
Evolutional Normal Maps: 3D Face Representations for 2D-3D Face
Recognition, Face Modelling and Data Augmentation
Michael Danner
1,2
, Thomas Weber
2
, Patrik Huber
1,3
, Muhammad Awais
1
, Matthias Raetsch
2
and Josef Kittler
1
1
Centre for Vision, Speech & Signal Processing, University of Surrey, Guildford, U.K.
2
ViSiR, Reutlingen University, Reutlingen, Germany
3
Department of Computer Science, University of York, York, U.K.
patrik.huber@york.ac.uk
Keywords:
Deep Learning, Visual Understanding, Machine Vision, Pattern Recognition, 2D/3D Face Recognition, Local
Describers, Normal-Vector-Map Representation.
Abstract:
We address the problem of 3D face recognition based on either 3D sensor data, or on a 3D face reconstructed
from a 2D face image. We focus on 3D shape representation in terms of a mesh of surface normal vectors.
The first contribution of this work is an evaluation of eight different 3D face representations and their mul-
tiple combinations. An important contribution of the study is the proposed implementation, which allows
these representations to be computed directly from 3D meshes, instead of point clouds. This enhances their
computational efficiency. Motivated by the results of the comparative evaluation, we propose a 3D face shape
descriptor, named Evolutional Normal Maps, that assimilates and optimises a subset of six of these approaches.
The proposed shape descriptor can be modified and tuned to suit different tasks. It is used as input for a deep
convolutional network for 3D face recognition. An extensive experimental evaluation using the Bosphorus 3D
Face, CASIA 3D Face and JNU-3D Face datasets shows that, compared to the state of the art methods, the
proposed approach is better in terms of both computational cost and recognition accuracy.
1 INTRODUCTION
Face recognition and matching are important tech-
nologies for many application scenarios, including
identity verification, public security, human-computer
interactions, person tracking and re-identification for
process monitoring such as passenger progression
through airports, secondary authentication for mo-
bile devices, and for indexing into large multimedia
archives of media and entertainment companies. Dur-
ing the last decade, face biometrics research has been
dominated by 2D face recognition. This is primar-
ily the consequence of the recent advent of deep neu-
ral networks, which can learn face image representa-
tions that are largely invariant to nuisance factors such
as illumination and pose changes. However, since
the first computer assisted face recognition system of
Kanade (Kanade, 1977) half a century ago, there has
always been interest in 3D face recognition as the ul-
timate target technology, that has the capacity to dis-
entangle face skin texture from the 3D shape of this
intrinsically 3D object, and use these two sources of
biometric information in the most productive way.
The interest in 3D face recognition is evident not
only from the continuing research on this topic in the
literature (Kittler et al., 2005), but also from the ad-
vances in the development of 3D capture systems. 3D
capable cameras based on binocular stereo vision and
time of flight (ToF) technology are becoming more
and more affordable. For example, Apple have been
shipping user-facing depth cameras in their consumer
mobile phones for a number of years now, and Sony
have started developing next-generation 3D sensors
with ToF technology. Clearly, the quality of images
captured by such user devices is not comparable to the
output of high-resolution 3D scanners and decreases
rapidly with increasing distance, so that the working
distance is typically just a few meters. However, if
the lighting conditions are difficult, and if the subject
is unconstrained in terms of facial expression and oc-
clusions, then the recognition can be more effective
than using purely 2D RGB images. Moreover, 3D
sensing is also more robust to spoofing attacks.
Danner, M., Weber, T., Huber, P., Awais, M., Raetsch, M. and Kittler, J.
Evolutional Normal Maps: 3D Face Representations for 2D-3D Face Recognition, Face Modelling and Data Augmentation.
DOI: 10.5220/0010912000003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 5: VISAPP, pages
267-274
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
267

Our own interest in 3D face recognition is from
the point of view of 3D assisted 2D face recogni-
tion. Sinha et al.(Sinha et al., 2006) showed that both
photo-metric and shape cues are equally used by hu-
mans to recognise faces. The motivation for the 3D
assisted 2D face recognition approach is the disentan-
glement of shape and texture, achieved by 3D face
model fitting. The fitted 3D face should offer a bet-
ter control and aggregation of the different sources of
biometric information (shape and texture), as well as
suppression of the effect of illumination, expression
and pose. The 3D assisted 2D face recognition ap-
proach can also benefit from the availability of large
2D face databases, which are essential for effective
machine learning.
In comparison with 2D, the progress in 3D face
recognition has been hampered not only by expensive
sensor hardware and lack of data for training, but also
by the incongruence of 3D face representations in the
form of 3D meshes with data structures enabling ef-
ficient processing by convolutional neural networks.
However, this problem has recently been overcome
by means of graph neural networks (Scarselli et al.,
2009), and 3D face image remapping onto a 2D mage
structure such as isomap or Laplacian map (Feng
et al., 2018; Kittler et al., 2018). The additional prob-
lem of errors caused by reconstructing a 3D from its
2D projection has also been recently mitigated (Dan-
ner et al., 2019). Thus we are reaching the point when
the vision of 3D assisted 2D face recognition is be-
coming realistic.
This paper is concerned with 3D face recognition
in the context of 3D face biometrics per se, or as the
ultimate step in 3D assisted 2D face recognition. Our
approach involves mapping a 3D face mesh into 2D
for CNN based matching. We confine our interest to
the 3D shape information only, and investigate, how
the face shape should be represented and in what form
it should be provided to the neural network. We shall
explore a number of alternatives to the raw 3D mea-
surement information, and propose a novel represen-
tation, called evolutional normal map, which is shown
to be very effective from the 3D face shape recog-
nition point of view. We compare it with a number
of existing representation methods, and demonstrate
on several 3D databases, that it delivers impressive
recognition accuracy.
The rest of the paper is organised as follows: Sec-
tion 2 reviews the related work and recent approaches
to 3D face representations and 3D assisted 2D face
recognition. Section 3 discusses normal vector maps
as an alternative to raw 3D measurement informa-
tion and introduces our proposed Evolutional Normal
Maps. Section 4 presents the results of an extensive
evaluation of the proposed system and its compari-
son with the state of the art methods. We conduct
experiments with Bosphorus 3D Face (Aly
¨
uz et al.,
2008), CASIA 3D Face Database (Zhong et al., 2008)
and JNU-3D dataset (Koppen et al., 2018) datasets to
benchmark the 3D representations compared. Con-
clusions and future work are presented in section 5.
2 RELATED WORK
3D Face Recognition. A conventional 3D Face
recognition approach comprises methods like 3D face
landmarking, 3D face registration and facial feature
extraction. The 3D face landmarking locates the geo-
metric positions of reference points for the face. The
3D face registration aims to register 3D face scans in
a coordinate system so that the adjustment of facial
features can be carried out in a consistent manner.
Extracting facial features means creating a distinctive
face representation that should fully describe each 3D
face scan. Kakadiaris et al. (Kakadiaris et al., 2017)
already shows the effectiveness of a 3D-2D frame-
work for face recognition. The main advantage is the
more practical use than 3D-3D and higher accuracy
for 2D-2D face recognition.
Face Reconstruction. Dou et al.proposed a way for
Monocular 3D facial shape reconstruction from 2D
facial images (Dou et al., 2017) in a more effective
way than other approaches. Huber et al. (Huber et al.,
2016) also showed the power of 3D Morphable Face
Models in computer vision and the widely utilisable
reconstruction of a 3D face from a single 2D image.
These 3D Morphable Face Models can be used for
pose estimation, analysis and recognition and also for
facial landmark detection and tracking.
Depth Images and Point Clouds. Depth images,
depth point clouds, or 3D meshes have emerged as
an important tool and principle in biometrics and
face recognition research. According to Kakadi-
aris et al. (Kakadiaris et al., 2017) the existing frame-
works for face recognition vary across approaches
(e.g. model-based, data-driven and perceptual) or fa-
cial data domains (e.g. images, point clouds, depth
maps). The main benefits for the use of 3D facial
scans such as depth maps are the insensitivity to ambi-
ent influences and the colour of the skin which could
lead to missing details in 2D face images.
ToF- and Stereo-cameras. Structured-light RGB-
D and Time-of-Flight (ToF) cameras are used in 3D
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
268
perception tasks at close distances. While RGB-D
cameras benefit from high resolution and frame rate,
ToF-cameras have the capability to operate outdoors
and perceive details (Aleny
`
a et al., 2014).
Local Descriptors. For 3D face recognition tasks,
local descriptors have been established due to their
robustness in variations of illumination and facial ex-
pressions and achieved remarkable recognition rates.
Much work is inspired by local descriptors like
Radon transform (Jafari-Khouzani and Soltanian-
Zadeh, 2005), Textons (Lazebnik et al., 2005) and
Local Binary Patterns (LBP) (Ahonen et al., 2004).
Thanks to the high performance and computation-
ally low complexity and its flexibility to adapt, LBP
has a huge number of improved and extended succes-
sors (Pietik
¨
ainen et al., 2011; Huang et al., 2006; Oua-
mane et al., 2017). High-order local pattern descrip-
tors, like local derivative pattern on normal maps cap-
ture more detailed information by encoding various
distinctive spatial relationships (Soltanpour and Wu,
2017; Soltanpour and Wu, 2019; Zhang et al., 2010).
LBPs and other local descriptors will not be discussed
in this work due to the huge number of variations and
to the fact that this is a lossy conversion of 3D shape
information. Further use in face modeling based on
descriptors is therefore difficult. However, they can
easily be adapted on the evolutional normal maps to
further improve face recognition performance.
Normal-vector Map Representations. 3D polygo-
nal surfaces are represented through their correspond-
ing normal map, a bidimensional array which stores
mesh normal vectors as the pixel’s RGB components
of a colour image. Abate et al.calculate the differ-
ence of two normal maps (Abate et al., 2005) and
achieved remarkable results in face recognition based
on these difference maps. In 3D face recognition, nor-
mal maps having x,y,z mapped to RGB for visualisa-
tion is a common task (Kakadiaris et al., 2006). Gi-
lani et al. (Gilani and Mian, 2018; Gilani et al., 2018)
used depth images and normal vectors with azimuth
and elevation in the form of RGB images for training
a deep convolutional neural network.
3 METHODOLOGY
The values of the normal map matrix are determined
by a partial binary operation that maps the x and y co-
ordinates into unit normal vectors. The horizontal and
vertical coordinates define the resolution of the nor-
mal map and the range of this operation. In addition,
the normal map matrix elements can be represented
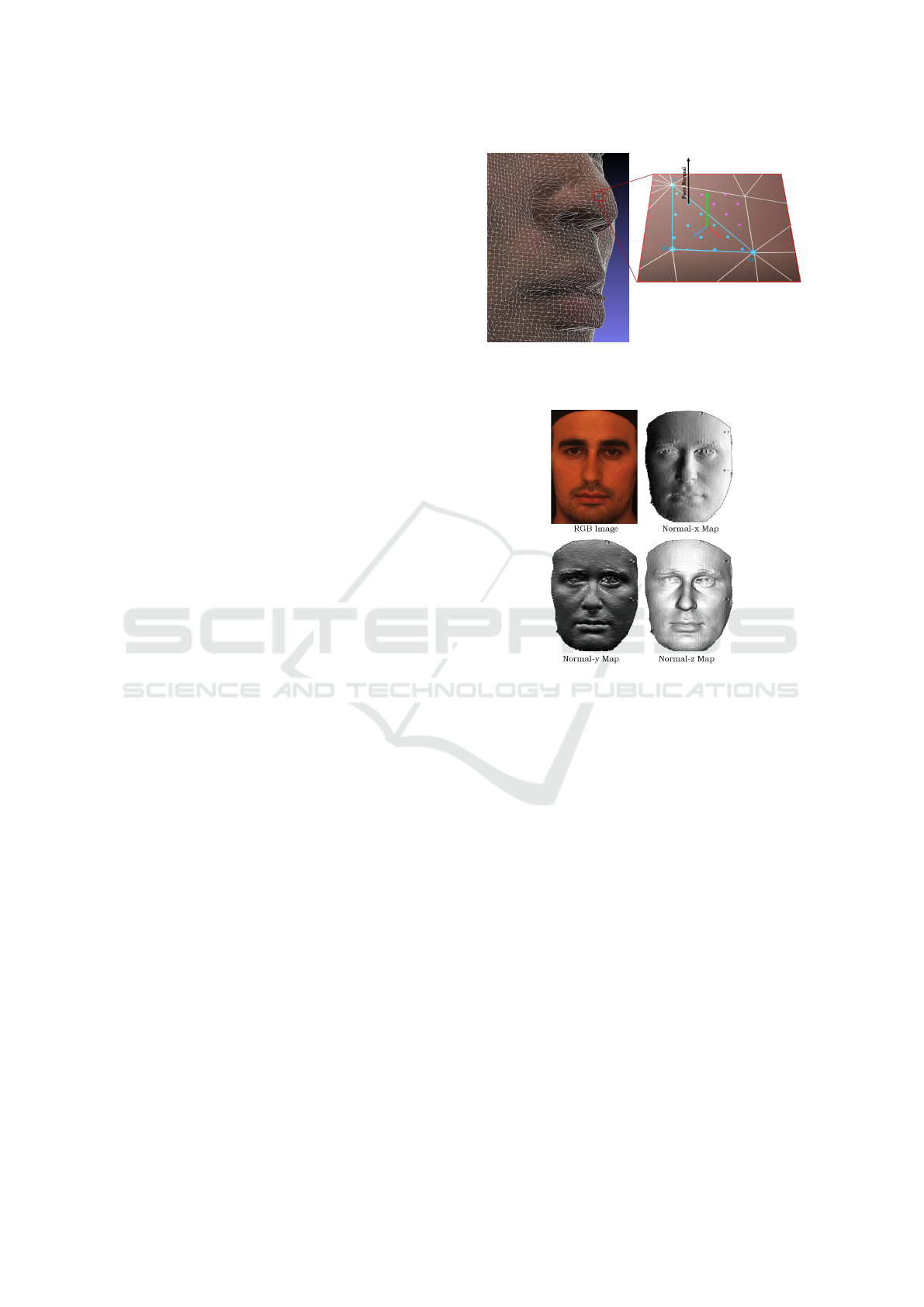
Figure 1: Each triangle is projected into the x,y-plane. the
enclosed pixels are determined and the normal vector com-
ponents are assigned to these pixels.
Figure 2: Portrait picture and normal maps created by con-
ventional methods on Bosphorus 3D Face Database.
by other 2D parameterisations, such as the spherical,
angle-based domain. The normal vectors can be com-
puted from the positions of the 3D points and their
neighbours while the surface is in a point cloud, a 3D
mesh or a range image representation (Daoudi et al.,
2013). The representation of the 3D face shape on
a uniform square matrix that is needed for convolu-
tional neural network, leads to the fact that all normal
maps have the same resolution.
The surface normals contain more detailed and
robust information compared to depth image for 3D
data (Li et al., 2014). Our objective is to explore dis-
criminative facial 3D representations in order to apply
them to 3D facial machine vision tasks. We propose
a refined feature extraction using the surface normals
that provides richer and distinct information, as com-
pared to the other 2D mesh representations.
3.1 Surface Normal Map
This work is inspired by recent algorithms (Mo-
hammadzade and Hatzinakos, 2013; Li et al., 2014;
Evolutional Normal Maps: 3D Face Representations for 2D-3D Face Recognition, Face Modelling and Data Augmentation
269
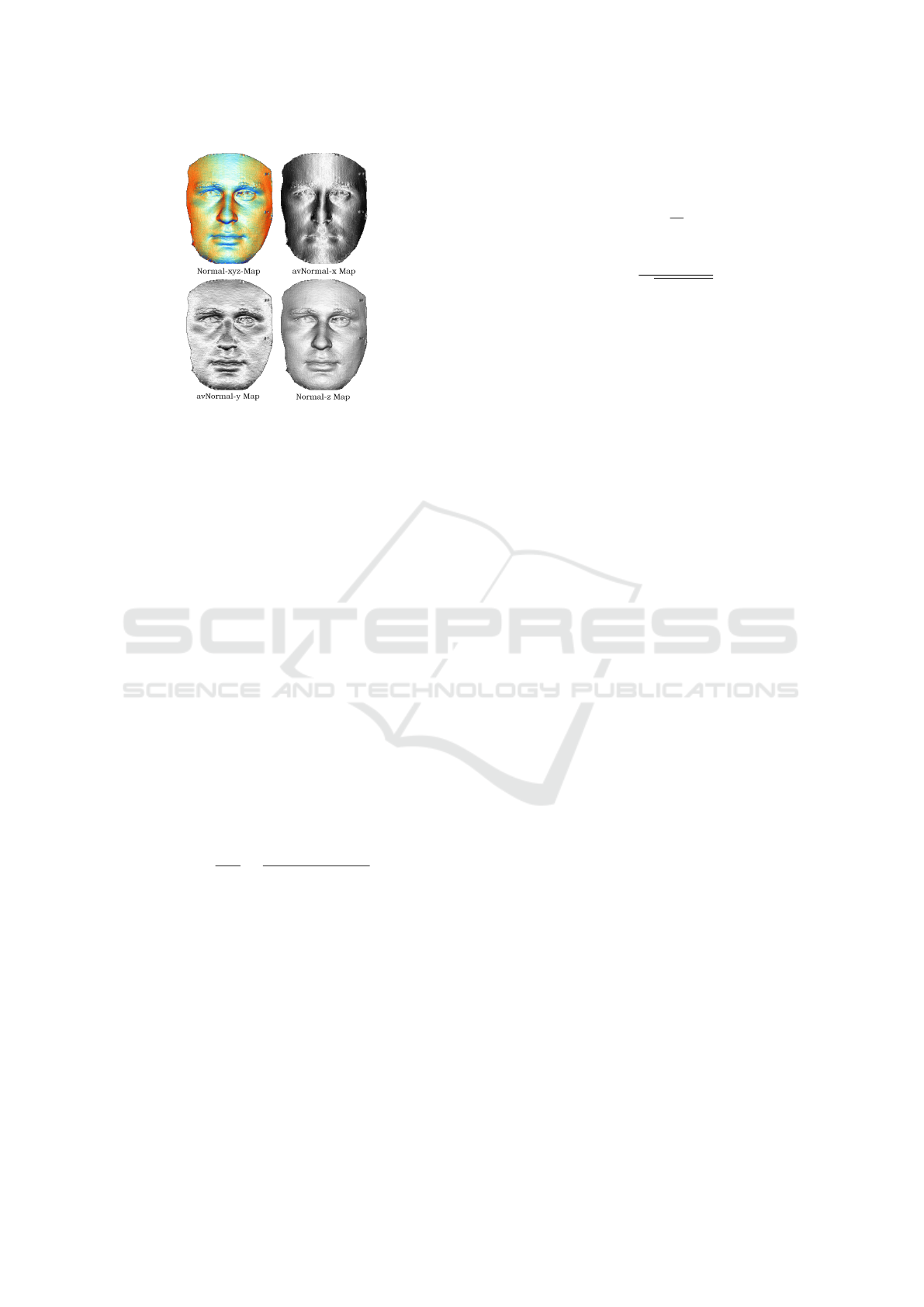
Figure 3: Evolutional normal maps on Bosphorus 3D Face
Database.
Emambakhsh and Evans, 2017) in which surface
normals have been applied for 3D face recognition.
These works follow normal surface estimation meth-
ods presented by Klasing et al. (Klasing et al., 2009).
Although the use of surface normals is a good prac-
tice for point clouds, it is not necessary in popular 3D
Face Databases and registered scan scenarios. A 3D
mesh consists of vertices and faces which can be used
to calculate the normal vectors, instead of estimating.
At first, we have to ensure the mesh is registered
to the x,y-plane and define the space where the ver-
tices are located. The vertices x,y-coordinates will
be mapped to the resulting normal map determining a
transformation. This transformation assigns the coor-
dinates from the domain of the mesh to the domain of
the normal matrix.
Then, for each polygon in the mesh, we calculate
triangles, if necessary. Each triangle consists of three
vertices points P = {p
i
, p
j
, p
k
} where p
n
∈ R
3
. Two
vectors are determined with v
0
= p
j
− p
i
and v
1
=
p
k
− p
i
. Then, a unit normal vector ˆn can be calculated
by
ˆn =
n
||n||
=
v
0
× v
1
||v
0
|| ||v
1
|| | sin θ|
(1)
where ˆn = [ ˆn
x
, ˆn
y
, ˆn
z
]
T
.
Furthermore, each triangle is projected into the
x,y-plane and the enclosed pixels are determined by
giving consideration to the targeted image resolution.
The process in described in Figure 1.
Azimuth and Elevation. Given the surface unit
normal vector ˆn = ( ˆn
x
, ˆn
y
, ˆn
z
) at a point, the azimuth
angle α is defined as the angle between the positive x-
axis and the projection of n to the x-y plane. The ele-
vation angle φ is the angle between n and the vector’s
orthogonal projection onto the xy plane. The eleva-
tion angle is positive when going toward the positive
z-axis from the xy plane.
α = tan
−1
ˆn
z
ˆn
x
(2)
φ = tan
−1
ˆn
y
q
ˆn
2
x
+ ˆn
2
z
(3)
For each pixel the normal vector component is
stored in a 2D-matrix, resulting in five images for x, y,
z, azimuth and elevation values. Optionally, the mini-
mum and maximum of each matrix can be determined
and the histogram values can be stretched to the full
range.
Pixels in these matrices with no assigned values
are considered as background and the background
value is assigned to them, which is 0 by default. Fi-
nally, the matrices N
x
, N
y
, N
z
are surface normal maps
having respectively x, y and z dimensions.
3.2 Evolutional Normal Maps
We now have several methods for calculation and es-
timation of normals and the corresponding algorithms
for depth map and multiple normal maps. The ques-
tion is, can the normal maps and representations based
on them still be improved without loss of informa-
tion? Applying local descriptors lead to increased his-
togram information which is beneficial to face recog-
nition but 3D shape information is lost. Indeed, based
on the fact that increasing histogram information is
helpful, the minimum and maximum values of the
normal component matrices are used to stretch them
to the full range. Additionally, on the matrices with
normal component x and y, the absolute value is
used which doubles the gradients from bright to dark.
These techniques are loss-free and can be facilely re-
versed.
Another method to manipulate histogram values
is used in inverting the values of the matrix to swap
bright and dark grey tones. In the experimental eval-
uation, diverse operations are applied to prove this as
a valuable operation on normal-maps.
It should be emphasised that the methods men-
tioned only represent part of the possibilities with
improving normal maps. That is why we call
the set of 3D representations ‘evolutional’ normal
maps because there are lots of parameters to ad-
just the outcome and they can be flexibly adapted
to many facial 3D machine vision tasks: (a) calcu-
late N
x
, N
y
, N
z
, N
a
, N
e
, Depth map or any combination
of these. (b) Invert greyscale of the normal map.
(c) Darken or lighten normal maps. (d) Calculate real
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
270
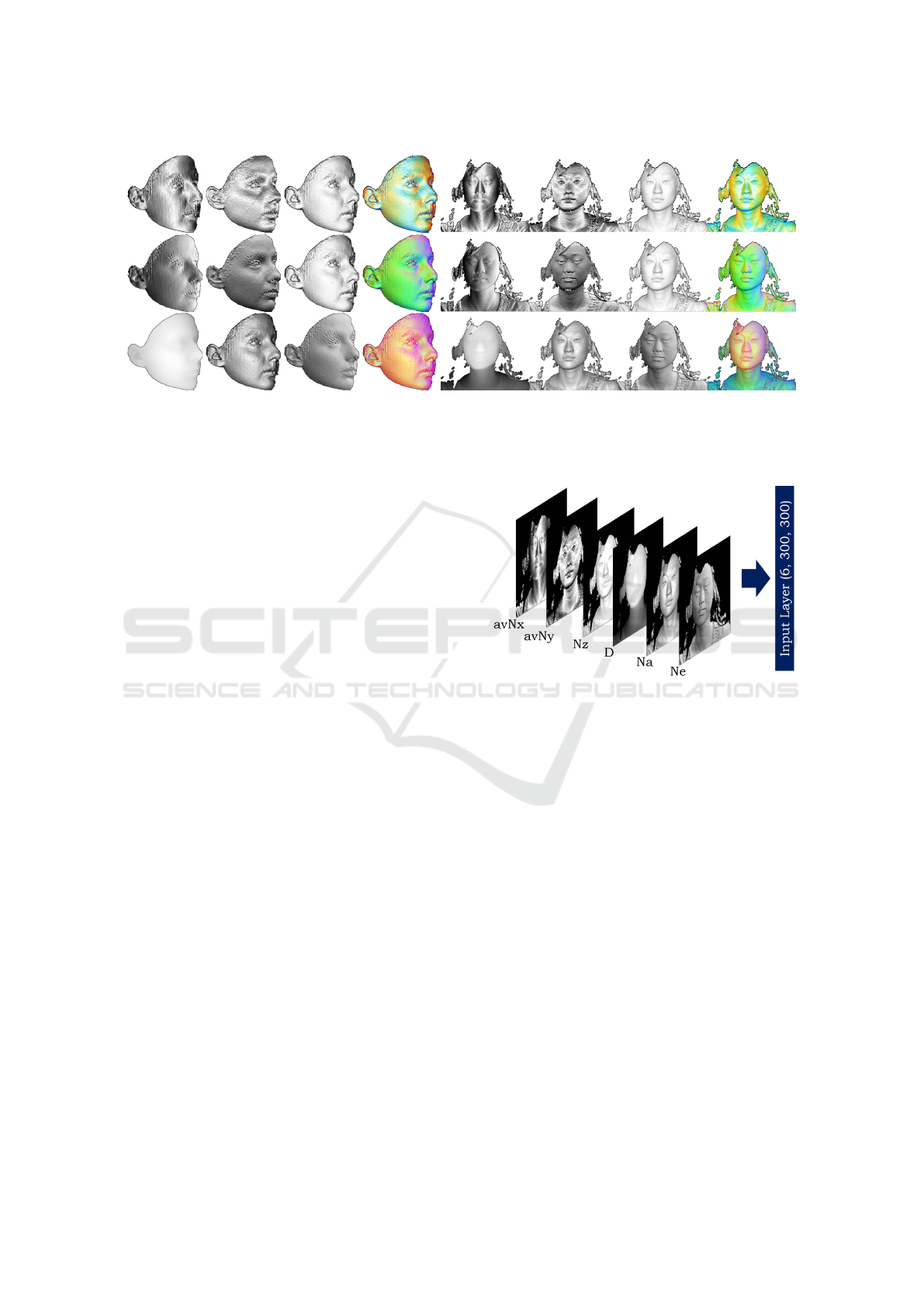
Figure 4: Example ENM set of images from Bosphorus 3D (left) and CASIA 3D (right): 1
st
row from left to right: Absolute-
Values-Normal-X-map, Absolute-Values-Normal-Y-map, Normal-Z-map, Combination of avN
x
, avN
y
, N
z
; 2
nd
row from left
to right: Normal-X-map, Normal-Y-map, Normal-Z-map, Combination of N
x
, N
y
, N
z
; 3
rd
row from left to right: depth map,
Azimuth-Normal-map, Elevation-Normal-map, Combination of depth map, N
a
, N
e
.
or absolute normal values. (e) Adjust image resolu-
tion. (f) Horizontal and vertical rotation on the mesh
for data augmentation. (g) Accessible for local de-
scribers.
4 EXPERIMENTAL EVALUATION
The datasets used in this work are CASIA, Bosphorus
and JNU-3D. The CASIA 3D FaceV1 Database con-
tains 4,674 scans of 123 subjects, where each subject
is captured with more than 35 different expressions
and poses. Bosphorus 3D Face Database comprises
105 identities and 4,666 scans and is popular because
of its rich repertoire of expressions. Beside 3D face
recognition, this database is often used for expression
recognition and facial action unit detection. The JNU-
3D data set consists of 774 3D faces and is used for
augmenting the 3D database and for accuracy tests.
Evaluation Protocol. We evaluate the depth image
and the normal maps on face recognition accuracy.
For the benchmark training the normal map size is
fixed to 300x300 since previous experiments showed
this as an efficient resolution on recognition rate and
training duration.
In total, we evaluate the accuracy with 16 different
experiments shown in fig. 4 and fig. 5 . Therefore, as a
run of the experiment we defined the basis, the ”pure”
depth map D. Followed up by the 8 different nor-
mal maps in x-dimension N
x
and avN
x
, y-dimension
N
y
and avN
y
, z-dimension N
z
and avN
z
, azimuth an-
gle N
a
and the elevation angle N
e
. Accordingly the
dimension of the network input layer is (1, 300, 300).
Figure 5: Multiple combinations of input images for the
face recogniser from single channel grey scale images up to
six channel D + avN
xy
+ N
zae
In the second run we evaluate the combination of
avN
x
, avN
y
, avN
z
, called avN
xyz
, the combination of
N
x
, N
y
, N
z
, called N
xyz
and the combination of D, N
a
, N
e
, called D + N
ae
also shown in the fig. 4. Accord-
ingly the dimension of the network input layer is (3,
300, 300).
The final run includes the combination of the
depth map and the five normal maps, called D +
N
xyzae
. Accordingly the dimension of the network
input layer is (6, 300, 300). This input for the face
recognition network is shown in fig. 5.
Each representation is trained on our face recog-
nition network for 60 epochs on Bosphorus 3D
Database, CASIA 3D and JNU-3D, respectively. On
Bosphorus, all images are used, including facial ex-
pression and partial occlusion. The first neutral sam-
ple of each subject is used as the gallery and the re-
maining scans as the probe (neutral vs. all).
Since we want to evaluate the pure 3D represen-
tations we neither apply any data augmentation meth-
ods for the training data nor use local binary pattern
Evolutional Normal Maps: 3D Face Representations for 2D-3D Face Recognition, Face Modelling and Data Augmentation
271
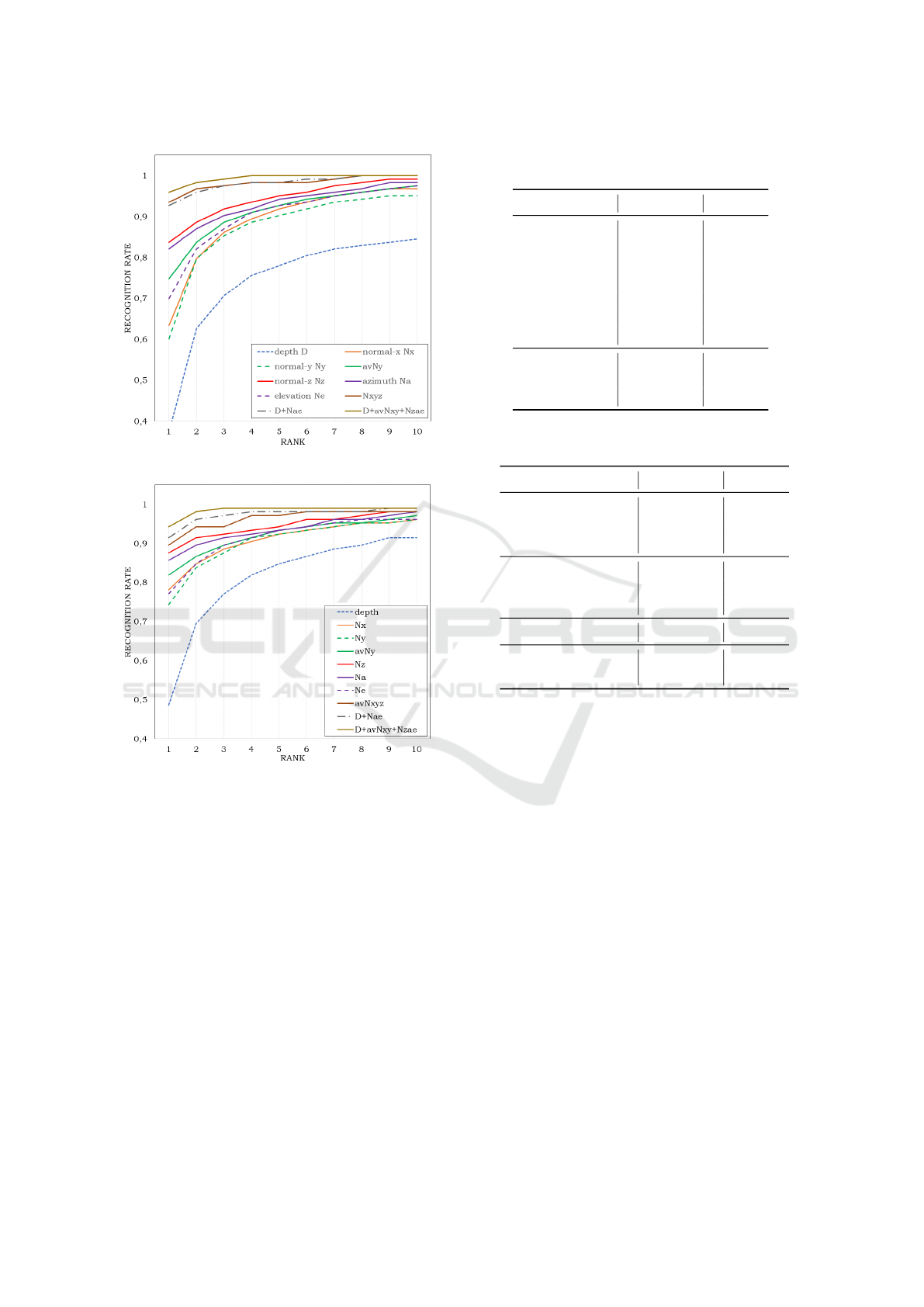
Figure 6: Recognition rate on CASIA 3D data set.
Figure 7: Recognition rate on Bosphorus 3D Face.
layers. Actually, the experiments show that with com-
bining normal maps, we are able to achieve recogni-
tion rates equal to or better than previous work with
lots of augmentation and adapted layers.
Secondary evaluation, using CASIA 3D Database,
is used under same conditions. The first scan of each
subject is considered as gallery and finally the JNU-
3D data set is used for accuracy tests on small net-
works.
Results. To illustrate recognition efficiency, the Cu-
mulative Match Characteristics (CMC) curves on CA-
SIA 3D are presented in fig. 6. Results from table 1
show our ENM achieves the best results. High detec-
tion rates in CASIA and Bosphorus are already scored
without data augmentation or the use of local binary
patterns or similar descriptors. Table 2 presents the
Table 1: Rank 1 recognition rate [%] in results on Bospho-
rus and CASIA 3D.
Bosphorus CASIA
depth map 48.6 37.4
N
x
78.1 63.4
N
y
74.3 60.2
N
z
87.6 83.7
N
a
85.7 82.1
N
e
77.1 69.9
D + N
ae
91.4 92.7
ENM avN
y
81.9 74.8
ENM avN
xyz
89.5 93.5
ENM 6-layer 94.3 95.9
Table 2: Rank 1 recognition rate [%] results on Bosphorus
and CASIA 3D with augmented data sets.
Bosphorus CASIA
GoogleNet
1
RGB 63.4 85.9
Resnet152
2
RGB 7.1 52.9
VGG-Face
3
RGB 96.4 94.1
GoogleNet 3D 26.8 50.8
Resnet152 3D 3.8 25.3
VGG-Face 3D 48.1 72.0
D + N
ae
FR3DNet
4
100.0 99.7
ENM avN
xyz
100.0 97.3
ENM 6-layer 100.0 99.8
performance of the proposed method in recognising
the 1
st
rank of the 3D faces by training with aug-
mented data. It achieves the best performance for CA-
SIA 3D faces and measures up to FR3DNet on Bosh-
porus 3D with 100% rank 1 recognition rate. The su-
periority of proposed ENM is also reflected in fig. 7.
5 CONCLUSIONS AND FUTURE
WORK
We addressed the problem of 3D face shape represen-
tation with a focus on 2D normal maps. These maps
are various functions of the 3D surface normals, that
are defined on a 3D face mesh and mapped systemat-
ically onto a 2D image. We showed that these normal
maps can be computed very efficiently from the 3D
shape mesh.
An extensive comparative evaluation of multiple
variants of these normal maps and their combinations
has been carried out using face recognition accuracy
as a measure of their effectiveness. Motivated by the
results of the comparative study, we proposed a 3D
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
272

face shape descriptor, referred to as Evolutional Nor-
mal Maps, that assimilates, modifies and optimises a
subset composed of six of these normal map represen-
tations. The proposed descriptor is extensively eval-
uated on three benchmarking 3D face datasets with
very promising results. The descriptor is computa-
tionally efficient and most importantly, it outperforms
the state of the art methods in 3D face recognition.
The proposed Evolutional Normal Maps have
many potential applications, apart from 3D face
recognition. For instance, can can be used for data
augmentation and in generative adversarial networks
to render and develop synthetic 3D data. The future
plans also include their use for 3D face reconstruc-
tion and 3D face analysis for emotion, pose and age
estimation.
ACKNOWLEDGEMENTS
Part of the research in this paper uses the CASIA-3D
FaceV1 collected by the Chinese Academy of Sci-
ences Institute of Automation (CASIA).
This work is partially supported by a grant of the
BMWi ZIM program, no. ZF4029424HB9.
REFERENCES
Abate, A. F., Nappi, M., Ricciardi, S., and Sabatino, G.
(2005). Fast 3d face recognition based on normal
map. In Proceedings of the 2005 International Con-
ference on Image Processing, ICIP 2005, Genoa,
Italy, September 11-14, 2005, pages 946–949. IEEE.
Ahonen, T., Hadid, A., and Pietik
¨
ainen, M. (2004). Face
recognition with local binary patterns. In Pajdla,
T. and Matas, J., editors, Computer Vision - ECCV
2004, 8th European Conference on Computer Vision,
Prague, Czech Republic, May 11-14, 2004. Proceed-
ings, Part I, volume 3021 of Lecture Notes in Com-
puter Science, pages 469–481. Springer.
Aleny
`
a, G., Foix, S., and Torras, C. (2014). Using tof and
RGBD cameras for 3d robot perception and manip-
ulation in human environments. Intelligent Service
Robotics, 7(4):211–220.
Aly
¨
uz, N., G
¨
okberk, B., Dibeklioglu, H., Savran, A., Salah,
A. A., Akarun, L., and Sankur, B. (2008). 3d face
recognition benchmarks on the bosphorus database
with focus on facial expressions. In Schouten, B.
A. M., Juul, N. C., Drygajlo, A., and Tistarelli, M., ed-
itors, Biometrics and Identity Management, First Eu-
ropean Workshop, BIOID 2008, Roskilde, Denmark,
May 7-9, 2008. Revised Selected Papers, volume 5372
of Lecture Notes in Computer Science, pages 57–66.
Springer.
Danner, M., Raetsch, M., Huber, P., Awais, M., Feng, Z.,
and Kittler, J. (2019). Texture-based 3D face recog-
nition using deep neural networks for unconstrained
human-machine interaction. In Proceedings of the
15th International Joint Conference on Computer Vi-
sion, Imaging and Computer Graphics Theory and
Applications VISAPP 2020. SCITEPRESS.
Daoudi, M., Srivastava, A., and Veltkamp, R. (2013). 3D
Face Modeling, Analysis and Recognition. Wiley.
Dou, P., Shah, S. K., and Kakadiaris, I. A. (2017). End-to-
end 3d face reconstruction with deep neural networks.
In 2017 IEEE Conference on Computer Vision and
Pattern Recognition, CVPR 2017, Honolulu, HI, USA,
July 21-26, 2017, pages 1503–1512. IEEE Computer
Society.
Emambakhsh, M. and Evans, A. N. (2017). Nasal patches
and curves for expression-robust 3d face recognition.
IEEE Trans. Pattern Anal. Mach. Intell., 39(5):995–
1007.
Feng, Z.-H., Huber, P., Kittler, J., Hancock, P., Wu, X.-J.,
Zhao, Q., Koppen, P., and R
¨
atsch, M. (2018). Evalua-
tion of dense 3D reconstruction from 2D face images
in the wild. In 2018 13th IEEE International Confer-
ence on Automatic Face & Gesture Recognition (FG
2018), pages 780–786. IEEE.
Gilani, S. Z. and Mian, A. (2018). Learning from mil-
lions of 3d scans for large-scale 3d face recogni-
tion. In 2018 IEEE Conference on Computer Vision
and Pattern Recognition, CVPR 2018, Salt Lake City,
UT, USA, June 18-22, 2018, pages 1896–1905. IEEE
Computer Society.
Gilani, S. Z., Mian, A. S., Shafait, F., and Reid, I. (2018).
Dense 3d face correspondence. IEEE Trans. Pattern
Anal. Mach. Intell., 40(7):1584–1598.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In 2016 IEEE Con-
ference on Computer Vision and Pattern Recognition,
CVPR 2016, Las Vegas, NV, USA, June 27-30, 2016,
pages 770–778. IEEE Computer Society.
Huang, Y., Wang, Y., and Tan, T. (2006). Combining
statistics of geometrical and correlative features for 3d
face recognition. In Chantler, M. J., Fisher, R. B.,
and Trucco, E., editors, Proceedings of the British
Machine Vision Conference 2006, Edinburgh, UK,
September 4-7, 2006, pages 879–888. British Machine
Vision Association.
Huber, P., Hu, G., Tena, J. R., Mortazavian, P., Koppen,
W. P., Christmas, W. J., R
¨
atsch, M., and Kittler, J.
(2016). A multiresolution 3D morphable face model
and fitting framework. In Magnenat-Thalmann, N.,
Richard, P., Linsen, L., Telea, A., Battiato, S., Imai,
F. H., and Braz, J., editors, Proceedings of the 11th
Joint Conference on Computer Vision, Imaging and
Computer Graphics Theory and Applications (VISI-
GRAPP 2016) - Volume 4: VISAPP, Rome, Italy,
February 27-29, 2016, pages 79–86. SciTePress.
Jafari-Khouzani, K. and Soltanian-Zadeh, H. (2005). Radon
transform orientation estimation for rotation invariant
texture analysis. IEEE Trans. Pattern Anal. Mach. In-
tell., 27(6):1004–1008.
Kakadiaris, I. A., Passalis, G., Toderici, G., Murtuza, M. N.,
and Theoharis, T. (2006). 3d face recognition. In
Evolutional Normal Maps: 3D Face Representations for 2D-3D Face Recognition, Face Modelling and Data Augmentation
273

Chantler, M. J., Fisher, R. B., and Trucco, E., edi-
tors, Proceedings of the British Machine Vision Con-
ference 2006, Edinburgh, UK, September 4-7, 2006,
pages 869–878. British Machine Vision Association.
Kakadiaris, I. A., Toderici, G., Evangelopoulos, G., Pas-
salis, G., Chu, D., Zhao, X., Shah, S. K., and Theo-
haris, T. (2017). 3d-2d face recognition with pose and
illumination normalization. Comput. Vis. Image Un-
derst., 154:137–151.
Kanade, T. (1977). Computer recognition of human faces.
Interdisciplinary Systems Research, 47.
Kittler, J., Hilton, A., Hamouz, M., and Illingworth, J.
(2005). 3d assisted face recognition: A survey of
3d imaging, modelling and recognition approachest.
In IEEE Conference on Computer Vision and Pattern
Recognition, CVPR Workshops 2005, San Diego, CA,
USA, 21-23 September, 2005, page 114. IEEE Com-
puter Society.
Kittler, J., Koppen, P., Kopp, P., Huber, P., and R
¨
atsch, M.
(2018). Conformal mapping of a 3D face representa-
tion onto a 2D image for CNN based face recognition.
In 2018 International Conference on Biometrics, ICB
2018, Gold Coast, Australia, February 20-23, 2018,
pages 124–131. IEEE.
Klasing, K., Althoff, D., Wollherr, D., and Buss, M. (2009).
Comparison of surface normal estimation methods for
range sensing applications. In 2009 IEEE Interna-
tional Conference on Robotics and Automation, ICRA
2009, Kobe, Japan, May 12-17, 2009, pages 3206–
3211. IEEE.
Koppen, W. P., Feng, Z., Kittler, J., Awais, M., Christmas,
W. J., Wu, X., and Yin, H. (2018). Gaussian mixture
3d morphable face model. Pattern Recognit., 74:617–
628.
Lazebnik, S., Schmid, C., and Ponce, J. (2005). A sparse
texture representation using local affine regions. IEEE
Trans. Pattern Anal. Mach. Intell., 27(8):1265–1278.
Li, H., Huang, D., Morvan, J., Chen, L., and Wang,
Y. (2014). Expression-robust 3d face recognition
via weighted sparse representation of multi-scale and
multi-component local normal patterns. Neurocom-
puting, 133:179–193.
Mohammadzade, H. and Hatzinakos, D. (2013). Iterative
closest normal point for 3d face recognition. IEEE
Trans. Pattern Anal. Mach. Intell., 35(2):381–397.
Ouamane, A., Boutellaa, E., Bengherabi, M., Taleb-Ahmed,
A., and Hadid, A. (2017). A novel statistical and mul-
tiscale local binary feature for 2d and 3d face verifica-
tion. Comput. Electr. Eng., 62:68–80.
Parkhi, O. M., Vedaldi, A., and Zisserman, A. (2015).
Deep face recognition. In Xie, X., Jones, M. W., and
Tam, G. K. L., editors, Proceedings of the British Ma-
chine Vision Conference 2015, BMVC 2015, Swansea,
UK, September 7-10, 2015, pages 41.1–41.12. BMVA
Press.
Pietik
¨
ainen, M., Hadid, A., Zhao, G., and Ahonen, T.
(2011). Computer Vision Using Local Binary Pat-
terns, volume 40 of Computational Imaging and Vi-
sion. Springer.
Scarselli, F., Gori, M., Tsoi, A. C., Hagenbuchner, M., and
Monfardini, G. (2009). The graph neural network
model. IEEE Trans. Neural Networks, 20(1):61–80.
Sinha, P., Balas, B. J., Ostrovsky, Y., and Russell, R.
(2006). Face recognition by humans: Nineteen results
all computer vision researchers should know about.
Proceedings of the IEEE, 94(11):1948–1962.
Soltanpour, S. and Wu, Q. J. (2019). Weighted ex-
treme sparse classifier and local derivative pattern for
3d face recognition. IEEE Trans. Image Process.,
28(6):3020–3033.
Soltanpour, S. and Wu, Q. M. J. (2017). High-order local
normal derivative pattern (LNDP) for 3d face recogni-
tion. In 2017 IEEE International Conference on Im-
age Processing, ICIP 2017, Beijing, China, September
17-20, 2017, pages 2811–2815. IEEE.
Szegedy, C., Liu, W., Jia, Y., Sermanet, P., Reed, S. E.,
Anguelov, D., Erhan, D., Vanhoucke, V., and Rabi-
novich, A. (2015). Going deeper with convolutions.
In IEEE Conference on Computer Vision and Pattern
Recognition, CVPR 2015, Boston, MA, USA, June 7-
12, 2015, pages 1–9. IEEE Computer Society.
Zhang, B., Gao, Y., Zhao, S., and Liu, J. (2010). Local
derivative pattern versus local binary pattern: Face
recognition with high-order local pattern descriptor.
IEEE Trans. Image Process., 19(2):533–544.
Zhong, C., Sun, Z., and Tan, T. (2008). Learning efficient
codes for 3d face recognition. In Proceedings of the
International Conference on Image Processing, ICIP
2008, October 12-15, 2008, San Diego, California,
USA, pages 1928–1931. IEEE.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
274
