minimum value of the maximum overall transit time
achieved.
Fig. 3 shows that GT1 was the only approach that
did not produce the optimal solution in any run, while
the RKD and TGT2 consistently did it. Fig. 4 and
Fig. 5 show that, despite the initial unfavorable ini-
tialization, RDK produces superior solutions within
few generations. Fig. 4 also suggests that the solu-
tions produced by GT2 and RKD could be improved
if more generations were allowed, what is not the case
with the remaining algorithms. Fig. 5 further shows
that TGT1 and TGT2 improve the initial populations
of GT1 and GT2, respectively, but only TGT2 per-
forms better than TRA. Fig. 6 shows the train graph
of the optimal schedule.
Table 3 gives the average run time of each algo-
rithm. Notice that, because its efficient encoding ap-
proach, the RKD is the fastest. Also notice that GT1,
GT2, TGT1 and TGT2 algorithms are considerably
Figure 3: Minimum transit time for 100 runs.
Figure 4: Average best solutions.
slower because of the iterative nature of the schedul-
ing generation algorithm GT. The run times figures
are for runs using the Google Colaboratory Intel(R)
Xeon(R) CPU @ 2.20GHz, with 12GB of RAM.
Summing up, the novel representation and encod-
ing mechanism based on random keys and job per-
mutation encoding developed herein has shown to be
very effective for the class of train scheduling ad-
dressed in this paper. It gives a simple and mean-
ingful way to represent sequences and precedence,
and allows the use of the efficient genetic operators
to speed up the resulting genetic algorithm. The com-
putational experiments also suggest that random keys
and job permutation encoding increases the chance of
the genetic algorithm to produce optimal schedules,
and runs faster than alternative genetic algorithms de-
veloped for train scheduling. Currently, mathematical
programming-based decision support systems for ex-
act train scheduling remain a challenge for railroads
worldwide. There is, however, no doubt that even an
imperfect scheduling and movement planning tool is
preferable over no tool at all, or manual planning. It
is clear that mathematical programming software and
computing power have advanced dramatically during
Figure 5: Number of runs to produce the optimal solution.
Algorithms for Freight Train Scheduling
79
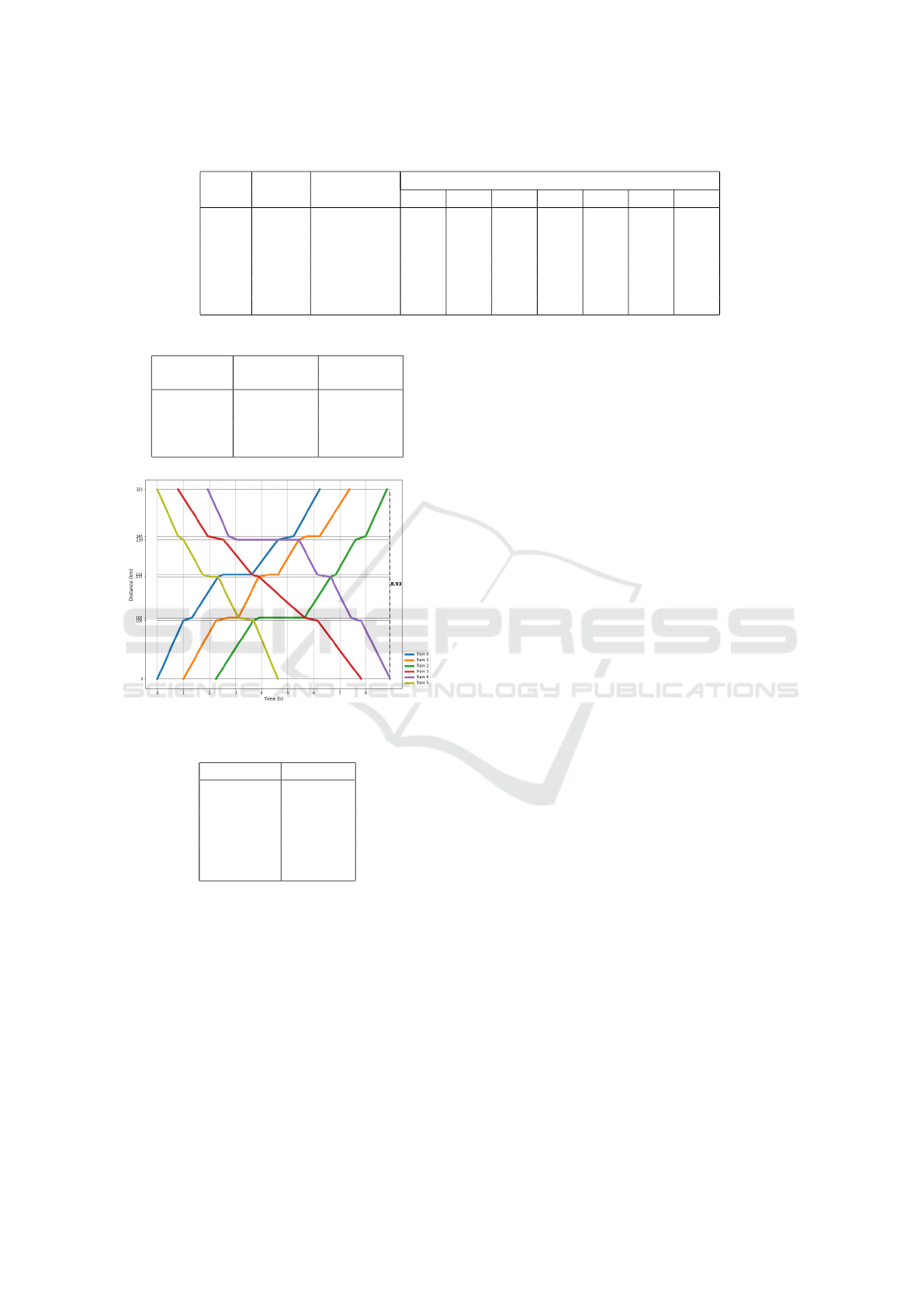
Table 1: Train scheduling example data.
Train Origin Destination Transit Time on Track (in hours)
Track Track 0 1 2 3 4 5 6
0 0 6 1 0.33 1 0.2 1 0.6 1
1 0 6 1.25 0.5 0.78 0.4 0.8 0.3 1.14
2 0 6 1.43 0.25 1 0.2 0.75 0.4 0.8
3 6 0 1.67 0.5 1.75 0.27 1.09 0.6 1.14
4 6 0 1.11 0.3 0.78 0.4 0.71 0.33 0.8
5 6 0 0.91 0.6 0.78 0.27 0.75 0.2 0.8
Table 2: Parameters of the genetic algorithms.
Algorithm Crossover Mutation
probability probability
GT1 1.0 0.40
GT2 0.8 0.40
TRA 0.8 0.05
RKD 1.0 0.30
Figure 6: Train graph of the optimal schedule.
Table 3: Average run times (sec/generation).
Algorithm Run time
GT1 0.5062
GT2 0.5006
TRA 0.0635
TGT1 0.2915
TGT2 0.3034
RKD 0.0460
last years, but train scheduling and movement plan-
ning are computationally demanding enough to war-
rant precise modeling and exact solutions.
5 CONCLUSION
This paper has introduced a class train scheduling al-
gorithms for freight railroads within the framework of
scheduling generation and genetic algorithms. First
it suggested an instance of scheduling generation al-
gorithm that constructs feasible active train sched-
ules. Next it developed genetic algorithms that starts
with the feasible populations created by the schedul-
ing generation algorithms and maintains feasibility of
all individuals during the generations. No repair tech-
nique is required to keep populations feasible.
A novel encoding scheme based on random keys
and job permutation was suggested in the paper. The
genetic algorithm that uses this novel scheme has
shown to particularly effective to find the optimal so-
lution, that is, the schedule that minimizes the maxi-
mum transit time of the set of trains.
The algorithms were compared against the exact
solution found by solving a corresponding mixed-
integer optimization model using OR-Tools, currently
an academic and industry standard. The results sug-
gest that the genetic algorithm with random keys and
job permutation encoding performs best when com-
pared with the remaining ones, and appears to be a
promising avenue for further exploration. This is im-
portant because in practice many complex operational
constraints must be accounted for, which is easier to
be handled by genetic algorithms than classic opti-
mization algorithms.
However, more work is needed to measure how
the algorithms scale when the number of trains and
tracks increase, when sidings capacity are tightened,
when there is a need to trade-off transit time against
fuel consumption and environment impact, or when
uncertainties in transit times, maintenance of the way,
re-crew, and track outages are relevant for the opera-
tional agenda.
Parallel and multi-threading processing appear to
be a potential path to explore, especially when real-
time re-scheduling decisions should be undertaken.
These are issues to be pursued in the near future.
ACKNOWLEDGEMENTS
The authors acknowledge the anonymous reviewers
for their helpful and constructive comments. The last
author is grateful to the Brazilian National Council for
Scientific and Technological Development for grant
302467/2019-0
ECTA 2022 - 14th International Conference on Evolutionary Computation Theory and Applications
80

REFERENCES
Bean, J. (1994). Genetic algorithms and random keys for
sequencing and optimization. In ORSA Journal on
Computing. vol. 6, no. 2, pp. 154–160.
Driss, I., Mouss, K., and Laggoun, A. (2015). A new ge-
netic algorithm for flexible job-shop scheduling prob-
lems. In Journal of Mechanical Science and Technol-
ogy. vol. 29, pp. 1273–1281.
Eiben, A. and Smith, J. (2015). Introduction to Evolution-
ary Computing. Springer, London, 2nd edition.
French, S. (1982). Sequencing and Scheduling: An Intro-
duction to the Mathematics of the Job-Shop. Wiley
Ellis Horwood Series in Mathematics and its Applica-
tions, London.
Garrisi, G. and Cristina, C. (2020). Train scheduling op-
timization model for railway networks with multiple
stations. In Sustainability. vol. 12, no. 1, pp. 257–282.
Ghoseiri, K., Szidarovszky, F., and Asgharpour, M. (2004).
A multi-objective train scheduling model and solu-
tion. In Transportation Research Part B: Methodolog-
ical. vol. 38, no. 10, pp. 927–952.
Giffler, B. and Thompson, G. (1960). Algorithms for solv-
ing production scheduling problems. In Operations
Research. vol. 8, no. 4, pp. 487–503.
Harker, P. (1995). Services and technology: Reengineering
the railroads. In Interfaces. vol. 25, no. 3, pp. 72–80.
Harrod, S. (2012). A tutorial on fundamental model struc-
ture for railway timetable optimization. In Surveys in
Operations Research and Management Science. vol.
17, pp. 85–96.
Higgins, A., Kozan, E., and Ferreira, L. (1996). Optimal
scheduling of trains on a single line track. In Trans-
portation Research Part B: Methodological. vol. 30,
no. 2, pp. 147–161.
Higgins, A., Kozan, E., and Ferreira, L. (1997). Heuristic
techniques for single line train scheduling. In Journal
of Heuristics. vol. 3, no. 1, pp. 43–62.
Kraay, D., Parker, P., and Chen, B. (1991). Optimal pacing
of trains in freight railroads: Model formulation and
solution. In Operations Research. vol. 39, no. 1, pp.
82–99.
Liu, S. and Kozan, E. (2009). Scheduling trains as a block-
ing parallel-machine job shop scheduling problem. In
Computers and Operations Research. vol. 36, no. 10,
pp. 2840–2852.
Rardin, R. (2017). Optimization in Operations Research.
Pearson Higher Educations, Hoboken, 2nd edition.
Sahin, I. (1999). Railway traffic control and train schedul-
ing based on inter-train conflict management. In
Transportation Research Part B: Methodological. vol.
33, no. 7, pp. 511–534.
Sun, Y., Cao, C., and Wu, C. (2014). Multi-objective opti-
mization of train routing problem combined with train
scheduling on a high-speed railway network. In Trans-
portation Research Part C: Emerging Technologies.
vol. 44, pp. 1–20.
Szpigel, B. (1973). Optimal train scheduling on a single
track railway. In Operational Research ’72, Proceed-
ings of the Sixth IFORS International Conference on
Operational Research. IFORS, North-Holland Pub-
lishing, London. pp. 343–352.
Tazoniero, A., Gonc¸alves, R., and Gomide, F. (2007). Deci-
sion making strategies for real-time train dispatch and
control. In Analysis and Design of Intelligent Systems
using Soft Computing Techniques. Springer, vol. 41,
pp. 195–204.
Tornos, A., Lova, A., Ingolotti, L., Abril, M., and Salido, M.
(2008). A genetic algotiyhm for railway scheduling
problems. In Studies in Computational Intelligence.
vol. 128, pp. 255–276.
Vieira, P., Bessa, E., and Gomide, F. (1999). Railway dis-
patch planning and control. In Proc. l8th International
Conference of the North American Fuzzy Information
Processing Society, NAFIPS. pp. 134–138.
Wen, C. (2019). Train dispatching management with data-
driven approaches: A comprehensive review and ap-
praisal. In IEEE Access. vol. 7, pp. 114547–114571.
Yamada, T. and Nakano, R. (1997). Job-shop scheduling. In
Genetic Algorithms in Engineering Systems. IEE Con-
trol Engineering Series 55, pp. 134–160.
Algorithms for Freight Train Scheduling
81
