
3D Hand and Object Pose Estimation for Real-time Human-robot
Interaction
Chaitanya Bandi
a
, Hannes Kisner and Urike Thomas
Robotics and Human-Machine Interaction Lab.,
Technical University of Chemnitz, Reichenhainer str.70, Chemnitz, Germany
Keywords:
Pose, Keypoints, Hand, Object.
Abstract:
Estimating 3D hand pose and object pose in real-time is essential for human-robot interaction scenarios like
handover of objects. Particularly in handover scenarios, many challenges need to be faced such as mutual
hand-object occlusions and the inference speed to enhance the reactiveness of robots. In this paper, we present
an approach to estimate 3D hand pose and object pose in real-time using a low-cost consumer RGB-D camera
for human-robot interaction scenarios. We propose a cascade of networks strategy to regress 2D and 3D pose
features. The first network detects the objects and hands in images. The second network is an end-to-end
model with independent weights to regress 2D keypoints of hands joints and object corners, followed by a 3D
wrist centric hand and object pose regression using a novel residual graph regression network and finally a
perspective-n-point approach to solve 6D pose of detected objects in hand. To train and evaluate our model,
we also propose a small-scale 3D hand pose dataset with a new semi-automated annotation approach using a
robot arm and demonstrate the generalizability of our model on the state-of-the-art benchmarks.
1 INTRODUCTION
Hand and object pose estimation is an active research
field for applications like robotics, augmented real-
ity, and manipulation. 3D hand pose estimation and
6D object pose estimation have been addressed inde-
pendently. Nevertheless, combined hand and object
pose estimation enhances the mutual occlusions and
this is yet to be solved for real-time applications. In
this work, we aim to introduce a pipeline to estimate
both hand pose and object pose for interaction sce-
narios. In robotics applications like bidirectional han-
dover of objects, reactiveness, reliability, and safety
are highly significant. This can be achieved by precise
estimation of fingertips and object pose in real-time.
The state-of-the-art works rely heavily on deep learn-
ing architectures for 3D hand pose estimation (Zim-
mermann and Brox, 2017; Mueller et al., 2018; Iqbal
et al., 2018; Ge et al., 2019), 6D object pose estima-
tion (Tekin et al., 2017; Peng et al., 2018; Li et al.,
2018; Wang et al., 2019; Park et al., 2019; Labb
´
e
et al., 2020; Tremblay et al., 2018), and unified hand
and object pose estimation (Doosti et al., 2020; Has-
son et al., 2019; Hasson et al., 2020; Tekin et al.,
2019).
The works (Yang et al., 2020; Rosenberger et al.,
2020) propose unique solutions for applications like
a
https://orcid.org/0000-0001-7339-8425
the handover of objects. These works rely on seg-
mentation networks to obtain the region of hands and
objects and later forward the region to the respective
grasp pose refinement model. Although the segmen-
tation networks are reliable, the inference speed is
slow without proper hardware resources.
In this paper, we present an approach to regress
3D hand pose using deep learning architecture and
compute 6D object pose estimation as illustrated in
Figure 1. The first network is an independent object
detection model to recognize the region of hands and
objects. The second network consists of two different
deep learning models that can either be trained end-
to-end or independently to infer 2D hand pose, 3D
hand pose, 2D object corners, 3D object corners and
a perspective-n-point solver for 6D object pose.
In this work, we introduce a two stream hourglass
network for 2D pose and a novel network for 3D
hand pose regression using graph convolutional net-
works. To train deep learning architectures, datasets
are highly significant and there exist quite a few
benchmarks for hand object pose estimation. Most of
the benchmarks rely on a manual annotation process
and it is quite tedious, time-consuming, and costly.
We also introduce a new semi-automatic labeling pro-
cess for 3D hand pose estimation.
770
Bandi, C., Kisner, H. and Thomas, U.
3D Hand and Object Pose Estimation for Real-time Human-robot Interaction.
DOI: 10.5220/0010902400003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 4: VISAPP, pages
770-780
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
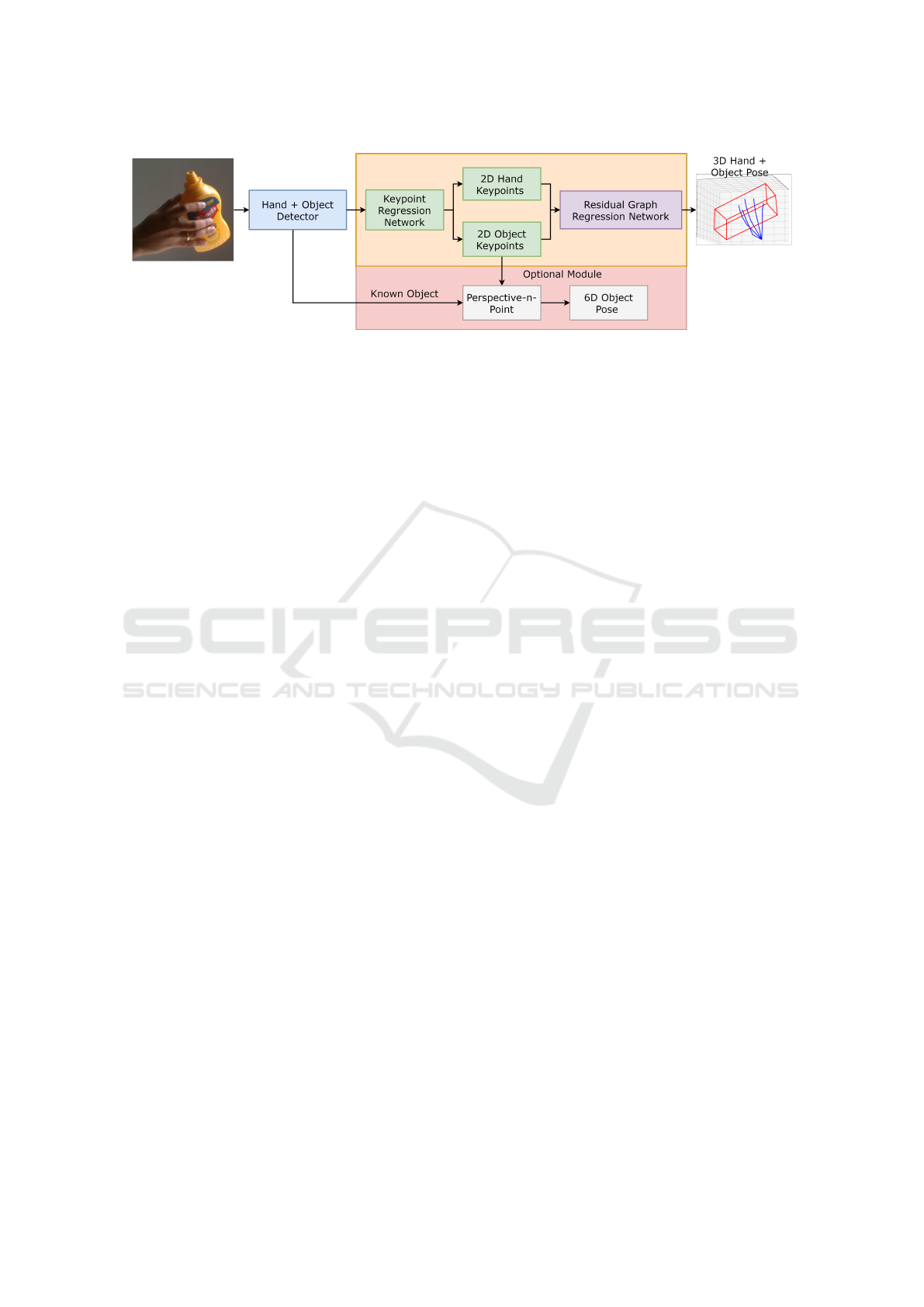
Figure 1: The overview of complete pipeline. The input is an RGB image and output is the 2D hand pose, 2D object corners,
3D object corners, 3D hand pose and an optional module to get 6D object pose using perspective-n-point algorithm.
2 RELATED WORK
In this section, we review the deep learning-based
state-of-the-art techniques for 3D hand pose estima-
tion, 6D object pose estimation, unified reconstruc-
tion of a hand-object pose, and well-known bench-
marks.
2.1 3D Hand Pose Estimation and 6D
Object Pose Estimation
The earliest work to estimate 3D hand pose using
deep learning (Zimmermann and Brox, 2017) propose
a cascaded architecture consisting of segmentation
network, pose network, and pose-prior network. Seg-
mentation network localizes the region of the hand,
the segmented region of the interest is forwarded to
pose network to obtain 2D score maps of hand joints
and finally 2D keypoints are lifted to 3D using a pose-
prior network with viewpoints. The architecture is
evaluated on the rendered hand pose dataset which
is purely synthetic and suffers from generalization is-
sues on real images. To obtain better generalization,
the work (Mueller et al., 2018) proposes a technique
that transforms the synthetic dataset such that it re-
sembles real-world images. Later, the images are for-
warded to the regression network to regress both 2D
heatmaps and 3D joint coordinates. For better gener-
alization, 3D hand kinematics are combined with con-
volutional architecture. The work (Iqbal et al., 2018)
introduces an approach that leverages depth informa-
tion in addition to RGB image. In the first stage, an
encoded-decoder network produces 2D heatmaps and
latent depth maps and in the next stage, 2D pose infor-
mation from heatmap is combined with depth maps
to obtain normalized 3D coordinates and finally re-
constructed to retain 3D pose. The direct 2D or 3D
keypoints cannot express the shape of the hand so the
work in (Ge et al., 2019) proposes graph convolu-
tional neural network-based (Graph-CNN) architec-
ture to recover the 3D mesh of the hand beside the 2D
and 3D hand pose. The architecture is tested on both
real and synthetic datasets. Based on the idea of us-
ing 2D hand pose to obtain 3D hand pose is further
exploited in these works (Bandi and Thomas, 2020;
Zhang et al., 2020).
6D Object Pose Estimation. Most of the state-of-
the-art works follow two-staged processes for 6D ob-
ject pose estimation. In the first stage, a CNN ar-
chitecture is utilized to detect the 2D keypoints of
3D projected corners and then the perspective-n-point
(PnP) (Lepetit et al., 2009) solver to compute 6D pose
features. For the first stage, (Liu et al., 2016) proposes
an architecture inspired by the YOLO model for 2D
keypoint detection and (Peng et al., 2018) presents a
pixel-wise voting scheme to further enhance the ac-
curacy of 2D keypoint detection like RANSAC. It
is possible that the detected keypoints are not com-
pletely accurate due to occlusions, which is further
refined by deep iterative matching (Li et al., 2018).
The 6D object poses for semantic grasping (Tremblay
et al., 2018) works in a similar two-staged process of
2D keypoint detection using a CNN architecture and
PnP-based object pose estimation. The model is com-
pletely trained on a synthetic dataset, generalized well
on real-world images and the model is quite simple
and applicable in real-time. Further improvement is
shown in (Wang et al., 2019) by fusing both RGB and
depth information. Pixel-wise 3D coordinate predic-
tion of objects without textured models is presented
in (Park et al., 2019) followed by PnP algorithm with
RANSAC. The Multiview multi-object pose estima-
tion (Labb
´
e et al., 2020) is very robust and it is han-
dled in three stages. In the first stage, 2D regions and
respective initial 6D object poses are obtained for all
views and then these objects are matched to recover
a single consistent view and objects in the scene and
camera poses are refined globally.
Unified Hand + Object Pose Estimation. The
3D Hand and Object Pose Estimation for Real-time Human-robot Interaction
771

Figure 2: The pipeline of the training dataset generator. A camera is attached to the tool center point (TCP) of a robot arm
and captures the scene. The current environment is included as a collision map. New camera viewpoints can be calculated
with the captured information. There are reachable viewpoints (green) and unreachable viewpoints (red) as the robot motion
is restricted. The selected center point (blue) is used for viewpoint calculation. From each reachable viewpoint, point clouds,
as well as images, can be captured and used for the semi-automatic labeling process.
single-shot neural network (Tekin et al., 2019) rec-
ognizes the 3D hand pose and 3D object pose. In
addition to 3D pose features, the network recognizes
the action performed. This network drops the idea of
computing 2D and 3D correspondences to compute
6D pose using PnP and instead results from the di-
rect 3D coordinates of the bounding box around the
3D object. For applications like the handover of ob-
jects or grasp applications, the 3D keypoint represen-
tation might be insufficient. For such application,
hand and object meshes are reconstructed (Hasson
et al., 2019). The drawback is that the architecture
trained on purely synthetic data and the retrieved ob-
ject meshes are not refined. To further improve the ac-
curacy Graph UNet (Doosti et al., 2020) based archi-
tecture is proposed. The initial 2D keypoints detec-
tions are refined using graph convolutional networks
and then adaptive UNet transforms them to 3D pre-
dictions of both hand and 3D object pose.
2.2 Hand + Object Benchmarks
There exist quite a few datasets for 3D hand pose
and 6D object pose estimation. 3D Hand pose is an-
notated on real images using manual (Sridhar et al.,
2016; Mueller et al., 2017), semi-automatic (Zim-
mermann et al., 2019), complete automatic (Simon
et al., 2017) annotation processes, and on synthetic
(Mueller et al., 2018; Zimmermann and Brox, 2017)
images using automated process. 6D object bench-
marks like LINEMOD (Hinterstoisser et al., 2012)
dataset is manually labeled, and it consists of around
1100 frames containing 15 texture-less objects. Later
a large-scale YCB video dataset (Xiang et al., 2018)
with a semi-automated annotation process for 6D ob-
ject pose estimation is introduced with 21 textured ob-
jects containing 80 video sequences for training and
12 video test videos. This dataset is widely applied in
many state-of-the-art works.
For hand object manipulations, several datasets
with hand and object pose have been proposed. (Has-
son et al., 2019) introduce an ObMan dataset with
hands grasping objects. The large-scale dataset con-
sists of 150,000 images that are synthetically gen-
erated. First-person hand action (Garcia-Hernando
et al., 2018) dataset provides hand object interaction
of daily actions with 3D hand joints and object pose.
The drawback is that the dataset is captured by attach-
ing magnetic sensors to the subject’s hand and object,
which in turn modifies the appearance features on
RGB images. Very recently HO-3D (Hampali et al.,
2019) dataset is open-sourced with hand object inter-
actions using the objects from the YCB dataset. The
dataset consists of highly occluded automatic annota-
tions, and it is very suitable for real-world hand object
interaction scenarios. The ContactPose (Brahmbhatt
et al., 2020) dataset is also a large-scale dataset con-
taining 2.9 million images of human hands grasping
objects with contact maps and this dataset is captured
using 3 Kinectv2 RGB-D cameras with known house-
hold objects with markers. In (Ye et al., 2021), object
handovers from human to human is extensively eval-
uated and also introduces a dataset with 18k handover
videos.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
772

3 SEMI AUTOMATIC TRAINING
INSTANCES
The hand pose estimation depends on the quality of
training data from the environment, e.g. a higher data
variety increases robustness. If data with later used
camera sensors exist, the performance increases in a
real-world scenario. However, the creation of labeled
training data is tedious and time-consuming so we
automatize parts of the process to decrease creation
time. For this purpose, we need sensors to detect cam-
era poses, as well as a concept for camera movements.
This leads to the idea of using a robot arm and attach-
ing a camera to it. The following section describes the
setup and the data creation pipeline in more detail.
3.1 Scenario Setup
We need to change and measure camera poses, as flex-
ible and accurate as possible, to ensure a high train-
ing data quality. Thus, our pipeline is based on a
robot arm and a RGB-D camera sensor. The robot
shall move the camera to different poses to get dif-
ferent viewing angles while measuring the position of
the camera. The TCP of the robot includes maximum
freedom of movement and thus we attach a camera
near to it. (The exact camera pose is determined by
robot sensors and a camera calibration which has to
be executed beforehand. Furthermore, the robot has
to know its environment to guarantee collision free-
ness. Thus, our robot controller includes a static map
of the environment. Furthermore, the current camera
view is added to the collision map. However, more
details on collision maps and robot control are out of
the scope of this work.
3.2 Pipeline
Our semi automatized dataset creation pipeline con-
sists of two main stages. The first stage is used to
capture images and generate new camera poses. The
saved data is forwarded to the second stage, a post-
processing pipeline that uses all captured informa-
tion to generate training data. Figure 2 visualizes the
pipeline with a sample scenario.
3.2.1 Move and Capture
At first, we put the object of interest near the robot
and align the camera to the object
1
. We want to gen-
erate landmarks for hand-tracking, thus our object of
1
We assume the object and the robot to be placed in
free space, to guarantee that the robot can move around it
(considering the movability limitations of the robot).
interest is a human hand. After the first captured im-
age and pose, the hand has to stay as static as possible
2
. Now, a computer transforms the captured infor-
mation into a visualizer using the robot frame as the
origin. An external operator uses a GUI to set a point
as the center point for the next camera viewpoints.
Next, the object with respect to the center point has
to be captured from different viewing angles. How-
ever, we could use random camera poses. Instead, we
need a predictable motion of the robot to increase the
safety level. We define a sphere with the initial cam-
era pose. The resulting sphere corresponds to a set of
infinite viewpoints around the center point. We dis-
cretize the viewpoints using a pre-defined angle dis-
tance, e.g. 10
◦
. The resulting points are the next cam-
era poses in world coordinates. The pipeline captures
for each of the viewpoints the coordinates of the cam-
era as well as a 3D point cloud. The camera pose is
used to transform the information into the robot coor-
dinate system; respectively all point clouds are trans-
formed into the same coordinate system leading to a
stitched point cloud. Next, we post-process the cap-
tured data.
3.2.2 Post Processing
The post-processing uses the point clouds, captured
2D images as well as camera transformations as in-
put data. Additionally, a template of desired land-
marks is required. It is not guaranteed that all land-
marks are visible in each image, e.g. restricted cam-
era view angle, occluded by objects. We overcome
hidden landmarks by displaying the complete aligned
point cloud in a GUI as we need exact training data.
Thus, an external expert has to pick in the GUI initial
landmarks, e.g. the fingertips, in the aligned cloud
concerning the pre-defined landmark template. The
selection results in a set of point indices, that are set
as ground truth information. From that, the algorithm
iterates through the captured point clouds and cam-
era poses. We search for each ground-truth the cor-
responding point in the specific point cloud and set
the extracted indices as the landmark. However, if
the euclidean distance between the ground truth point
and the new landmark is larger than the threshold
τ = 0.05cm, we define the landmark as 0 correspond-
ing to an occluded or invisible point. The algorithm
outputs a 3D point cloud, a corresponding 2D image,
the indices as well as the positions of the landmarks in
2D and 3D. We name our dataset as robot arm semi-
automatic hand dataset (RASH). Adding ground truth
data for bounding boxes differs from the normal land-
2
Proposing an external fixation device or something
similar is out of scope of this work.
3D Hand and Object Pose Estimation for Real-time Human-robot Interaction
773
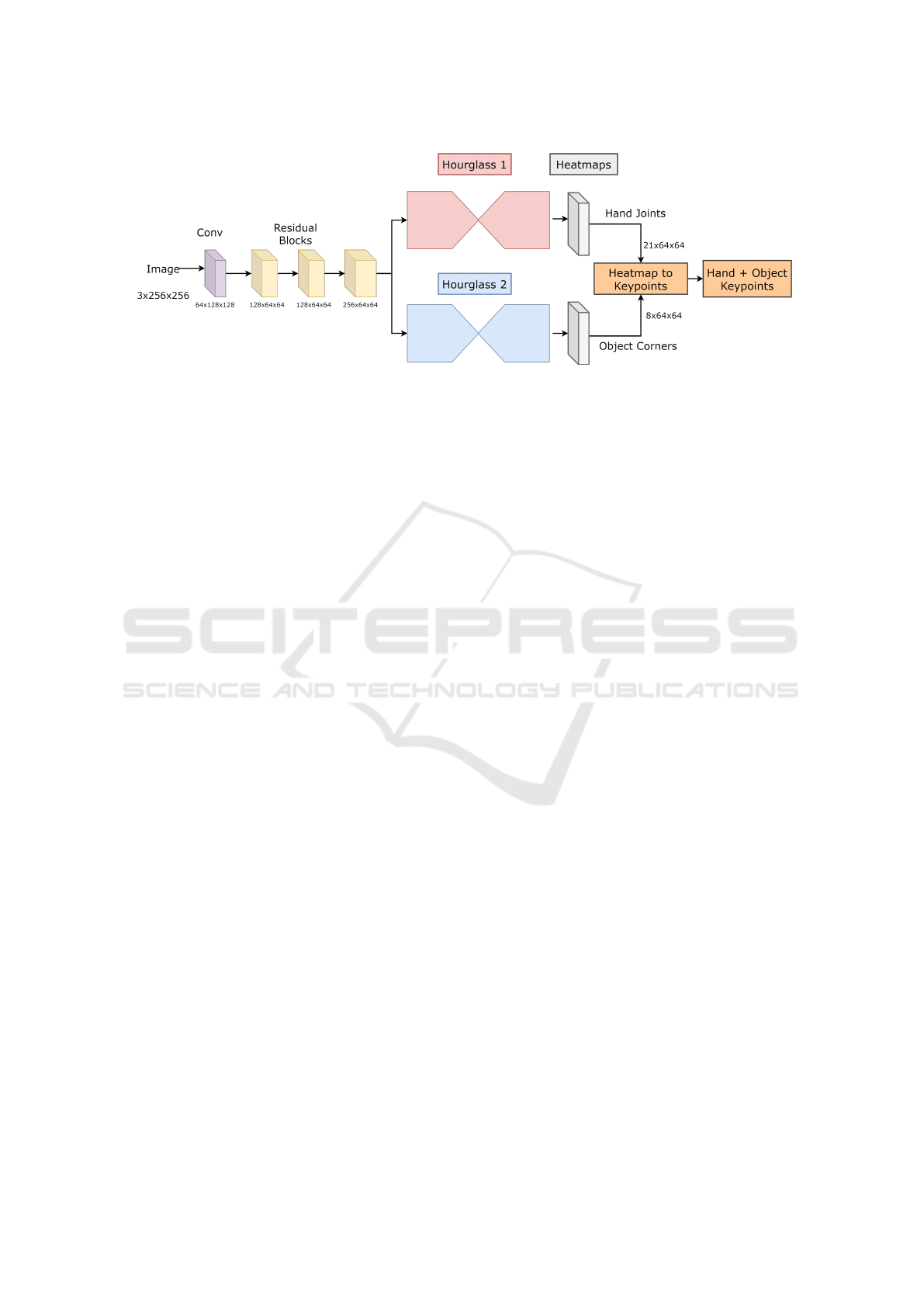
Figure 3: The architecture of 2D hand pose and 2D object corner regression using heatmaps.
marks as selecting bounding boxes in point clouds is
not intuitive. We use 2D images of the initial cloud
for selecting 2D bounding boxes. However, we need
to add depth information, to convert 2D box informa-
tion into 3D. Therefore, the depth of the object has to
be predefined, e.g. a hand has a size of about 20cm.
The 2D box relates to a set of indices corresponding
to 3D points. We select the nearest point from the
extracted points and add the pre-defined object size.
Thus, the external operator selects x and y coordinates
of the bounding box edges, and the depth is automati-
cally added. The bounding box edges can be similarly
used as ground truth landmarks. Using this setup, we
capture 12000 hand instances which allows maximum
error of 0.5mm for training the network.
4 METHODOLOGY
In this section, we introduce the architecture for
3D hand pose regression and object pose estimation.
Given an RGB image I = R
height×width×3
, we regress
2D Hand pose P
2D
= R
21×2
, 2D object keypoints
O
2D
= R
8×2
, 3D hand pose of size P
2D
= R
21×3
and
3D object keypoints O
3D
= R
8×3
.
4.1 Hand + Object Detection
Initially, we consider an independent object detec-
tion model to detect hands and known objects that
are used in the interaction environment. The ob-
ject detection architectures are widely researched for
many real-time applications and there exist one staged
(Bochkovskiy et al., 2020; Liu et al., 2016) and two-
staged models (Dai et al., 2016) with distinct back-
bones either for GPU (He et al., 2015) or for CPU
platforms (Sandler et al., 2018). In this work, we
reuse the well-known YOLOv4 (Bochkovskiy et al.,
2020) architecture with MobileNet (Sandler et al.,
2018) backbone for training the region of hands and
objects. As the network is quite fast and it does not
affect the speed of the cascaded network.
4.2 2D Hand Pose and Object Keypoints
Once the region of hand and object is detected, we
pass the cropped region to heatmap regression net-
work (HRN) to estimate the 21 hand joints and 8 ob-
ject corners. To regress keypoints using heatmaps,
an encoder-decoder or hourglass based architecture is
considered. The hourglass based model with resid-
uals introduced in (Newell et al., 2016) works well
for human pose estimation and later adopted to hand
based keypoint regression models. Based on that, we
introduce a two-stream hourglass model to regress
heatmaps of hand and object joints. The HRN is
clearly depicted in Figure 3. As the RGB image
contains both hand and object, we extract common
features using convolutions and residuals (He et al.,
2015). Later, the information is shared to hourglass
1 to extract hand joint heatmaps and hourglass 2
to extract object corners. The network features be-
fore hourglass are 3 × 256 × 256 → conv(64 × 128 ×
128) → residual(128 × 64 × 64) → residual(128 ×
64 × 64) → residual(256 × 64 × 64)). The features
are directly passed through two hourglass models
without further processing to extract heatmaps of
hand joints and object corners. From the network,
we obtain 21 heatmaps for each hand and 8 heatmaps
for each object present in the image. Each heatmap
consists of one joint with size of 64 × 64. The lo-
cation of keypoint is the location of maximum value
exists in the heatmap and the maximum location is
converted to orginal image size by multipying it with
4 (i.e., 64 × 4 = 256). An example of heatmaps is
shown in Figure 5.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
774

Figure 4: The architecture of residual graph regression network for 3D pose regression.
4.3 Residual Graph Regression
Network (RGRN)
We will revisit briefly the concept of GCNs as pro-
posed in (Kipf and Welling, 2016). The aim is to
learn features on a graph structure data and convolu-
tional filters are shared across all graph locations. The
graph structure is represented in the form of an adja-
cency matrix A ∈ K × K , where K is the number of
input nodes. The input features of every node are rep-
resented in the form of a feature matrix K ×H, where
H is the input features. The output features f (H, A) of
each layer l are obtained by multiplying the adjacency
matrix with input nodes and trainable weights W , and
features are then passed to non-linear functions like
ReLU(Agarap, 2019).
f (H
(l)
, A) = σ(AH
(l)
W
(l)
) (1)
As our hand model is in the form of a graph, we
use basic building blocks of graph convolutions and
combine them with residual connections (He et al.,
2015). To learn the graph structure, we use the pre-
defined kinematic structure of hand and object joints
as an adjacency matrix to the graph network. Given
2D keypoints of shape, 29 × 2 as input, each graph
convolution output 256 features and the final output
layer regress 29 × 3 features i.e., the 3D coordinates
of the hand pose and object pose. The output of each
graph convolution is normalized and passed through
ReLU (Agarap, 2019) non-linear function. As the
input features are wrist-centric (i.e., the wrist joint
is (0,0,0)), we also introduce bias during training.
The purple block in Figure 4 represents the RGRN
model for 3D hand pose regression. As the num-
Figure 5: An example of 64 × 64 heatmap of each joint.
ber of residual layers N is not fixed, we experiment
with the value of N during the training process for
best performance. Each block consists of graph con-
volution operation and the network layers are as fol-
lows 21 × 2 → 21×256 → N − Residual(21 ×256 →
21 × 256) → 21 × 256 → N − Residual(21 × 256 →
21 × 256) → 21 × 3. See Section 7 for training and
validation stability.
4.4 Network Loss
To train a model, we must compute loss for backprop-
agation, the heatmap loss for 2D hand pose l
hand2D
,
the 2D object corner l
ob j2D
, and the pose loss for 3D
hand pose l
hand3D
and 3D object corner pose l
ob j3D
.
For both 2D and 3D loss computation, mean squared
error (MSE) loss is utilized. The individual loss com-
putation is
l
n
= ||groundtruth − predicted||
2
(2)
Where n is l
hand2D
, l
ob j2D
, l
hand3D
, and l
ob j3D
.
The overall heatmap loss L
heatmap
for 2D heatmap
regression network is computed as
L
heatmap
= l
hand2D
+ l
ob j2D
(3)
The overall 3D pose loss L
hand3D+Ob ject3D
is com-
puted as
L
hand3D+Ob ject3D
= l
hand3D
+ l
ob j3D
(4)
5 EXPERIMENTS
5.1 Datasets
In this section, we extensively experiment with model
hyperparameters and test the generalizability of the
proposed model on two open source datasets in which
HO3D dataset (Hampali et al., 2019) contains both
hand manipulating objects, FreiHand dataset (Zim-
mermann et al., 2019) contains hand pose with self-
occlusions, and RASH dataset: 1) HO-3D dataset
(Hampali et al., 2019): as the dataset contains both
hand and object annotations. HO-3D dataset contains
3D Hand and Object Pose Estimation for Real-time Human-robot Interaction
775
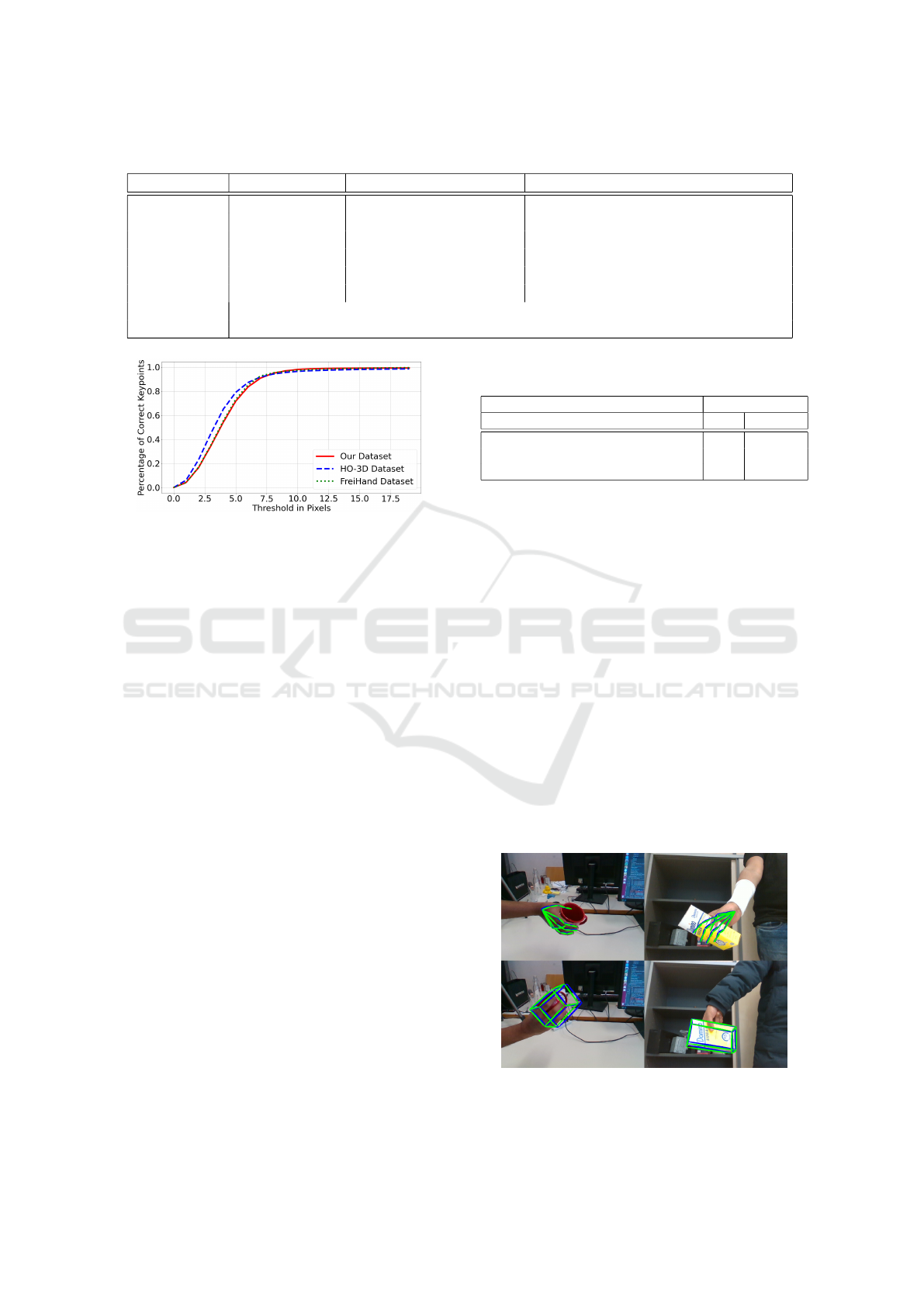
Table 1: Training Parameters.
Parameter Object Detector 2D Hand and Object Pose 3D Hand and Object Pose
Network YOLOv4 Hourglass RGRN
Input size 416 × 416 256 × 256 29 × 2
Output Bounding Box 64 × 64 × 21 + 8 × 2 29 × 3
Epochs 120 200 200
Learning rate 0.0001 0.0001 0.0001/0.001
Optimizer Adam RMSprop RMSprop/Adam(Kingma and Ba, 2017)
Framework PyTorch
GPU Nvidia RTX 2060 Super
Figure 6: The percentage of correct keypoints of 2D hand
pose on three different datasets.
hands manipulating objects. Although the dataset
consists of 77,558 samples only 66,034 samples are
available with full hand annotations. So, we ran-
domly split such that 50,000 samples are used for
training, 16,325 samples for validation purposes and
the remaining 11,524 unlabeled data for evaluation.
The process of hand-object labelling (Hampali et al.,
2019) is completely automated with less initialization
constraints. 2) FreiHand dataset (Zimmermann et al.,
2019) is a semi-automatic annotated hand dataset con-
sisting of over 32,000 training samples and 4,000 test
samples. Although the dataset is highly occluded, no
object pose annotations are present. 3) RASH dataset
is a small-scale hand dataset captured using Panda
robot arm consisting of 10,000 training instances and
2,000 test samples. The images are captured us-
ing Intel Realsense 415 camera with a resolution of
640 × 480 pixels.
5.2 Evaluation Metrics, Training
Parameters, and Results
We evaluate the performance of 2D pose, and 3D pose
using three different metrics:
1) The mean distance error between the predicted
keypoints and the groundtruth. 2) Percentage of cor-
rect keypoints (PCK) is an exceedingly popular evalu-
ation metric for both 2D and 3D pose. PCK considers
a keypoint as correct if it falls under a certain thresh-
old, with pixel value threshold for 2D and millimeter
Table 2: Evaluation of euclidean position error (EPE) in
millimeters on validation set.
Dataset Residual blocks
N=2 N=3
HO-3D (Hampali et al., 2019) 13.4 9.2
FreiHand (Zimmermann et al., 2019) 13.2 8.8
Ours (RAH) 10.1 8.2
distance for 3D around the ground truth. 3) The area
under the curve (AUC) of the PCK graph computed
for a threshold of 50mm.
The complete training parameters are listed in Ta-
ble 1 and the models are trained independently de-
pending on the dataset. We evaluate the proposed
model by experimenting with hyperparameters such
that the best possible accuracy is acheived. In addi-
tion to training hyperparameters, we need to consider
the architecture parameters like number of stacks and
hidden layers.
5.2.1 2D Hand and Object Pose
For 2D hand pose estimation, we consider PCK eval-
uation metric and it is plotted in Figure 6. On HO-3D
(Hampali et al., 2019) validation dataset the value of
PCK @ 10 pixel is ≈ 0.969 and on RASH dataset
PCK@10 pixel is ≈ 0.986. The difference is due to
the high occlusion in HO-3D (Hampali et al., 2019)
Figure 7: The 2D hand pose and object pose outputs.The
green lines represent groundtruth and the blue lines indicate
predicted keypoints.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
776
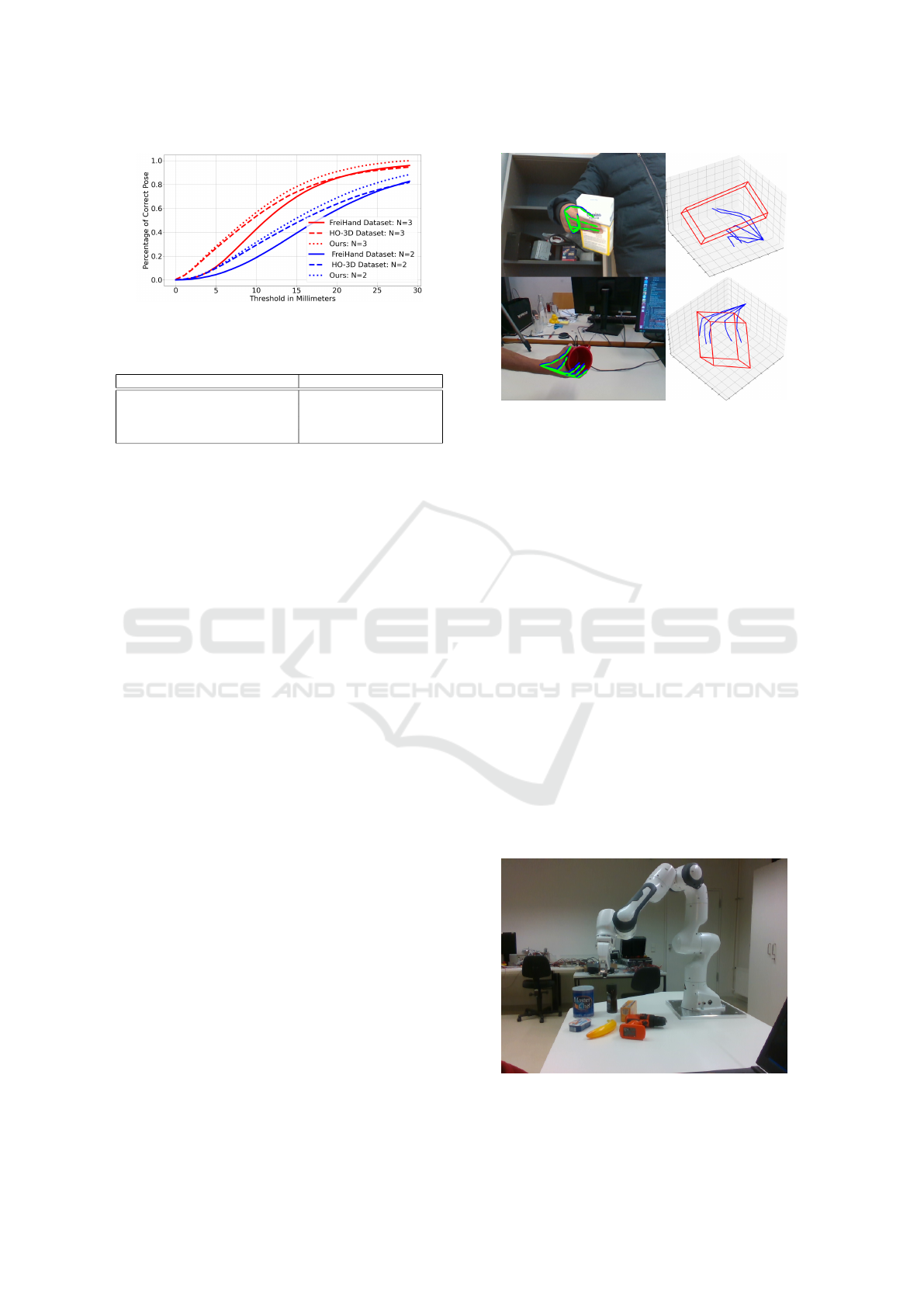
Figure 8: Percentage of correct keypoints (PCK) evaluation
of 3D Hand pose.
Table 3: Comparison to the state-of-the-art.
Method Area Under Curve (AUC) %
HO-3D (Hampali et al., 2019) 79.0
FreiHand (Zimmermann et al., 2019) 79.1
Ours on HO-3D 79.4
Ours on FreiHand 84.2
dataset compared to RASH dataset. Similarly, 2D
PCK of object keypoints on HO-3D dataset is ≈ 0.9
for 10 pixel threshold. The 2D hand and object pose
on HO3D validation samples can be observed in Fig-
ure 7.
5.2.2 3D Hand and Object Pose
We train the 2D pose and 3D pose networks inde-
pendently without sharing the weights. RGRN (see
Figure 4) has hyperparameter N that determines num-
ber of hidden residual layers. The network is trained
by setting the value of N to 2 and 3. The 3D PCK
graph is represented in Figure 8. From the graph, we
can clearly observe that by increasing the number of
hidden layers performance is improved. In addition
to PCK metric, we evaluate mean euclidean 3D po-
sition error (EPE) by setting N = 2 and N = 3. The
EPE for HO-3D (Hampali et al., 2019) dataset, Frei-
Hand dataset (Zimmermann et al., 2019), and RASH
dataset is represented in Table 2. Few results on vali-
dation dataset are mentioned in Figure 9. Finally, we
test the accuracy of our proposed model on HO-3D
(Hampali et al., 2019) and FreiHand dataset (Zim-
mermann et al., 2019) datasets and compare it to the
state-of-the art. For testing the accuracy on unlabeled
data, we have to follow the instructions by (Hampali
et al., 2019) to submit the outputs to a submission
board. The Table 3 represents the AUC in percentage
computation of 3D PCK curve with the threshold of
50mm and we can clearly see that the architecure per-
forms well. Although the architecture performs better
on both the datasets, the AUC computation of Con-
tactPose(Brahmbhatt et al., 2020) dataset has shown
to be even higher and the difference is due to the fact
that the hand mesh (3D MANO) (Romero et al., 2017)
models are used to estimate the keypoint errors and in
this work we use direct 3D regression.
Figure 9: 3D hand and object pose on HO3D validation
samples.
5.3 Discussion and RASH Dataset
In robotics, there exist applications like handover of
objects from humans to robots and viceversa. In this
work, our aim is to build an architecture that is suit-
able for bidirectional handover applications. As the
image resolution and occlusions are higher in HO-3D
dataset, we first trained proposed model completely
on HO-3D dataset and evaluated in human-robot in-
teraction environment as in Figure 10. The resulting
3D hand pose and 2D hand pose in human-robot in-
teraction environment can be oberved in Figure 11.
By just using HO-3D dataset in our environment, we
noticed that the 3D hand pose have high errors when
there is no object in the hand (see Figure 11, left im-
age with 3D and 2D). Figure 11 right image repre-
sents hand with object in the human robot interaction
environment. Although HO-3D dataset is a large-
scale and highly occluded dataset, it does not con-
tain enough instances for hands without objects. To
make our architecture work well for bidirectional han-
dovers, we collected our own dataset known as RASH
Figure 10: Human-robot interaction environment for han-
dover of objects.
3D Hand and Object Pose Estimation for Real-time Human-robot Interaction
777

Figure 11: Test ouputs in human-robot interaction environment; model trained on HO3D dataset.
Figure 12: Hand and object pose estimation in human-robot interaction environment.
dataset. The dataset consists of mostly open hand im-
ages with very low occlusions. To enchance the per-
formance, we combined training instances of HO-3D
dataset with RASH dataset and retrained the proposed
model. The Figure 12 represents the few pose sam-
ples of hands without objects and hands manipulat-
ing objects in human-robot interaction environment.
From that we noticed a significant improvement for
3D hand poses (hands without objects). The number
of parameters in the complete architecture adds upto
20.26 million. During the processs of training, we
utilize Nvidia 1080 Ti graphical processor with 12 gi-
gabyte memory. For inference, we use Nvidia 1660
Ti processor with 6 gigabyte memory. The complete
pipeline acheived a framerate of ≈ 16 fps on single
GPU without visualization. It is further possible to
improve the framerate by reducing the stacks in hour-
glass but it compromises the accuracy of 2D keypoint
estimation. For real-time applications, the training
dataset must be highly occluded. To test this pro-
posed pipeline in real-world application, we retrained
the model by combining HO-3D dataset and RASH
dataset. To avoid the tedious process of manual la-
belling, we opt for a semi automatic labelling and we
are also currently working on fully automated annota-
tion process using robot arm without any constraints.
6 CONCLUSIONS
We proposed a complete pipeline to regress 2D pose,
3D hand pose and object pose. The 2D hand pose is
estimated using hourglass architecture and the inter-
mediate features from 2D hourglass network is further
extended to regress the object keypoints in the image.
To regress 3D hand pose from 2D hand pose, we in-
troduced a residual graph regression network with N
residual connections and achieved best performance
for N = 3. We evaluated the proposed network with
three different metrics on three different datasets. We
will further focus on improving the object keypoint
regression, accuracy of training instances and forward
the obtained information to a grasp planner for real-
time handover of object interactions.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
778

ACKNOWLEDGEMENTS
This work is Funded by the Deutsche Forschungs-
gemeinschaft (DFG, German Research Foundation) -
Project-ID 416228727 - SFB 1410.
REFERENCES
Agarap, A. F. (2019). Deep learning using rectified linear
units (relu).
Bandi, C. and Thomas, U. (2020). Regression-based 3d
hand pose estimation using heatmaps. In Proceedings
of the 15th International Joint Conference on Com-
puter Vision, Imaging and Computer Graphics Theory
and Applications - Volume 5: VISAPP,, pages 636–
643. INSTICC, SciTePress.
Bochkovskiy, A., Wang, C., and Liao, H. M. (2020).
Yolov4: Optimal speed and accuracy of object detec-
tion. CoRR, abs/2004.10934.
Brahmbhatt, S., Tang, C., Twigg, C. D., Kemp, C. C., and
Hays, J. (2020). ContactPose: A dataset of grasps
with object contact and hand pose. In The European
Conference on Computer Vision (ECCV).
Dai, J., Li, Y., He, K., and Sun, J. (2016). R-fcn: Object de-
tection via region-based fully convolutional networks.
Doosti, B., Naha, S., Mirbagheri, M., and Crandall, D. J.
(2020). Hope-net: A graph-based model for hand-
object pose estimation. CoRR, abs/2004.00060.
Garcia-Hernando, G., Yuan, S., Baek, S., and Kim, T.-
K. (2018). First-person hand action benchmark with
rgb-d videos and 3d hand pose annotations. In Pro-
ceedings of Computer Vision and Pattern Recognition
(CVPR).
Ge, L., Ren, Z., Li, Y., Xue, Z., Wang, Y., Cai, J., and Yuan,
J. (2019). 3d hand shape and pose estimation from a
single RGB image. CoRR, abs/1903.00812.
Hampali, S., Oberweger, M., Rad, M., and Lepetit, V.
(2019). HO-3D: A multi-user, multi-object dataset
for joint 3d hand-object pose estimation. CoRR,
abs/1907.01481.
Hasson, Y., Tekin, B., Bogo, F., Laptev, I., Pollefeys, M.,
and Schmid, C. (2020). Leveraging photometric con-
sistency over time for sparsely supervised hand-object
reconstruction. CoRR, abs/2004.13449.
Hasson, Y., Varol, G., Tzionas, D., Kalevatykh, I., Black,
M. J., Laptev, I., and Schmid, C. (2019). Learning
joint reconstruction of hands and manipulated objects.
CoRR, abs/1904.05767.
He, K., Zhang, X., Ren, S., and Sun, J. (2015). Deep
residual learning for image recognition. CoRR,
abs/1512.03385.
Hinterstoisser, S., Lepetit, V., Ilic, S., Holzer, S., Bradski,
G., Konolige, K., and Navab, N. (2012). Model based
training, detection and pose estimation of texture-less
3d objects in heavily cluttered scenes. In Proceedings
of the 11th Asian Conference on Computer Vision -
Volume Part I, ACCV’12, page 548–562, Berlin, Hei-
delberg. Springer-Verlag.
Iqbal, U., Molchanov, P., Breuel, T., Gall, J., and Kautz, J.
(2018). Hand pose estimation via latent 2.5d heatmap
regression. CoRR, abs/1804.09534.
Kingma, D. P. and Ba, J. (2017). Adam: A method for
stochastic optimization.
Kipf, T. N. and Welling, M. (2016). Semi-supervised clas-
sification with graph convolutional networks. CoRR,
abs/1609.02907.
Labb
´
e, Y., Carpentier, J., Aubry, M., and Sivic, J. (2020).
Cosypose: Consistent multi-view multi-object 6d
pose estimation. CoRR, abs/2008.08465.
Lepetit, V., Moreno-Noguer, F., and Fua, P. (2009). Epnp:
An accurate o(n) solution to the pnp problem. Int. J.
Comput. Vision, 81(2):155–166.
Li, Y., Wang, G., Ji, X., Xiang, Y., and Fox, D. (2018).
Deepim: Deep iterative matching for 6d pose estima-
tion. CoRR, abs/1804.00175.
Liu, W., Anguelov, D., Erhan, D., Szegedy, C., Reed, S.,
Fu, C.-Y., and Berg, A. C. (2016). Ssd: Single shot
multibox detector. Lecture Notes in Computer Sci-
ence, page 21–37.
Mueller, F., Bernard, F., Sotnychenko, O., Mehta, D., Srid-
har, S., Casas, D., and Theobalt, C. (2018). Ganerated
hands for real-time 3d hand tracking from monocular
rgb. In Proceedings of Computer Vision and Pattern
Recognition (CVPR).
Mueller, F., Mehta, D., Sotnychenko, O., Sridhar, S., Casas,
D., and Theobalt, C. (2017). Real-time hand track-
ing under occlusion from an egocentric rgb-d sensor.
In Proceedings of International Conference on Com-
puter Vision (ICCV).
Newell, A., Yang, K., and Deng, J. (2016). Stacked hour-
glass networks for human pose estimation. CoRR,
abs/1603.06937.
Park, K., Patten, T., and Vincze, M. (2019). Pix2pose:
Pixel-wise coordinate regression of objects for 6d
pose estimation. CoRR, abs/1908.07433.
Peng, S., Liu, Y., Huang, Q., Bao, H., and Zhou, X. (2018).
Pvnet: Pixel-wise voting network for 6dof pose esti-
mation. CoRR, abs/1812.11788.
Romero, J., Tzionas, D., and Black, M. J. (2017). Embod-
ied hands: Modeling and capturing hands and bodies
together. ACM Transactions on Graphics, (Proc. SIG-
GRAPH Asia), 36(6):245:1–245:17.
Rosenberger, P., Cosgun, A., Newbury, R., Kwan, J.,
Ortenzi, V., Corke, P., and Grafinger, M. (2020).
Object-independent human-to-robot handovers using
real time robotic vision. CoRR, abs/2006.01797.
Sandler, M., Howard, A. G., Zhu, M., Zhmoginov, A., and
Chen, L. (2018). Inverted residuals and linear bottle-
necks: Mobile networks for classification, detection
and segmentation. CoRR, abs/1801.04381.
Simon, T., Joo, H., Matthews, I. A., and Sheikh, Y. (2017).
Hand keypoint detection in single images using mul-
tiview bootstrapping. CoRR, abs/1704.07809.
Sridhar, S., Mueller, F., Zollhoefer, M., Casas, D.,
Oulasvirta, A., and Theobalt, C. (2016). Real-time
joint tracking of a hand manipulating an object from
rgb-d input. In Proceedings of European Conference
on Computer Vision (ECCV).
3D Hand and Object Pose Estimation for Real-time Human-robot Interaction
779
Tekin, B., Bogo, F., and Pollefeys, M. (2019). H+O: unified
egocentric recognition of 3d hand-object poses and in-
teractions. CoRR, abs/1904.05349.
Tekin, B., Sinha, S. N., and Fua, P. (2017). Real-time
seamless single shot 6d object pose prediction. CoRR,
abs/1711.08848.
Tremblay, J., To, T., Sundaralingam, B., Xiang, Y., Fox,
D., and Birchfield, S. (2018). Deep object pose es-
timation for semantic robotic grasping of household
objects. CoRR, abs/1809.10790.
Wang, C., Xu, D., Zhu, Y., Mart
´
ın-Mart
´
ın, R., Lu, C., Fei-
Fei, L., and Savarese, S. (2019). Densefusion: 6d ob-
ject pose estimation by iterative dense fusion. CoRR,
abs/1901.04780.
Xiang, Y., Schmidt, T., Narayanan, V., and Fox, D. (2018).
Posecnn: A convolutional neural network for 6d ob-
ject pose estimation in cluttered scenes.
Yang, W., Paxton, C., Mousavian, A., Chao, Y., Cakmak,
M., and Fox, D. (2020). Reactive human-to-robot han-
dovers of arbitrary objects. CoRR, abs/2011.08961.
Ye, R., Xu, W., Xue, Z., Tang, T., Wang, Y., and Lu, C.
(2021). H2O: A benchmark for visual human-human
object handover analysis. CoRR, abs/2104.11466.
Zhang, Y., Chen, L., Liu, Y., Zheng, W., and Yong, J.
(2020). Explicit knowledge distillation for 3d hand
pose estimation from monocular rgb. In BMVC.
Zimmermann, C. and Brox, T. (2017). Learning to estimate
3d hand pose from single rgb images. In IEEE In-
ternational Conference on Computer Vision (ICCV).
https://arxiv.org/abs/1705.01389.
Zimmermann, C., Ceylan, D., Yang, J., Russell, B. C., Ar-
gus, M., and Brox, T. (2019). Freihand: A dataset
for markerless capture of hand pose and shape from
single RGB images. CoRR, abs/1909.04349.
APPENDIX
Pipeline for Handover of Objects. In human-robot
interaction environment, it is possible that only hand
is present in the scene. As the network designed in
Figure 13: The architecture for bidirectional handovers.
section 4 is for both hand and object images, we in-
cluded another stream if only hand is present in the
scene. The overall pipeline can be observed in Fig-
ure 13.
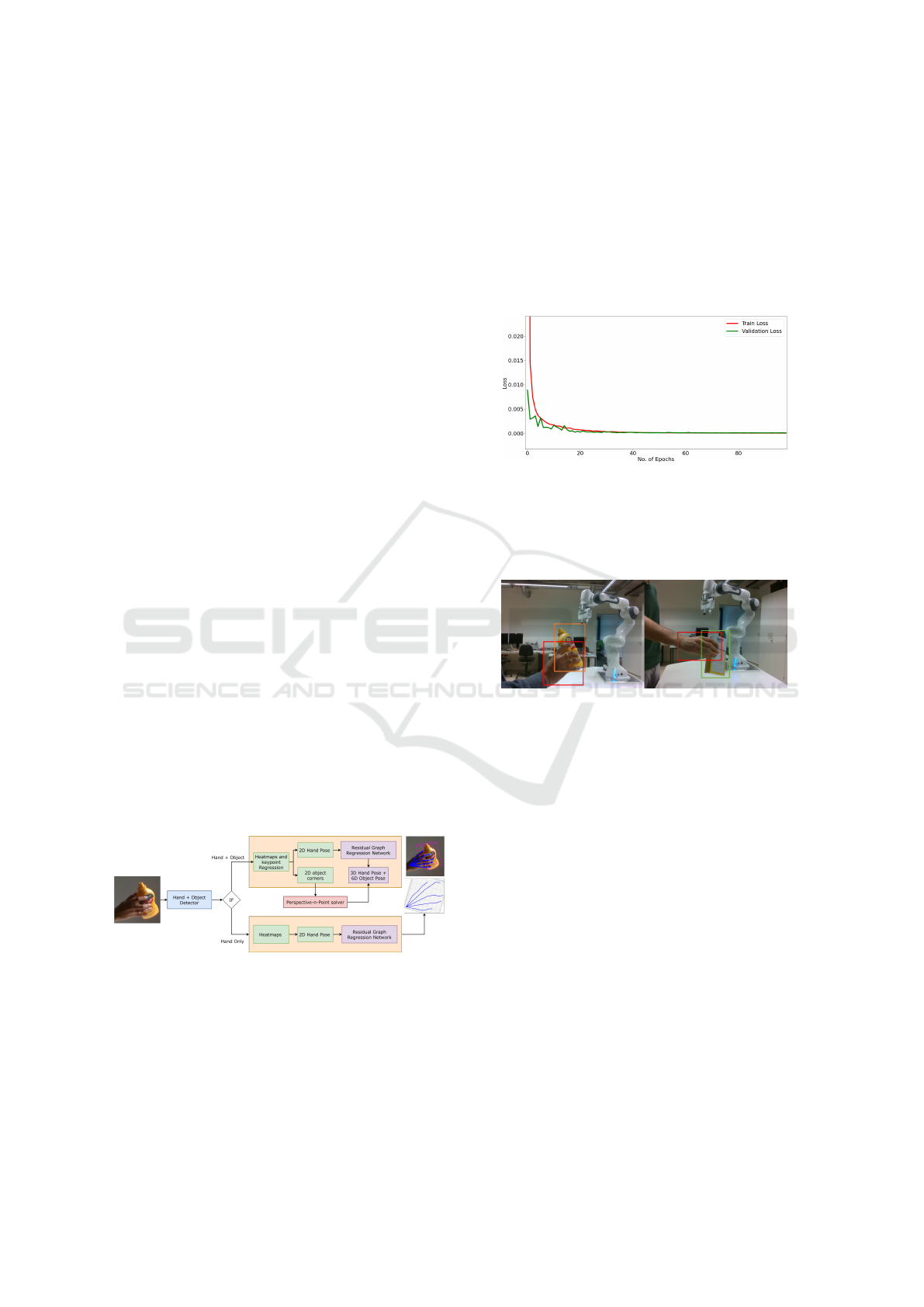
Training and Validation Loss. The training and vali-
dation loss of the proposed RGRN architecture can be
seen in Figure 14. From the Figure, we can clearly no-
tice the stability of both training and validation loss.
Figure 14: Training and validation loss of RGRN architec-
ture.
Detection Output. The output of YOLOv4
(Bochkovskiy et al., 2020) on hands and objects can
be observed in Figure 15.
Figure 15: The outputs of YOLOv4 architecture for hand
and object detection.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
780
