
A Comparative Study of Graph Neural Network Speed Prediction during
Periods of Congestion
Marko C. Oosthuizen
1,2 a
, Alwyn J. Hoffman
1 b
and Marelie H. Davel
1,2,3 c
1
Faculty of Engineering, North-West University, South Africa
2
Centre for Artificial Intelligence Research (CAIR), South Africa
3
National Institute for Theoretical and Computational Sciences (NITheCS), South Africa
Keywords:
Traffic Prediction, Congestion, Graph Neural Network.
Abstract:
Traffic speed prediction using deep learning has been the topic of many studies. In this paper, we analyse
the performance of Graph Neural Network-based techniques during periods of traffic congestion. We first
compare a selection of recently proposed techniques that claim to achieve good results using the METR-LA
and PeMS-BAY data sets. We then investigate the performance of three of these approaches – Graph WaveNet,
Spacetime Neural Network (STNN) and Spatio-Temporal Attention Wavenet (STAWnet) – during congested
periods, using recurrent congestion patterns to set a threshold for general congestion through the entire traffic
network. Our results show that performance deteriorates significantly during congested time periods, which
is concerning, as traffic speed prediction is usually of most value during times of congestion. We also found
that, while the above approaches perform almost equally in the absence of congestion, there are much bigger
differences in performance during periods of congestion.
1 INTRODUCTION
Traffic speed prediction forms an important element
of the management of metropolitan traffic networks-
Deep neural networks are one of the most success-
ful techniques used for this purpose, and many differ-
ent approaches have been published in recent litera-
ture (Mena-Oreja and Gozalvez, 2020). The results of
traffic speed prediction are used to advise both traffic
authorities and road users about the best course of ac-
tion to limit or avoid congestion. As a result, predic-
tion accuracy is of most importance during times of
congestion, as little action is required from either road
users or the traffic management system when traffic is
flowing normally.
When evaluating speed prediction methods dur-
ing both congested and not congested periods, it is
observed that prediction accuracy tends to deterio-
rate under congestion (Polson and Sokolov, 2017).
The high prediction accuracies claimed by many re-
searchers may therefore be somewhat misleading, as
the published performance levels are achieved when
a
https://orcid.org/0000-0003-2514-8135
b
https://orcid.org/0000-0003-4909-1073
c
https://orcid.org/0000-0003-3103-5858
averaging the performance of the model for congested
and not congested times, while much worse perfor-
mance is observed during periods when the prediction
algorithms are mostly needed.
In this paper, we evaluate state-of-the-art (SOTA)
deep learning traffic speed prediction methods based
on their performance during periods of congestion.
The rest of the paper is organised as follows: Sec-
tion 2 contains a survey of related work. In Section
3 we describe the methodology and data used for the
study. Section 4 contains the results of the conges-
tion analysis, and in Section 5 we conclude and make
recommendations for future work.
2 BACKGROUND
Traffic speed prediction attracts much attention be-
cause of the high costs associated with congestion in
big cities (Polson and Sokolov, 2017; Mena-Oreja and
Gozalvez, 2020). Due to lack of space and funds, it is
in most cases not possible to significantly expand ex-
isting road networks in densely populated urban areas
(Shi et al., 2019). Other methods to address traffic
congestion must therefore be considered.
Oosthuizen, M., Hoffman, A. and Davel, M.
A Comparative Study of Graph Neural Network Speed Prediction during Periods of Congestion.
DOI: 10.5220/0011374100003332
In Proceedings of the 14th International Joint Conference on Computational Intelligence (IJCCI 2022), pages 331-338
ISBN: 978-989-758-611-8; ISSN: 2184-3236
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
331

Traffic congestion can be alleviated through more
effective traffic management, as well as by providing
road users with more intelligent advice regarding the
routes to select to move from a specific origin to a spe-
cific destination (Nagy and Simon, 2018). One of the
primary information elements that enables more accu-
rate decision-making in such circumstances is knowl-
edge about future expected traffic speeds on the dif-
ferent road sections forming part of the urban road
network (Xu et al., 2018). Such information can for
instance be used to modify the current cycle lengths
of traffic lights (Gunawan and Chandra, 2014), or in-
crease the accuracy with which the expected travel
time along a specific route can be estimated (Gandhi
et al., 2020).
Deep neural networks have been proven to
outperform older techniques such as Autoregres-
sive Integrated Moving Average (ARIMA), vector
ARIMA, Support Vector Machines (SVMs) and oth-
ers (
ˇ
Zliobait
˙
e and Khokhlov, 2016). Different neural
network architectures have been developed for this
purpose, based on a variety of approaches includ-
ing Long-Short Term Memory (LSTM), adversarial
networks and graph-based networks (
ˇ
Zliobait
˙
e and
Khokhlov, 2016). A common requirement for these
techniques is the ability to simultaneously model both
temporal and spatial aspects of a network’s behav-
ior (Akhtar and Moridpour, 2021). Graph Neural Net-
work (GNN)-based techniques are particularly suc-
cessful, as discussed in more detail in Section 3.2.
Various authors have focused on traffic speed pre-
diction during times of congestion (Zhou et al., 2020;
Chikaraishi et al., 2020). Mohanty (Mohanty, 2018)
found that traffic congestion should be analysed as a
network-wide phenomenon. Large-scale spatial cor-
relation and long-term temporal correlation that gov-
ern traffic congestion propagation across the regional
traffic network may be exploited to develop conges-
tion prediction algorithms that are more effective than
local predictions. A method for the selection of alter-
native routes under traffic congestion was proposed
by Xu et al. (Xu et al., 2018). They developed a deep
learning classifier based on stacked Restricted Boltz-
man Machine layers followed by a backpropagation
layer. A method to predict decongestion time at rail
crossings was proposed by Jiang et al. (Jiang et al.,
2021). They used computer vision techniques to esti-
mate relevant features (such as the number of vehicles
waiting) in to measure and then model decongestion.
None of these works however specifically com-
pared different prediction approaches during periods
of congestion. This is recognised as a gap in existing
knowledge about traffic prediction methods, which
we partially address here. Literature differentiates be-
tween two types of congestion: recurrent and non-
recurrent (Polson and Sokolov, 2017). In this pa-
per, we compare model performance during periods
of both recurrent and non-recurrent congestion.
3 METHODOLOGY
The analysis is conducted using the Los Angeles
Metropolitan Transportation Authority (METR-LA)
and Performance Measurement System (PeMS)-Bay
data sets, described in Section 3.1. We review SOTA
traffic prediction systems (Section 3.2), and use this
to select an approach and establish a benchmark for
the study (Section 3.3). For the selected systems, we
perform a congestion analysis: demonstrating how
model performance differs during congested and not
congested periods, as well as how this changes as the
definition of network congestion changes.
3.1 Data Set and Task
The PeMS-Bay dataset consists of six months of
traffic speed data aggregated into 5-minute win-
dows recorded using 326 sensors in the Bay area
of Los Angeles by California Transportation Agen-
cies (CalTrans) Performance Measurement System
(PeMS). The METR-LA dataset consists of four
months of traffic speed data aggregated into 5-minute
windows recorded using 207 sensors on the highways
of Los Angeles. Both the PeMS-Bay and METR-LA
datasets are used to train traffic forecasting models for
traffic speed prediction. Both of the datasets, as sum-
marised in Table 1, were released by Li et al. (Li et al.,
2018) and are popular when evaluating traffic predic-
tion models (Yang et al., 2021).
Table 1: Dataset characteristics.
METR-LA PeMS-Bay
Sensors 207 326
Period 4 months 6 months
Resolution 5 minutes 5 minutes
Speed unit miles per hour miles per hour
Time-steps 34 272 52 116
Along with the sensor readings, an adjacency ma-
trix, constructed from the pairwise road network dis-
tances between sensors adjusted using a thresholded
Gaussian kernel (Li et al., 2018), is also available for
each dataset.
NCTA 2022 - 14th International Conference on Neural Computation Theory and Applications
332

3.2 System Selection
To select a traffic prediction system, we first review
the published performance of prominent systems for
which implementations are publicly available. The
methods selected for evaluation are briefly described
below.
The Spatial-Temporal Transformer Network
(STTN) consists of stacked spatial-temporal blocks
and a prediction layer (Xu et al., 2020). Each spatial-
temporal block consists of a spatial transformer and a
temporal transformer. In each spatial-temporal block,
the spatial transformer extracts spatial features from
the input node as well as the graph adjacency matrix.
The spatial transformer consists of a spatial-temporal
position embedding layer, a fixed graph convolution
layer, a dynamic graph convolution layer and a gate
mechanism for information fusion.
Graph WaveNet implements a GNN for spatial-
temporal graph modelling by implementing an adap-
tive dependency matrix that does not require any prior
knowledge of the road network. By using stochas-
tic gradient descent the model discovers hidden spa-
tial dependencies by itself (Wu et al., 2019). Dilated
causal convolution is used in the temporal convolution
layer to capture temporal trends of nodes (Wu et al.,
2019).
STAWnet implements multiple stacked spatial-
temporal blocks and output layers. A spatial-temporal
block consists of a gated temporal convolution net-
work and a dynamic attention network. Dilated
causal convolution with a gate mechanism is used
for extracting temporal dependencies as for Graph
WaveNet. To dynamically model spatial dependen-
cies, the self-attention network is used on graph-
structured data to extract patterns in the model (Tian
and Chan, 2021).
Graph Multi-Attention Network (GMAN) fol-
lows the encoder-decoder architecture with a trans-
form attention layer added between the encoder and
decoder to convert the encoded historical traffic fea-
tures to generate future representations. The encoder
and decoder are composed of spatial-temporal atten-
tion blocks (ST-attention blocks). The ST-attention
blocks are composed of a spatial attention mecha-
nism to model dynamic spatial correlations, a tem-
poral attention mechanism to model non-linear tem-
poral correlations, and a gated fusion mechanism
to adaptively fuse spatial and temporal representa-
tions (Zheng et al., 2020).
STNN implements spacetime interval learning to
explicitly capture intrinsic and latent spatio-temporal
correlations through a unified analysis of both spatial
and temporal features. To learn the spatial-temporal
correlations STNN combines novel spacetime atten-
tion blocks and spacetime convolution blocks (Yang
et al., 2021). The spacetime attention block high-
lights the interval between events capturing pair-wise
influences, and the spacetime convolution block ag-
gregates the learned features from spatial, temporal,
and spatial-temporal aspects to capture many-to-one
influences (Yang et al., 2021).
The published performance of these systems is
compared in Tables 2 and 3 for the METR-LA and
PeMS-Bay data sets, respectively. Performance is ob-
tained from the referenced papers as indicated in each
table.
3.3 Establishing a Benchmark
The official source code is available for STNN
1
,
GMAN
2
, STAWnet
3
, and Graph WaveNet
4
. An im-
plementation is available for STTN
5
as well but this
is not referenced by the original proposers of STTN.
Using the available software and settings as specified
by the authors, each of these systems was retrained
on the PeMS-Bay and METR-LA data sets, and the
recreated models evaluated on the official evaluation
sets. It was possible to recreate the results for Graph
WaveNet, STAWnet, and STNN. It was not possi-
ble to recreate the published results for either STTN
or GMAN without altering the available code. For
GMAN we experienced similar issues as were ob-
served by other forum users on Github, while the
STTN code was not being developed further at the
time of writing.
Only Graph WaveNet, STAWnet and STNN were
considered further. For these three models, the perfor-
mance of the published and recreated results is com-
pared in Tables 2 and 3 for the METR-LA and PeMS-
Bay tasks, respectively. Mean Absolute Error (MAE),
Root Mean Square Error (RMSE) and Mean Absolute
Percentage Error (MAPE) are reported, as defined in
Eq. 1 to 3: x
i
is the predicted speed, y
i
is the true
speed over n measurements.
MAE =
∑
n
i=1
|y
i
− x
i
|
n
(1)
RMSE =
r
∑
n
i=1
(y
i
− x
i
)
2
n
(2)
MAPE =
∑
n
i=1
|
y
i
−x
i
y
i
|
n
(3)
1
https://github.com/libingixn/STNN
2
https://github.com/zhengchuanpan/GMAN
3
https://github.com/CYBruce/STAWnet
4
https://github.com/nnzhan/Graph-WaveNet
5
https://github.com/wubin5/STTN
A Comparative Study of Graph Neural Network Speed Prediction during Periods of Congestion
333

A negative percentage indicates that the published
results are better than the recreated results and vice
versa. Comparable results were achieved, verifying
the correctness of the implementations. However, it
was observed that the published results for STNN
were obtained using a different validation and test par-
tition than for the other techniques. In addition, per-
formance was determined by averaging over all the
prediction horizons up to the one reported on, whereas
the prediction errors for the other techniques are de-
termined at an individual prediction horizon only (a
single prediction, a specific number of steps into the
future). The STNN model was thus re-evaluated us-
ing the same test partition as Graph WaveNet and
STAWnet and the same performance measure as for
the other systems. (Note that neither the training data
nor the matching hyperparameters were changed but
that the correct validation set was used to select the
best-performing model from the training sequence.)
The change in the model itself had minimal effect, but
the change in evaluation measure had a significant ef-
fect. This resulted in a decrease in performance, as
indicated by the STNN adjusted results in Tables 2
and 3. Graph WaveNet was therefore found to be the
best performing model with STAWnet producing very
similar results and STNN performing the worst of the
three.
4 ANALYSIS AND RESULTS
In this section, we analyse the performance of the
three methods for which the published results could
be recreated during periods of congestion.
4.1 Binned Traffic Speed Analysis
To evaluate the performance of the different mod-
els during different congestion scenarios, we calcu-
late the MAE of the models’ predictions on different
ranges of traffic speeds. We analyse this in two ways,
by considering the individual sensor speed and over-
all network speed as two different ways in which to
bin predictions. In the first case, binned sensor speed
analysis, the MAE for all individual sensor predic-
tions that fall within a bin for a given horizon are
averaged. In the second case, binned average net-
work speed analysis, if the average network speed
falls within the bin, the MAE of all sensor predictions
at that time step are averaged, irrespective of individ-
ual sensor speeds. In both cases, each prediction hori-
zon is kept separate.
The performance of the three analysed models on
the METR-LA dataset is shown in Fig. 1 for the
Figure 1: Model performance (MAE) for 60 minute predic-
tion horizon, binned per average network speed for METR-
LA test set.
Figure 2: Model performance (MAE) for 60 minute predic-
tion horizon, binned per sensor speeds for METR-LA test
set.
binned average network speed and in Fig. 2 for the
binned sensor speed. As expected, the three models
perform better for faster traffic speeds and worse for
slower traffic speeds. This is an indication of the ex-
tent to which the performance of the traffic forecast-
ing models deteriorates during times of congestion in
the road network. Similar results are observed for the
PeMS-Bay dataset. In both cases, the x ticks indicate
the centre speed value in the bins, and the bins all have
the same sizes.
4.2 Congestion Analysis
All results in this section are reported on the valida-
tion set as we aim to use some of this information
during later congestion modelling. We first analyse
network speed averaged across time and day of the
week, to determine the significance of recurrent con-
gestion. We then analyse the effect of congestion us-
ing different congestion thresholds and three ways to
NCTA 2022 - 14th International Conference on Neural Computation Theory and Applications
334
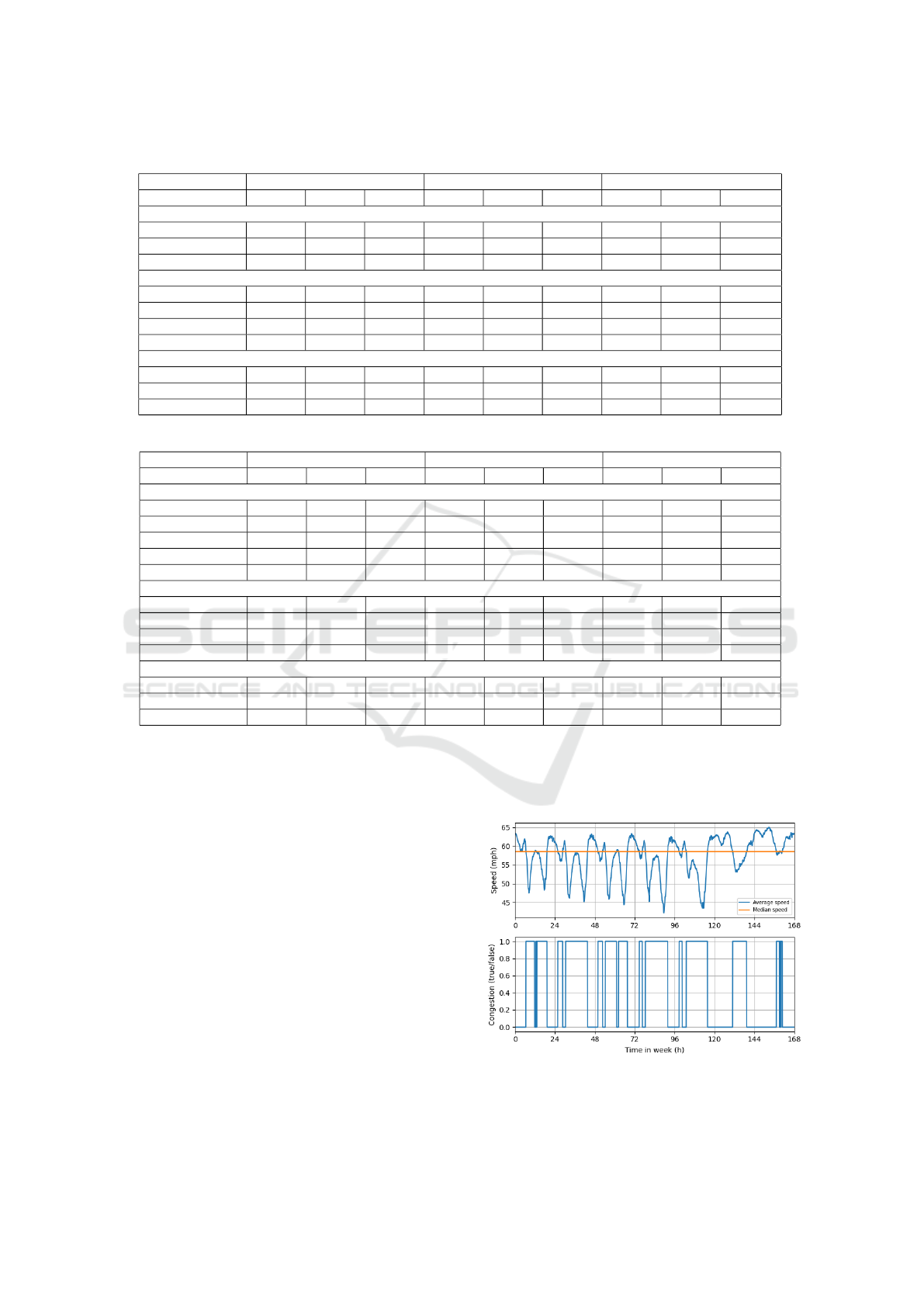
Table 2: Published and recreated performance of selected SOTA traffic speed prediction models: METR-LA, test set.
15 min 30 min 60 min
MAE RMSE MAPE MAE RMSE MAPE MAE RMSE MAPE
Published results
STNN 2.27 4.46 5.80% 2.56 5.29 6.84% 3.01 6.23 8.50%
STAWnet 2.70 5.22 6.98% 3.04 6.14 8.22% 3.44 7.16 9.82%
Graph WaveNet 2.69 5.15 6.90% 3.07 6.22 8.37% 3.53 7.37 10.01%
Recreated results
STNN 2.29 4.45 5.80% 2.59 5.22 6.84% 3.03 6.26 8.94%
STAWnet 2.72 5.26 6.97% 3.08 6.22 8.30% 3.50 7.27 9.96%
Graph WaveNet 2.69 5.13 6.76% 3.05 6.12 8.17% 3.49 7.21 9.82%
STNN adjusted 2.67 5.28 7.31% 3.19 6.47 9.21% 3.96 8.01 12.34%
Difference between published and recreated results
STNN -0.88% 0.22% 0.00% -1.17% 1.32% 0.00% -0.66% -0.48% 0.12%
STAWnet -0.74% -0.77% 0.14% -1.32% -1.30% -0.97% -1.74% -1.54% -1.43%
Graph WaveNet 0.00% 0.38% 2.03% 0.65% 1.61% 2.39% 1.13% 2.17% 1.89%
Table 3: Published and recreated performance of selected SOTA traffic speed prediction models: PeMS-Bay, test set.
15 min 30 min 60 min
MAE RMSE MAPE MAE RMSE MAPE MAE RMSE MAPE
Published results
STNN 1.20 2.41 2.53% 1.50 3.26 3.33% 1.86 4.22 4.30%
GMAN 1.34 2.82 2.81% 1.62 3.72 3.63% 1.86 4.32 4.31%
STAWnet 1.31 2.78 2.76% 1.62 3.70 3.67% 1.89 4.36 4.47%
Graph WaveNet 1.30 2.74 2.76% 1.63 3.70 3.67% 1.95 4.52 4.63%
STTN 1.36 2.87 2.89% 1.67 3.79 3.78% 1.95 4.50 4.58%
Recreated results
STNN 1.21 2.43 2.51% 1.49 3.23 3.23% 1.87 4.18 4.32%
STAWnet 1.32 2.81 2.77% 1.64 3.75 3.69% 1.95 4.46 4.52%
Graph WaveNet 1.30 2.72 2.71% 1.62 3.66 3.64% 1.93 4.43 4.52%
STNN adjusted 1.41 2.94 2.96% 1.83 4.09 4.25% 2.35 5.27 5.85%
Difference between published and recreated results
STNN -0.83% -0.83% 0.79% 0.67% 0.92% 3.00% -0.54% 0.95% -0.47%
STAWnet -0.76% -1.08% -0.36% -1.24% -1.35% -0.55% -3.18% -2.29% -1.12%
Graph WaveNet 0.00% 0.73% 1.81% 0.61% 1.08% 0.82% 1.03% 1.99% 2.38%
combine predictions: average network speed, recur-
rent congestion across all days, and recurrent conges-
tion excluding weekends. Finally, we demonstrate the
effect of congestion as the prediction horizon is var-
ied.
In Fig. 3 we show the recurrent congestion ob-
served in the METR-LA data set. The first 120 hours
represent the average network speed Monday to Fri-
day and the remaining period represents the weekend.
There is a clear drop in average network speed during
certain intervals of a typical day. These intervals are
also more prominent during weekdays (referred to as
‘work days’ for clarity). These intervals can be de-
scribed as periods of congestion. To select periods of
congestion for analysis, we can use a threshold, such
as the median traffic speed used in Fig. 3, to separate
the congested and not congested data.
To compare model performance during times of
congestion with performance during the absence of
congestion, we set different congestion thresholds
around the median speed measured across all sensors,
computed using the training partition of the METR-
LA and PeMS-Bay datasets. We start with a thresh-
old value that equals the median speed over all sensors
and then vary this threshold, to obtain different divi-
Figure 3: METR-LA training set average network speed per
time of day and day of week, and matching congested inter-
vals.
A Comparative Study of Graph Neural Network Speed Prediction during Periods of Congestion
335

sions of the data set, by adding or subtracting a thresh-
old interval value. We use two different size intervals
for speeds faster and slower than the median thresh-
old, as the data distribution is skewed. The threshold
values that are smaller than the median speed are de-
termined by subtracting multiples of a threshold in-
terval value computed using Eq. 4 from the median
speed, while the thresholds that are larger than the
median speed are calculated by adding multiples of
the interval value calculated using Eq. 5 to the me-
dian speed value.
s
s
=
s
c
− min(s)
10
(4)
s
f
=
max(s) − s
c
10
(5)
In Eq. 4 and 5 s is the average network speed
(across all sensors, per time step), s
c
is the centre
threshold speed (in this case the median), and s
s
and
s
f
are the speed intervals, slower and faster than the
median, respectively.
For our first analysis, we compare the average net-
work speed at each time step in the validation set to
the threshold speed. If the average network speed is
greater than the threshold speed, the network at this
time step is not congested, otherwise, the network
is congested. The prediction MAE during congested
times is then compared to the prediction MAE dur-
ing not congested times across the entire validation
set and the complete traffic network. Fig. 4
depicts the following for Graph WaveNet for dif-
ferent threshold values: the number of observations
that form part of the congested and not congested
data, the average MAE for the 60-minute prediction
horizon for congested and not congested data, and the
difference in MAE between the predictions for con-
gested values and not congested data. From these re-
sults the difference in the performance of the models
for congested data and not congested data is clear.
For our second analysis, we use a fixed daily di-
vision between congested and not congested data by
calculating the average daily speed over all days for
each time of day. The threshold value is then com-
pared with this fixed daily average speed pattern to
differentiate between congested and not congested
observations. As each prediction uses the past hour
of measured speeds, the daily time interval that repre-
sents times of recurrent congestion is chosen as from
the hour before the average daily speed drops below
the threshold until the hour before the average daily
speed goes above the threshold for the last time in the
training dataset. This time interval of data is then ex-
tracted from the dataset as the congested data and the
Figure 4: Graph WaveNet per time-step congestion analy-
sis: METR-LA, validation set.
rest of the data is the not congested data. The perfor-
mance of the model during the congested time inter-
val is then compared to the performance of the model
outside of this interval. For the third analysis we use
the same method as for the second analysis to deter-
mine recurrent daily congestion patterns, but exclude
weekend data.
The result for the three described analyses are
given in Table 4 for the METR-LA dataset and in Ta-
ble 5 for the PeMS-Bay dataset. The median thresh-
old is indicated in bold along with the maximum
MAE differences. By examining the results in Tables
4 and 5 we can see that STNN does not generalise as
well as STAWnet and Graph WaveNet on congested
data since the difference in performance on congested
and not congested data is much larger for STNN than
it is for the other two models. We can also see that, by
excluding weekend data from the recurrent conges-
tion analysis, a bigger difference is obtained in per-
formance on congested and not congested data. This
is because, as can be seen in Fig. 3, weekend data has
a smaller interval of congestion during the day and
the same recurrent congestion interval can therefore
not effectively be used for weekends.
Finally, we consider the interplay between con-
gestion and the prediction horizon. In Fig. 5 we show
the performance of the METR-LA Graph WaveNet
model when categorising congestion data based on
average network speed per time step and using the
median as a threshold. Not only is the model’s per-
formance worse for data above the threshold, but the
performance of the model also becomes worse more
rapidly with increasing prediction horizons. This is a
clear indication of how improving the model’s perfor-
mance during times of congestion would benefit the
model’s traffic prediction capabilities.
NCTA 2022 - 14th International Conference on Neural Computation Theory and Applications
336
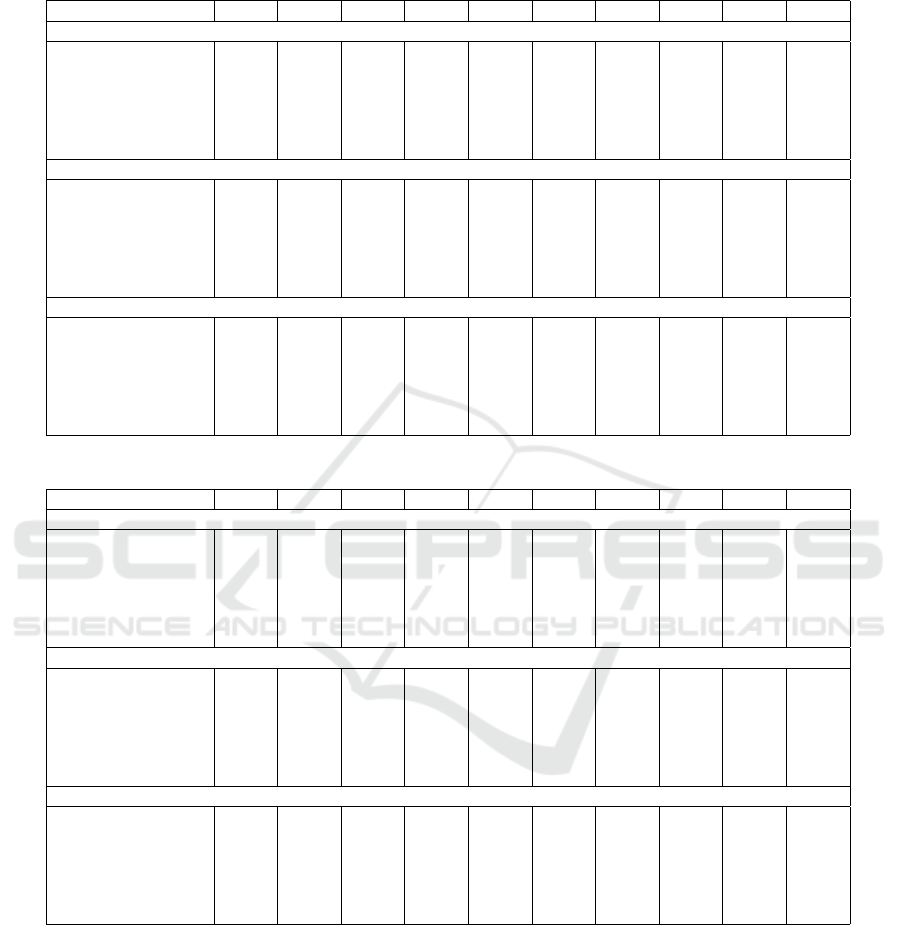
Table 4: Performance of the selected systems when evaluated using the three congestion scenarios: The MAE on congested
data, and the MAE difference when evaluated on congested and not congested data as the congestion threshold is varied.
METR-LA, validation set, 60-min horizon.
Threshold (MPH) 50.97 51.94 52.90 53.86 54.83 57.72 58.22 58.72 59.21 59.71
MAE per time step
GWN congested 5.75 5.68 5.68 5.62 5.52 4.98 4.85 4.76 4.66 4.54
GWN difference 3.07 3.06 3.12 3.13 3.11 2.78 2.69 2.64 2.59 2.52
STNN congested 7.57 7.52 7.46 7.33 7.11 5.99 5.88 5.80 5.70 5.54
STNN difference 4.46 4.47 4.48 4.44 4.31 3.41 3.35 3.31 3.24 3.13
STAWnet congested 5.72 5.66 5.67 5.63 5.52 5.00 4.89 4.80 4.70 4.57
STAWnet difference 2.99 2.98 3.07 3.09 3.06 2.76 2.69 2.63 2.58 2.50
MAE recurrent congestion: all days
GWN congested 4.38 4.40 3.87 3.87 3.87 3.88 3.88 3.55 3.54 3.53
GWN difference 1.34 1.43 1.29 1.36 1.39 1.50 1.51 1.21 1.24 1.25
STNN congested 5.44 5.47 4.45 4.49 4.51 4.55 4.55 4.15 4.13 4.12
STNN difference 1.92 2.04 1.39 1.55 1.61 1.80 1.82 1.45 1.48 1.50
STAWnet congested 4.43 4.43 3.90 3.89 3.89 3.91 3.91 3.59 3.57 3.57
STAWnet difference 1.35 1.41 1.27 1.32 1.35 1.49 1.50 1.18 1.21 1.23
MAE recurrent congestion: work days only
GWN congested 5.05 5.16 4.54 4.55 4.57 4.60 4.60 4.15 4.14 4.13
GWN difference 1.62 1.83 1.74 1.85 1.91 2.11 2.13 1.71 1.76 1.79
STNN congested 6.41 6.51 5.21 5.31 5.35 5.43 5.44 4.88 4.86 4.85
STNN difference 2.39 2.62 1.81 2.08 2.19 2.50 2.53 2.05 2.10 2.14
STAWnet congested 5.10 5.18 4.58 4.60 4.61 4.65 4.65 4.19 4.18 4.17
STAWnet difference 1.62 1.79 1.73 1.84 1.89 2.11 2.13 1.69 1.73 1.76
Table 5: Same analysis as in Table 4 but for the PeMS-Bay task.
Threshold (MPH) 57.42 58.44 59.47 60.49 61.51 62.53 63.55 63.92 64.28 64.64
MAE per time stem
GWN congested 3.70 3.68 3.66 3.62 3.52 3.25 2.90 2.84 2.80 2.76
GWN difference 2.28 2.31 2.34 2.35 2.30 2.12 1.83 1.78 1.75 1.73
STNN congested 5.41 5.39 5.35 5.29 5.12 4.64 4.09 3.99 3.93 3.88
STNN difference 3.64 3.70 3.74 3.75 3.66 3.28 2.81 2.74 2.70 2.67
STAWnet congested 3.76 3.74 3.70 3.66 3.55 3.28 2.93 2.86 2.82 2.78
STAWnet difference 2.34 2.36 2.38 2.37 2.32 2.12 1.83 1.79 1.75 1.73
MAE recurrent congestion all days
GWN congested 2.63 2.66 2.67 2.68 2.68 2.67 2.64 2.63 2.61 2.60
GWN difference 1.24 1.37 1.42 1.49 1.54 1.59 1.60 1.61 1.61 1.61
STNN congested 3.49 3.61 3.63 3.67 3.70 3.71 3.69 3.68 3.65 3.63
STNN difference 1.60 1.90 1.99 2.13 2.28 2.41 2.47 2.48 2.48 2.48
STAWnet congested 2.66 2.70 2.70 2.71 2.71 2.69 2.67 2.66 2.63 2.62
STAWnet difference 1.27 1.40 1.44 1.51 1.56 1.60 1.61 1.62 1.61 1.61
MAE recurrent congestion work days
GWN congested 2.96 3.01 3.03 3.05 3.05 3.04 3.01 3.00 2.98 2.96
GWN difference 1.45 1.62 1.68 1.78 1.85 1.91 1.94 1.95 1.95 1.95
STNN congested 3.99 4.15 4.19 4.24 4.29 4.31 4.29 4.28 4.24 4.22
STNN difference 1.85 2.25 2.37 2.56 2.75 2.93 3.02 3.04 3.04 3.04
STAWnet congested 3.00 3.06 3.07 3.08 3.08 3.07 3.04 3.03 3.00 2.99
STAWnet difference 1.48 1.66 1.71 1.80 1.87 1.93 1.95 1.96 1.95 1.95
5 CONCLUSION
In this paper, we investigated the performance of deep
learning models for traffic speed prediction during pe-
riods of congestion. We found that, while all the
techniques investigated performed similarly in the ab-
sence of congestion, Graph WaveNet and STAWnet
outperformed STNN during periods of congestion. It
was also found that a longer prediction horizon had a
large effect on performance during periods of conges-
tion, and a surprisingly limited effect otherwise. An
increased understanding of model behaviour during
congestion should assist future efforts to optimise a
model for periods of recurrent congestion, which will
improve route-finding algorithms during times of the
day when fastest path-finding technologies are most
necessary. An increase in a model’s ability to accu-
rately predict traffic during recurrent congestion will
A Comparative Study of Graph Neural Network Speed Prediction during Periods of Congestion
337
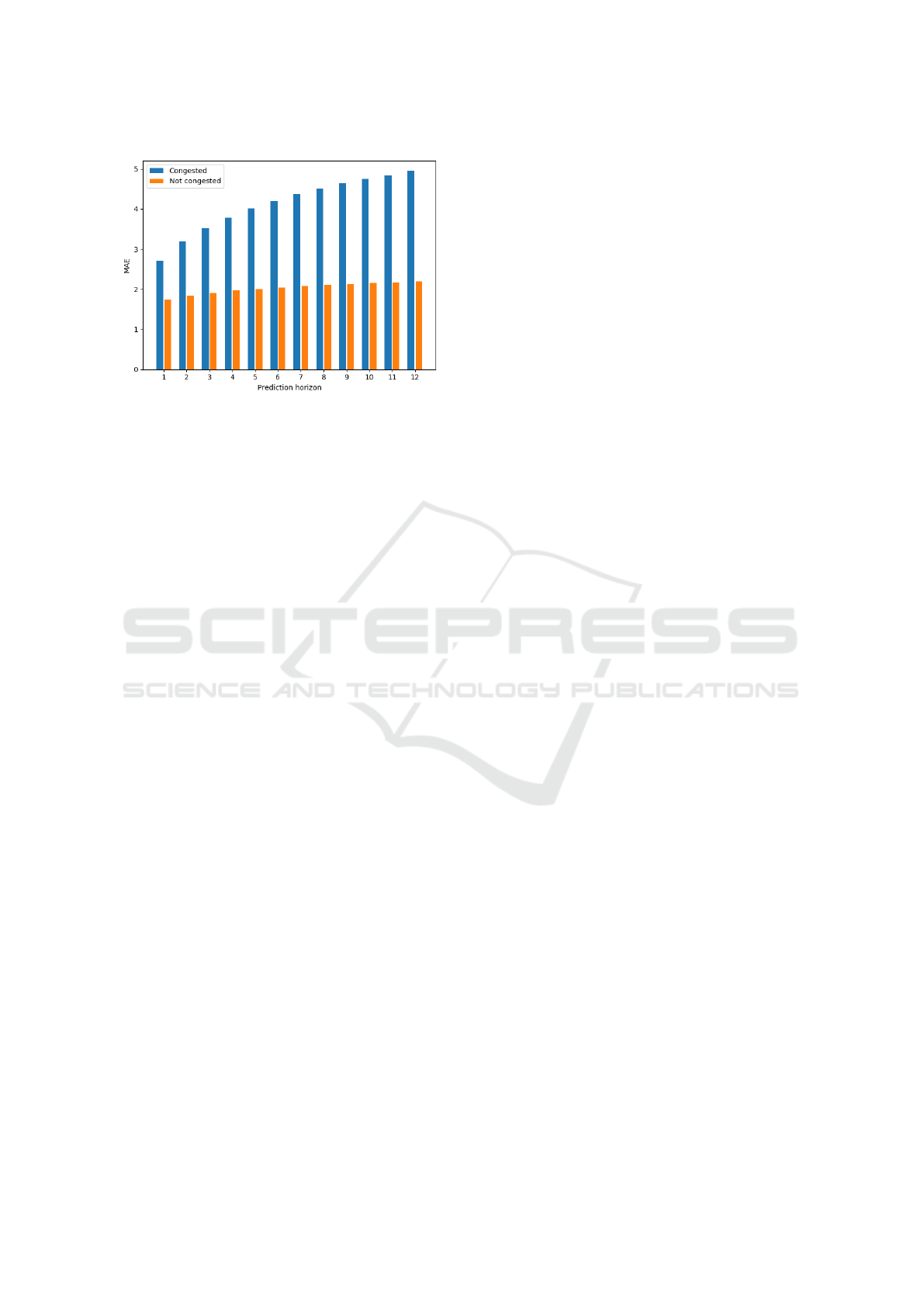
Figure 5: Graph WaveNet per time-step performance on
METR-LA dataset for data above and below the median
congestion threshold for twelve prediction horizons.
most likely also increase its performance during non-
recurrent congestion events such as traffic accidents.
Future work will focus on improving prediction
performance during periods of congestion. To opti-
mise a traffic speed prediction model’s performance
during times of congestion, segments of the day that
represent recurrent congestion can be extracted and
used to train the model and congestion data can also
be repeated within the training set. The loss function
of the model can also be modified to give preference
to congestion data during training. This will be ex-
plored in future work.
REFERENCES
Akhtar, M. and Moridpour, S. (2021). A review of traf-
fic congestion prediction using artificial intelligence.
Journal of Advanced Transportation, 2021:1–18.
Chikaraishi, M., Garg, P., Varghese, V., Yoshizoe, K., Urata,
J., Shiomi, Y., and Watanabe, R. (2020). On the pos-
sibility of short-term traffic prediction during disas-
ter with machine learning approaches: An exploratory
analysis. Transport Policy, 98:91–104.
Gandhi, M. M., Solanki, D. S., Daptardar, R. S., and
Baloorkar, N. S. (2020). Smart control of traffic light
using artificial intelligence. In Proc. IEEE Int. Conf.
on Recent Advances and Innovations in Engineering
(ICRAIE), pages 1–6.
Gunawan, F. E. and Chandra, F. Y. (2014). Optimal averag-
ing time for predicting traffic velocity using floating
car data technique for advanced traveler information
system. Procedia - Social and Behavioral Sciences,
138:566–575. The 9th Int. Conf. on Traffic and Trans-
portation Studies (ICTTS).
Jiang, Z., Guo, F., Qian, Y., Wang, Y., and Pan, W. D.
(2021). A deep learning-assisted mathematical model
for decongestion time prediction at railroad grade
crossings. Neural Computing and Applications, page
4715–4732.
Li, Y., Yu, R., Shahabi, C., and Liu, Y. (2018). Diffusion
convolutional recurrent neural network: Data-driven
traffic forecasting. In Int. Conf. on Learning Repre-
sentations.
Mallick, T., Balaprakash, P., Rask, E., and Macfarlane,
J. (2020). Transfer learning with graph neural net-
works for short-term highway traffic forecasting. In
Proc. Int. Conf. on Pattern Recognition (ICPR), pages
10367–10374.
Mena-Oreja, J. and Gozalvez, J. (2020). A comprehensive
evaluation of deep learning-based techniques for traf-
fic prediction. IEEE Access, 8:91188–91212.
Mohanty, S. (2018). A Deep Learning, Model-Predictive
Approach to Neighborhood Congestion Prediction
and Control. PhD thesis, Berkeley University of Cal-
ifornia.
Nagy, A. M. and Simon, V. (2018). Survey on traffic predic-
tion in smart cities. Pervasive and Mobile Computing,
50:148–163.
Polson, N. G. and Sokolov, V. O. (2017). Deep learning
for short-term traffic flow prediction. Transportation
Research Part C: Emerging Technologies, 79:1–17.
Shi, G., Shan, J., Ding, L., Ye, P., Li, Y., and Jiang, N.
(2019). Urban road network expansion and its driving
variables: A case study of Nanjing City. Int. Jour-
nal of Environmental Research and Public Health,
16:2318–2334.
Tian, C. and Chan, W. K. V. (2021). Spatial-temporal atten-
tion wavenet: A deep learning framework for traffic
prediction considering spatial-temporal dependencies.
IET Intelligent Transport Systems, 15:549–561.
Wu, Z., Pan, S., Long, G., Jiang, J., and Zhang, C. (2019).
Graph WaveNet for deep spatial-temporal graph mod-
eling. In Proc. of the 28th Int. Joint Conf. on AI,
IJCAI-19, pages 1907–1913.
Xu, J., Zhang, Y., and Xing, C. (2018). An effective selec-
tion method for vehicle alternative route under traf-
fic congestion. In Proc. Int. Conf. on Communication
Technology (ICCT), pages 494–499.
Xu, M., Dai, W., Liu, C., Gao, X., Lin, W., Qi, G.-
J., and Xiong, H. (2020). Spatial-temporal trans-
former networks for traffic flow forecasting. ArXiv,
abs/2001.02908.
Yang, S., Liu, J., and Zhao, K. (2021). Space meets time:
Local spacetime neural network for traffic flow fore-
casting. In Proc. IEEE Int. Conf. on Data Mining
(ICDM), pages 817–826.
Zheng, C., Fan, X., Wang, C., and Qi, J. (2020). GMAN: A
graph multi-attention network for traffic prediction. In
Proc. AAAI Conf. on AI, volume 34, page 1234–1241.
Zhou, L., Zhang, S., Yu, J., and Chen, X. (2020).
Spatial–temporal deep tensor neural networks for
large-scale urban network speed prediction. IEEE
Transactions on Intelligent Transportation Systems,
21(9):3718–3729.
ˇ
Zliobait
˙
e, I. and Khokhlov, M. (2016). Optimal estimates
for short horizon travel time prediction in urban areas.
Intelligent Data Analysis, 20(6):1459–1475.
NCTA 2022 - 14th International Conference on Neural Computation Theory and Applications
338
