
A BCI-controlled Robot Assistant for Navigation and Object
Manipulation in a VR Smart Home Environment
Ethel Pruss, Jos Prinsen, Anita Vrins, Caterina Ceccato and Maryam Alimardani
a
Department of Cognitive Science and AI, Tilburg University, Tilburg, The Netherlands
Keywords:
Smart Home, Brain-Computer Interface (BCI), Virtual Reality (VR), Assistive Robots, P300 Paradigm.
Abstract:
BCI-controlled smart homes enable people with severe motor disabilities to perform household activities,
which would otherwise be inaccessible to them. In this paper, we present a proof of concept of an assistive
robot with telepresence functionality inside a Virtual Reality (VR) smart home. Using live EEG data and a
P300 Brain-Computer Interface (BCI), the user is able to control a virtual agent and interact with the smart
home environment. We further discuss the potential use cases of our proposed system for patients with motor
impairment and recommend directions for future research.
1 INTRODUCTION
Brain-computer interfaces (BCI) are communication
systems that get their input from brain activity and
translate them into output commands for external de-
vices without requiring the user to move physically
(Wolpaw et al., 2002). Therefore, BCIs can help
patients with motor impairment to regain the abil-
ity to communicate and interact with their environ-
ment through various control paradigms. There are
different methods to collect a user’s brain activity,
among which electroencephalography (EEG) is the
most popular as it is non-invasive and offers a high
temporal resolution (Abiri et al., 2019).
Depending on the EEG component extracted from
the brain, a BCI system can be classified into three
major paradigms; P300, steady-state visual evoked
potential (SSVEP), and motor imagery (Abiri et al.,
2019). The P300 paradigm relies on positive deflec-
tions in form of an event-related potential (ERP) that
are elicited approximately 300 ms after encountering
an intended stimulus in an oddball paradigm (Mat-
tout et al., 2015). Therefore, by comparing the event-
related potentials induced in a sequence of stimuli
presentation, P300 BCIs can identify a user’s choice
of target. The P300 paradigm requires less user train-
ing than other paradigms (Guger et al., 2009), making
it a promising tool for the design of BCI-controlled
interactive environments (Fazel-Rezai et al., 2012).
BCI-controlled smart homes have been studied us-
ing both virtual reality (VR) simulations and physical
a
https://orcid.org/0000-0003-3077-7657
prototypes, which are often limited to a single appli-
ance or function (Edlinger and Guger, 2011; Edlinger
et al., 2009; Sahal et al., 2021). A limitation of pre-
vious BCI smart home studies is that they have only
focused on simple tasks that can be accomplished by
sending digital commands to smart devices. For in-
stance, Edlinger and Guger (2011) presented an ex-
periment involving smart home control inside a vir-
tual environment using a modified P300 speller that
allowed the user to control lights, turn the TV on or
off, select TV channels and adjust the volume. A
more recent study by Sahal et al. (2021) used aug-
mented reality (AR) combined with a limited proto-
type to accomplish similar tasks by utilizing the in-
built capabilities of a smart assistant (Google Assis-
tant).
Although these setups can give patients control
over their entertainment systems and ambiance, they
do not address the most basic needs of immobile pa-
tients; e.g. retrieving a glass of water, medication, or
food. The missing component is the ability to move
and manipulate objects. Combining a BCI-controlled
environment with a robot that could facilitate physi-
cal tasks, such as object retrieval, could address these
needs.
1.1 Robot-assisted Smart Environments
A number of past studies have attempted combin-
ing robot assistants with smart home applications (Do
et al., 2018; Wilson et al., 2019). These studies are
primarily focused on elderly healthcare to improve in-
Pruss, E., Prinsen, J., Vrins, A., Ceccato, C. and Alimardani, M.
A BCI-controlled Robot Assistant for Navigation and Object Manipulation in a VR Smart Home Environment.
DOI: 10.5220/0011010800003123
In Proceedings of the 15th International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2022) - Volume 1: BIODEVICES, pages 231-237
ISBN: 978-989-758-552-4; ISSN: 2184-4305
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
231

dependent living. For instance, Koceski and Koceska
(2016) developed a telepresence robot that was able
to drive around and use an extendable arm to grab
and fetch small objects. Additionally, the head of the
robot was equipped with a tablet that included an inte-
grated camera. This had two benefits: a live stream of
the robot’s location was provided to the users so that
it could be operated even when out of sight, and the
user was able to create a two-way video call, which al-
lowed them to connect with caregivers, relatives, and
friends. Participants reported their perceived ‘func-
tionality usefulness’ of the robot on a five-point Lik-
ert scale. Importantly, both navigation and the ma-
nipulator functions achieved scores of 3.0 and higher,
indicating high user acceptance.
Other studies have shown that telepresence robots
can help patients who are limited in their interactions
with the outside world feel more socially connected,
which could alleviate or prevent psychological prob-
lems stemming from loneliness and isolation (Hung
et al., 2021; Moyle et al., 2017; Niemel
¨
a et al., 2021;
Odekerken-Schr
¨
oder et al., 2020; Wiese et al., 2017).
For instance, Niemel
¨
a et al. (2021) conducted field tri-
als with a duration of 6-12 weeks to study the effect of
telepresence robots in elderly care facilities. The au-
thors found that telepresence robots made the patients
feel as if their family members were present, which
had a positive effect on their social well-being. An-
other study addressing loneliness and isolation dur-
ing the COVID-19 pandemic by Odekerken-Schr
¨
oder
et al. (2020) found that in addition to facilitating so-
cial ties between humans, the robot itself can be per-
ceived as a social companion that plays the role of
a personal assistant, a relational peer, or an intimate
buddy. A similar effect was observed using a compan-
ion robot for dementia patients in Hung et al. (2021),
where the robot was perceived as a buddy that facili-
tated social connection and mitigated feelings of lone-
liness.
While the above-mentioned studies highlight the
potential of robot-assisted environments for many
user groups, they are often focused on able-bodied pa-
tients who can interact with the robot through speech
or a handheld device such as a phone or tablet. As
these input devices require motor control, patients
with motor impairment would not be able to use
the systems. For some patients with motor impair-
ment, gaze control or voice control are alternative op-
tions. Tele-operated robots that are controlled by eye-
tracking have been used in studies with a view of as-
sisting disabled patients (Watson et al., 2016; Zhang
and Hansen, 2020), and similarly, voice control has
been used as an additional control option for a smart
home prototype (Luria et al., 2017). However, there
are severe cases of motor impairment where neither
speech nor gaze control is possible. Patients who suf-
fer from locked-in syndrome, e.g., amyotrophic lat-
eral sclerosis (ALS) patients, are unable to use any
traditional input methods. For these patients who can
not communicate through any physical medium, BCI
systems are the only means that would enable them
to express their needs or gain control over assistive
devices that could reduce their reliance on caretakers
(Wolpaw et al., 2002).
For instance, in the study of Spataro et al. (2017)
focusing on ALS patients with locked-in syndrome,
a P300-based BCI was used to control the humanoid
NAO robot. The authors found that a majority of the
patients were able to control the robot successfully
to fetch a glass of water. This suggests that a robot-
assisted smart home environment could be a possible
solution for increasing independence and quality of
life for ALS patients. However, the NAO robot used
in this study is a small size robot not capable of navi-
gation. Therefore the water-fetching capabilities were
tested either on a fixed office desk or a wooden board
laid over a bed, neither of which would be a realis-
tic scenario for a bed-bound patient (Spataro et al.,
2017).
In this study, we demonstrate a proof of concept
for a P300 BCI-controlled assistive robot in a vir-
tual smart home. Specifically, we will focus on com-
plex tasks that are needed for independent living but
cannot be accomplished without object manipulation.
A VR environment is used to simulate an IoT-based
smart home, which can be controlled directly for sim-
ple tasks such as controlling lights. A virtual robot in
the same environment facilitates complex tasks, such
as object retrieval, once such intention is decoded
from the user’s brain activity. VR provides a feasi-
ble platform for rapid prototyping and user evalua-
tion as opposed to physical smart home environments
that are costly and laborious to create (Holzner et al.,
2009). By combining a BCI system with a robot-
assisted smart home, our proposed system illustrates a
proof of concept for future smart homes that can sig-
nificantly increase the independence and life quality
of patients who are immobile or experience reduced
mobility.
2 SYSTEM DESIGN
2.1 Virtual Reality Simulation
The VR smart home environment was developed
in Unity, which is a widely used cross-platform
game engine. We used an add-on called SteamVR,
BIODEVICES 2022 - 15th International Conference on Biomedical Electronics and Devices
232

Figure 1: (a) VR simulation of the smart home environment
and (b) Virtual robot assistant
which is compatible with nearly all head-mounted
displays (HMD). The HMD employed in this study
was an Oculus Quest 2. The environment consists of
one room with kitchen appliances, lights, and basic
kitchen furniture (Figure 1). The 3D assets used in
our environment are, except for the kettle and toaster,
from the Unity Asset Store (Demon, 2020; Q! Dev,
2018; Rubens, 2017; Studio, 2021). We developed the
remaining assets using Blender. The environment can
be viewed either from the third-person perspective of
the room or as a moving first-person perspective that
follows the robot, depending on the user’s preference.
The appliances in the VR room were designed to
provide the user with affordances for the actions they
can take. During interaction, a custom-designed con-
troller board is displayed at the corner of the view-
field in the HMD, which gives possibilities for five
navigation and four object manipulation commands
Figure 2: Custom-designed P300 controller board for a
robot-assisted smart home environment.The arrows and
stop icon are for direct user-controlled robot navigation.
The remaining four icons give high-level commands for the
robot and smart home environment (e.g. make toast, switch
on/off the lights, make tea and clean up trash).
(see Figure 2). The navigation commands allow the
user to directly control the movement of the robot in
four directions and subsequently halt the movement.
The icons with household items (toaster, kettle, light
bulb, and trash can) give high-level commands that
initiate action sequences for four tasks: making toast,
turning the kettle on, turning the light on, and clean-
ing up. The commands include both simple tasks
that can be achieved without robot assistance by com-
municating directly with the smart home appliances
(e.g. switching on the lights), and complex tasks that
require interaction between the robot and the smart
home (e.g. making toast, which requires the robot
to insert bread into the toaster and deliver the toast
to the user). Additionally, the cleaning up task in-
volves shared control from the user to avoid potential
issues around misidentification of disposable items:
when the cleaning mode is initiated, the robot can be
moved around by the user to locate items that need
to be taken to the trash can by the robot (outside of
cleaning mode the robot would not dispose of items).
The VR environment is responsive to the user’s
choices, giving visual and auditory feedback once
their selected action is successfully recognized and
carried out. Specifically, a toaster selection is fol-
lowed by a toast coming out of the toaster, the ket-
tle displays a smoke animation, the light bulb icon
switches on the virtual lamps increasing the lumi-
nance of the room, and the trash can icon triggers a
cleaning animation carried out by the robot assistant.
2.2 P300 BCI
Brain activity is recorded using the Unicorn Hybrid
Black system (g.tec neurotechnology GmbH, Aus-
tria), which is a wireless EEG cap (Fig. 3a). The
signals are collected from 8 channels according to the
10-20 international system (Fz, C3, Cz, C4, Pz, PO7,
Oz, and PO8). The channel positions are visualized
in Fig. 3b. The ground and reference electrodes are
placed on the mastoids of the subject using dispos-
able adhesive surface electrodes. To inspect the EEG
signals and extract P300 potentials, we used the Uni-
corn Suite software. This software includes Unicorn
Recorder and Unicorn Speller; the former is used to
check the quality of the signals and the latter is used
for the P300 paradigm.
The Unicorn Speller runs on MATLAB Simulink
and includes three main modules; signal acquisition
and processing, feature extraction, and classification
(Fig. 4) (Guger et al., 2009). The Speller graphical
user interface (based on which the controller board
was designed, Fig. 2) contains rows and columns of
stimuli that flash at a certain frequency. The user is
A BCI-controlled Robot Assistant for Navigation and Object Manipulation in a VR Smart Home Environment
233

Figure 3: (A) Unicorn Hybrid Black system, (B) electrode
positions for the P300 BCI interface.
asked to focus on one item and count the number of
times it flashes while ignoring other items. Every time
the target item flashes, a P300 response is generated
and reflected in EEG signals. By comparing the tim-
ing of the P300 response in the recorded signals and
the flashing sequences provided by the interface, the
system can identify the target item that was chosen by
the user.
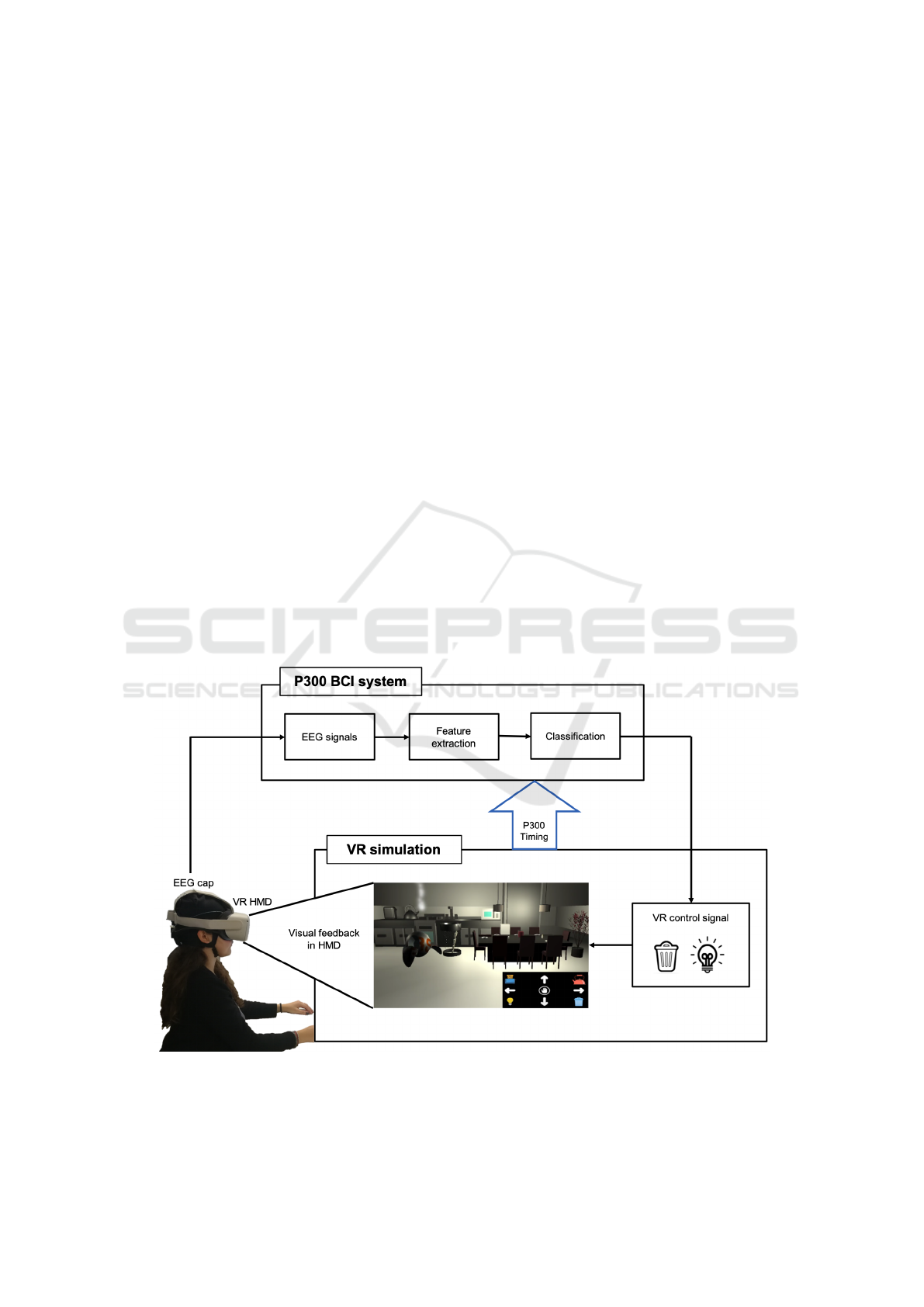
2.3 System Architecture
The general architecture of the solution consists of
two components; the VR smart home and the P300
BCI system. The two are connected using the P300
controller board (Fig. 2) which provides visual cues
to the user. The controller board presents a 3 by 3
table of options, enabling both navigation and object
manipulation commands for the assistive robot.
Using the hardware mentioned above, we created
a BCI-VR loop (Fig. 4) whereby the user’s brain
activity is recorded by the EEG cap as they observe
the VR environment in a HMD. The P300 controller
board is presented as a second display at the bottom
corner of the visual field in the HMD. The P300 BCI
system controls the flashing sequence of the icons on
the controller board. The flashes last 150 ms, with
no delay between them. The user is instructed to
choose their command of choice by focusing on the
representing icon on this board and silently count the
number of flashes. The BCI system would then match
the timing of the flashing with the P300 responses in
the brain to predict the user’s chosen command. The
command recognized by the BCI system is then trans-
lated into a control signal for the VR environment
(e.g. switch on the lamp), following which the user
receives visual feedback for their chosen action in the
HMD.
3 DISCUSSION
The current study proposed a proof of concept for
a BCI-controlled smart home in VR that was medi-
ated by a telepresence robot. The system architec-
ture proposed in this study followed the shared con-
trol paradigm as suggested by Koceski and Koceska
(2016), which allows the user to give the robot com-
mands on a high level, such as moving in a particular
direction or grabbing an object, while the lower-level
tasks needed to accomplish the goal are performed au-
tomatically by the robot. Assigning tasks to the robot
on a high level is assumed to be more feasible for a
user with motor impairment compared to having con-
trol over low-level movements needed to complete the
task. This should keep the training time required to
use the system relatively low while still giving the
user a sense of control.
The integration of a telepresence robot with a
BCI-controlled smart home offers several advantages
to immobile patients. It emulates the ability to
move around in an environment when walking or
wheelchair operation is no longer feasible. Addition-
ally, it can increase perceived social presence through
communicating with caregivers or loved ones who
are physically out of reach (Koceski and Koceska,
2016; Moyle et al., 2019; Niemel
¨
a et al., 2021). Fur-
thermore, the sense of agency and embodiment asso-
ciated with BCI-controlled telepresence robots have
been previously shown to increase user performance
on the BCI task and hence the quality of interaction
with the system (Alimardani et al., 2013). For this ef-
fect, a first-person view of the environment streamed
by the robot is essential. In our current VR design,
either first-person view or third-person view can be
manually chosen at the beginning of the interaction.
In future prototypes, a BCI toggle could be added to
enable the user to change the view dynamically.
Usually, telepresence robots are equipped with a
camera mounted to the robot, providing a first-person
view of the environment to the user. The use of a
VR environment has some advantages over traditional
telepresence interfaces as the incoming video stream
from the robot can be displayed in an HMD instead of
a screen or tablet. In terms of user comfort, an HMD
can show the video feed and the P300 controller re-
gardless of the user’s head orientation, which makes
smart-home environments more accessible to patients
who find sitting upright difficult. This is especially
relevant for ALS patients, as sitting up to look at a
screen can cause fatigue and discomfort (Sahal et al.,
2021). Another benefit of using a VR simulation is
that an entire smart home environment, including in-
teractions with appliances and visual feedback, can
BIODEVICES 2022 - 15th International Conference on Biomedical Electronics and Devices
234
be simulated in a life-like manner without the need
for any additional technology or development. This
allows rapid prototyping, user evaluation, and cus-
tomization at a low cost (Holzner et al., 2009), which
is important because the success of a smart home sys-
tem depends on its ability to meet user needs.
While BCI-driven robot-assisted smart homes
show promise in a lab setting, more work is needed
to establish their application in a real-life situation for
disabled patients. One of the main limitations of the
current prototype (and P300 BCIs in general) is the
trade-off that exists between the system’s classifica-
tion speed and its accuracy. The number of flash se-
quences needed for the P300 controller to accurately
isolate the intended command limits how fast the sys-
tem can respond. Our pilot study with one trained
user showed that 5 flashes are sufficient for the system
to accurately identify the target commands. Improv-
ing speed while maintaining accuracy is particularly
important for robot navigation and control, as slow
response times could make the robot inefficient and
prone to accidents. A previous study using a similar
setup with a VR headset and the visual P300 paradigm
demonstrated that healthy users can reach an average
accuracy of 96% with three flash sequences and that
depending on the user, spelling with only one flash
sequence is possible (K
¨
athner et al., 2015). Such po-
tentially high information transfer rate in P300 BCIs
is promising for robot navigation and control in real
time, however further user evaluation is needed to
confirm this expectation using our proposed proto-
type.
It is particularly important to test the robot func-
tionalities in a physical environment where enhanced
navigation and obstacle avoidance are necessary. Ad-
ditionally, potential end-users should be included as
early as possible in the development process in a user-
centered design approach to ensure that the developed
functionalities are in line with what disabled users and
their caretakers find comfortable and useful (Rogers
et al., 2021). Previous research indicates that 84%
of ALS patients would be interested in using BCI as-
sistive technology with a non-invasive electrode cap
(Huggins et al., 2011). Other surveys attempted to
determine the BCI functionalities that would benefit
patients the most (Huggins et al., 2011; Olsson et al.,
2010). However, as these studies were not geared to-
wards smart homes, further user evaluations are re-
quired to identify the limitations of the proposed so-
lution before it is used in practice.
Future studies should outline the possible func-
tionalities of a robot-assisted smart home based
on user needs and priorities e.g., by conducting a
survey similar to Huggins et al. Huggins et al.
(2011). Additionally, simultaneous decoding of mul-
tiple EEG features through Hybrid BCI methods or
Figure 4: System architecture. The user is instructed to selectively look at one of the blinking icons in the P300 controller
board presented at the bottom corner of the VR visual field. The BCI system then predicts the user’s selected command based
on the P300 response in the EEG signals and subsequently sends a control signal to the VR simulation. This activates the
corresponding appliance or the robot in the VR environment, which serves as visual feedback to the user.
A BCI-controlled Robot Assistant for Navigation and Object Manipulation in a VR Smart Home Environment
235

novel BCI paradigms such as inner speech classifica-
tion (van den Berg et al., 2021) could be employed
to increase the system accuracy, number of the con-
trol commands, and ease of use for the user (Hong
and Khan, 2017). For instance, the motor imagery
paradigm can be integrated as a more intuitive method
for navigation (Su et al., 2011) or the P300 paradigm
can be paired with gaze or attention tracking as an
on/off switch for active/passive control of the inter-
face (Alimardani and Hiraki, 2020). Such a multi-
modal interface will enable asynchronous communi-
cation with the BCI system whenever the user intends
to interact with the environment, which would in re-
turn reduce visual strain from the continuous flashing
of the stimuli.
In sum, robot-assisted smart home systems that
focus on the needs of disabled patients could improve
their quality of life and reduce their reliance on care-
takers, which is beneficial in both healthcare and pri-
vate home care settings. A VR simulation allows re-
searchers to fully consider all aspects of the user expe-
rience before committing to development phases and
to ensure that the potential user groups can benefit
from the system in the long term. While more user
research, prototyping, and testing are still needed, our
application demonstrates the first steps of this process
as a proof of concept.
4 CONCLUSION
In this paper, we presented a proof of concept for a
BCI-controlled robot assistant in a VR-based smart
home that enables patients with motor impairment
to conduct complex tasks such as object manipu-
lation and environment control. Our solution in-
tegrated a VR environment with a P300 BCI sys-
tem through a custom-designed controller interface;
it demonstrated that BCI commands issued via a
custom-designed household-oriented P300 interface
can be sufficient to control a combination of smart
home appliances and an assistive robot. This com-
bination serves as an affordable platform for evalua-
tion and design of real smart home environments for
disabled patients. Further developments in BCI hard-
ware/software, robotics, and VR input methods are
required to realize automated assisted living systems
efficiently.
REFERENCES
Abiri, R., Borhani, S., Sellers, E. W., Jiang, Y., and Zhao, X.
(2019). A comprehensive review of eeg-based brain-
computer interface paradigms. Journal of neural en-
gineering, 16.
Alimardani, M. and Hiraki, K. (2020). Passive brain-
computer interfaces for enhanced human-robot inter-
action. Frontiers in Robotics and AI, 7.
Alimardani, M., Nishio, S., and Ishiguro, H. (2013).
Humanlike robot hands controlled by brain activity
arouse illusion of ownership in operators. Scientific
reports, 3:2396.
Demon, R. (2020). Robot sphere. https://assetstore.unity.
com/packages/3d/characters/robots/robot-sphere-
136226.
Do, H. M., Pham, M., Sheng, W., Yang, D., and Liu,
M. (2018). Rish: A robot-integrated smart home
for elderly care. Robotics and Autonomous Systems,
101:74–92.
Edlinger, G. and Guger, C. (2011). Social environments,
mixed communication and goal-oriented control ap-
plication using a brain-computer interface.
Edlinger, G., Holzner, C., Groenegress, C., Guger, C.,
and Slater, M. (2009). Goal-oriented control with
brain-computer interface. Lecture Notes in Computer
Science (including subseries Lecture Notes in Artifi-
cial Intelligence and Lecture Notes in Bioinformatics),
5638 LNAI:732–740.
Fazel-Rezai, R., Allison, B. Z., Guger, C., Sellers, E. W.,
Kleih, S. C., and K
¨
ubler, A. (2012). P300 brain
computer interface: Current challenges and emerging
trends. Frontiers in Neuroengineering, 0:1–30.
Guger, C., Daban, S., Sellers, E., Holzner, C., Krausz,
G., Carabalona, R., Gramatica, F., and Edlinger, G.
(2009). How many people are able to control a p300-
based brain-computer interface (bci)? Neuroscience
Letters, 462:94–98.
Holzner, C., Guger, C., Edlinger, G., Gronegress, C., and
Slater, M. (2009). Virtual smart home controlled by
thoughts. 2009 18th IEEE International Workshops
on Enabling Technologies: Infrastructures for Collab-
orative Enterprises, pages 236–239.
Hong, K.-S. and Khan, M. J. (2017). Hybrid
brain–computer interface techniques for improved
classification accuracy and increased number of com-
mands: a review. Frontiers in neurorobotics, 11:35.
Huggins, J. E., Wren, P. A., and Gruis, K. L. (2011). What
would brain-computer interface users want? opinions
and priorities of potential users with amyotrophic lat-
eral sclerosis. Amyotrophic Lateral Sclerosis, 12:318–
324.
Hung, L., Gregorio, M., Mann, J., Wallsworth, C., Horne,
N., Berndt, A., Liu, C., Woldum, E., Au-Yeung, A.,
and Chaudhury, H. (2021). Exploring the perceptions
of people with dementia about the social robot paro in
a hospital setting. Dementia, 20.
Koceski, S. and Koceska, N. (2016). Evaluation of an assis-
tive telepresence robot for elderly healthcare. Journal
of Medical Systems, 40:121.
K
¨
athner, I., K
¨
ubler, A., and Halder, S. (2015). Rapid p300
brain-computer interface communication with a head-
mounted display. Frontiers in Neuroscience, 9.
BIODEVICES 2022 - 15th International Conference on Biomedical Electronics and Devices
236

Luria, M., Hoffman, G., and Zuckerman, O. (2017). Com-
paring social robot, screen and voice interfaces for
smart-home control. Proceedings of the 2017 CHI
Conference on Human Factors in Computing Systems,
pages 580–628.
Mattout, J., Perrin, M., Bertrand, O., and Maby, E. (2015).
Improving bci performance through co-adaptation:
Applications to the p300-speller. Annals of Physical
and Rehabilitation Medicine, 58:23–28.
Moyle, W., Arnautovska, U., Ownsworth, T., and Jones, C.
(2017). Potential of telepresence robots to enhance so-
cial connectedness in older adults with dementia: An
integrative review of feasibility.
Moyle, W., Jones, C., Dwan, T., Ownsworth, T., and Sung,
B. (2019). Using telepresence for social connec-
tion: views of older people with dementia, families,
and health professionals from a mixed methods pilot
study. Aging and Mental Health, 23:1643–1650.
Niemel
¨
a, M., van Aerschot, L., Tammela, A., Aaltonen, I.,
and Lammi, H. (2021). Towards ethical guidelines of
using telepresence robots in residential care. Interna-
tional Journal of Social Robotics, 13:431–439.
Odekerken-Schr
¨
oder, G., Mele, C., Russo-Spena, T., Mahr,
D., and Ruggiero, A. (2020). Mitigating loneli-
ness with companion robots in the covid-19 pandemic
and beyond: an integrative framework and research
agenda. Journal of Service Management, 31:1149–
1162.
Olsson, A. G., Markhede, I., Strang, S., and Persson, L. I.
(2010). Differences in quality of life modalities give
rise to needs of individual support in patients with als
and their next of kin. Palliative & Supportive Care,
8:75–82.
Q! Dev (2018). Too many items: Kitchen props.
https://assetstore.unity.com/packages/3d/props/too-
many-items-kitchen-props-127635.
Rogers, W., Kadylak, T., and Bayles, M. (2021). Max-
imizing the benefits of participatory design for hu-
man–robot interaction research with older adults. Hu-
man Factors.
Rubens, R. (2017). Trash bin. https://assetstore.unity.com/
packages/3d/props/furniture/trash-bin-96670.
Sahal, M., Dryden, E., Halac, M., Feldman, S., Heiman-
Patterson, T., and Ayaz, H. (2021). Augmented real-
ity integrated brain computer interface for smart home
control. International Conference on Applied Human
Factors and Ergonomics, pages 89–97.
Spataro, R., Chella, A., Allison, B., Giardina, M., Sorbello,
R., Tramonte, S., Guger, C., and Bella, V. L. (2017).
Reaching and grasping a glass of water by locked-in
als patients through a bci-controlled humanoid robot.
Frontiers in Human Neuroscience, 11.
Studio, A. (2021). Polygon dining room. https://assetstore.
unity.com/packages/3d/props/interior/polygon-
dining-room-199435.
Su, Y., Qi, Y., Luo, J. X., Wu, B., Yang, F., Li, Y., Zhuang,
Y. T., Zheng, X. X., and Chen, W. D. (2011). A hy-
brid brain-computer interface control strategy in a vir-
tual environment. Journal of Zhejiang University SCI-
ENCE C 2011 12:5, 12:351–361.
van den Berg, B., van Donkelaar, S., and Alimardani, M.
(2021). Inner speech classification using eeg sig-
nals: A deep learning approach. 2021 IEEE 2nd In-
ternational Conference on Human-Machine Systems
(ICHMS), pages 1–4.
Watson, G. S., Papelis, Y. E., and Hicks, K. C. (2016).
Simulation-based environment for the eye-tracking
control of tele-operated mobile robots.
Wiese, E., Metta, G., and Wykowska, A. (2017). Robots as
intentional agents: Using neuroscientific methods to
make robots appear more social.
Wilson, G., Pereyda, C., Raghunath, N., de la Cruz,
G., Goel, S., Nesaei, S., Minor, B., Schmitter-
Edgecombe, M., Taylor, M. E., and Cook, D. J.
(2019). Robot-enabled support of daily activities in
smart home environments. Cognitive Systems Re-
search, 54:258–272.
Wolpaw, J. R., Birbaumer, N., McFarland, D. J.,
Pfurtscheller, G., and Vaughan, T. M. (2002).
Brain–computer interfaces for communication and
control. Clinical Neurophysiology, 113:767–791.
Zhang, G. and Hansen, J. P. (2020). People with motor
disabilities using gaze to control telerobots. Extended
Abstracts of the 2020 CHI Conference on Human Fac-
tors in Computing Systems.
A BCI-controlled Robot Assistant for Navigation and Object Manipulation in a VR Smart Home Environment
237
