
Study of LiDAR Segmentation and Model’s Uncertainty using
Transformer for Different Pre-trainings
∗
Mohammed Hassoubah
1,2
, Ibrahim Sobh
1
and Mohamed Elhelw
2
1
Valeo, Egypt
2
Center for Informatics Science, Nile University, Egypt
Keywords:
Epistemic Uncertainty, LiDAR, Self-supervision Training, Semantic Segmentation, Transformer.
Abstract:
For the task of semantic segmentation of 2D or 3D inputs, Transformer architecture suffers limitation in
the ability of localization because of lacking low-level details. Also for the Transformer to function well,
it has to be pre-trained first. Still pre-training the Transformer is an open area of research. In this work,
Transformer is integrated into the U-Net architecture as (Chen et al., 2021). The new architecture is trained to
conduct semantic segmentation of 2D spherical images generated from projecting the 3D LiDAR point cloud.
Such integration allows capturing the the local dependencies from CNN backbone processing of the input,
followed by Transformer processing to capture the long range dependencies. To define the best pre-training
settings, multiple ablations have been executed to the network architecture, the self-training loss function and
self-training procedure, and results are observed. It’s proved that, the integrated architecture and self-training
improve the mIoU by +1.75% over U-Net architecture only, even with self-training it too. Corrupting the input
and self-train the network for reconstruction of the original input improves the mIoU by highest difference =
2.9% over using reconstruction plus contrastive training objective. Self-training the model improves the mIoU
by 0.48% over initialising with imageNet pre-trained model even with self-training the pre-trained model
too. Random initialisation of the Batch Normalisation layers improves the mIoU by 2.66% over using self-
trained parameters. Self supervision training of the segmentation network reduces the model’s epistemic
uncertainty. The integrated architecture and self-training outperformed the SalsaNext (Cortinhal et al., 2020)
(to our knowledge it’s the best projection based semantic segmentation network) by 5.53% higher mIoU, using
the SemanticKITTI (Behley et al., 2019) validation dataset with 2D input dimension 1024 × 64.
1 INTRODUCTION
In order for autonomous vehicles and robots to ma-
neuver through a dynamic or static environment with-
out collisions, identify objects and take the right de-
cisions, they have to use sensors to precept the sur-
roundings. Light Detection and Ranging (LiDARs)
sensors feature great accuracy and long range detec-
tion capability which make them a perfect fit to the
autonomous driving applications. LiDAR sensor data
are collected and further processed to allow functions
like objects detection, classification and semantic seg-
mentation.
In this study we focus on semantic segmentation
of the LiDAR point cloud which is a challenging task
because it’s sparse compared to camera images and
unstructured. There are multiple approaches to pro-
∗
Code available at https://github.com/MoHassoubah/
lidar tranformer self training
cess LiDAR point cloud, for example PointNet (Qi
et al., 2017a) and PointNet++ (Qi et al., 2017b) do
the task of object detection through operating directly
on the raw data of LiDAR, which is computationally
heavy. Other approaches use 3D grid or voxels to rep-
resent the 3D point cloud like (Zhou and Tuzel, 2017)
and (Tchapmi et al., 2017), but the issue with these
approaches is the sparsity as most of the voxels can
be empty and this can be waste of memory resources
and consume a lot of computational time. There are
the projection based approaches like (Milioto et al.,
2019) and (Cortinhal et al., 2020) where the efficient
2D CNNs based backbones that were developed for
camera images are used for processing the 3D LiDAR
point cloud. This is achieved through projecting the
3D point cloud on a 2D spherical image which is the
best fit for rotating LiDARs. This can have an accu-
rate performance and be fast at the same time.
Having the Trasnformer architecture (Vaswani
et al., 2017) achieving great success in natural lan-
1010
Hassoubah, M., Sobh, I. and Elhelw, M.
Study of LiDAR Segmentation and Model’s Uncertainty using Transformer for Different Pre-trainings.
DOI: 10.5220/0010969700003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 4: VISAPP, pages
1010-1019
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

guage processing tasks, motivated it’s usage in com-
puter vision tasks like image recognition (Dosovitskiy
et al., 2021) and object detection (Carion et al., 2020).
For the Transformer to perform well, it needs to be
pre-trained first on very large datasets. Pre-training
Transformer is still an open area of research.
This work is a study of the impact of integrating
the Transformer architecture (Vaswani et al., 2017)
into the U-Net architecture (Olaf Ronneberger and
Brox, 2015) and applying the new architecture for
the semantic segmentation of 3D point cloud through
the projection based method. Such integration was
implemented before for segmentation of medical im-
ages (Chen et al., 2021) and showed enhanced per-
formance. This work focuses on the application of
different pre-training methods as (Chen et al., 2020),
(Atito et al., 2021) and (Wu et al., 2018) and how
they affect the segmentation performance on the Li-
DAR point cloud. Multiple ablations are executed to
the network architecture, the self-training procedures
and the used segmentation training loss function and
their effects on the segmentation performance and the
model’s epistemic uncertainty are reported. The gen-
erated architecture in this work is compared to Sal-
saNext (Cortinhal et al., 2020) in terms of mIoU score
and the epistemic uncertainty and proved to outper-
form it.
2 RELATED WORK
2.1 Point Cloud Segmentation
Symmetrical operators in (Qi et al., 2017a) and (Qi
et al., 2017b) are applied on point clouds to ensure
order-invariant point segmentation. Max pooling is
used (Qi et al., 2017a) to generate features that are
order-invariant; however, doing this drops the spatial
relations between features which limits it’s usage for
complex scenes. To solve this issue, (Qi et al., 2017b)
created a framework that clusters points in the input
point cloud and applied PointNet (Qi et al., 2017a)
to capture local dependencies. It is applied hierarchi-
cally to encode global dependencies.
Using the above approaches would be difficult for
real world applications like autonomous driving as
sensors that are used in such applications like rotat-
ing LiDARs generate large number of points per scan
= 10
5
. (Milioto et al., 2019) and (Cortinhal et al.,
2020) solve the aforementioned problem by allowing
the usage of of 2D convolutions through spherically
projecting the point cloud on a 2D range image and
the segmentation results are then projected back from
the range image pixels to 3D space. This approach
needs less processing time than that of the rotating
sensor cycle (0.1 sec) though they can be deployed in
real-time. Both (Milioto et al., 2019) and (Cortinhal
et al., 2020) use the U-Net architecture (Olaf Ron-
neberger and Brox, 2015) but they demonstrate lim-
itations in explicitly modeling long-range dependen-
cies. This issue can be solved by combining the U-Net
architecture (Olaf Ronneberger and Brox, 2015) and
the Transformer architecture (Vaswani et al., 2017).
Transformers on the other hand emerge as alternative
architectures with innate global self-attention mecha-
nisms but at the same time can result in limited local-
ization abilities due to insufficient low-level details.
We combine both networks (Cortinhal et al., 2020)
and (Dosovitskiy et al., 2021) as (Chen et al., 2021)
to get the best segmentation results.
2.2 Transformer Applications for 3D
Point Cloud
(Zhao et al., 2020) uses pure transformer based net-
work that operates on point cloud directly. Essen-
tially point clouds are sets embedded in 3D space and
the self-attention in essence is a set operator, where
it is invariant to the input’s permutation and cardinal-
ity. The building block of the network is the Point
Transformer that uses the vector self-attention. The
input is down-sampled through the network using the
Farthest Point Sampling(FPS) and feature pooling us-
ing KNN-graph based encoder and up-sampled in the
decoder via trilinear interpolation when conducting
semantic segmentation of the point cloud. (Bhat-
tacharyya et al., 2021) applies the attention over sub-
set of the point cloud that are most representative
which was learnt from deformation over a randomly
sampled locations. This way such approach can be
applied over huge scans like the ones in the KITTI
(Geiger et al., 2012) and nuscenes (Caesar et al.,
2019) datasets for the detection of objects in 3D point
cloud.
2.3 Transformer Applications for 2D
Images
In the task of image recognition, (Dosovitskiy et al.,
2021) divides the image into 16x16 matrix, then flat-
tens this matrix into a sequence of patches, adding the
positional encoding to each element in the sequence
and feeds the sequence to the transformer. It achieves
state of the art results in image classification task us-
ing pure transformer without convolution networks,
yet it requires to be pre-trained with hundreds of mil-
lions of images using a big infrastructure to surpass
convolution based networks.
Study of LiDAR Segmentation and Model’s Uncertainty using Transformer for Different Pre-trainings
1011

For the task of semantic segmentation of 2D im-
ages, Instead of encoder-decoder based FCN architec-
ture, (Zheng et al., 2021) uses VIT (Dosovitskiy et al.,
2021) as a pure transformer based encoder and a sim-
ple decoder to create powerful segmentation model.
(Chen et al., 2021) combines the U-Net architecture
(Olaf Ronneberger and Brox, 2015) with transformer
architecture (Dosovitskiy et al., 2021) to benefit from
local and global details in the image for better seg-
mentation of medical images. We based our work
in this paper on (Chen et al., 2021) for the semantic
segmentation of 2D range images that are spherically
projected from the 3D LiDAR point cloud.
2.4 Self-supervision Training
In (Jaiswal et al., 2020) the authors conducted a sur-
vey about contrastive self-supervised learning. (As-
sran et al., 2021) trains an encoder network such
that 2 different views of the same unlabeled im-
age are assigned similar pseudo labels. Pseudo-
labels are generated non-parametrically, by compar-
ing the encoded representations of the unlabeled im-
age views to those of a set of labeled images that
were sampled randomly. (Hao et al., 2020) and
(Qi et al., 2020) use Transformer architecture and
self-supervision training objectives like Masked Lan-
guage Modeling (MLM), Masked Object Classifi-
cation (MOC), Masked Region Feature Regression
(MRFR) and Image Text Matching (ITM) to learn
the relation between multi modal inputs ex.image and
associated text. In (Chen et al., 2020), The authors
look into low-level computer vision tasks (including
denoising, super-resolution, and deraining) and cre-
ate a novel pre-trained model called the image pro-
cessing transformer (IPT). They propose using the
well-known ImageNet benchmark to generate a huge
number of altered image pairs to fully investigate the
transformer’s potential. The IPT model is trained us-
ing multi-heads and multi-tails images. Contrastive
learning is also used to aid in the adaption to different
image processing tasks. The pre-trained model can
be employed effectively on the target job after fine-
tuning. (Dai et al., 2021) uses self-supervision train-
ing to increase the speed of convergence and level of
precision of DETR (Carion et al., 2020). The authors
randomly crop patches from the original image and
train the model to localise them back in the image.
2.5 Uncertainty Estimation of Deep
Neural Networks Applications
(Graves, 2011) the author suggests q(w|θ) as the ap-
proximate variational distribution over the weights
(w) of the network. q(w|θ) can be modeled as Gaus-
sian distribution (diagonal covariance) parameterized
by θ which in this case are mean vector µ and standard
deviation σ. (Gal and Ghahramani, 2016) proved that
using this approximate distribution over the weights
(q(w|θ)) corresponds to Gaussian Dropout. In (Lak-
shminarayanan et al., 2017) the authors train en-
semble of the networks ex.5 networks, initialise the
weights of each network randomly and for each in-
put they define the mean and the variance of the out-
put of the network ensemble as an estimation of the
model’s uncertainty. (Balan et al., 2015) trains a stu-
dent network to approximate the Bayesian predictive
distribution of the teacher which can be network en-
semble. This would save memory and inference time
in case the teacher is implemented using the dropout.
(Hern
´
andez-Lobato and Adams, 2015) use the formu-
las developed in (Minka, 2001) to propagate prob-
abilistic densities from the input layer to the output
layer.
3 PROPOSED METHOD
TransUnet architecture (Chen et al., 2021) is the
framework of this study. Instead of applying semantic
segmentation to medical images, it’s done to 2D range
images spherically projected from 3D scans in KITTI
dataset (Geiger et al., 2012) (Behley et al., 2019).
This work studies the effect of self-training on the fi-
nal segmentation results using approaches mentioned
in (Atito et al., 2021). To allow studying the effect
of self-training on the epistemic uncertainty of the se-
mantic segmentation model, the Transformer block in
the network is kept and the convolution based encoder
and decoder networks in (Chen et al., 2021) are re-
placed with those in (Cortinhal et al., 2020) Figure 2.
(Gal and Ghahramani, 2016) is used to calculate the
model’s epistemic uncertainty. Below we discuss in
more details the above points.
3.1 Spherical Projection
Spherical Projection used in (Milioto et al., 2019) is a
way to project the 3D point cloud scan into 2D image.
It is applied to be able to use 2D convolutions with
3D point cloud. For every point in the 3D cloud we
calculate the pixel coordinates in the 2D projection
image using its coordinates x,y and z values. For each
3D point we calculate it’s angle φ with the xz plane
and it’s angle θ with the xy plane.
We define w and h to be the width and height val-
ues of the 2D projection image respectively. θ and
φ values of all points are further processed to fit in
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
1012

the image w and h. This results in u and v values
where the two represent the coordinates of the pro-
jected point in the image. u and v are rounded to the
closest integer and used as an indices for encoding
point range value in the image. Furthermore, before
embedding points in the 2D image and to ensure that
closer points are represented in the projected image,
they are ordered ascendingly by their range value.
3.2 Self-supervision Training
3.2.1 Data Augmentation and Transformation
First LiDAR KITTI dataset (Geiger et al., 2012) is
augmented as (Hahner et al., 2020) to create a training
data for the self-supervision tasks.
3.2.2 Self-training Loss Function
Inspired by (Atito et al., 2021), the first self-training
task is image reconstruction where the input point
cloud is augmented and projected to create original
range image, then another corrupted image is cre-
ated from the augmented point cloud after randomly
dropping percentage of the points in the cloud, this
percentage is sampled from the uniform distribution
U(50,75)%. We use the corrupted image as input and
the objective is to construct the original image before
dropping. L1 loss is used between the predicted im-
age and the original one.
Second task is the prediction of the augmenting
rotation angle around z-axis, where the network is
trained to predict the rotation index of the input im-
age. Cross entropy loss is used for this task. After
implementing this task it’s found that it adds no value
to the training and makes the self-training worse so
we excluded it from the final loss function.
Third task is the contrastive learning, where the
objective is to train the network to generate similar
outputs for synthetically generated content-matching
pairs of same point cloud. At the beginning the nor-
malised temperature-scaled softmax similarity was
used.
Due to our limited GPU dedicated memory, the
maximum batch size used in such setting was N=6
limitting the number of negative samples. This led
that the contrastive training loss was very unstable
and the network wasn’t able to learn the objective. To
solve this issue we resorted to the Noise-Contrastive
estimation NCE with a memory bank approach (Wu
et al., 2018) to increase the number of negative sam-
ples up to 4096.
Let f
i
be the output of contrastive head Figure 1,
while training it’s observed that the absolute value of
f
i
approaches zero that led to failure of the learning
process. To solve this issue we added another regu-
larisation term to the total loss to prevent the elements
of f
i
from decreasing to very small values,
1
∑
N
contr
q=1
f
2
iq
where N
contr
is the size of the contrastive embedding
vector.
3.3 Estimating the Model’s Uncertainty
To estimate the uncertainty of the model, Dropout as
Bayesian approximation (Gal and Ghahramani, 2016)
is used. Having p(y
∗
|x
∗
, X, Y ) as the output predictive
distribution for an input x
∗
and since it can’t be evalu-
ated analytically, it’s approximated to Gaussian pro-
cess N (E({ ˆy
∗
t
}
T
t=1
), Var({ ˆy
∗
t
}
T
t=1
)) where ˆy
∗
is the
output of the model. The first moment is estimated
through executing T forward stochastic passes (en-
abling the dropout) and averaging the results and the
second moment is estimated by adding the variance
of the results to a fixed value representing the model’s
precision for all the input data samples.
We average the predictive probability neg-
ative log-likelihood (PPNLL) values i.e.
−
1
n
val
∑
n
val
i
log p(y
∗
i
|x
∗
i
, X, Y ) for all samples in
the dataset where n
val
is the size of the validation
dataset used for evaluation. This way it’s estimated
to what extent the true data generation process fits
the model’s estimated mean and the uncertainty i.e.
smaller the values is better.
4 EXPERIMENTS AND RESULTS
All the experiments are running on a single GPU
RTX2060 with 6GB dedicated memory.
4.1 Datasets
Our network is trained on the KITTI odemetery
dataset (Geiger et al., 2012) which includes over
43,000 360
◦
LiDAR scans captured by a HDL 64
Velodyne LiDAR; a LiDAR that includes 64 laser
beams and rotates to scan the 3D surrounding struc-
ture. The dataset consists of 22 sequences i.e. se-
quence00 to sequence21. (Behley et al., 2019) pro-
vides point-wise semantic labels to the first 11 se-
quences for training.
When self-training our model as in Section 3.2, all
sequences are used for training except for sequences
{8, 19} that are used for validation. When fine-tuning
i.e. training our model for the semantic segmentation
task, the first 11 sequences are used for training ex-
cept for sequence08 that is used for validation. No
Study of LiDAR Segmentation and Model’s Uncertainty using Transformer for Different Pre-trainings
1013
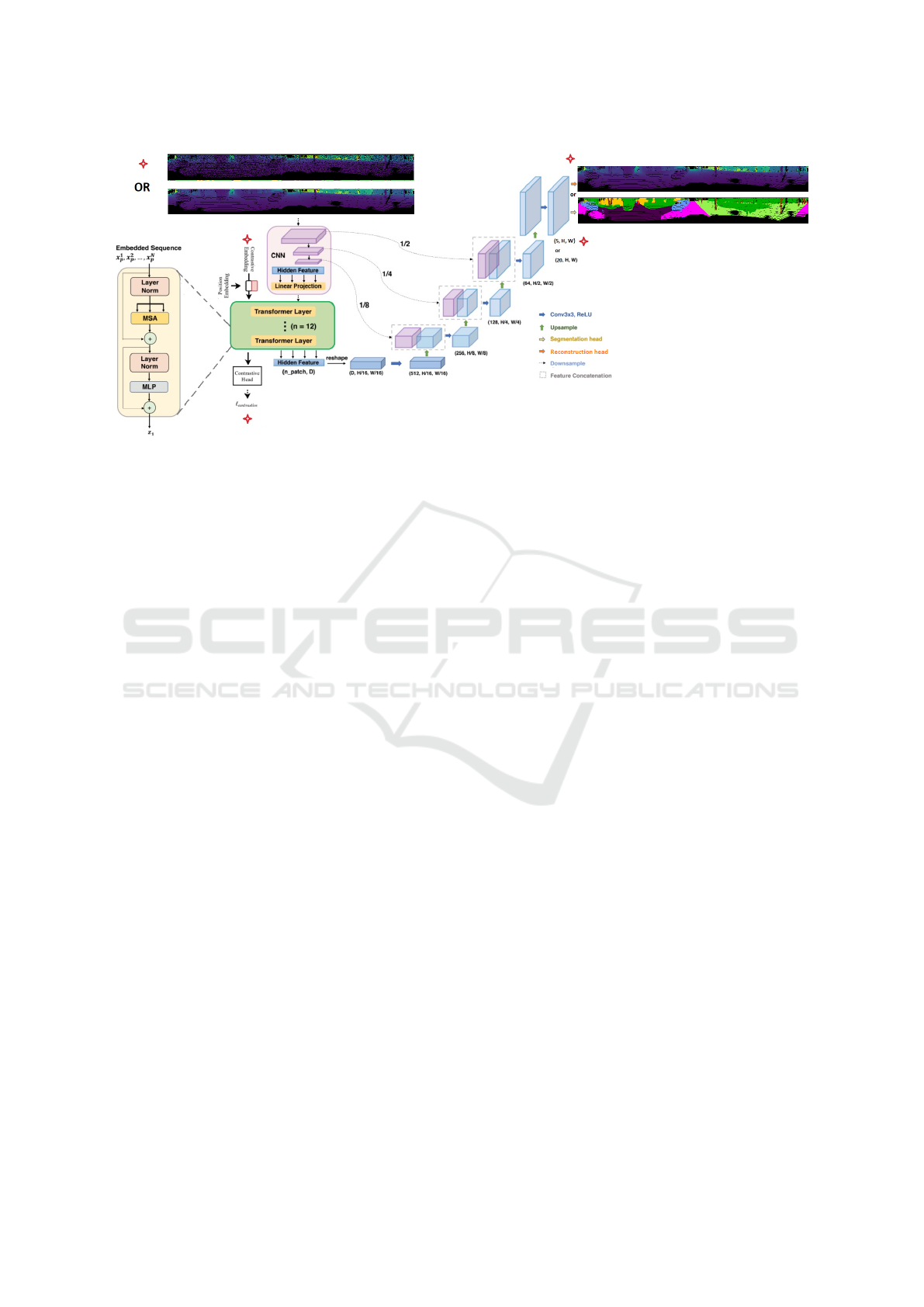
Figure 1: TransUnet architecture (Chen et al., 2021) extended to the self-training setting and used for sematic segmentation
of 2D spherical images projected from 3D point clouds in KITTI dataset (Geiger et al., 2012). The red star points to parts of
the architecture that exists only when self-training.
data augmentation or transformation is applied on the
training and validation sequences when funetuning.
As explained in Section 3.1, point cloud is pro-
jected on a spherical image of size 1024 × 64 and
processed by the network. When evaluation, the out-
put segmentation image is back projected to the point
cloud using k-Nearest-Neighbor (kNN) search (Mil-
ioto et al., 2019) to define the labels of the entire 3D
scan. Image of 2048×64 would have generated better
results but GPU dedicated memory wasn’t enough
4.2 Evaluation Metrics
For the semantic segmentation task, our goal
is to maximize the mean intersection of union
score (mIoU ) of the 20 classes represented in Se-
manticKITTI(Behley et al., 2019)(Geiger et al., 2012)
over the validation dataset.
Also the average PPNLL is compared for different
trained semantic segmentation models, to measure the
certainty i.e. how well the trained network can model
the true generation process of samples.
4.3 Results
4.3.1 Semantic Segmentation Results
Different models are obtained for different network
architectures:
• TransUnet architecture (Chen et al., 2021) Figure
1.
• U-Net architecture Figure 3 b .
• TransUnet architecture (Chen et al., 2021) but
with replacing the CNN based encoder and de-
coder blocks with those used in SalsaNext archi-
tecture (Cortinhal et al., 2020) Figure 2.
• SalsaNext network implementation as (Cortinhal
et al., 2020).
Using one of the above architectures, we first do self-
supervision training using either the reconstruction
loss plus the contrastive loss or only the reconstruc-
tion loss. Training dataset as in section 4.1 is used.
Pre-trained weight parameters are used to initialise
the segmentation network. Pre-training configura-
tions:
• Xavier (Glorot and Bengio, 2010) initialisation of
the segmentation network (a/A Figure 3).
• ImageNet (Deng et al., 2009) pre-trained weights
initialisation (a/B Figure 3).
• Xavier (Glorot and Bengio, 2010) initialisation
then self-training using the reconstruction loss
plus the contrastive loss (a/C Figure 3).
• ImageNet (Deng et al., 2009) pre-trained weights
initialisation then self-training using only the re-
construction loss (a/D Figure 3).
• Xavier (Glorot and Bengio, 2010) initialisation
then self-training using the reconstruction loss
only (a/E Figure 3).
• Xavier (Glorot and Bengio, 2010) initialisation
then self-training using the reconstruction loss
only. When fine-tuning, Batch Normalisation lay-
ers are initialised using the Xavier (Glorot and
Bengio, 2010) (a/F Figure 3).
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
1014
Conv1
GN1 RELU
Conv2
GN2 RELU
Conv3
GN3
input
RELU
output
ResNet blockTransUnet
ResNet blockSalsaNext
Conv1
LRELU
BN1
Conv2
LRELU
BN2
Conv3
LRELU
BN3
Conv4
LRELU
BN4
CAT
Input
Dropout
Output
Decoder blockTransUnet
Conv1 BN1
RELU
2X CAT
Skip connection
Input
Conv2 BN2
RELU
Conv3 BN3
Output
Decoder blockSalsaNext
2X
Dropout CAT Dropout
Skip connection
Conv1
LRELU
BN1 Conv2
LRELU
BN2
Conv3
LRELU
BN3CAT
Conv4
LRELU
BN4Dropout
Input
Output
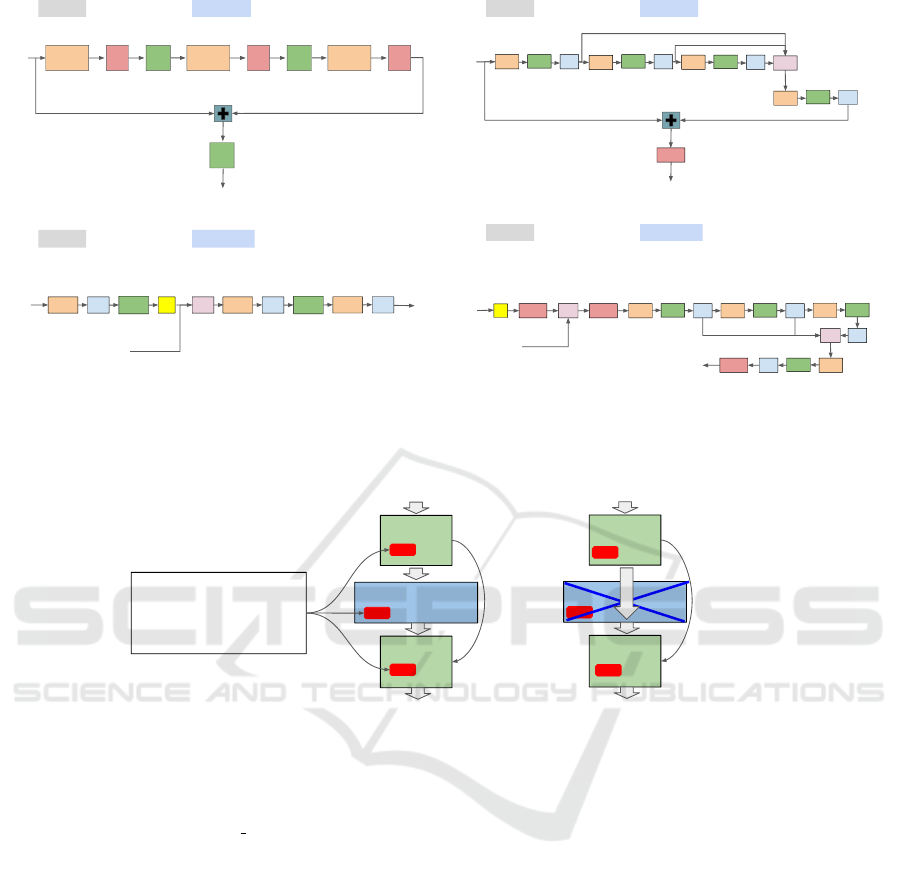
Figure 2: (Top) Architecture of the ResNet block in TransUnet (Chen et al., 2021) (left) and in SalsaNext (Cortinhal et al.,
2020) (right). (Bottom) Architecture of the Decoder block in TransUnet (Chen et al., 2021) (left) and in SalsaNext (Cortinhal
et al., 2020) (right). GN is Group Normalisation, BN is Batch Normalisation, CAT is concatenation layer, 2X is upsampling
by scale factor 2 and + is addition layer.
ENC
Transformer
DEC
input
Segmentation
Output
Skip
connections
A. Xavier-I
B. ImgNet-I
C. Xavier-I & Rec-Con-ST
D. ImgNet-I & Rec-ST
E. Xavier-I & Rec-ST
F. Xavier-I & Rec-ST & BN_R_I
ENC
Transformer
DEC
input
Segmentation
Output
Skip
connections
(a) (b)
Figure 3: Segmentation network initialised for different pre-training configurations. Xavier-i is Xavier initialisation, ImgNet-
i is ImageNet pre-trained weight initialisation, Rec-Con-ST is Reconstruction-Contrastive self-training, Rec-ST is Recon-
struction self-training and BN-R I is the Batch normalisation layers Xavier initialised, instead of the self-trained ones. (a)
TransUnet architecture. (b) U-Net architecture i.e.remove the Transformer.
The Segmentation network is either trained using the
Cross entropy loss or using the Cross entropy loss
plus the Lovasz-Softmax loss (L
ce
+ L
ls
). For any
of the 2 cases we don’t ignore any of the semantic
classes while training.
Semantic segmentation results are evaluated on
the validation dataset (without any data augmentation
or transformation) for different architectures, self-
training procedures and semantic segmentation train-
ing loss functions. mIoU score is shown for each self-
training and segementation training configurations in
Table 1. The results shows that,
• Self-training using reconstruction loss only, gen-
erates much higher mIoU (by highest difference =
2.9%) than using reconstruction plus contrastive
loss function.
• Adding the Transformer block to be a part of the
encoder in the U-Net architecture and doing self-
training improves the mIoU by +1.75% over U-
Net architecture only, even with self-training it too
Table 2.
• Self-training always improves the mIoU result,
where the highest improvement than training from
scratch is +2.28%.
• Initialising the segmentation model weight pa-
rameters using self-trained model for image
reconstruction objective generates better mIoU
(+0.48%) than initialising with pre-trained model
on ImageNet (Deng et al., 2009) for image classi-
fication training objective.
• Starting from Xavier (Glorot and Bengio, 2010)
Study of LiDAR Segmentation and Model’s Uncertainty using Transformer for Different Pre-trainings
1015

initialised weights then doing self-training with
image reconstruction objective, generates better
mIoU (by +0.47%) than starting from ImageNet
pre-trained weights and also doing self-training
with image reconstruction objective.
• Replacing the encoder and decoder blocks in Tan-
sUnet architecture (Chen et al., 2021) with those
in SalsaNext architecture (Cortinhal et al., 2020)
Figure 2 while keeping the self-training proce-
dure and the segmentation training loss function,
improves the mIoU by +11.86%, where there are
huge improvements in the jaccard index of classes
that are relatively small in size and not as repeated
in the dataset (person, bicycle...).
• Xavier (Glorot and Bengio, 2010) initialisation
of the Batch Normalisation layers instead of us-
ing the self-trained ones improves the mIoU by
+2.66%.
• Adding Lovasz-Softmax loss to the Cross entropy
loss function i.e.(L
ce
+L
ls
) improves the mIoU by
+1.38% for the same architecture and same self-
training procedure.
• The best generated model outperforms SalsaNext
(Cortinhal et al., 2020) by +5.53% in the mIoU
score.
Also it’s observed that most of the time using the de-
coder block from the self-trained model generates bet-
ter mIoU (by ≈ 1.3%) than initialising it’s weights
using Xavier (Glorot and Bengio, 2010) in the seg-
mentation network. This is unlike what is mentioned
in (Studer et al., 2019).
4.3.2 Estimating Epistemic Uncertainty of
Different Models
The average PPNLL of the segmentation model is
evaluated over the validation dataset (without aug-
mentation or transformation) for different architec-
tures, self-training procedures and semantic segmen-
tation training loss functions. Dropout rate is 0.2 and
number of forward passes T=20. Mean pixel vali-
dation segmentation loss is evaluated using the nega-
tive log-likelihood loss (NLLLoss). Both the average
PPNLL and the validation segmentation loss are eval-
uated without ignoring any of the semantic classes.
We show the results in Table 3.
• For approximately the same mIoU score (1
st
and
2
nd
rows in Table 3), the segmentation network
initialised using self-trained weights generates
less average PPNLL than the network initialised
using Xavier (Glorot and Bengio, 2010) which
mean less epistemic uncertainty.
• The model that achieves the lowest validation seg-
mentation loss also achieves the lowest average
negative predictive probability log-likelihood.
5 DISCUSSION
It was assumed that the task of the contrastive learn-
ing should allow better generalisation of the encoder
and Transformer networks Figure 1. To make sure it
was performed correctly, the contrastive learning was
validated through 1) randomly augmenting, z-axis ro-
tating and corrupting the validation dataset, 2) save
the contrastive embedding generated for each input
augmented image, 3) measure the distance between
the embedding of the input image (another differently
augmented version) to the saved embeddings, i.e. for
image index i, the output embedding should have the
closest distance to the saved embedding index i − 1 or
i or i + 1, in this case it is considered a match (as con-
secutive scans approximately cover the same scene
in KITTI (Geiger et al., 2012)). The matching accu-
racy score is 72%. Self-training using reconstruction
loss only is better than using reconstruction plus con-
trastive loss function.
This is because contrastive loss is a learning ob-
jective over the image level not the pixel level and
can benefit the images discrimination but not segmen-
tation. Contrastive-Reconstruction self-training, but
this time the constrastvie loss over image patches as
(Chen et al., 2020), didn’t work. This can be rea-
soned that the patches across different images and
across the same image can be very similar for KITTI
dataset (Geiger et al., 2012), making the probability
of matching with the positive samples i.e. patches
from the same image, and the probability of match-
ing with the negative samples i.e. patches from dif-
ferent images both large values. Xavier (Glorot and
Bengio, 2010) initialisation of the Batch Normalisa-
tion layers is better than using the self-trained ones.
This is because when self-training, the parameters
of Batch Normalisation layers are learnt for the aug-
mented training dataset, not the original dataset which
is used for the semantic segmentation training.
Table 3, adding Lovasz-Softmax loss to the Cross
entropy loss function i.e.(L
ce
+L
ls
) generated the best
mIoU score, yet the network’s output has large un-
certainty. The reason can be that the softmax output
score at the true class was the highest between other
classes yet with small margin. The SalsaNext (Cort-
inhal et al., 2020), generates the worst segmentation
validation loss and average PPNLL. This can be rea-
soned that, it ignores unlabeled pixels while training
which leads to miss-classifying them to other classes
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
1016
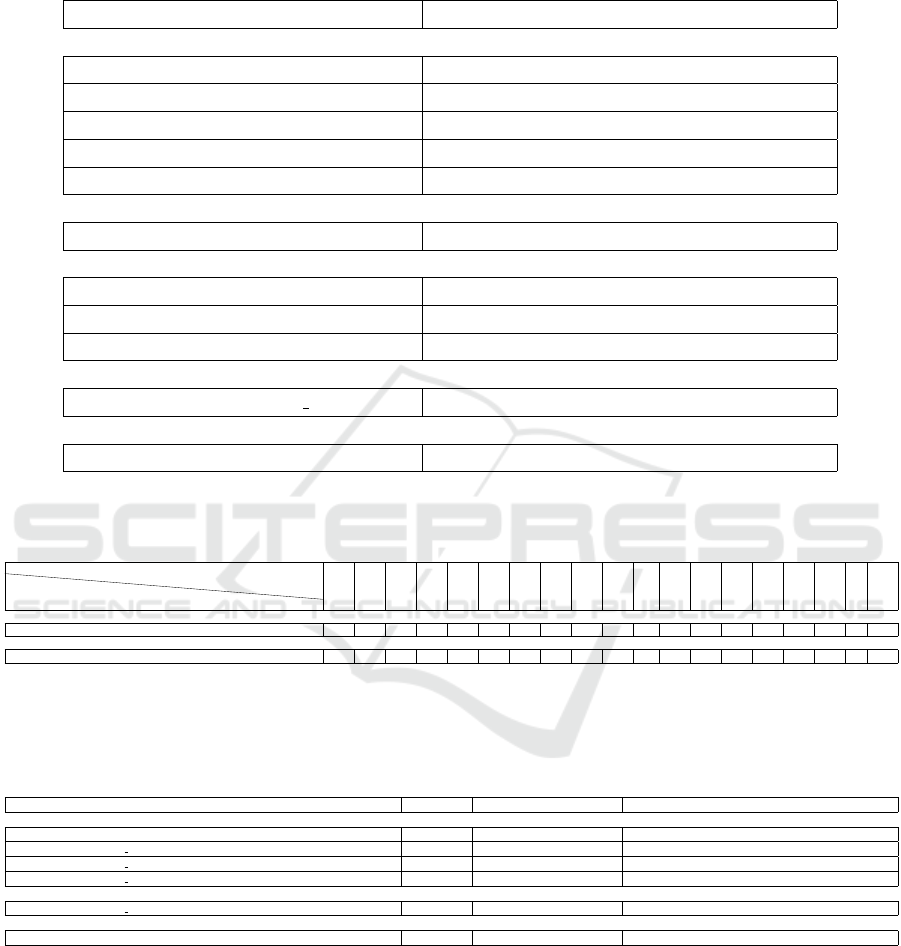
Table 1: Pre-trained models in the table (Figure 3 a) initialise the semantic segmentation network. mIoU scores in percent-
age. Scores are evaluated ignoring the unlabled class. Each sub-table represents different network architectures or different
segmentation training loss functions. Architecture or segmentation loss is same as predecessor sub-table unless mentioned
otherwise. Highest score in each section is in bold.
Pre-training configurations [section 4.3.1] mIoU
TransUnet (Chen et al., 2021), segmentation loss is Cross entropy
Xavier-I 34.28
ImageNet-I 36.08
Xavier-I & Rec-Con-ST 33.66
ImageNet-I & Rec-ST 36.09
Xavier-I & Rec-ST 36.56
Remove the Transformer from TransUnet (Chen et al., 2021)
Xavier-I & Rec-ST 34.81
TransUnet(Chen et al., 2021) replacing ENC & DEC with those in(Cortinhal et al., 2020)
Xavier-I 47.14
Xavier-I & Rec-ST 45.76
Xavier-I & Rec-ST & BN-R-I 48.42
Segmentation loss is Cross entropy + Lovasz-Softmax
Xavier-I & Rec-ST & BN-R I 49.8
SalsaNext (Cortinhal et al., 2020) using the authors’ implementation
Xavier-I 44.27
Table 2: Same as Table 1 but shows the Jaccard index for each class (except for the motorcyclist class as it’s Jaccard index
always 0) and mIoU score, all in percentage to show the improvements from integrating the Transformer into the U-Net
architecture. Higher score for each class is in bold.
Pre-training configurations [section 4.3.1]
Class
car
bicycle
motorcycle
truck
other-vehicle
person
bicyclist
road
parking
sidewalk
other-ground
building
fence
vegetation
trunk
terrain
pole
traffic-sign
mIoU
TransUnet architecture (Chen et al., 2021). Segmentation loss is Cross entropy loss
Xavier-I & Rec-ST 20.13 12.21 11.33 50.01 23.67 17.01 22.14 91.64 27.29 74.01 0.33 77.93 37.36 79.79 38.92 66.58 44.27 0.1 36.56
TransUnet architecture (Chen et al., 2021) without the Transformer block. Segmentation loss is Cross entropy loss
Xavier-I & Rec-ST 19.86 8.25 12.46 30.65 20.94 13.08 28.76 91.33 27.78 73.78 0.03 77.02 32.6 79.69 33.12 68.43 43.47 0.1 34.81
Table 3: This table shows the average PPNLL results of different models. It tries to capture it’s relation to the mean validation
loss and the mIoU socre. Both the average PPNLL and the segmentation validation loss are evaluated (without ignoring any of
the semantic classes). The fist 4 rows test the change in the average PPNLL result for 4 different model versions of the same
network architecture. The 5
th
row shows the results of the best generated model and the last row shows the results generated
after training SalsaNext (Cortinhal et al., 2020).
Pre-training configurations [section 4.3.1] mIoU (Table1) Mean segmentation validation loss Average predictive probability -ve log-likelihood
TransUnet architecture (Chen et al., 2021) with replacing the CNN based encoder and decoder blocks with those in (Cortinhal et al., 2020) Figure 2. Segmentation loss is Cross entropy loss
Xavier-I 47.14 0.283 2.985
Xavier-I & Rec-ST & BN-R I → mIoU score approx. equal above row 47 0.265 2.171
Xavier-I & Rec-ST & BN-R I → lowest mean segmentation validation loss for such architecture 46.18 0.256 1.951
Xavier-I & Rec-ST & BN-R I → Highest mIoU score for such architecture 48.42 0.268 2.445
TransUnet architecture (Chen et al., 2021) with replacing the encoder and decoder blocks with those in (Cortinhal et al., 2020) Figure 2. Segmentation loss is Cross entropy loss + Lovasz-Softmax loss (L
ce
+ L
ls
)
Xavier-I & Rec-ST & BN-R I 49.8 0.286 4.05
SalsaNext (Cortinhal et al., 2020) using the authors’ implementation and training settings
Xavier-I 44.27 2.782 85.523
while validation and increases the model’s epistemic
uncertainty.
6 CONCLUSIONS
Integrating the Transformer into the U-Net architec-
ture and doing self-training improves the mIoU by
+1.75% over U-Net architecture only, even with self-
training it too. Self-training using reconstruction loss
only results in much higher mIoU (by highest dif-
ference = 2.9%) than using reconstruction plus con-
trastive loss function.
Initialising the segmentation model weight param-
eters using self-trained model, results in higher mIoU
(+0.48%) than initialising with ImageNet pre-trained
model.
Study of LiDAR Segmentation and Model’s Uncertainty using Transformer for Different Pre-trainings
1017

Starting from Xavier initialised weights then do-
ing self-training, results in higher mIoU (by +0.47%)
than starting from ImageNet pre-trained weights and
also doing self-training. Still model initialisation us-
ing ImegeNet pre-trained weights outperforms Xavier
initialisation by 1.8% in the mIoU score.
Xavier initialisation of the Batch Normalisation
layers instead of using the self-trained ones improves
the mIoU by +2.66%.
Using the same machine, the same dataset and
same image input size (1024 × 64), our best gener-
ated model outperforms the SalsaNext by +5.53% in
the mIoU score. For approximately the same mIoU
score, the segmentation network initialised using self-
trained weights generates less average PPNLL than
the network initialised using Xavier. This shows that
self-training reduces the epistemic uncertainty of the
model. For the same architecture and same self-
training, the lower segmentation validation loss is, the
lower the model’s epistemic uncertainty.
The recipe that generated the best results was, us-
ing the TransUnet architecture, keep the Transformer
block but with replacing the CNN ResNet and de-
coder blocks with those in the SalsaNext architec-
ture, use the self-supervision training with input re-
construction objective, use the pre-trained weights to
initialise the segmentation network except the batch
normalisation layers which are randomly initialised
and use Cross entropy loss plus the Lovasz-Softmax
loss as the semantic segmentation loss.
REFERENCES
Assran, M., Caron, M., Misra, I., Bojanowski, P., Joulin, A.,
Ballas, N., and Rabbat, M. (2021). Semi-supervised
learning of visual features by non-parametrically pre-
dicting view assignments with support samples. arXiv
preprint arXiv:2104.13963.
Atito, S., Awais, M., and Kittler, J. (2021). Sit:
Self-supervised vision transformer. arXiv preprint
arXiv:2104.03602.
Balan, A. K., Rathod, V., Murphy, K., and Welling,
M. (2015). Bayesian dark knowledge. CoRR,
abs/1506.04416.
Behley, J., Garbade, M., Milioto, A., Quenzel, J., Behnke,
S., Stachniss, C., and Gall, J. (2019). SemanticKITTI:
A Dataset for Semantic Scene Understanding of Li-
DAR Sequences. In Proc. of the IEEE/CVF Interna-
tional Conf. on Computer Vision (ICCV).
Bhattacharyya, P., Huang, C., and Czarnecki, K. (2021). Sa-
det3d: Self-attention based context-aware 3d object
detection.
Caesar, H., Bankiti, V., Lang, A. H., Vora, S., Liong, V. E.,
Xu, Q., Krishnan, A., Pan, Y., Baldan, G., and Bei-
jbom, O. (2019). nuscenes: A multimodal dataset for
autonomous driving. CoRR, abs/1903.11027.
Carion, N., Massa, F., Synnaeve, G., Usunier, N., Kir-
illov, A., and Zagoruyko, S. (2020). End-to-end
object detection with transformers. arXiv preprint
arXiv:2005.12872.
Chen, H., Wang, Y., Guo, T., Xu, C., Deng, Y., Liu,
Z., Ma, S., Xu, C., Xu, C., and Gao, W. (2020).
Pre-trained image processing transformer. CoRR,
abs/2012.00364.
Chen, J., Lu, Y., Yu, Q., Luo, X., Adeli, E., Wangy, Y.,
Lu, L., Yuille, A. L., and Zhou, Y. (2021). Transunet:
Transformers make strong encoders for medical image
segmentation. arXiv preprint arXiv:2102.04306.
Cortinhal, T., Tzelepis, G., and Aksoy, E. E. (2020). Sal-
sanext: Fast, uncertainty-aware semantic segmenta-
tion of lidar point clouds for autonomous driving.
Dai, Z., Cai, B., Lin, Y., and Chen, J. (2021). Up-detr: Un-
supervised pre-training for object detection with trans-
formers. In Proceedings of the IEEE/CVF Conference
on Computer Vision and Pattern Recognition (CVPR),
pages 1601–1610.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-
Fei, L. (2009). ImageNet: A Large-Scale Hierarchical
Image Database. In CVPR09.
Dosovitskiy, A., Beyer, L., Kolesnikov, A., Weissenborn,
D., Zhai, X., Unterthiner, T., Dehghani, M., Minderer,
M., Heigold, G., Gelly, S., Uszkoreit, J., and Houlsby,
N. (2021). An image is worth 16x16 words: Trans-
formers for image recognition at scale. In ICLR.
Gal, Y. and Ghahramani, Z. (2016). Dropout as a bayesian
approximation: Representing model uncertainty in
deep learning.
Geiger, A., Lenz, P., and Urtasun, R. (2012). Are we ready
for Autonomous Driving? The KITTI Vision Bench-
mark Suite. In Proc. of the IEEE Conf. on Computer
Vision and Pattern Recognition (CVPR), pages 3354–
3361.
Glorot, X. and Bengio, Y. (2010). Understanding the diffi-
culty of training deep feedforward neural networks. In
Teh, Y. W. and Titterington, M., editors, Proceedings
of the Thirteenth International Conference on Artifi-
cial Intelligence and Statistics, volume 9 of Proceed-
ings of Machine Learning Research, pages 249–256,
Chia Laguna Resort, Sardinia, Italy. PMLR.
Graves, A. (2011). Practical variational inference for neural
networks. In Shawe-Taylor, J., Zemel, R., Bartlett,
P., Pereira, F., and Weinberger, K. Q., editors, Ad-
vances in Neural Information Processing Systems,
volume 24. Curran Associates, Inc.
Hahner, M., Dai, D., Liniger, A., and Gool, L. V. (2020).
Quantifying data augmentation for lidar based 3d ob-
ject detection. CoRR, abs/2004.01643.
Hao, W., Li, C., Li, X., Carin, L., and Gao, J. (2020).
Towards learning a generic agent for vision-and-
language navigation via pre-training. Conference on
Computer Vision and Pattern Recognition (CVPR).
Hern
´
andez-Lobato, J. M. and Adams, R. P. (2015). Prob-
abilistic backpropagation for scalable learning of
bayesian neural networks.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
1018

Jaiswal, A., Babu, A. R., Zadeh, M. Z., Banerjee, D., and
Makedon, F. (2020). A survey on contrastive self-
supervised learning. CoRR, abs/2011.00362.
Lakshminarayanan, B., Pritzel, A., and Blundell, C. (2017).
Simple and scalable predictive uncertainty estimation
using deep ensembles.
Milioto, A., Vizzo, I., Behley, J., and Stachniss, C. (2019).
Rangenet++: Fast and accurate lidar semantic seg-
mentation. In Proc. of the IEEE/RSJ Intl. Conf. on
Intelligent Robots and Systems (IROS).
Minka, T. P. (2001). A family of algorithms for approximate
bayesian inference. In PhD thesis, Massachusetts In-
stitute of Technology.
Olaf Ronneberger, P. F. and Brox, T. (2015). U-net: Convo-
lutional networks for biomedical image segmentation.
arXiv preprint arXiv:1505.04597.
Qi, C. R., Su, H., Mo, K., and Guibas, L. J. (2017a). Point-
net: Deep learning on point sets for 3d classification
and segmentation. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 652–660.
Qi, C. R., Yi, L., Su, H., and Guibas, L. J. (2017b). Point-
net++: Deep hierarchical feature learning on point sets
in a metric space. In Advances in neural information
processing systems, pages 5099–5108.
Qi, D., Su, L., Song, J., Cui, E., Bharti, T., and Sacheti,
A. (2020). Imagebert: Cross-modal pre-training with
large-scale weak-supervised image-text data. CoRR,
abs/2001.07966.
Studer, L., Alberti, M., Pondenkandath, V., Goktepe, P.,
Kolonko, T., Fischer, A., Liwicki, M., and Ingold,
R. (2019). A comprehensive study of imagenet
pre-training for historical document image analysis.
CoRR, abs/1905.09113.
Tchapmi, L. P., Choy, C. B., Armeni, I., Gwak, J., and
Savarese, S. (2017). Segcloud: Semantic segmenta-
tion of 3d point clouds. CoRR, abs/1710.07563.
Vaswani, A., Shazeer, N., Parmar, N., Uszkoreit, J., Jones,
L., Gomez, A. N., Kaiser, L., and Polosukhin, I.
(2017). Attention is all you need. In Advances in
neural information processing systems, pages 5998—
-6008.
Wu, Z., Xiong, Y., Stella, X. Y., and Lin, D. (2018). Unsu-
pervised feature learning via non-parametric instance
discrimination. In Proceedings of the IEEE Confer-
ence on Computer Vision and Pattern Recognition.
Zhao, H., Jiang, L., Jia, J., Torr, P. H. S., and Koltun, V.
(2020). Point transformer. CoRR, abs/2012.09164.
Zheng, S., Lu, J., Zhao, H., Zhu, X., Luo, Z., Wang, Y.,
Fu, Y., Feng, J., Xiang, T., Torr, P. H., and Zhang,
L. (2021). Rethinking semantic segmentation from a
sequence-to-sequence perspective with transformers.
In CVPR.
Zhou, Y. and Tuzel, O. (2017). Voxelnet: End-to-end learn-
ing for point cloud based 3d object detection. CoRR,
abs/1711.06396.
Study of LiDAR Segmentation and Model’s Uncertainty using Transformer for Different Pre-trainings
1019
