
Pushing the Efficiency of StereoNet: Exploiting Spatial Sparsity
Georgios Zampokas
1,2 a
, Christos-Savvas Bouganis
1 b
and Dimitrios Tzovaras
2 c
1
Imperial College London, London, U.K.
2
Information Technologies Institute, Centre for Research & Technology - Hellas, Thessaloniki, Greece
Keywords:
Deep-learning, Stereo-matching, Sparsity.
Abstract:
Current CNN-based stereo matching methods have demonstrated superior performance compared to tradi-
tional stereo matching methods. However, mapping these algorithms into embedded devices, which exhibit
limited compute resources, and achieving high performance is a challenging task due to the high computa-
tional complexity of the CNN-based methods. The recently proposed StereoNet network, achieves disparity
estimation with reduced complexity, whereas performance does not greatly deteriorate. Towards pushing this
performance to complexity trade-off further, we propose an optimization applied to StereoNet that adapts the
computations to the input data, steering the computations to the regions of the input that would benefit from
the application of the CNN-based stereo matching algorithm, where the rest of the input is processed by a
traditional, less computationally demanding method. Key to the proposed methodology is the introduction
of a lightweight CNN that predicts the importance of refining a region of the input to the quality of the fi-
nal disparity map, allowing the system to trade-off computational complexity for disparity error on-demand,
enabling the application of these methods to embedded systems with real-time requirements.
1 INTRODUCTION
The aim of stereo matching is the estimation of a
disparity map between a rectified image pair; an es-
sential part in applications such as autonomous driv-
ing, robotics navigation and aerial surveying. The
field is now dominated by powerful deep learning-
based approaches, with state-of-the-art accuracy in
the popular stereo-matching datasets (KITTI, Scene-
flow). However, in most practical real-world applica-
tions, latency is a critical factor alongside the qual-
ity of the disparity estimation. Until recently, meth-
ods mostly focused on the accuracy aspect of stereo-
matching, often resulting in large networks, which re-
quire devices with significant computational power.
However, in many cases, the aforementioned applica-
tions are deployed on mobile or embedded devices,
such as drones, mobile phones, or autonomous vehi-
cles. Therefore, an important and timely direction of
research is towards increasing the computational ef-
ficiency of deep-learning methods, allowing to target
less powerful hardware and reduced energy consump-
tion.
a
https://orcid.org/ 0000-0002-3536-5697
b
https://orcid.org/0000-0002-4906-4510
c
https://orcid.org/0000-0001-6915-6722
CNN-based stereo matching methods operate on a
dense manner, processing all image locations equally.
While this results in increased receptive fields, which
produce strong features, it also introduces redundant
computations in flat image regions. In specific CNN
parts, typically towards the end of the network, such
as high resolution upsamplings and refinements in
stereo matching, semantic segmentation and super-
resolution, image regions have a varying impact on
performance. We argue that low-frequency areas of-
ten result in minimal gains when processed by those
parts, while areas with high-frequency details like
edges contribute more on the final result.
An efficient implementation should be able to ei-
ther allocate less processing time for those areas, or
even skip computations on them completely. How-
ever, such areas are not known apriori and have to be
identified during runtime as they are input dependent.
Therefore, the input image needs to be used as a guide
to estimate which areas can contribute most towards
the final result. This constitutes a data-driven opti-
mization approach, which decides how to efficiently
allocate the available computational budget given the
input data.
Considering that, this work focuses on pushing the
efficiency of StereoNet (Khamis et al., 2018), using
a block-sparse approach. StereoNet is a lightweight
Zampokas, G., Bouganis, C. and Tzovaras, D.
Pushing the Efficiency of StereoNet: Exploiting Spatial Sparsity.
DOI: 10.5220/0010919300003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 5: VISAPP, pages
757-766
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
757

Figure 1: The architecture and flow of StereoNet marked in black color. Our proposed methodology (in red color) guides the
the computations to more meaningful regions, according to the output of a parallel Mask Estimation Network.
architecture for stereo disparity estimation, which
achieves a good trade-off between disparity error and
computational complexity, holding a prominent posi-
tion in the performance/complexity pareto front. Low
complexity is achieved by aggressive downsampling
of the 4D cost volume, whereas the disparity refine-
ment part -accounting for almost 60% of the total
computations-, is responsible for refining high fre-
quency details in the final disparity map.
Given a bound on computational resources, which
dictates the necessity of reducing processing in image
regions, we aim at the minimization of error in the
disparity estimation, considering the input image as a
guide. Our key contributions can be summarized as:
1. A block-sparse methodology for increasing the ef-
ficiency of StereoNet, by skipping low importance
computations.
2. We develop a data driven importance mask esti-
mation network to identify image areas, according
to their contribution on final disparity map estima-
tion.
3. A controllable trade-off between disparity error
and computational cost, by introducing a spar-
sity factor, which controls the amount of compu-
tational power to be used.
2 RELATED WORK
The work is placed between the field of real-time
stereo matching and CNN optimization. Research on
real-time stereo has gained a lot of traction lately, due
to the importance of execution latency in real-world
scenarios.
The first attempt for low latency disparity estima-
tion is the work of (Mayer et al., 2016), where they in-
troduced an architecture based on an encoder-decoder
scheme. (Duggal et al., 2019) proposed a method to
prune the disparity search space based on the seminal
work of (Barnes et al., 2009). They map the Patch-
Match algorithm into a fully differentiable recurrent
neural network layer, where each step represents an it-
eration of the original algorithm. To create a more ef-
ficient pipeline, (Yee and Chakrabarti, 2020) replaced
the feature extraction layers of stereo matching net-
works with faster traditional matching costs, to con-
struct the cost volume. Using a multi-branch architec-
ture with depthwise separable convolutions with var-
ious dilation rates, (Xing et al., 2020) proposed two
efficient architectures. By using multiple 2D correla-
tion layers for speed, along with a multi-scale resid-
ual learning technique to tackle vanishing gradients,
(Wang et al., 2020) achieve state-of-the-art perfor-
mance preserving fast inference time. (Wang et al.,
2019) proposed an ”anytime” approach for disparity
estimation, providing disparity estimates at different
stages, with increasing accuracy.
The most computationally expensive part of stereo
matching CNNs is the filtering of a 4D cost volume,
which contains feature correspondences between the
left and right images. It mostly relies in 3D convolu-
tions with complexity of O(K
3
DHWC
in
C
out
), where
H, W represent image dimensions, D is the dispar-
ity levels of cost volume, K is the kernel size and
C
in
,C
out
are the number of input and output channels
of each convolution layer respectively. (Zhang et al.,
2019) subsitute the 3D convolutional blocks with lo-
cal and global aggregation layers, inspired from tradi-
tional stereo matching literature on cost aggregation.
A popular technique to decrease complexity, is the re-
duction of the resolution of cost volume. (Khamis
et al., 2018) aggressively downsample the input im-
ages, constructing a very low resolution volume and
then refine the disparity estimate using image-guided
filters. Building on top of that, (Aguilera et al., 2020)
proposed to replace the heavy 3D convolutional layers
with a lighter U-Net like network to filter the cost vol-
ume, proving its effectiveness on embedded devices.
Towards improving generalization, (Shen et al., 2020)
proposed a multi-scale and multi-dimension approach
to cost volume construction. They build cost vol-
umes at different scales and refine the estimate using
a wrapped 3D volume. Recently, (Tankovich et al.,
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
758
2020) achieved remarkable accuracy by incorporating
image slant to guide geometric wrapping and upsam-
pling, in a multi resolution approach.
There exist multiple directions in optimizing the
computational efficiency of a CNN model, either in
a static or a dynamic way. Decompositions of con-
volutional kernels and connection prunning, have al-
ready been standardized in successful CNN imple-
mentations ((Szegedy et al., 2015), (He et al., 2016)),
demonstrating the success of static optimizations. As
it is more relevant given our data-driven approach, we
focus on dynamic optimization methods. (Figurnov
et al., 2016) attempted to tackle the spatial redun-
dancy in convolutional layers, by skipping computa-
tions on feature maps guided by various perforation
configurations. Later a ResNet based model with a
spatially varying computation time was proposed in
(Figurnov et al., 2017). Computational blocks and
spatial locations within them can be skipped once they
do not contribute to performance, according to a halt-
ing policy. (Teerapittayanon et al., 2016) exploit the
capability of a CNN to predict some samples with
high confidence at early layers, proposing an archi-
tecture with early exits for samples that can be in-
ferred accurately, avoiding executing the full network
for minimal gains. (Shomron et al., 2020) proposed a
method to dynamically predict whether CNN output
feature maps activations are zero or not according to
their neighboring activation values, skipping the zero-
valued ones to save computations.
Our method draws inspiration from (Figurnov
et al., 2017), on estimating the importance of pro-
cessing for various image regions. However, instead
of early-stopping the execution for the whole image
once the network is confident for prediction, we pro-
pose to customize the processing of different parts
given as input. Also, the proposed method departs
from the CNN stereo matching methods, as it pro-
posed a data-driven approach to maximize the qual-
ity of the disparity estimation, given a computational
budget. Most attempts that focus on spatial sparsity
have targeted tasks without dense output such as Im-
age Classification and Human Pose Estimation, thus
to our knowledge this is the first attempt to exploit
spatial sparsity in an inherently dense output com-
puter vision task.
3 IDEA SKETCHING
Current CNN-based algorithms for disparity estima-
tion perform redundant computation in low-frequency
regions, since these regions are going through the
same pipeline as edge and texture regions, without
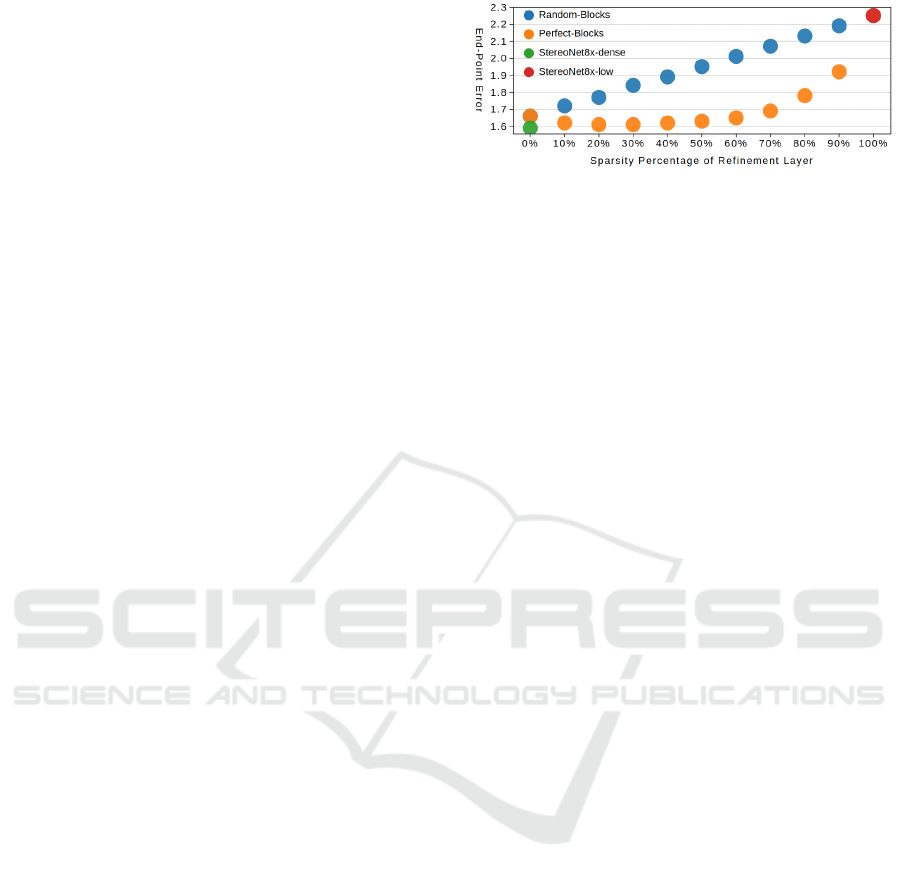
Figure 2: Figure demonstrating the change in EPE with re-
spect to sparsity using block format. Blue dots represent
network operation states where image regions are skipped
by random selection, while orange dots are states which
skip regions in an error-aware manner.
significant impact on the disparity estimation. This is
also the case in StereoNet and to demonstrate this, we
investigate the impact of the computationally heavy
refinement part of Stereonet-8x-Single (Figure 1).
The full architecture consists of a 2D feature extrac-
tor and 3D convolution blocks, which regress a low-
resolution disparity map. Then this map is bilinearly
upsampled to full resolution and further processed to
produce a high-resolution disparity estimate. We train
the network for 11 epochs with 192 disparity lev-
els, on the sceneflow-finalpass dataset (Mayer et al.,
2016), as described in (Khamis et al., 2018), reach-
ing an accuracy of 2.24 pixel End-Point-Error (EPE)
for the coarse and 1.59 pixel EPE for the refinened
disparity estimation over the test set.
On Accuracy. In our analysis, we examine the con-
tribution of refining different image regions to the fi-
nal result, by skipping the refinement of image areas.
We gradually negate the effect of refinement in steps
of 10% of total pixels, or sparsity levels. Pixel se-
lection takes place in two ways, in a random and in
an impact-aware manner. The latter selects the ones
where error reduction after refinement is the largest.
The results indicate that, on average, an increase in
sparsity, results in error increase (Figure 2). In ran-
dom selection cases, error and sparsity are linearly
correlated, whereas by using the actual refinement er-
ror difference as a sparsity mask, the error moves in a
more optimal curve, outperforming random selection,
defining the potential gain using an oracle.
On Computational Cost. In the stereo matching lit-
erature, inference time is utilized as a metric of per-
formance. Aiming to remove the dependency of the
performance from hardware specifications and capa-
bilities and provide a rigid metric, the analysis be-
low focuses on the FLOPs as a description of the
computational complexity of the algorithm. More-
over, convolutions over floating point tensors repre-
sent the bulk of computations, which further justi-
fies the reference to FLOPs. Similar to the previous
analysis, we calculate the FLOPs for 10 sparsity lev-
Pushing the Efficiency of StereoNet: Exploiting Spatial Sparsity
759

Figure 3: Qualitative evaluation of a sample from sceneflow dataset. Sparsity of SS-StereoNet is denoted in parentheses.
Third row contains disparity estimate of selected patch samples from the disparity map above them. Note how Patch #2 is
refined even at 70% sparsity, whereas refinement of Patch #1 is skipped at higher sparsity.
els as F(s) = F
Low
+ (1 − s) ∗ F
Ref
, where s denotes
the sparsity of tensor entering the refinement part and
F
Low
, F
Ref
the FLOPs required by the low resolution
regression and the refinement part respectively.
Conclusion. Considering the above, a set of opera-
tion states exist for this network by adjusting the spar-
sity of the refinement part as seen in Figure 2. In
this work, we attempt to estimate the best perform-
ing sparse states and emerge with an improved per-
formace/cost ratio. The above analysis considers an
ideal scenario regarding computational cost, since the
estimation of a selection mask and the data transfor-
mation introduce additional computational overheads.
Nevertheless, it provides an ideal performance-cost
curve, and an upper bound on the expected perfor-
mance improvements.
4 METHOD OVERVIEW
Focusing on StereoNet, the proposed Spatially Sparse
architecture (SS-StereoNet) extends StereoNet by in-
cluding a parallel CNN mask estimation network
along with the main network. Before executing the
disparity refinement part, the input is divided in active
and non-active blocks according to the output of mask
estimation network. Only active blocks enter the re-
finement pipeline, whereas the rest are not processed.
Finally, after refinement, the output is assembled by
combining the refined active blocks together with the
unchanged non-active blocks.
4.1 Block Format Convention
The StereoNet network contains a series of convolu-
tion layers. An important factor for our approach is
the receptive field of the processing block. To repli-
cate the performance of the original network, an ac-
tive pixel would have to carry information from all
pixels that belong in its receptive field, resulting in
large memory and calculation overhead. Given an in-
put U [H,W,C] entering a set of convolutional blocks,
we would ideally like to isolate each element, and de-
cide whether to process it or not. To replicate the
base network performance for that input, each ele-
ment must carry its receptive field r during process-
ing, which would result in [sHW, 2r + 1,2r + 1,C],
where s the targeted sparsity.
Thus, for any tensor entering a set of convolu-
tional blocks with a total receptive field of r, all el-
ements would require 2r + 1 times the tensor size for
individual processing. The memory requirement is
also augmented with the use of popular dilated con-
volutions, which further enlarge the receptive field,
resulting in significant memory overheads. In an at-
tempt to reduce the memory required, we propose to
handle the data blockwise. This way, the input ten-
sor is divided in blocks and the block element carries
the receptive field overhead of border pixels only, re-
sulting in a more efficient implementation with size
of [s,H/b
W
+ 2r,W /b
H
+ 2r,C], where b
W
, b
H
de-
note block dimensions. Additionally, popular Graph-
ical Processing Units (GPUs) are optimized for dense
data workloads, which leads to a better performance
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
760

Figure 4: The architectures of the two proposed networks for Mask Estimation: Full architecture (top) and Patch architecture
(bottom).
as more structured the data are.
The approach of conveying full receptive fields,
not only increases required memory, but also intro-
duces additional computations. Towards a more op-
timized approach, we opt to discard the block recep-
tive fields completely and use the block as is extracted
from the input tensor. Therefore, both memory and
computational overheads are eliminated, at the cost
of a reduced receptive field.
4.2 Ground Truth Construction
In order to train the mask estimation network, ground
truth mask targets must be extracted. Introducing a
pre-training step, a set of perfect masks M
p
= {m
p
∈
R
n
W
×n
H
}, where n
W
,n
H
are the number of blocks in
the horizontal and vertical dimension, is calculated
for every sample in the dataset and is stored as an
additional temporary dataset. The set of masks is ex-
tracted for a specific blocksize and represent the mean
refinement upside for each image block (x,y), using
results from dense execution of the network,
U
ref
= |d
low
− d
gt
| − |d
dense
− d
gt
|, (1)
m
p
(x,y) =
1
b
W
b
H
b
W
(x+1)
∑
i=xb
W
b
H
(y+1)
∑
j=yb
H
U
ref
(i, j), (2)
where d
low
, d
dense
and d
gt
represent the disparity from
low resolution regression, after refinement and the
ground truth. Consequently, the training can be per-
formed in an end-to-end supervised manner, using M
p
as ground truth targets.
4.3 Mask Estimation Sub-network
A key component of the proposed approach is the
mask estimation network, with the goal of identify-
ing “important” regions in the feature map. The prob-
lem is formulated as a classification task, using binary
Table 1: Patch Architecture for [60,60] patch.
Layer Output size Kernel Channels Stride
conv1 30 × 30 7 × 7 32 2
conv2 15 × 15 3 × 3 64 2
conv3 8 × 8 3 × 3 64 2
conv4 4 × 4 3 × 3 64 2
conv5 4 × 4 3 × 3 32 1
FC n
W
× n
H
(32 × n
W
× n
H
)-dim f c
targets m
bin
(s) ∈ {0, 1}, where s is the given sparsity
factor. For a given s, we sort m
p
and select a threshold
t, as the value of the n
th
element of m
p
. We construct
a binary sparsity mask m
bin
(k) by activating ”impor-
tant” tensor locations and zeroing the rest as,
m
bin
(k) =
(
1, if m
p
(k) > t
0, otherwise
(3)
The Binary Cross Entropy loss is used to supervise
training. While binary classification training sup-
presses the processing upside magnitude, it generates
stronger distinction of active and non-active blocks,
due to the hard labelling.
The Mask Estimation network is aimed to be com-
putationally lightweight, to minimize the overhead
which will be added to the base network. We pro-
pose two different architecture approaches with re-
spect to the input image. In the first approach, the
left RGB image is used as input to the network (SS-
StereoNet-Full). We select a pretrained Shufflenet-v2
(Ma et al., 2018) network to serve as the feature ex-
traction backbone, providing a good starting point for
training. An additional convolution is added to the
end of the network, which redirects the backbone out-
put to a 4 × 4 tensor with 32 features, along with a
final Fully-Connected layer to aggregate information
and produce a m
est
∈ R
2
of size [n
W
,n
H
].
Alternatively, we also propose a network that op-
erates on a regions of the whole input (SS-StereoNet-
Patch). Inspired by the patch architecture proposed
in (Cao and Zhang, 2017), we propose a lightweight
Pushing the Efficiency of StereoNet: Exploiting Spatial Sparsity
761
Table 2: Evaluation on Sceneflow-finalpass dataset. Codes of cited methods are used from their public repositories. Sparsity
in our approaches is denoted with the sparsity percentage in parentheses. Execution times are measured on a Jetson AGX
under MAXN power profile.
Method Parameters (M) FLOPs (G) EPE (px) Time (ms)
PSMNet (Chang and Chen, 2018) 5.25 620.0 1.09 Out of Memory
DeepPruner-Best (Duggal et al., 2019) 7.39 368.0 0.86 2043
HITNet XL (Duggal et al., 2019) 2.07 187.0 0.34 1679
HITNet L (Duggal et al., 2019) 0.97 78.0 0.43 795
DeepPruner-Fast (Duggal et al., 2019) 7.47 135.0 0.97 605
AANet (Xu and Zhang, 2020) 3.93 115.0 0.87 589
StereoNet-8x-Multi (Khamis et al., 2018) 0.40 131.2 1.10 221
DispNetC (Mayer et al., 2016) 38.00 75.0 1.67 191
StereoNet-8x-dense 0.40 113.2 1.59 187
StereoNet-8x-Perforated-2(L
5,6
) (Figurnov et al., 2016) 0.40 98.6 1.88 164
StereoNet-8x-Perforated-2(L
0-6
) (Figurnov et al., 2016) 0.40 69.9 2.08 129
StereoNet-8x-low 0.28 54.4 2.26 85
AAFS (Chang et al., 2020) 0.02 0.7 3.90 72
AnyNet (Wang et al., 2019) 0.04 1.4 3.30 29
SS-StereoNet-Full (50%) 1.02 86.8 1.70 178
SS-StereoNet-Full (70%) 1.02 75.0 1.78 151
SS-StereoNet-Patch (50%) 0.44 87.0 1.66 165
SS-StereoNet-Patch (70%) 0.44 75.2 1.78 138
patch classification architecture, presented in Table 1,
where each layer contains a series of 2D Convolu-
tion, Batch Normalization and Leaky ReLU activation
function. Patches of the RGB image corresponding to
the spatial locations of U , are provided as input to the
mask estimation subnetwork. Therefore, calculations
on each patch are executed independently from other
image areas. Network diagrams for both architectures
are presented in Figure 4.
Since Full architecture operates on the whole im-
age, it uses a larger receptive field than Patch, thus is
able to estimate smoother masks even when the input
does not include many high frequency regions. On
the other hand, Patch is limited on the local receptive
field of each block, requiring the presence of multi-
ple high frequency regions in the image, to estimate a
reliable mask.
4.4 Accuracy Restoration
With a selection method in place, only the set of im-
portant blocks are refined, while skipping the rest.
However, the refinement weights of the base network
correspond to dense image processing and are not
optimized for the new topology. Therefore, an ad-
ditional accuracy restoration step is added, to tailor
the refinement weights to perform better with block
format introduced. Training is performed similar to
the original StereoNet, by minimizing Huber loss, be-
tween disparity estimates and ground truth, although
the dense disparity estimate is produced by the sparse
implementation, by activating all blocks.
4.5 Inference Stage
The ultimate goal of our methodology is to eliminate
the low impact computations during inference. As
mentioned in 4.1, the input tensor U , containing N to-
tal blocks, should be divided in n
1
= (1 −s)×N active
and n
0
= s × N non-active blocks according to the in-
put sparsity factor s. During inference, the mask esti-
mation network provides a continuous output m
est
(x),
which is sorted and then binarized using Eq. 3, sim-
ilarly to ground truth. Using the binary mask as a
guide, we extract two separate tensors T
1
, T
0
from
the input tensor U, corresponding to active and non-
active blocks. Given [H,W,C] is the size of U, tensors
T
1
, T
0
have sizes of [n
1
,b
H
,b
W
,C] and [n
0
,b
H
,b
W
,C]
respectively. T
1
is then used as input to the process-
ing part, resulting in T
0
1
whereas T
0
is left as is. Once
the processing is done, both T
0
1
and T
0
are combined
into the refined U
0
.
5 EXPERIMENTAL RESULTS
We use the same StereoNet-8x-Single model from
the Section 3, which was trained for 11 epochs in
the sceneflow-finalpass dataset (Mayer et al., 2016).
We further finetune the network for 300 more epochs
on either KITTI 2012 (Menze et al., 2015) or KITTI
2015 (Menze et al., 2018). For internal evaluation, a
subset of 160 image pairs from the train set are used
for training, while the rest of them (34 for KITTI
2012, and 40 for KITTI 2015) are used for testing.
The learning rate is set at 0.001 and halves after 200
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
762

Figure 5: Figure presenting the results of our optimized method in sceneflow dataset. The top-left graph depicts the SS-
StereoNet sparse operation states with respect to the theoretical FLOPS. The actual execution time of those operation states is
presented, by implementing them on the following devices: Nvidia GTX 1060 (top-right), Jetson AGX under MAXN profile
(bottom-left) and Nvidia Titan X Maxwell (bottom-right).
epochs. This serves as a performance reference point
for our experiments.
The Mask Estimation sub-network is also trained
on the sceneflow dataset, following the described
methodology for 7 epochs, using Adam optimizer,
along with 0.001 learning rate and batch size of 64.
Similar procedure is followed for KITTI datasets, but
with a reduced batch size of 1. We work with block
size of 60 × 60 for all the experiments. Finally, both
networks are combined and an additional 3 epochs
are required for accuracy restoration, where only the
weights of the refinement part are updated. We use
the Pytorch framework to implement our networks,
while time benchmarks are performed with a Nvidia
Jetson AGX embedded GPU device. Perforated lay-
ers are denoted as Perforated-x(L
i
), where x denotes
the subsampling factor and i is the i − th resblock in
StereoNet refinement pipeline.
5.1 Discussion
We perform an internal evaluation of the proposed SS-
StereoNet on discussed datasets, compared against
their ideal and dense/coarse counterparts. Samples
from KITTI datasets contain images, which include a
large region of irrelevant information with respect to
driving, such as the sky or distant locations. Therefore
they are suitable for the proposed optimization, since
by identifying such regions and skipping the compu-
tations, there is minimal impact in accuracy with re-
duced FLOPs, as demonstrated in Table 3.
Our SS-StereoNet clearly takes advantage of bet-
ter area selection than random mask, almost reach-
ing the ideal target (Figure 5). However, with the ad-
ditional accuracy restoration step, it outperforms the
ideal target, pushing the sparse performance closer
to StereoNet-8x-dense implementation. Our SS-
StereoNet with 50% sparsity performs close to the
dense version, with the minimal loss of 4.4% accu-
racy, while requiring 23% less FLOPs.
An important aspect is the selection of the Mask
Estimation Network architecture, between Full and
Patch. The former incorporates larger context result-
ing in improved mask estimation on data with large
textureless areas (KITTI), whereas the latter requires
high frequency information on a large number of ex-
tracted patches. Therefore, it is deemed more suitable
for data with crisp details, like the sceneflow dataset,
as compared in Figure 8.
To investigate practical gains, we also benchmark
the sparse operation points of SS-StereoNet and their
original architectures on three devices with different
characteristics, shown in Figure 5. Across all devices,
a linear decline of execution time is observed, as spar-
sity is increased. Actual practical gains, compared
to the StereoNet-dense implementation, are achieved
at around 50% sparsity for the desktop GPUs, while
20% sparsity is enough in Jetson AGX device, which
Pushing the Efficiency of StereoNet: Exploiting Spatial Sparsity
763
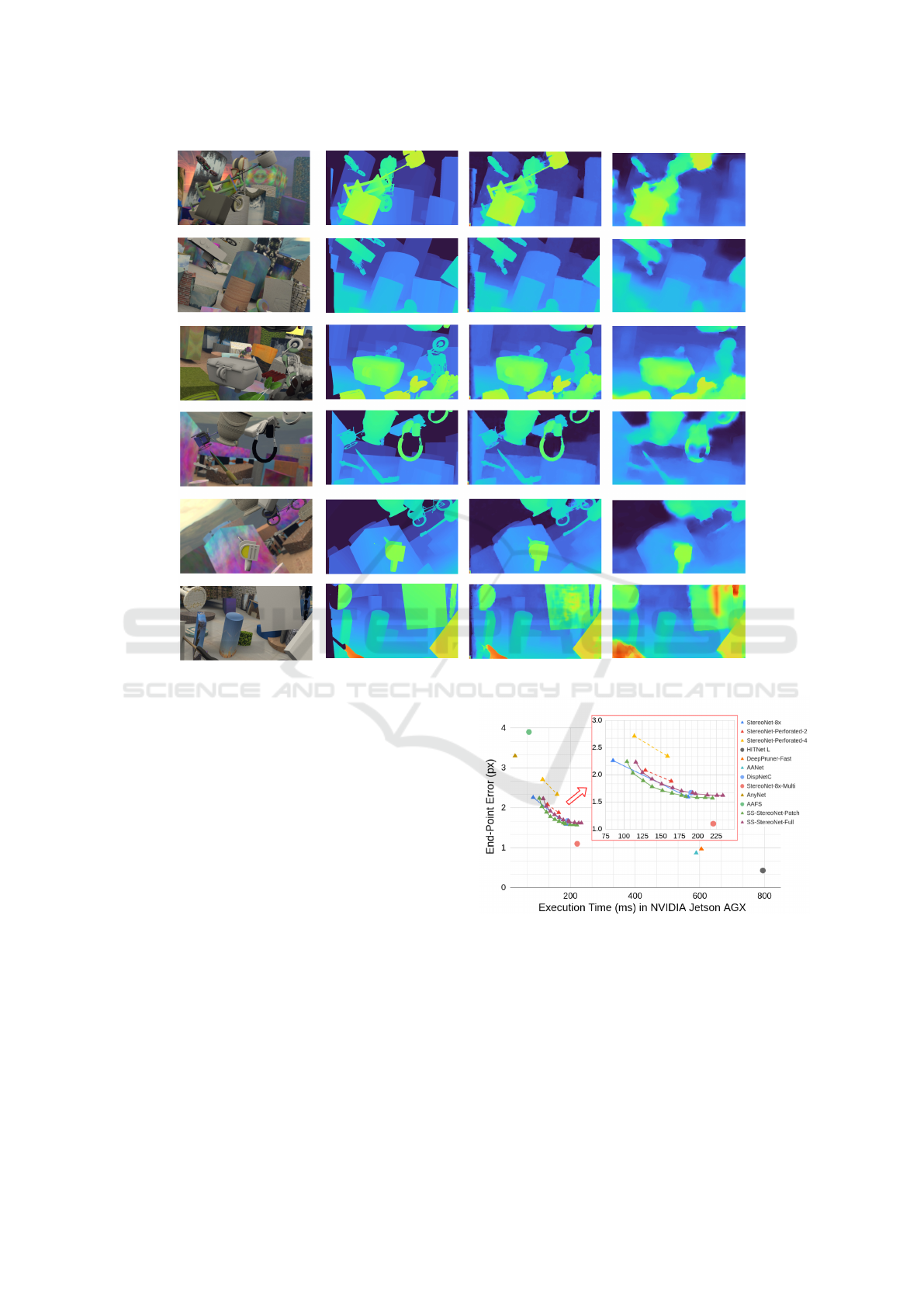
Figure 7: Qualitative evaluation of sceneflow dataset samples. Columns from left to right include: RGB input, Ground Truth,
SS-StereoNet-Patch at 50% sparsity and disparity estimate from AnyNet (Wang et al., 2019) method.
is close to the ideal implementation. The reason is
that the embedded device is kept more busy during
the execution, compared to the desktop devices and
its runtime is not affected significantly by data trans-
formation overheads.
Compared to the other optimization method, ours
outpeforms basic Perforated CNN optimization in
both original and restored version, as seen in Figure 6,
achieving a more efficient application of spatial spar-
sity. Regarding the stereo matching literature, there
exist a set of methods which focus on good accuracy,
whereas others provide very low latency approaches.
The original StereoNet is already well placed together
with the best performing real-time methods. There-
fore, our approach creates a competitive pareto front
for stereo matching accuracy, which can be adjusted
according to the desired FLOPs. Our SS-StereoNet
achieves similar performance to DispNetC (Mayer
et al., 2016), albeit it has with less parameters and
faster execution time. Essentially, we provide an ap-
proach to bridge the gap between lightweight and
ultra-lightweight stereo matching methods, under a
controlled application of spatial sparsity.
Figure 6: Evaluation on Sceneflow-finalpass dataset. Codes
of cited methods are used fromtheir public repositories. Ex-
ecution times are measured on a Jetson AGX under MAXN
power profile.
6 CONCLUSIONS
We enhance StereoNet to enable a performance-
accuracy trade-off, by skipping image regions, with
small contribution to final output. Our method cre-
ates a pareto front of possible operation points, con-
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
764
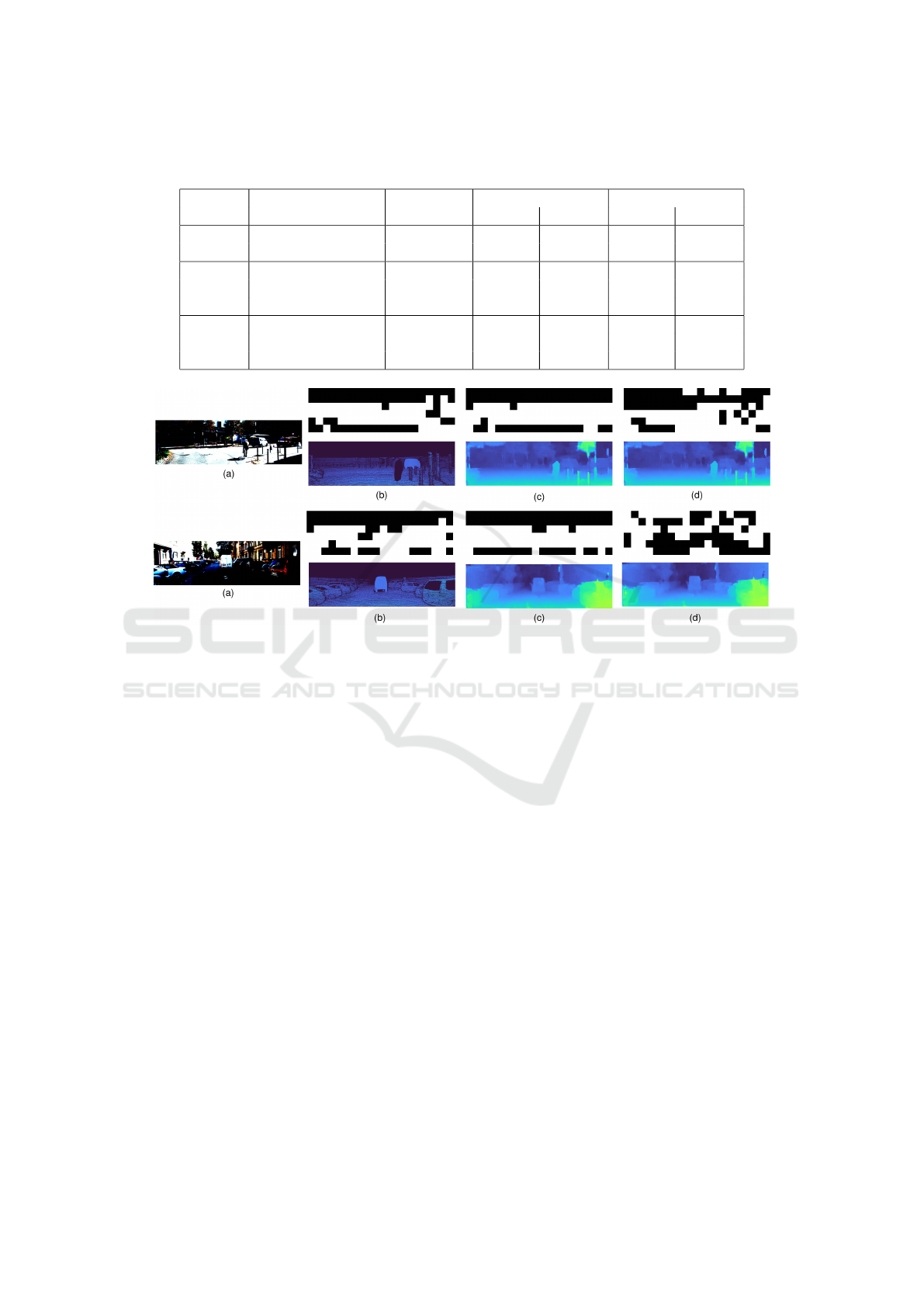
Table 3: Evaluation on KITTI 2012 and KITTI 2015 datasets. The percentage of pixels with error bigger than 3 is reported,
along with the overall EPE.
Sparsity Architecture FLOPs (G)
KITTI2012 KITTI2015
Out-All Avg-All Out-All Avg-All
100% StereoNet8x-low 50.00 6.67 1.29 4.35 1.14
0% StereoNet8x-dense 104.04 4.99 1.05 2.56 0.78
50%
Perfect mask - 5.60 1.11 4.52 1.04
Random mask 77.22 5.90 1.15 4.52 1.04
SS-StereoNet-Full 77.22 5.64 1.11 4.04 0.99
75%
Perfect mask - 6.10 1.17 4.51 1.04
Random mask 70.45 6.25 1.19 4.90 1.08
SS-StereoNet-Full 70.45 6.08 1.17 4.57 1.04
Figure 8: Evaluation on KITTI 2015 samples. Columns contain: input image (a), ground truth (b), SS-StereoNet-Full with
50% sparsity (c), SS-StereoNet-Patch with 50% sparsity (d). Top rows of each sample contain sparsity masks, while bottom
rows contain disparity estimates.
trolled by a sparsity factor, which represents the avail-
able computational resources for disparity estimation.
The proposed optimization methodology is suitable
for any part of a CNN which contains convolutions
operating at high resolution where computation re-
dundancy is more evident. This methodology is a
non-invasive/vertical to the network, meaning it can
be used on top of a suitable trained network to pro-
duce a more efficient version. It can be used in com-
bination with other optimizations, since it does not
interfere with the network flow in a global level.
REFERENCES
Aguilera, C. A., Aguilera, C., Navarro, C. A., and
Sappa,
´
A. D. (2020). Fast CNN stereo depth es-
timation through embedded GPU devices. Sensors,
20(11):3249.
Barnes, C., Shechtman, E., Finkelstein, A., and Goldman,
D. B. (2009). PatchMatch: A randomized correspon-
dence algorithm for structural image editing. In ACM
Transactions on Graphics.
Cao, Q. and Zhang, H. (2017). Combined holistic and local
patches for recovering 6d object pose. In 2017 IEEE
International Conference on Computer Vision Work-
shops (ICCVW), pages 2219–2227.
Chang, J. and Chen, Y. (2018). Pyramid stereo match-
ing network. In Proceedings of the IEEE Confer-
ence on Computer Vision and Pattern Recognition,
abs/1803.08669.
Chang, J.-R., Chang, P.-C., and Chen, Y.-S. (2020).
Attention-aware feature aggregation for real-time
stereo matching on edge devices. In Proceedings of
the Asian Conference on Computer Vision (ACCV).
Duggal, S., Wang, S., Ma, W.-C., Hu, R., and Urtasun, R.
(2019). Deeppruner: Learning efficient stereo match-
ing via differentiable patchmatch. In Proceedings of
the IEEE/CVF International Conference on Computer
Vision (ICCV).
Figurnov, M., Collins, M. D., Zhu, Y., Zhang, L., Huang,
J., Vetrov, D., and Salakhutdinov, R. (2017). Spatially
adaptive computation time for residual networks. In
Proceedings of the IEEE Conference on Computer Vi-
sion and Pattern Recognition (CVPR).
Figurnov, M., Ibraimova, A., Vetrov, D. P., and Kohli, P.
(2016). Perforatedcnns: Acceleration through elimi-
nation of redundant convolutions. In Advances in Neu-
ral Information Processing Systems, volume 29.
Pushing the Efficiency of StereoNet: Exploiting Spatial Sparsity
765

He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Proceedings of
the IEEE Conference on Computer Vision and Pattern
Recognition (CVPR).
Khamis, S., Fanello, S., Rhemann, C., Kowdle, A.,
Valentin, J., and Izadi, S. (2018). StereoNet:
Guided hierarchical refinement for real-time edge-
aware depth prediction. Lecture Notes in Computer
Science (including subseries Lecture Notes in Artifi-
cial Intelligence and Lecture Notes in Bioinformatics),
11219 LNCS:596–613.
Ma, N., Zhang, X., Zheng, H.-T., and Sun, J. (2018). Shuf-
flenet v2: Practical guidelines for efficient cnn archi-
tecture design. In Proceedings of the European Con-
ference on Computer Vision (ECCV).
Mayer, N., Ilg, E., H
¨
ausser, P., Fischer, P., Cremers, D.,
Dosovitskiy, A., and Brox, T. (2016). A large dataset
to train convolutional networks for disparity, optical
flow, and scene flow estimation. In IEEE International
Conference on Computer Vision and Pattern Recogni-
tion (CVPR).
Mayer, N., Ilg, E., H
¨
ausser, P., Fischer, P., Cremers, D.,
Dosovitskiy, A., and Brox, T. (2016). A large dataset
to train convolutional networks for disparity, optical
flow, and scene flow estimation. In 2016 IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 4040–4048.
Menze, M., Heipke, C., and Geiger, A. (2015). Joint 3d esti-
mation of vehicles and scene flow. In ISPRS Workshop
on Image Sequence Analysis (ISA).
Menze, M., Heipke, C., and Geiger, A. (2018). Object scene
flow. ISPRS Journal of Photogrammetry and Remote
Sensing (JPRS).
Shen, Z., Dai, Y., and Rao, Z. (2020). Msmd-net: Deep
stereo matching with multi-scale and multi-dimension
cost volume. CoRR, abs/2006.12797.
Shomron, G., Banner, R., Shkolnik, M., and Weiser, U.
(2020). Thanks for nothing: Predicting zero-valued
activations with lightweight convolutional neural net-
works. In Computer Vision – ECCV 2020, pages 234–
250.
Szegedy, C., Liu, W., Jia, Y., Sermanet, P., Reed, S.,
Anguelov, D., Erhan, D., Vanhoucke, V., and Rabi-
novich, A. (2015). Going deeper with convolutions.
In Proceedings of the IEEE Conference on Computer
Vision and Pattern Recognition (CVPR).
Tankovich, V., H
¨
ane, C., Fanello, S. R., Zhang, Y., Izadi, S.,
and Bouaziz, S. (2020). Hitnet: Hierarchical iterative
tile refinement network for real-time stereo matching.
CoRR, abs/2007.12140.
Teerapittayanon, S., McDanel, B., and Kung, H. (2016).
Branchynet: Fast inference via early exiting from
deep neural networks. In 2016 23rd International
Conference on Pattern Recognition (ICPR), pages
2464–2469.
Wang, Q., Shi, S., Zheng, S., Zhao, K., and Chu, X. (2020).
Fadnet: A fast and accurate network for disparity es-
timation. In 2020 IEEE International Conference on
Robotics and Automation (ICRA), pages 101–107.
Wang, Y., Lai, Z., Huang, G., Wang, B. H., van der Maaten,
L., Campbell, M., and Weinberger, K. Q. (2019). Any-
time stereo image depth estimation on mobile devices.
In 2019 International Conference on Robotics and Au-
tomation (ICRA), pages 5893–5900.
Xing, J., Qi, Z., Dong, J., Cai, J., and Liu, H. (2020). Mab-
net: A lightweight stereo network based on multi-
branch adjustable bottleneck module. In Computer
Vision – ECCV 2020, pages 340–356.
Xu, H. and Zhang, J. (2020). Aanet: Adaptive aggregation
network for efficient stereo matching. In Proceedings
of the IEEE/CVF Conference on Computer Vision and
Pattern Recognition (CVPR).
Yee, K. and Chakrabarti, A. (2020). Fast deep stereo with
2d convolutional processing of cost signatures. In Pro-
ceedings of the IEEE/CVF Winter Conference on Ap-
plications of Computer Vision (WACV).
Zhang, F., Prisacariu, V., Yang, R., and Torr, P. H. (2019).
Ga-net: Guided aggregation net for end-to-end stereo
matching. In Proceedings of the IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition
(CVPR).
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
766
