
A Rolling Horizon Approach for the Dynamic Scheduling of Flying Taxis
Sana Ikli
Hybrid Intelligence, Capgemini Engineering, 4 Avenue Didier Daurat, 31700 Blagnac, France
Keywords:
Flying Taxis, Dynamic Scheduling, Genetic Algorithm, Heuristic Solutions, Rolling Horizon Approaches.
Abstract:
Flying taxis are a promising alternative to ground transportation to alleviate the congestion problem in
metropolitan cities. The launching of the first air taxis is expected in the next few years. The companies
operating air taxi services will deal with several real-time problems. Such problems include the scheduling
of flying taxi operations, and the battery charging management as well as other maintenance issues. In this
work, we are interested in the dynamic scheduling of flying taxis, so as to serve a set of clients. This problem
is on the one hand under-explored in the literature, as we will show in the next sections, and on the other hand,
it is more realistic than the static case. We present in this work a rolling-horizon approach, integrated with
three heuristics, to solve the dynamic scheduling of flying taxis. We also construct new realistic and difficult
instances to test and validate our algorithms. Our instances and implementations are publicly available for the
scientific community online. Finally, we perform a computational study on our generated instances to show
the benefits and the limits of each heuristic.
1 INTRODUCTION
Air taxis are expected to serve as an alternative to
ground transportation to alleviate traffic congestion
in metropolitan cities (Rajendran and Zack, 2019).
Several transportation pioneers and airline manufac-
turers are preparing to launch their Urban Air Mo-
bility (UAM)
1
services in the near future. Indeed,
Airbus Helicopters is currently working on new elec-
tric flying taxis as a part of the CityAirbus Nextgen
project (Dumez, 2021). Their flying taxis are ex-
pected to operate in 2025. Apart from Airbus, Uber
is also working on an air taxi service called Uber Ele-
vate, which is estimated to lunch in 2023 (Rajendran
and Zack, 2019).
Due to the dynamic nature of the problem, the
companies proposing air taxi service will deal with
several real-time decision problems. Such decisions
include (i) evaluating different candidate trips and
scheduling the flying taxis so as to optimize a given
objective (e.g., reduce the operational costs, maxi-
mize the profit from the trips, serve the maximum
number of demands, etc.), (ii) dynamic estimation
of the market demands, and (iii) battery charging
management as well as other maintenance related-is-
sues (Rajendran and Srinivas, 2020).
The scheduling of air taxi operations combines
two problems from the literature: parcel delivery
drones, and ground taxi demand scheduling. The for-
1
Acronyms meaning are also outlined in Table 3.
mer is used to derive the general characteristics of the
flying taxis; the latter helps to design the schedul-
ing models, objectives, and constraints. The prob-
lem consists in dispatching a fleet of air taxis so as
to serve the costumers, while respecting several op-
erational constraints. The constraints can be divided
in two categories: (i) flying taxi-related constraints,
like the vertical take-off and landing restrictions, and
the battery recharging constraints, and (ii) customer’s
constraints, such as the time-windows that are a spec-
ified period of time during which the customer can be
served. Other flying taxi characteristics such as the
operating time, the battery recharging time, and bat-
tery consumption rate are also present in the parcel
delivery drones.
The ground taxi demand scheduling consists in
dispatching a fleet of ground taxis to serve a set of
clients. Serving a client includes the transportation
from an origin to a destination point, taking into con-
sideration several operational constraints such as the
time-windows and the traffic jam. A time-window is
a specified time slot during which a customer can be
served. The objective of this problem is usually to
maximize profit. According to (Tangpattanakul and
Quenel, 2021), the profit from a ground-taxi trip is
usually calculated using: (i) a base rate (initial charge
for the first kilometers), (ii) a distance rate (count of
the next kilometers), and (iii) a minute rate (cost of
waiting time in case of congestion). The profit from a
flying taxi however should involve only the base and
Ikli, S.
A Rolling Horizon Approach for the Dynamic Scheduling of Flying Taxis.
DOI: 10.5220/0011376500003332
In Proceedings of the 14th International Joint Conference on Computational Intelligence (IJCCI 2022), pages 65-73
ISBN: 978-989-758-611-8; ISSN: 2184-3236
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
65

the distance rates, since there will be no traffic jam in
low level airspace (Kellermann et al., 2020). In the
dynamic case, the scheduler must be flexible to ac-
commodate unpredictable events that may occur, such
as: the traffic jam, new requests, changes in the cus-
tomer location, etc.
The scheduling of flying taxis can be classified in
two main categories, according to the availability of
the data:
• The static case, when all input data are known in
advance before the day of the operations.
• The dynamic or the real-time case, when all or
some input parameters are unknown for the con-
sidered scheduling horizon. This case is under-
explored in the literature, and to the best of our
knowledge, only the work of (Rajendran, 2021)
considers this problem.
In this work, we are interested in the dynamic
management of a fleet of flying taxis. The manage-
ment includes the dynamic scheduling of the flying
taxis as well as the battery charging handling. This
work is one of the few (Rajendran, 2021) that consid-
ers the (more realistic) real-time problem, where de-
cisions have to be made dynamically to accommodate
the new changes in the air taxi system. The contribu-
tions of our paper are summarized as follows:
• Efficient scheduling heuristics to solve small
problem instances. These heuristics are the first-
come, first-served, the nearest neighbor, and the
genetic algorithm.
• A Rolling Horizon (RH) framework coupled with
the above-mentioned heuristics to solve larger in-
stances and to tackle the dynamic case.
• New realistic and challenging problem instances
that are publicly available from https://github.c
om/sanaikli/Dynamic-Flying-Taxi-Scheduling.
• A comparative study of the proposed RH ap-
proaches.
2 LITERATURE REVIEW
The scheduling of flying taxis is similar to two well-
known combinatorial optimization problems, namely
the Job-Shop Scheduling Problem (JSSP) and the Ve-
hicle Routing Problem (VRP). The analogy between
these problems is highlighted in Section 2.4. Since
the literature on the dynamic scheduling of flying
taxis is very scarce, we propose in this section an
overview of the research articles addressing the gen-
eral problems of the dynamic machine scheduling and
vehicle routing. The goal of this literature review is
to give insights to the readers on how the dynamic
scheduling and routing are tackled for different well-
known problems, that are similar to the problem of
our interest.
2.1 Dynamic Machine Scheduling
The static scheduling assumes that all problem param-
eters are known in advance and they do not change.
In the actual production process, several disturbances
may occur, such as a delayed processing time, the
arrival of new jobs, etc., which make the previous
schedule obsolete. To accommodate the new changes,
one must constantly adjust the scheduled plan, in a
process known as dynamic scheduling.
A common strategy used in the literature to tackle
the dynamic scheduling is the Rolling Horizon (RH)
approach. The latter, also referred to as receding hori-
zon, usually subdivides the scheduling horizon into
smaller sub-horizons, and then solves the static prob-
lem on each sub-horizon sequentially. In the RH ap-
proaches, there are jobs that will start inside a sub-
horizon and finish outside that sub-horizon, regard-
less of its length. This kind of jobs is called cross-
window jobs. To deal with them, boundary conditions
have to be defined for each sub-horizon. On the other
hand, the computation complexity is expected to be
reduced in the sub-horizons, since the problem size is
smaller. The RH scheduling approaches can be cate-
gorized into two types of strategies:
• The event-driven scheduling in which the rolling
horizon is a job window, i.e., a number of jobs
for scheduling and processing. This strategy first
chooses a job window, which is defined by the (al-
lowed) maximum number of jobs. Then, it divides
the set of jobs in three sub-sets: (i) the sub-set
of available jobs, (ii) the sub-set of current jobs,
and (iii) the sub-set of finished jobs. A selection
rule is then used to select jobs from the sub-set
of available jobs. Finally, an optimization algo-
rithm is required to solve the problem in the job
windows, and the three above-mentioned sets are
updated until all the jobs are processed. Notable
examples from the literature that use this approach
are (Chen et al., 2017; Fang and Xi, 1997). The
former work used this strategy to solve the online
workflow scheduling on cloud environment, and
the latter used it for the classical dynamic JSSP.
• The periodic scheduling strategies in which the
rolling domain is a time window, i.e., a time slot
on the scheduling horizon. This strategy is used
in (Sun and Lin, 1994) to solve the dynamic JSSP.
In this work, the authors subdivide the planning
horizon, T , into two non-overlapping windows,
ECTA 2022 - 14th International Conference on Evolutionary Computation Theory and Applications
66

T
1
and T
2
. Some heuristic rules are used for this
subdivision. Then, they solve the (static) problem
on T
2
. Finally, they determine the set of cross-
window jobs and schedules them with the jobs in
the window T
1
.
The periodic scheduling is also used in (Tang
et al., 2010), but with a different rolling time-
window. In this context, the planning horizon, de-
noted [0,K], is subdivided in R time periods of
equal lengths. Then, the problem is solved in the
whole planning horizon at the beginning. As time
progresses, the window is shortened by one time
period, and the problem is again solved in the new
window, as illustrated in Fig. 1.
the 1st rolling window
the 2nd rolling window
the 3rd rolling window
0
t
T 2T K
1
Figure 1: A rolling horizon with three rolling windows.
2.2 Dynamic Vehicle Routing Problem
In the dynamic vehicle routing problem, the cus-
tomer orders are usually considered to be the dy-
namic events. The RH approach is also used to solve
this problem. For instance, in the work of (Hanshar
and Ombuki-Berman, 2007), the periodic scheduling
strategy is used, but with time-windows that differs
from (Sun and Lin, 1994) and (Tang et al., 2010). In-
deed, in (Hanshar and Ombuki-Berman, 2007) , the
authors subdivide the planing horizons into several
slices of equal lengths. Then, they sequentially solve
the (static) VRP on each slice. Furthermore, the au-
thors define a cutoff time, which postpones the late
orders to the next day. The genetic algorithm is then
used to solve the static problem on each time slice.
A number of heuristic solutions are proposed
in (Larsen et al., 2002) to solve the dynamic VRP.
Examples of such heuristics are:
• First-Come First-Served (FCFS) that serves the
clients in the order which they are.
• Nearest Neighbor (NN) that completes the de-
mands in one location, and then travels to the
nearest neighboring demand.
2.3 Real-time Scheduling and Routing
of Air Vehicles
The works in the literature addressing the real-time
scheduling and routing of air taxis are rare compared
to the machine scheduling or the VRP. Nonetheless,
the two recent works (Rajendran, 2021) and (Song
et al., 2016) consider this dynamic scheduling for two
types of air vehicles: the flying taxis for the former
work, and the Unmanned Aerial Vehicle (UAV) for
the latter.
In (Song et al., 2016), the authors develop a real-
time tool to manage a fleet of UAVs to serve cus-
tomers. The management includes visiting the service
station for battery recharging. The problem is formu-
lated as a mixed-integer program, and solved using
CPLEX solver (Holmstrom et al., 2009). The real-
time management is performed using the two RH ap-
proaches: the event-driven and the periodic schedul-
ing strategies presented in Section 2.1.
In the very recent work of (Rajendran, 2021), the
author considers the real-time dispatching of air taxis
in a centralized taxi network. Two objectives are
taken into account: minimizing the number of idle
taxis and minimizing the total travel time of air taxis
at inactive state. Since these two objectives are con-
flicting, the author uses a goal programming algo-
rithm to solve the problem. The proposed strategy
to handle the real-time demands is similar to the one
used in (Sun and Lin, 1994). However, (Rajendran,
2021) does not consider explicit rolling windows, but
rather defines some control points on the schedul-
ing horizon, and re-solve the problem at each control
point. To the best of our knowledge, this is the only
work in the literature that considers the dynamic fly-
ing taxi scheduling.
2.4 Analogy and Complexity
The problem of scheduling flying taxi operations
is similar to two well-known combinatorial opti-
mization problems, namely the Job-Shop Schedul-
ing Problem (JSSP) and the Vehicle Routing Problem
(VRP).
The analogy between a JSSP and the scheduling
and routing of air taxis can be described as follows.
The machines represent the flying taxis, and the jobs
represent the demands. The trip duration of a given
demand can be interpreted as the processing time of
a job in the JSSP framework. A fundamental aspect
of the flying taxis framework is the battery charging;
the latter can be translated to the JSSP model as the
machine breakdown.
In addition, the scheduling and routing of air taxis
is clearly similar to the VRP. In the two frameworks,
we have vehicles to dispatch and clients to serve. The
classical time-windows constraints (Belhaiza et al.,
2019) in the VRP framework can directly be trans-
lated to the scheduling of flying taxis. Finally, the
battery charging of an air taxi can be viewed as the
A Rolling Horizon Approach for the Dynamic Scheduling of Flying Taxis
67

vehicle refueling.
As a consequence of these analogies, we can de-
rive two conclusions. On the one hand, the prob-
lem of scheduling flying taxis, the JSSP, and the
VRP have the same complexity: they are NP-hard
problems (JSSP and the VRP are already proven to
be NP-hard (Mohan et al., 2019; Derigs and Vogel,
2014)). On the other hand, exact methods may require
long computation times as the problem size increases.
Hence, heuristic methods are more suitable to solve
this scheduling problem, especially the dynamic case,
where decisions have to be made in real-time.
3 DYNAMIC FLYING TAXI
SCHEDULING: ROLLING
HORIZON APPROACH
In the static flying taxi scheduling, it is assumed that
complete information about customers requests are
known in advance. In the dynamic case however,
new requests may arrive on the planning horizon and
the solution must be revised. Hence, it is appropriate
to adopt a rolling-horizon approach, to accommodate
the new changes and reschedule the demands accord-
ingly.
3.1 Rolling Horizon Framework
The RH approach we adopt in this work is the pe-
riodic scheduling strategy, introduced in Section 2.1.
The rolling domain in this context is a time-window,
i.e., a time slot on the scheduling horizon. Figure 2
illustrates how this approach works.
Move unserved requests to next window
.. .... ........ . ... .. . .
window
1
window
2
window
R
0
t (min)
T (1440)
...
1
Figure 2: Rolling-horizon strategy illustration.
In the context of our RH strategy, the static prob-
lem is solved in the first rolling window, using heuris-
tic methods for creating a flying taxi schedule. In this
work, we propose three heuristic methods: one is the
GA of (Tangpattanakul and Quenel, 2021) adapted to
our problem; the remaining two heuristics are bor-
rowed from the VRP literature and adapted to the fly-
ing taxis framework. At the end of the first rolling
window, the RH strategy moves the unserved requests
to the beginning of the next window, and schedules
them together with the new available requests. The
battery level for all the available flying taxis is set to
100% at the beginning of the RH approach. Then, its
is updated at the end of each rolling window accord-
ing to the battery consumption rate.
3.2 Heuristic Solutions for Creating
Flying Taxi Schedules
In this subsection we describe two heuristic meth-
ods and a genetic algorithm that we use to solve the
static problem inside each rolling window. The first
two heuristics, named “the First-Come, First-Served”
(FCFS) and the “Nearest-Neighbor” (NN), are bor-
rowed from the VRP literature.
3.2.1 First-Come, First-Served
The FCFS is a classical heuristic method used in prac-
tice to solve several optimization problems, including
the VRP. This heuristic serves the requests according
to the order given by their pick-up times. Indeed, the
demands are sorted according to the non-decreasing
order of their pick-up times. The advanced requests
are served (without considering their location), on
their pick-up times or in an interval – defined by the
user – centered around the pick-up time. The pro-
cess continues until no request is available. The bat-
tery level is checked before each customer pick-up,
and updated after each customer drop-off, according
to the battery consumption rate. If the battery level
of the available taxi is not enough to serve the next
client, then the flying taxi is sent to the center for bat-
tery recharging.
3.2.2 Nearest Neighbor
The NN is also borrowed from the field of vehicle
routing problems. This heuristic serves the closest
requests to the current location of the taxi. Indeed,
for each taxi, the NN scheduler serves first the clos-
est demand to the center. After completing service
at the location of the first demand, the taxi travels
to the nearest neighboring demand and so forth. The
key difference between a FCFS and a NN scheduler is
that the former sorts the customers at the beginning of
the scheduling and then serves them, while the latter
needs to recompute the distances from current request
location to all other unserved requests, to serve the
closest one. This process is repeated after each cus-
tomer drop-off to find the next one to serve. Hence,
this heuristic may lead to longer computation times
than the FCFS. As for the FCFS, the battery level of
each taxi is checked before the customer pick-up, and
updated after its drop-off.
ECTA 2022 - 14th International Conference on Evolutionary Computation Theory and Applications
68

3.2.3 Genetic Algorithm
Genetic algorithms are evolutionary algorithms in-
spired by the process of natural selection. They have
shown their efficiency in solving complex combinato-
rial optimization problems, such as the aircraft land-
ing problem (Hu and Di Paolo, 2011), and the vehi-
cle routing problems (Hanshar and Ombuki-Berman,
2007).
The genetic algorithm we consider in this section
is based on (Tangpattanakul and Quenel, 2021). In
this work, a chromosome is composed of genes whose
values are randomly generated in the interval [0,1].
Each gene represents a demand which is served by a
flying taxi. For example, if we consider an instance
with 3 requests and 2 flying taxis, the total number
of genes is equal to 6 (Figure 3). A solution of the
scheduling problem is constructed from the chromo-
somes, and it contains the following information:
• The sequences of the selected demands which will
be serviced by the flying taxis, and the battery
recharging tasks.
• The set of starting time of each task/demands.
• The set of finishing time of each task/demands.
• The operational time of the selected demands.
Chromosome:
Request 1
served by
Taxi 1
0.5
Request 1
served by
Taxi 2
0.5
Request 2
served by
Taxi 1
0.6
Request 2
served by
Taxi 2
0.1
Request 3
served by
Taxi 1
0.2
Request 3
served by
Taxi 2
0.9
1
Figure 3: Example of a chromosome with six genes (3 re-
quests/2 taxis).
In our adaptation of this algorithm, the demands
can be served during an acceptable time-window,
which is more realistic than serving them on strict
pick-up times, as it is assumed in (Tangpattanakul
and Quenel, 2021). The first population of chromo-
somes is randomly generated. At each iteration, a
new population is generated from three sets of chro-
mosomes: the elite set for the selection process, the
crossover set for the crossover operations and the mu-
tation set for the mutation operations. The elite set
copies the best chromosomes from the previous iter-
ation. The crossover set contains the offspring chro-
mosomes whose gene values are generated from two
different parent chromosomes. The first and the sec-
ond parent are respectively selected from the elite and
the non-elite sets. As for the initial population, the
mutation set is also randomly generated, to help es-
caping from local optimum. The process of mutation
and crossover continues until the stopping criteria is
satisfied. The latter corresponds to a number of iter-
ations since the last improvement. The fitness func-
tion corresponds to the total service time, that the GA
seeks to maximize. The parameters of the GA are
shown in Table 1.
Table 1: Values of the GA parameters.
Parameter Value
Population size 2× (chromosome size)
Elite set size 10% of the population size
Mutation set size 20% of population size
Crossover set size 70% of population size
Crossover probability 0.7
Stopping criterion 30
4 COMPUTATIONAL RESULTS
This section reports the computational results of
implementing the above-mentioned heuristics, inte-
grated in the rolling horizon approach. All experi-
ments are run on a computer under Windows operat-
ing system, processor Intel(R) Core(TM) i5-10310U
with 8 GB of RAM.
In section 4.1, we introduce new data-sets of in-
stances that we generate for the numerical study.
Then, in Section 4.2 we present computational results
of implementing our three heuristics FCFS, NN, and
the GA, all integrated in the RH approach. The test
instances and implementations are publicly available
from the following Link: https://github.com/sanaikli/
Dynamic-Flying-Taxi-Scheduling.
4.1 New Generated Instances
We randomly generate 10 test instances, based on
the instance generator of (Tangpattanakul and Quenel,
2021). In addition to being more congested, our in-
stances define a time window for each demand during
which it can be served, which is more realistic than
imposing a strict pick-up time.
Table 2 summarizes some important characteris-
tics of our instances. Throughout this table, the first,
second and third columns present the name, the to-
tal number of requests, and the total number of air
taxis in each instance (respectively). The fourth col-
umn “req/h” reports the average request per hour in
each instance, which measures how dense the latter
is. The remaining columns show the minimum, av-
erage, and the maximum duration of request trips in
each instance.
A Rolling Horizon Approach for the Dynamic Scheduling of Flying Taxis
69
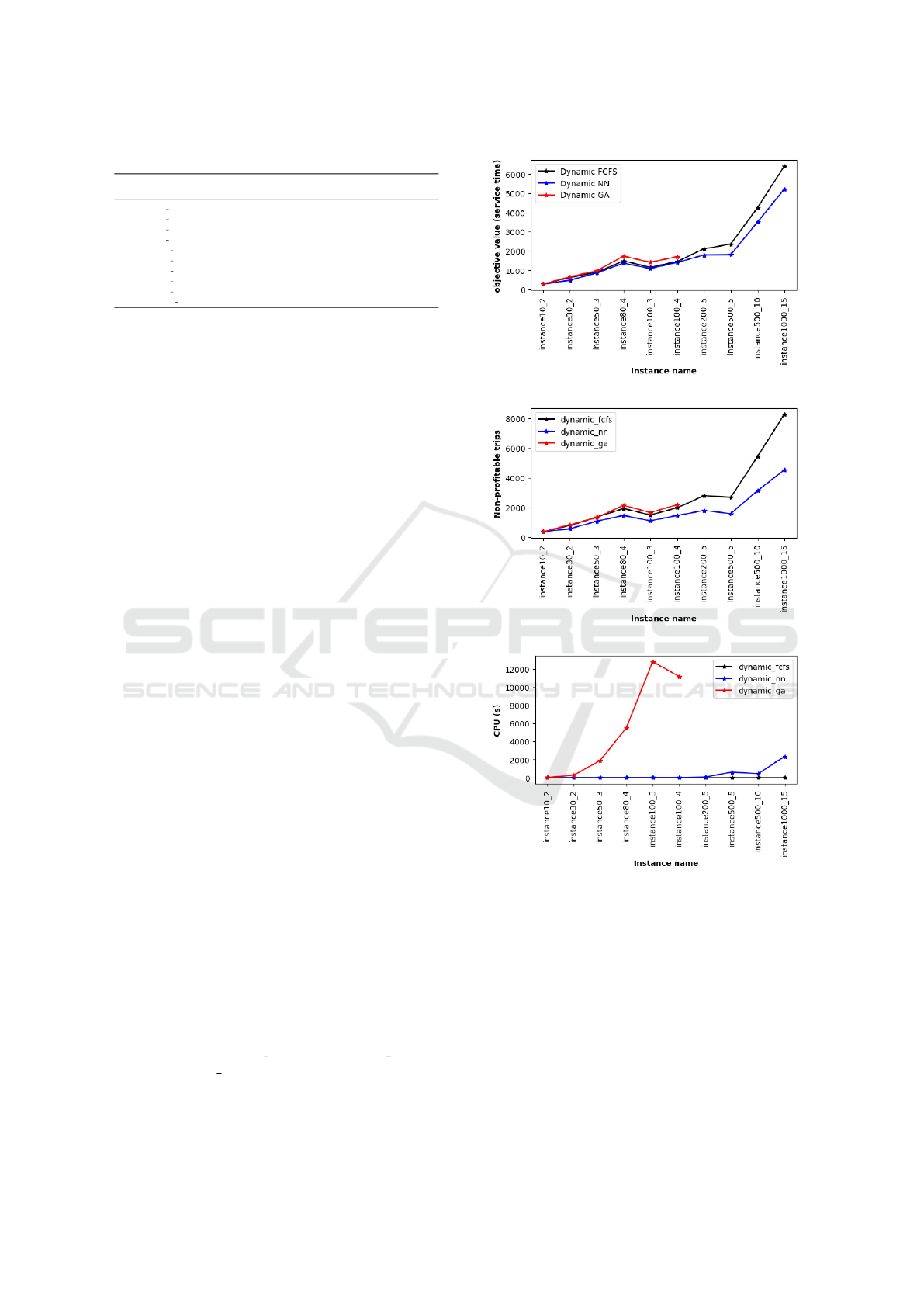
Table 2: Characteristics of the new constructed instances.
Instance name #req #taxis req/h min
duration
average
duration
max
duration
instance10 2 10 2 0.42 17.52 28.16 44.12
instance30 2 30 2 1.25 12.22 26.31 40.61
instance50 3 50 3 2.08 12.16 24.41 43.81
instance80 4 80 4 3.33 11.81 28.58 45.98
instance100 3 100 3 4.17 11.00 26.80 48.57
instance100 4 100 4 4.17 11.48 26.33 48.35
instance200 5 200 5 8.33 11.25 26.97 50.04
instance500 5 500 5 20.83 10.31 27.12 48.33
instance500 10 500 10 20.83 10.74 27.14 51.51
instance1000 15 1000 15 41.67 10.49 27.20 49.35
4.2 Results and Discussion
To compare the quality of the solutions provided by
our heuristics, we define the following performance
indicators:
• The objective-value that indicates the total ser-
vice time (in minutes) that we seek to maximize.
• The non-profitable trips duration that corre-
sponds to the total travel time without passengers.
This may occur when a taxi flies to the center to
recharge its battery, or between two requests.
• The CPU time that indicates the computation
times in seconds.
Figure 4 shows the results of the FCFS, the NN,
and the GA heuristics on the basis of our three perfor-
mance measures. The tests are performed on our gen-
erated instances, involving 10 to 1000 requests and
2 to 15 flying taxis. The name of each instance is
showed in the x-axis of each figure. For these tests,
the parameter of the rolling-window length, R, is cho-
sen to be 60 minutes.
It can be seen in Figure 4 that the three heuristics
obtain similar performances in terms of the objective-
value, for the first six instances. However, in terms
of the non-profitable trips, the NN obtains (as ex-
pected) better results. This may be explained by the
fact that in the NN heuristic, Taxis fly to the near-
est neighboring demand location, which minimizes
the non-profitable trip between two demands loca-
tion. In Figure 4c, we can observe that the FCFS
heuristic requires very short computation times, even
for the very large instances involving more than 100
requests. On the other hand, the computation times
for the GA explodes for instances involving more
than 100 requests, and we couldn’t get any solu-
tion with this heuristic for instances involving 200 or
more requests. With the NN heuristic, we obtain so-
lutions for all the instances in our data set, but the
computation times remain long for the following in-
stances: “instance500 5”, “instance500 10”, and
“instance1000 15‘”.
To improve the performance of the NN heuristic,
in terms of computation times, we relied on the work
(a) Objective value.
(b) Non-profitable trips.
(c) CPU time (seconds).
Figure 4: Comparison of the FCFS with the NN heuristic
on the basis of three performance indicators.
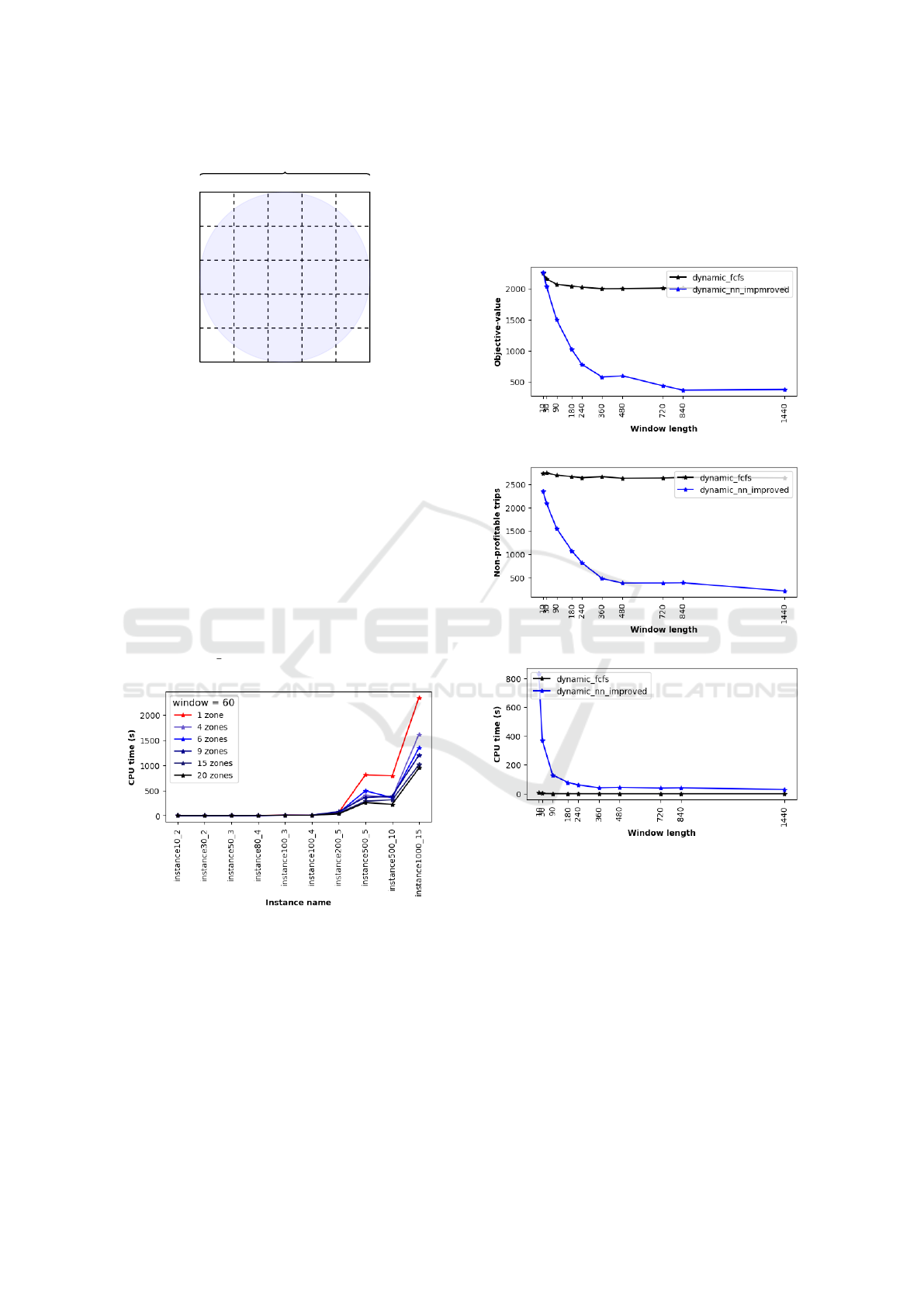
of (Mocnik, 2020). The latter proposes to decom-
pose the space where demands are located into sev-
eral zones, as illustrated in Figure 5. Then, searching
in the current taxi zone for the next neighboring. If no
neighbor is found in the zone, our algorithm extends
the search to the global zone. The author proves that,
by choosing a suitable zone size, the complexity of
the algorithm can be reduced.
We implemented this zone decomposition in our
ECTA 2022 - 14th International Conference on Evolutionary Computation Theory and Applications
70
Demand space
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
..
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
1
Figure 5: Illustration of the decomposition of the space of
requests into 25 zones: the blue dots represent the demands,
and the red numbers represent the zones.
NN algorithm using different number of zones: 4, 6,
9, 15, and 20. Figure 6 shows the new computation
times of our algorithm with this decomposition. In
Figure 6, the curve in red color represents the compu-
tation times when considering only one zone (space
of demand). The remaining curves (shades of blue)
show the results for different number of zones, rang-
ing from 4 to 20. It can be seen in this figure that the
computation times are significantly reduced for the
improved NN heuristic (blue curves), compared to the
naive NN (red curve), for the three above-mentioned
large instances. In particular, for the instance named
“instance1000 15”, the computation times were di-
vided by three in the improved NN with 20 zones.
Figure 6: Computation times of the improved NN heuristic.
Effect of the Window Length
In the previous tests, the rolling-window length was
chosen to be 60 minutes. In this study, we test dif-
ferent values for this parameter in order to choose an
appropriate value for it. These tests are performed on
the FCFS and the improved NN heuristics. For the
rolling window length, ten values are chosen in our
study: 10, 30, 90, 180, 240, 360, 480, 720, 840, and
1440. The latter value correspond to the scheduling
horizon of one day. We perform the tests on our 10
generated instances from Table 2, and the results are
averaged over these tests. In Figure 7, the relation-
ship between the length of the rolling window and
our three performance indicators is plotted, for each
scheduling heuristic.
(a) Objective-value.
(b) Non-profitable trips.
(c) CPU time (seconds).
Figure 7: Effect of the window length on the performance
indicators.
First, we observe that the value of our per-
formance indicators (objective value, non-profitable
trips, and CPU time) decreases with increasing val-
ues of the windows length. In particular, the CPU
of the improved NN heuristic drastically decreases in
the interval [10, 180] (Figure 7c). Results in Figure 7
suggest that a window length in the interval [90, 180]
can be a good compromise between the quality of the
solutions – in terms of the objective-value and the du-
ration of the non-profitable trips – and the CPU time.
A Rolling Horizon Approach for the Dynamic Scheduling of Flying Taxis
71

5 CONCLUSION AND
PERSPECTIVES
In this paper, we consider the problem of the dynamic
scheduling of flying taxis. In this context, all or some
problem parameters are unknown in the considered
scheduling horizon. We propose a rolling-horizon ap-
proach, coupled with some heuristics from the litera-
ture to solve the dynamic case. The heuristics are: the
First-Come, First-Served (FCFS), the Nearest Neigh-
bor (NN), and the Genetic Algorithm (GA).
We conduct several computational experiments to
compare the FCFS and the NN heuristics with the ge-
netic algorithm. Results suggest that the FCFS is a
good alternative to the GA, because it obtains com-
petitive results and has very short computation times.
Moreover, the computation times of the NN heuristic
are improved by integrating the decomposition pro-
posed in (Mocnik, 2020). The GA is efficient to solve
small and medium instances, involving less than 80
demands. However, for the large instances, this algo-
rithm requires very long computation times, making
it unsuitable for a real-time application.
For future studies, we will allow taxis to serve
multiple requests in one trip, because serving one
client at a time may not be very profitable for the taxi
company. We will also construct additional perfor-
mance measures that could express better the profit
obtained from the flying taxi trips.
REFERENCES
Belhaiza, S., M’Hallah, R., Ben Brahim, G., and Laporte,
G. (2019). Three multi-start data-driven evolutionary
heuristics for the vehicle routing problem with multi-
ple time windows. Journal of Heuristics, 25:485–515.
Chen, H., Zhu, J., Zhang, Z., Ma, M., and Shen, X. (2017).
Real-time workflows oriented online scheduling in
uncertain cloud environment. The Journal of Super-
computing, 73:4906–4922.
Derigs, U. and Vogel, U. (2014). Experience with a frame-
work for developing heuristics for solving rich vehicle
routing problems. Journal of Heuristics, 20:75–106.
Dumez, H.-O. (2021). Un taxi volant pour circuler au-
dessus des bouchons : le projet d’airbus se concr
´
etise.
https://actu.fr/occitanie/toulouse 31555/toulouse-un
-taxi-volant-pour-\\circuler-au-dessus-des-bouchon
s-\\le-projet-d-airbus-se-concretise 45082439.html.
Online; accessed Mai 13, 2022.
Fang, J. and Xi, Y. (1997). A rolling horizon job shop
rescheduling strategy in the dynamic environment.
The International Journal of Advanced Manufactur-
ing Technology, 13:227–232.
Hanshar, F. and Ombuki-Berman, B. (2007). Dynamic ve-
hicle routing using genetic algorithms. Applied Intel-
ligence, 27:89–99.
Holmstrom, K., Goran, A. O., and Edvall, M. M. (2009).
V12. 1: User’s manual for CPLEX. International
Business Machines Corporation, 46:106 pages.
Hu, X.-B. and Di Paolo, E. A. (2011). A ripple-spreading
genetic algorithm for the aircraft sequencing problem.
Evolutionary Computation, 19:77–106.
Kellermann, R., Biehle, T., and Fischer, L. (2020). Drones
for parcel and passenger transportation: A literature
review. Transportation Research Interdisciplinary
Perspectives, 4:13 pages.
Larsen, A., Madsen, O. B. G., and Solomon, M. (2002).
Partially dynamic vehicle routing—models and algo-
rithms. Journal of the operational research society,
53:637–646.
Mocnik, F.-B. (2020). An improved algorithm for dynamic
nearest-neighbour models. Journal of Spatial Science,
pages 1–28.
Mohan, J., Lanka, K., and Rao, N. A. (2019). A review
of dynamic job shop scheduling techniques. Procedia
Manufacturing, 30:34–39.
Rajendran, S. (2021). Real-time dispatching of air taxis
in metropolitan cities using a hybrid simulation goal
programming algorithm. Expert Systems with Appli-
cations, 178:(13 pages).
Rajendran, S. and Srinivas, S. (2020). Air taxi service for
urban mobility: A critical review of recent develop-
ments, future challenges, and opportunities. Trans-
portation research part E: logistics and transportation
review, 143:(20 pages).
Rajendran, S. and Zack, J. (2019). Insights on strategic air
taxi network infrastructure locations using an iterative
constrained clustering approach. Transportation Re-
search Part E: Logistics and Transportation Review,
128:470–505.
Song, B. D., Kim, J., and Morrison, J. R. (2016). Rolling
horizon path planning of an autonomous system of
UAVs for persistent cooperative service: MILP for-
mulation and efficient heuristics. Journal of Intelligent
& Robotic Systems, 84:241–258.
Sun, D. and Lin, L. (1994). A dynamic job shop scheduling
framework: a backward approach. The International
Journal of Production Research, 32:967–985.
Tang, L., Jiang, S., and Liu, J. (2010). Rolling horizon ap-
proach for dynamic parallel machine scheduling prob-
lem with release times. Industrial & engineering
chemistry research, 49:381–389.
Tangpattanakul, P. and Quenel, I. (2021). Optimal schedul-
ing for flying taxi operation. In Proceedings of
the 13th International Joint Conference on Computa-
tional Intelligence - Volume 1: ECTA, pages 141–148.
SciTePress.
ECTA 2022 - 14th International Conference on Evolutionary Computation Theory and Applications
72

APPENDIX: ACRONYMS
Table 3: Table of acronyms.
Acronym Meaning
JSSP Job-Shop Scheduling Problem
RH Rolling Horizon
UAM Urban Air Mobility
UAV Unmanned Aerial Vehicle
VRP Vehicle Routing Problem
A Rolling Horizon Approach for the Dynamic Scheduling of Flying Taxis
73
