
Bispectral Pedestrian Detection Augmented with Saliency Maps using
Transformer
Mohamed Amine Marnissi
1,4,5
, Ikram Hattab
2,5
, Hajer Fradi
2,4
, Anis Sahbani
5
and Najoua Essoukri Ben Amara
3,4
1
Ecole Nationale d’Ing
´
enieurs de Sfax, Universit
´
e de Sfax, 3038, Sfax, Tunisia
2
Institut Sup
´
erieur des Sciences Appliqu
´
ees et de Technologie, Universit
´
e de Sousse, 4023, Sousse, Tunisia
3
Ecole Nationale d’Ing
´
enieurs de Sousse, Universit
´
e de Sousse, 4023, Sousse, Tunisia
4
LATIS- Laboratory of Advanced Technology and Intelligent Systems, Universit
´
e de Sousse, 4023, Sousse, Tunisia
5
Enova Robotics, Novation City, 4000, Sousse, Tunisia
Keywords:
Deep Learning, Object Detection, YOLO, Visible and Thermal Cameras, Robotic Vision, Saliency Map,
Transformer, Features Fusion.
Abstract:
In this paper, we focus on the problem of automatic pedestrian detection for surveillance applications. Particu-
larly, the main goal is to perform real-time detection from both visible and thermal cameras for complementary
aspects. To handle that, a fusion network that uses features from both inputs and performs augmentation by
means of visual saliency transformation is proposed. This fusion process is incorporated into YOLO-v3 as
base architecture. The resulting detection model is trained in a paired setting in order to improve the results
compared to the detection of each single input. To prove the effectiveness of the proposed fusion framework,
several experiments are conducted on KAIST multi-spectral dataset. From the obtained results, it has been
shown superior results compared to single inputs and to other fusion schemes. The proposed approach has
also the advantage of a very low computational cost, which is quite important for real-time applications. To
prove that, additional tests on a security robot are presented as well.
1 INTRODUCTION
Pedestrian detection plays a crucial role in the com-
puter vision community. It has been extensively
studied in a wide range of applications such as au-
tonomous driving, video surveillance, human activ-
ity understanding, and robot vision (Liu et al., 2019).
Over the past decade, a significant progress has been
achieved in this field using deep learning models.
Also, it has been mostly studied in the visible do-
main thanks to the availability of visible cameras (Lin
et al., 2020; Ouyang et al., 2016; Liu et al., 2019;
Fradi et al., 2018; Nagy and Cz
´
uni, 2021).
However, it is commonly known that visible cam-
eras are not effective enough at nighttime, bad light-
ing conditions, total darkness, or in adverse weather
conditions. In such situations, thermal cameras can be
instead used since they could better discern warmer
target objects than other surrounding ones (Marnissi
et al., 2021b; Dai et al., 2021; Kieu et al., 2020). For
the aforementioned reasons, earlier attempts in the
field made use of both cameras, which is referred to
as bispectral vision. This solution has been adopted to
substitute the use of two detectors; each one is trained
on the corresponding domain accordingly. Combin-
ing information from both cameras allows to deal with
vast range of weather and lighting conditions.
Usually, these bispectral detectors are based on
complex network architectures compared to the detec-
tion from one single spectrum (Li et al., 2018; Konig
et al., 2017; Guan et al., 2019). Moreover, these de-
tectors rely in most cases on aligned thermal and vis-
ible sensors at inference time (Hwang et al., 2015a).
All these factors limit their feasibility in real-time ap-
plications. Because of the aforementioned reasons,
we focus, in this paper, on the problem of pedestrian
detection from both domains and for real-time appli-
cations. To handle that we propose a new approach
based on feature fusion on YOLOv3 as base architec-
ture. To further improve the detection results, an aug-
mentation with saliency maps using visual saliency
transformation is applied. This augmentation is per-
Marnissi, M., Hattab, I., Fradi, H., Sahbani, A. and Ben Amara, N.
Bispectral Pedestrian Detection Augmented with Saliency Maps using Transformer.
DOI: 10.5220/0010913000003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 5: VISAPP, pages
275-284
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
275

formed through a channel replacement for both in-
puts. The resulting fusion architecture is considered
as the main contribution of this present paper. This
has the advantage of improving the overall perfor-
mance by considering both cues from single inputs
with the corresponding saliency maps. Also, the use
of visual saliency transformer on thermal images in
order to generate deep saliency maps is novel. More-
over, the proposed approach is of low computational
cost which is highly required for real-time applica-
tions.
The remainder of the paper is organized as fol-
lows: in Section 2, an overview of the existing
works for object detection, multispectral detection
and salient detectors is presented. Then, our proposed
approach of feature fusion from thermal and visible
cameras by augmentation with deep saliency maps is
detailed in Section 3. The conducted experiments and
the obtained results are discussed in Section 4. Fi-
nally, we briefly conclude and give an outlook of pos-
sible future works in Section 5.
2 RELATED WORK
In this section, we give an overview of object detec-
tion methods, precisely single spectrum object detec-
tors (visible or thermal) and multispectral object de-
tectors. This overview includes salient object detec-
tors as well.
2.1 Object Detection
The first object detection models were developed
with a set of hand-crafted feature extractors such as
Histogram of Oriented Gradients (HOG) (Dalal and
Triggs, 2005), Deformable Part-based Models (DPM)
(Forsyth, 2014) and Viola-Jones detector (Viola and
Jones, 2001). These models mostly suffer from poor
performance on unfamiliar datasets. Afterwards, deep
networks have promoted the research in many com-
puter vision applications, including object detection
in terms of results and inference time.
Current detectors based on deep models can be di-
vided into two categories: two-stage and one-stage
detectors. In the first category, the detection requires
two stages: the first one consists of generating a set
of regions of interest through the regional proposal
network (RPN) and the second one aims at detect-
ing objects of each proposal. It is the case of R-CNN
(Girshick et al., 2014), Fast R-CNN (Girshick, 2015),
Faster-RCNN (Ren et al., 2015), and Mask R-CNN
(He et al., 2017a) models. Different from two-stage
models, other detectors such as YOLO family (Red-
mon and Farhadi, 2018a; Wang et al., 2021), SSD
(Liu et al., 2016b), and RetinaNet (Lin et al., 2017)
models allow to skip the region proposal step and to
perform the detection directly on a dense sample of
possible locations.
2.2 Pedestrian Detection in Single
Spectrum
Most of the existing pedestrian detection models are
trained on visible images captured under good light-
ing conditions. Some of these models are designed to
address the problems of occlusion (Zhou et al., 2019;
Wu et al., 2020) and scale variance (Jiao et al., 2020;
Lin et al., 2018). To mitigate occlusion problems, in
(Zhou et al., 2019) a discriminative feature transfor-
mation was employed, in which the distance between
the occluded and non-occluded pedestrian examples
is reduced. TFAN (Wu et al., 2020) combined fea-
tures from every current image and nearby images
to improve the representation of pedestrian features
by exploiting temporal information from occluded
pedestrians. Other studies have been carried out in the
field to deal with the problem of scale variance, for ex-
ample, MDFL (Lin et al., 2018) is a multi-grain deep
feature learning that was adopted to solve occlusion
and small scale challenges. In the same context, the
Pose-Embedding Network (PEN) (Jiao et al., 2020)
was introduced to enhance the visual representation
of pedestrian through human pose information.
While these methods improved the performance
of pedestrian detection, they have been applied in the
visible spectrum. However, it is commonly known
that the visible light spectrum is not convenient in
bad light and weather conditions (Kim et al., 2021).
For this reason, other attempts using thermal imagery
have been conducted for pedestrian detection. For in-
stance, in (Ghose et al., 2019) thermal images aug-
mented with their saliency maps to serve as an atten-
tion mechanism for the pedestrian detector are em-
ployed. From the obtained results, it has been shown
that the saliency maps provide complementary infor-
mation to the pedestrian detector resulting in a signif-
icant improvement in performance over the baseline
approach. Also, an enhancement architecture based
on Generative Adversarial Networks, and composed
of contrast enhancement and denoising modules is
proposed in (Marnissi et al., 2021a). The proposed
architecture has shown its advantage to enhance the
overall thermal image quality and to further improve
the detection results.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
276

2.3 Multispectral Pedestrian Detection
To deal with vast range of weather and lighting con-
ditions e.g. rain, fog, daytime and nighttime, mul-
tispectral detectors that use complementary informa-
tion from thermal and visible images in order to en-
hance the visual representation of pedestrians have
been proposed. (Hwang et al., 2015a) is one of
the first works that took advantage of aligned image
pairs for pedestrian detection through a multispectral
aggregation channel features (ACF). Following the
fast development of deep learning, the performance
of multi-spectral pedestrian detectors is greatly im-
proved. For instance, MSDS-RCNN (Li et al., 2018)
is fusion method composed of a multispectral pro-
posal network (MPN) and a multispectral classifica-
tion network (MCN). Park et al. designed in (Park
et al., 2018) a convolutional neural network architec-
ture that has as inputs color, thermal and fusion fea-
tures. To combine them, a channel weighting fusion
layer and accumulated probability fusion by high-
lighting the most robust features are used. In (Cao
et al., 2019), semantic segmentation is performed by
taking advantage of the box-level supervision that
guides the networks to distinguish between the pedes-
trian and the background. An illumination-aware net-
work is added to the detection framework by adjusting
the weight according to the illumination score in (Li
et al., 2019). In (Zhou et al., 2020), an illumination-
aware feature alignment that selects features based
also on an illumination score is proposed. The result-
ing Modality Balance Network (MBNet) facilitates
the optimization process in a balanced manner.
2.4 Salient Object Detection
During the last decades, several methods have been
proposed for saliency detection, which aim to high-
light the most apparent objects in the image. Tra-
ditional sailency object detectors include some pro-
cessing methods such as global contrast, local con-
trast and other features e.g. color and texture (Cheng
et al., 2014; Borji et al., 2019). Recent works use
instead CNN architectures. (He et al., 2017b) is
one of the first algorithms that used U-Net architec-
ture by including compression and expansion paths.
BASNet (Qin et al., 2019) is a prediction and refine-
ment architecture that uses hybrid loss for boundary-
aware salient object detection. The contextual archi-
tecture of spatial attenuation proposed in (Hu et al.,
2020) is used to allow contextual features with differ-
ent attenuation factors to be translated independently
and repeatedly. In order to decompose RGB images
into highlight and detail streams, a label decoupling
method has been presented in (Wei et al., 2020). The
model was also supervised and a feature interaction
network was designed. The two branchs iteratively
exchange information in order to generate accurate
saliency maps. Related work includes (Liu et al.,
2020), where a dynamic feature integration approach
to automatically study feature combinations in rela-
tion to input tasks is proposed. R3-Net (Deng et al.,
2018) presented a refinement network that comprises
a succession of residual refinement blocks (RRBs) for
saliency detection on a single image. The main idea
is to take advantage of RRBs to recurrently learn the
difference between the coarse saliency map and the
ground truth by leveraging both low-level and high-
level features.
3 PROPOSED APPROACH
In this paper, we investigate the use of bispectral vis-
ible and thermal images for pedestrian detection in
various lighting conditions. It is about bispectral fu-
sion augmented with saliency maps for better detec-
tion. Particularly, we employ a fusion scheme that
uses features from paired visible and thermal images
with their corresponding deep saliency maps. The
visible and thermal image channels are meant to be
complementary, where visible images tend to provide
color and texture details, while thermal images are
sensitive to object temperature, which can be very
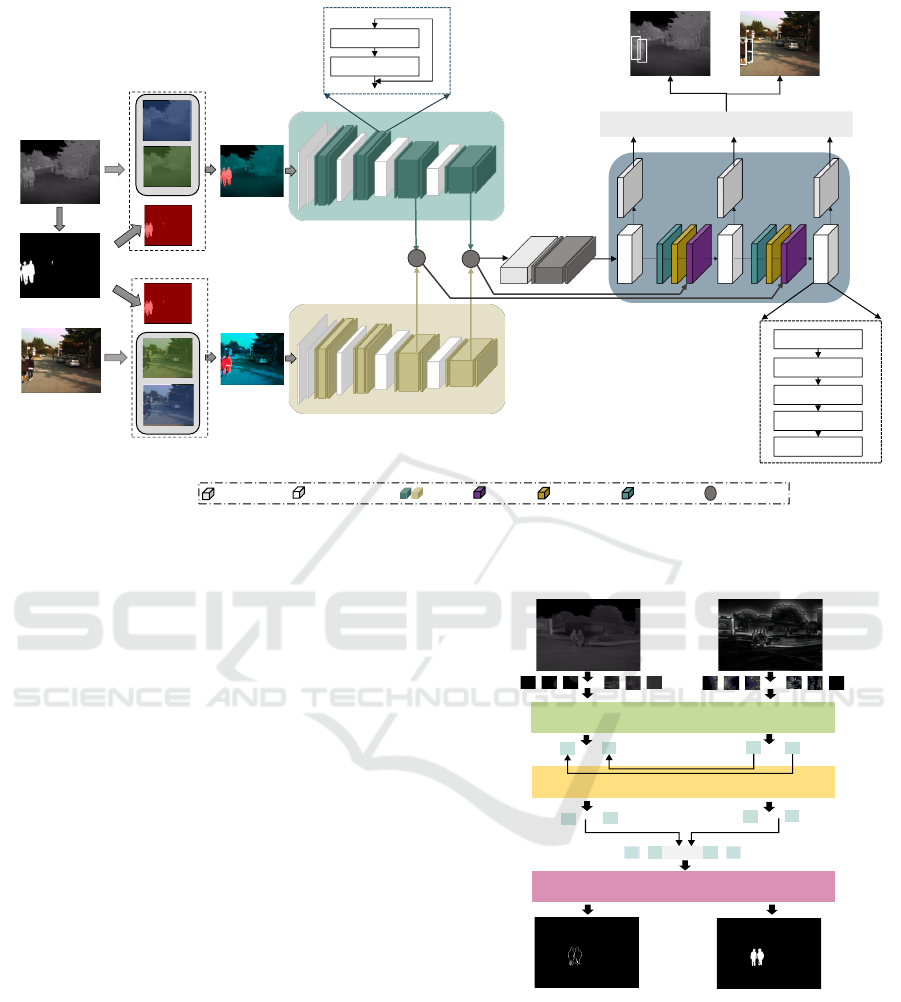
useful in different light conditions. The overall ar-
chitecture is shown in Figure 1. In the following we
are detailing each of these architecture components.
3.1 Base Architecture
YOLO (You Only Look Once) is one of the most
used real-time detectors that belongs to the category
of one-stage. Our proposed approach is developed
using YOLOv3 (Redmon and Farhadi, 2018b) as
base architecture to build a deep neural network com-
bining information from both images and to perform
detection in real-time applications. In this model,
Darknet53 which acts as feature extractor is mainly
composed of 3x3 and 1x1 filters with skip connection
as residual network and consists of five blocks. In-
spired by Feature Pyramid Network (FPN) structure,
YOLOv3 makes three prediction heads: small (grid
size of 13 x 13), medium (26 x 26) and large (52 x 52)
for multi-scale detection. The output result includes
bounding box coordinates, confidence scores for
each class, and object confidence (1 for object and 0
for non-object). The YOLO head outputs are post-
Bispectral Pedestrian Detection Augmented with Saliency Maps using Transformer
277
Convolution3x3
Convolutional Set
Residual
Concatenate
Up Sampling Convolution1x1
Convolutional 1x1
Convolutional 3x3
Residual
Convolutional 1x1
Convolutional 3x3
Convolutional 1x1
Convolutional 3x3
Convolutional 1x1
Convolutional Set
x1
x2
x8
x8
x1
x2
x8
x8
Visible image
Thermal image
Visible image
with mask
Thermal image
with mask
Darknet 53
Darknet 53
Detection Layer
C
C
x4
VST
C
Concat
Figure 1: The architecture of the proposed fusion scheme of visible and thermal images augmented by saliency maps for
pedestrian detection.
processed by non-maximum suppression to re-
move the overlapping bounding boxes.
3.2 Augmentation with Saliency Maps
We propose to enhance visible and thermal images
with their saliency maps by giving better cues for ob-
ject detection during day and night time. These addi-
tional saliency maps are considered to guide the de-
tection process by highlighting some information at
pixel-level. This highlight allows to illuminate the
most visible parts of the image, while preserving the
textural information. Since in our particular case, in-
put images are aligned, we choose to calculate the
saliency maps of thermal images. Practically, we re-
place one duplicated channel of the 3-channel thermal
image by the corresponding saliency map. The same
map is introduced to the visible input through a chan-
nel replacement before feeding them to the network
as can be seen in Figure 1.
In order to highlight some particular regions of
the thermal images, an unified Visual Saliency Trans-
formation (VST) model is adapted. It was originally
proposed in (Liu et al., 2021), with color images and
their corresponding depth maps as inputs. In our case,
VST is used to generate a deep saliency map based
on the thermal image and its static saliency map as
shown in Figure 2. The model first uses an encoder
to generate multi-level tokens from the input image
…
…
Static saliency map
Thermal image
Transformer Encoder
Transformer Convertor
Transformer Decoder
…
…
…
RT2T
RT2T
…
…
T2T
T2T
Figure 2: Architecture of Visual Salient Transformer (VST)
for generating deep saliency maps.
patch sequence using the T2T-ViT model (Yuan et al.,
2021). Then, a converter is applied to transform the
patch tokens into the decoder space. In addition,
cross-modal information fusion for the thermal im-
age and the static saliency map is performed. Finally,
a decoder predicts the deep saliency map through
the patch-task-attention mechanism. Following (Liu
et al., 2021), RT2T transformation is also used to pro-
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
278

(a) Input images (b) Deep saliency maps (c) Concatenated channels
Figure 3: Example results of the generated deep saliency maps concatenated with the input images.
gressively upsample the patch tokens. Figure 3 shows
some results of the generated deep saliency maps and
a concatenation with the input image from each do-
main.
3.3 Fusion Scheme
At this stage, we intend to apply a fusion scheme of
the two input images from both cameras for produc-
ing bispectral images augmented with saliency maps
in order to enable better detection. After adding the
saliency maps as input, we need to choose at which
level the fusion can be performed. Since the back-
bone network as any CNN architecture embed dif-
ferent representations at different abstraction levels,
it is not trivial to choose the most relevant layers or
blocks for feature extraction. It has been demon-
strated in some previous studies in image retrieval and
texture classification (Jun et al., 2019; Fradi et al.,
2021) that intermediate layers, mainly the layer be-
fore the last one mostly performs better than other
layers or blocks. Following these studies, each vis-
ible and thermal input after augmentation is passed
through the first four residual blocks. Once concate-
nated, the model operates on shared feature maps at
the fifth block of the backbone network. To further
justify this choice, we consider other fusion schemes
for comparisons. As a first solution, the images could
be merged at the input stage, i.e. combining infor-
mation of the two raw images. It results in a new
6-channel image by concatenating visible and ther-
mal images simultaneously. This fusion scheme is re-
ferred to as input fusion. Afterwards, we realize the
early-fusion architecture that implements fusion op-
eration before the first block. Then, the feature maps
are fused after the mid-level blocks, namely block1,
block2, block3, for halfway fusion. At the last stage,
we implement the late-fusion architecture, where we
combine the whole blocks of Darknet architecture for
each input.
4 EXPERIMENTAL RESULTS
4.1 Dataset and Experiments
The proposed approach is evaluated on KAIST
(Hwang et al., 2015a), a publically available dataset
commonly used in the field of object detection. It
is one of the largest multi-spectral pedestrian dataset
composed of temporally and spatially aligned visible
and Long-Wave Infrared (LWIR) images under ad-
verse illumination conditions, day and night. The vis-
ible camera generates 640 x 480 pixels resolution with
a 103.6 vertical field of view. However, the thermal
camera has 320 x 256 pixels resolution with a 39 ver-
tical field of view. In total, the dataset approximately
consists of 95k frames on urban traffic environment
and of dense annotations for 1182 different pedestri-
ans. It is divided into a training set of 50.2k images
from Set 00 to Set 05, and a test set of 45.1k images
from Set 06 to Set 11.
In our case, we select every 3 frames from train-
ing sets and every 20 frames from testing sets, and we
only consider the non-occluded, non-truncated and
large instances (> 50). This results in a training set
of 7601 images for both thermal and visible sets, and
a testing set of 2252 (1455 day and 797 night). For
training the deep saliency network, pixel-level anno-
tations as masks are required. Hence, we used a sub-
set of KAIST published in (Ghose et al., 2019), where
mask annotations are provided for 1702 images; 913
day images and 789 night images. Mean Average
Precision (mAP) is used to evaluate the performance
of the proposed detector at Intersection Over Union
Bispectral Pedestrian Detection Augmented with Saliency Maps using Transformer
279

(IOU) equal to 0.5 regarding the ground truth. The ob-
tained results are compared to those obtained in each
domain separately. Also, comparisons to different fu-
sion schemes (input, early, halfway, and late) and ex-
isting methods are considered.
4.2 Implementation Details
Experiments were conducted on NVIDIA TITAN
RTX GPU with 24 GB RAM. For YOLOv3, we used
PyTorch framework which supports GPU comput-
ing. Our custom model YOLOV3 was implemented
based on Darknet framework but with some configu-
rations and modifications in order to adapt the model
to KAIST dataset, to consider the fusion schemes
and to include saliency maps as well. We trained
our model on 30 epochs with a mini-batch size equal
to 8. As optimizer, we used stochastic gradient de-
scent (SGD) with an initial learning rate of 0.0001.
For deep saliency maps generation, VST is trained on
batch size of 8, and 40.000 as total training steps.
4.3 Comparison Results
We evaluate our proposed approach on the test set of
KAIST dataset and we make comparison with single
input from thermal or visible cameras, with the differ-
ent fusion methods suggested for producing the bis-
pectral images and with/without saliency maps as pre-
sented in Table 1. As reported in the table, using our
proposed approach which consists of fusing feature
maps at the fourth block with saliency map augmen-
tation, we got the best results 75.8% in terms of mAP,
with a margin of 17.7% and 9.9% to visible and ther-
mal inputs, respectively. This performance increase
compared to single spectrum is added to the advan-
tage of using one single model for both domains. This
is of significant interest since it allows faster execu-
tion time and less consumption of resources, which
are highly relevant in real-time applications.
To further prove the overall performance of the
proposed approach, we compare the obtained results
to the different fusion schemes. In this table Halfway
fusion-i refers to fusion at i-th block. The corre-
sponding results vary from 59.4% to 63.9% in terms
of mAP at different blocks. Precisely, it is shown
that halfway fusion-4 gives better results compared
to other halfway fusion levels and to input and late
fusions, which corresponds to our observation stated
from the beginning of the paper. Hence, this fusion
level is selected to be coupled with saliency maps,
which results in a overall performance of our pro-
posed approach.
Table 1: Detection performance comparison using single
input (thermal or visible), using different fusion levels,
with/without augmentation with saliency maps. All in terms
of mAP on KAIST dataset.
Methods Day Night All
Visible input 64.4 42.3 58.1
Thermal input 62.7 72.6 65.9
Input-fusion 69.2 46.0 62.8
Early-fusion 67.8 42.1 60.4
Halfway fusion-2 68.5 39.2 59.4
Halfway fusion-3 69.6 44.0 62.1
Halfway fusion-4 69.3 49.5 63.4
Late-fusion 67.7 48.8 62.4
Ours 72.6 79.0 75.8
The corresponding qualitative results on some
sample images from KAIST datasets are shown in
Figure 4. These results also indicate the performance
increase by our detector compared to other single in-
puts. Precisely, in the sample visual results, it is
shown that some false positives and false negatives re-
sults are corrected by the proposed detector compared
to single visible and thermal models.
It is important to highlight that in addition to the
increase of the performance compared to other meth-
ods, the inference time on a test image using our pro-
posed approach is equal to 0.019s which is a quite
interesting result known that the inference time on
one single input is equal to 0.013s. Moreover, we
consider other state-of-the-art methods for compar-
isons, namely, ACF(Hwang et al., 2015b), Halfway
Fusion (Faster RCNN) (Liu et al., 2016a), Fusion
RPN+BF(Konig et al., 2017), IAF R-CNN (Li et al.,
2019), and AR-CNN (Zhang et al., 2019). The com-
parison results are shown in Table 2, with the corre-
sponding inference time of each method.
As depicted in the table, the obtained MR of our
proposed approach is better in some cases and com-
petitive in other cases, however the computational
cost is significantly reduced compared to other meth-
ods. As a result, we conclude that our obtained results
are quite satisfactory while keeping a limited runtime.
Thus our approach is more efficient compared to other
two-stage detectors using complex fusion architecture
in most cases.
4.4 Deployment on a Security Robot
By means of different sessions of acquisition, we built
our dataset using “Pearl Guard”
1
security robot that
has autonomous capability to navigate in different en-
vironments and is equipped by two cameras; ther-
mal and visible cameras. This dataset is composed
1
https://enovarobotics.eu/pguard/
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
280

Figure 4: Qualitative results of our proposed method on four sample images from KAIST. From top to bottom rows, visible
images with their corresponding thermal images and the resulting saliency maps are shown. For each sample image, the
detection results are shown in different color and the corresponding annotated bounding boxes in white color.
of 4615 pairs of visible and thermal images, that are
captured in different lighting conditions by means of
optical zoom x32 and thermal cameras. The dataset
is split to 2956 training images and 1659 test images.
Figure 5 presents some examples of the robot dataset.
It is worth to note that this dataset will be publically
available for research directions.
Figure 5: Visible and thermal samples from the robot
dataset.
We annotated these images using a semi-
automatic strategy. We first apply Faster R-CNN (Ren
et al., 2015) to get some preliminary bounding boxes.
This strategy helps the annotation process since it is
time consuming. These first annotations are corrected
and completed to generate the ground truth. It is im-
portant to note that acquired images suffer from a mis-
alignment problem due to the spatial shift between
cameras, different zooms and inference time. Figure 6
illustrates this problem by displaying the two bound-
ing boxes at the same position in the two images in
order to highlight the shift.
Figure 6: Illustration of the misalignment problem between
thermal and visible cameras of the robot.
To conduct real-tests on the robot, the trained
model on KAIST dataset is fine-tuned on a subset of
the data acquired by the robot. We made this choice
of transfer learning to harness the advantage of the
large-scale of KAIST dataset and to limit the problem
of misalignment using the robot as well. As shown
on the user interface in Figure 7, once the target per-
Bispectral Pedestrian Detection Augmented with Saliency Maps using Transformer
281

Table 2: Comparisons with the state-of-the-art methods on KAIST dataset in terms of miss rate (MR) and speed according to
a given hardware specification. For MR values, lower is better.
Methods MR Speed (Platform)
ACF (Hwang et al., 2015b) 47.32 2.73 (MATLAB)
Halfway Fusion (Faster RCNN) (Liu et al., 2016a) 25.75 0.43 (TITAN X)
Fusion RPN+BF (Konig et al., 2017) 18.29 0.80 (MATLAB)
Ours 17.24 0.019 (TITAN X)
IAF R-CNN (Li et al., 2019) 15.73 0.21 (TITAN X)
IATDNN + IASS(Guan et al., 2019) 14.95 0.25 (TITAN X)
MSDS-RCNN (Li et al., 2018) 11.34 0.22 (1080 Ti)
AR-CNN (Zhang et al., 2019) 9.34 0.12 (TITAN X)
sons are detected using our proposed fusion scheme,
the robot is controlled through a set of commands to
follow them. The tracking process depends on the po-
sition and the size of the detected bounding boxes in
the frame. The distance between the frame center and
the center of the detected bounding box is considered
to determine the the robot movements. Precisely, the
green arrows indicate the horizontal shift to follow the
two detected persons.
Figure 7: Real-time streaming from the thermal and visible
cameras of the security robot with the detected boundary
boxes.
5 CONCLUSION
In this paper, we proposed a novel fusion architec-
ture based on bispectral images and augmented with
saliency maps using transformer. By means of tests
on KAIST dataset, the effectiveness of the proposed
architecture is proven by obtaining better quantitative
and qualitative results compared to single inputs and
to other fusion schemes. By comparisons to the state-
f-the-art methods for fusion, it has been demonstrated
that our proposed approach achieves competitive re-
sults while keeping a very low computational cost.
In addition, real tests of detection on a security robot
have been conduced in order to follow target persons.
As perspectives, other object detectors could be inves-
tigated but always from the one-stage category such
as YOLOr, YOLOx, SDD and RetinaNet. Also, the
results on the robot could be improved by augmenting
the amount of data and by handling the misalignment
problem.
ACKNOWLEDGMENTS
This work has been supported by the DGVR research
fund from the Tunisian Ministry of Higher Education
and Scientific Research that is gratefully acknowl-
edged.
REFERENCES
Borji, A., Cheng, M.-M., Hou, Q., Jiang, H., and Li, J.
(2019). Salient object detection: A survey. Compu-
tational visual media, 5(2):117–150.
Cao, Y., Guan, D., Wu, Y., Yang, J., Cao, Y., and Yang,
M. Y. (2019). Box-level segmentation supervised
deep neural networks for accurate and real-time mul-
tispectral pedestrian detection. ISPRS journal of pho-
togrammetry and remote sensing, 150:70–79.
Cheng, M.-M., Mitra, N. J., Huang, X., Torr, P. H., and
Hu, S.-M. (2014). Global contrast based salient region
detection. IEEE transactions on pattern analysis and
machine intelligence, 37(3):569–582.
Dai, X., Yuan, X., and Wei, X. (2021). Tirnet: Object detec-
tion in thermal infrared images for autonomous driv-
ing. Applied Intelligence, 51(3):1244–1261.
Dalal, N. and Triggs, B. (2005). Histograms of oriented
gradients for human detection. In 2005 IEEE com-
puter society conference on computer vision and pat-
tern recognition (CVPR’05), volume 1, pages 886–
893. Ieee.
Deng, Z., Hu, X., Zhu, L., Xu, X., Qin, J., Han, G., and
Heng, P.-A. (2018). R3net: Recurrent residual refine-
ment network for saliency detection. In Proceedings
of the 27th International Joint Conference on Artifi-
cial Intelligence, pages 684–690. AAAI Press.
Forsyth, D. (2014). Object detection with discriminatively
trained part-based models. Computer, 47(02):6–7.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
282

Fradi, H., Bracco, L., Canino, F., and Dugelay, J.-L. (2018).
Autonomous person detection and tracking frame-
work using unmanned aerial vehicles (uavs). In 2018
26th European Signal Processing Conference (EU-
SIPCO), pages 1047–1051. IEEE.
Fradi, H., Fradi, A., and Dugelay, J.-L. (2021). Multi-layer
feature fusion and selection from convolutional neural
networks for texture classification. In VISIGRAPP (4:
VISAPP), pages 574–581.
Ghose, D., Desai, S. M., Bhattacharya, S., Chakraborty, D.,
Fiterau, M., and Rahman, T. (2019). Pedestrian detec-
tion in thermal images using saliency maps. In Pro-
ceedings of the IEEE Conference on Computer Vision
and Pattern Recognition Workshops, pages 0–0.
Girshick, R. (2015). Fast r-cnn. In Proceedings of the IEEE
international conference on computer vision, pages
1440–1448.
Girshick, R., Donahue, J., Darrell, T., and Malik, J. (2014).
Rich feature hierarchies for accurate object detec-
tion and semantic segmentation. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 580–587.
Guan, D., Cao, Y., Yang, J., Cao, Y., and Yang,
M. Y. (2019). Fusion of multispectral data through
illumination-aware deep neural networks for pedes-
trian detection. Information Fusion, 50:148–157.
He, K., Gkioxari, G., Doll
´
ar, P., and Girshick, R. (2017a).
Mask r-cnn. In Proceedings of the IEEE international
conference on computer vision, pages 2961–2969.
He, S., Jiao, J., Zhang, X., Han, G., and Lau, R. W. (2017b).
Delving into salient object subitizing and detection. In
Proceedings of the IEEE International Conference on
Computer Vision, pages 1059–1067.
Hu, X., Fu, C.-W., Zhu, L., Wang, T., and Heng, P.-A.
(2020). Sac-net: Spatial attenuation context for salient
object detection. IEEE Transactions on Circuits and
Systems for Video Technology, 31(3):1079–1090.
Hwang, S., Park, J., Kim, N., Choi, Y., and So Kweon, I.
(2015a). Multispectral pedestrian detection: Bench-
mark dataset and baseline. In Proceedings of the IEEE
conference on computer vision and pattern recogni-
tion, pages 1037–1045.
Hwang, S., Park, J., Kim, N., Choi, Y., and So Kweon, I.
(2015b). Multispectral pedestrian detection: Bench-
mark dataset and baseline. In Proceedings of the IEEE
conference on computer vision and pattern recogni-
tion, pages 1037–1045.
Jiao, Y., Yao, H., and Xu, C. (2020). Pen: Pose-embedding
network for pedestrian detection. IEEE Transac-
tions on Circuits and Systems for Video Technology,
31(3):1150–1162.
Jun, H., Ko, B., Kim, Y., Kim, I., and Kim, J. (2019). Com-
bination of multiple global descriptors for image re-
trieval. arXiv preprint arXiv:1903.10663.
Kieu, M., Bagdanov, A. D., Bertini, M., and Bimbo,
A. D. (2020). Task-conditioned domain adaptation for
pedestrian detection in thermal imagery. In Computer
Vision - ECCV.
Kim, Y.-H., Shin, U., Park, J., and Kweon, I. S. (2021).
Ms-uda: Multi-spectral unsupervised domain adapta-
tion for thermal image semantic segmentation. IEEE
Robotics and Automation Letters, 6(4):6497–6504.
Konig, D., Adam, M., Jarvers, C., Layher, G., Neumann, H.,
and Teutsch, M. (2017). Fully convolutional region
proposal networks for multispectral person detection.
In Proceedings of the IEEE Conference on Computer
Vision and Pattern Recognition Workshops, pages 49–
56.
Li, C., Song, D., Tong, R., and Tang, M. (2018). Multi-
spectral pedestrian detection via simultaneous detec-
tion and segmentation. In British Machine Vision Con-
ference, BMVC.
Li, C., Song, D., Tong, R., and Tang, M. (2019).
Illumination-aware faster r-cnn for robust multi-
spectral pedestrian detection. Pattern Recognition,
85:161–171.
Lin, C., Lu, J., Wang, G., and Zhou, J. (2020). Graininess-
aware deep feature learning for robust pedestrian de-
tection. IEEE transactions on image processing,
29:3820–3834.
Lin, C., Lu, J., and Zhou, J. (2018). Multi-grained deep
feature learning for robust pedestrian detection. IEEE
Transactions on Circuits and Systems for Video Tech-
nology, 29(12):3608–3621.
Lin, T.-Y., Goyal, P., Girshick, R., He, K., and Doll
´
ar, P.
(2017). Focal loss for dense object detection. In
Proceedings of the IEEE international conference on
computer vision, pages 2980–2988.
Liu, J., Zhang, S., Wang, S., and Metaxas, D. (2016a). Mul-
tispectral deep neural networks for pedestrian detec-
tion. In Proceedings of the British Machine Vision
Conference (BMVC).
Liu, J.-J., Hou, Q., and Cheng, M.-M. (2020). Dynamic fea-
ture integration for simultaneous detection of salient
object, edge, and skeleton. IEEE Transactions on Im-
age Processing, 29:8652–8667.
Liu, N., Zhang, N., Wan, K., Shao, L., and Han, J. (2021).
Visual saliency transformer. In Proceedings of the
IEEE/CVF International Conference on Computer Vi-
sion, pages 4722–4732.
Liu, W., Anguelov, D., Erhan, D., Szegedy, C., Reed, S.,
Fu, C.-Y., and Berg, A. C. (2016b). Ssd: Single shot
multibox detector. In European conference on com-
puter vision, pages 21–37. Springer.
Liu, W., Liao, S., Ren, W., Hu, W., and Yu, Y. (2019). High-
level semantic feature detection: A new perspective
for pedestrian detection. In Proceedings of the IEEE
Conference on Computer Vision and Pattern Recogni-
tion, pages 5187–5196.
Marnissi, M. A., Fradi, H., Sahbani, A., and Amara, N.
E. B. (2021a). Thermal image enhancement using
generative adversarial network for pedestrian detec-
tion. In 2020 25th International Conference on Pat-
tern Recognition (ICPR), pages 6509–6516. IEEE.
Marnissi, M. A., Fradi, H., Sahbani, A., and Amara, N.
E. B. (2021b). Unsupervised thermal-to-visible do-
main adaptation method for pedestrian detection. Pat-
tern Recognition Letters.
Nagy, A. M. and Cz
´
uni, L. (2021). Detecting object de-
fects with fusioning convolutional siamese neural net-
works. In VISIGRAPP (5: VISAPP), pages 157–163.
Bispectral Pedestrian Detection Augmented with Saliency Maps using Transformer
283

Ouyang, W., Zeng, X., and Wang, X. (2016). Learning
mutual visibility relationship for pedestrian detection
with a deep model. International Journal of Computer
Vision, 120(1):14–27.
Park, K., Kim, S., and Sohn, K. (2018). Unified multi-
spectral pedestrian detection based on probabilistic fu-
sion networks. Pattern Recognition, 80:143–155.
Qin, X., Zhang, Z., Huang, C., Gao, C., Dehghan, M.,
and Jagersand, M. (2019). Basnet: Boundary-
aware salient object detection. In Proceedings of the
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition, pages 7479–7489.
Redmon, J. and Farhadi, A. (2018a). Yolov3: An incremen-
tal improvement. arXiv preprint arXiv:1804.02767.
Redmon, J. and Farhadi, A. (2018b). Yolov3: An incremen-
tal improvement. arXiv preprint arXiv:1804.02767.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster
r-cnn: Towards real-time object detection with region
proposal networks. In Advances in neural information
processing systems, pages 91–99.
Viola, P. and Jones, M. (2001). Rapid object detection us-
ing a boosted cascade of simple features. In Proceed-
ings of the 2001 IEEE computer society conference on
computer vision and pattern recognition. CVPR 2001,
volume 1, pages I–I. IEEE.
Wang, C.-Y., Yeh, I.-H., and Liao, H.-Y. M. (2021). You
only learn one representation: Unified network for
multiple tasks. arXiv preprint arXiv:2105.04206.
Wei, J., Wang, S., Wu, Z., Su, C., Huang, Q., and Tian, Q.
(2020). Label decoupling framework for salient ob-
ject detection. In Proceedings of the IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition,
pages 13025–13034.
Wu, J., Zhou, C., Yang, M., Zhang, Q., Li, Y., and Yuan,
J. (2020). Temporal-context enhanced detection of
heavily occluded pedestrians. In Proceedings of the
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition, pages 13430–13439.
Yuan, L., Chen, Y., Wang, T., Yu, W., Shi, Y., Jiang, Z.,
Tay, F. E., Feng, J., and Yan, S. (2021). Tokens-to-
token vit: Training vision transformers from scratch
on imagenet. arXiv preprint arXiv:2101.11986.
Zhang, L., Zhu, X., Chen, X., Yang, X., Lei, Z., and Liu, Z.
(2019). Weakly aligned cross-modal learning for mul-
tispectral pedestrian detection. In Proceedings of the
IEEE International Conference on Computer Vision,
pages 5127–5137.
Zhou, C., Yang, M., and Yuan, J. (2019). Discriminative
feature transformation for occluded pedestrian detec-
tion. In Proceedings of the IEEE/CVF International
Conference on Computer Vision, pages 9557–9566.
Zhou, K., Chen, L., and Cao, X. (2020). Improving mul-
tispectral pedestrian detection by addressing modal-
ity imbalance problems. In Computer Vision–ECCV
2020: 16th European Conference, Glasgow, UK, Au-
gust 23–28, 2020, Proceedings, Part XVIII 16, pages
787–803. Springer.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
284
