
Neuranimation: Reactive Character Animations with Deep Neural
Networks
Sebastian Silva, Sergio Sugahara and Willy Ugarte
a
Universidad Peruana de Ciencias Aplicadas (UPC), Lima, Peru
Keywords:
Neural Networks, Locomotion, Human Motion, Character Animation, Character Control, Deep Learning.
Abstract:
The increasing need for more realistic animations has resulted in the implementation of various systems that
try to overcome this issue by controlling the character at a base level based on complex techniques. In our
work we are using a Phase Functioned Neural Network for generating the next pose of the character in real
time while making a comparison with a modified version of the model. The current basic model lacks the
ability of producing reactive animations with objects of their surrounding but only reacts to the terrain the
character is standing on. Therefore, adding a layer of Rigs with Inverse Kinematics and Blending Trees will
allow us to switch between actions depending on the object and adjust the character to fit properly. Our results
showed that our proposal improves significantly previous results and that inverse kinematics is essential for
this improvement.
1 INTRODUCTION
Due to the constant growth of the entertainment soft-
ware industry and the further development in com-
puter graphics and artificial intelligence, big compa-
nies, such as EA
1
and Ubisoft
2
, are investing in Ma-
chine Learning driven systems to generate complex
animations. Because of this, machine learning meth-
ods have been applied to various activities as walking,
running and climbing. Nevertheless, those techniques
are only attainable by great corporations that possess
a motion capture studio. Thus, smaller independent
studios recur to traditional methods that mostly do not
have a significant presence in the creation of fluid ani-
mations accordingly to the objects in the environment
in which the character is.
The field of computer animation dedicated to char-
acter animations is rapidly increasing the develop-
ment of animation systems that can help with the de-
velopment of complex 3D worlds in the video game
industry. In addition, the entertainment software in-
dustry is constantly growing, just in the United States,
according to the Entertainment Software Association
(ESA)
3
, the American software industry revenue im-
a
https://orcid.org/0000-0002-7510-618X
1
Frostbite presents at GDC and SIGGRAPH - EA
2
Ubisoft La Forge - Ubisoft
3
Video Games Generated $35.4 Billion in Revenue for
2019 in The U.S. - ESA
proved a 2% from 2018 to 2019.
This conditions make the animators more valuable
for the development of a game of great quality in im-
portant companies standards. Therefore, the indepen-
dent game developers and startups will have to pay
salaries up to $33,000 a year
4
for a single animator.
Evenmore, animating characters could be a hard
problem since humans exhibit a fluidity in the actions
they perform that is difficult to replicate by computer
in real time, resulting in simple and unrealistic transi-
tions between actions. Typically, animations for hu-
mans are captured from real humans using techniques
such as motion capture or manually edited using key
frames and interpolation curves, this methods as ex-
pensive and time-consuming. Furthermore, the ani-
mations of humanoid characters are especially diffi-
cult to control, since they present complex dynamic
movements, not a clear start and a high index of de-
grees of freedom(DoF). Therefore, one of the goals of
computer animation and the computer graphics area is
to be able to generate animations with algorithms.
Many solutions have arisen proposing different
methods to control a character by changing their
joints properties to select the next pose accordingly
to the action intended, methods such as physics-based
models (Park et al., 2019; Hwang et al., 2018), motion
matching (Holden et al., 2020) or time-series mod-
els (Starke et al., 2019; Holden et al., 2017). Although
4
3D Animation Salaries - Glassdoor
252
Silva, S., Sugahara, S. and Ugarte, W.
Neuranimation: Reactive Character Animations with Deep Neural Networks.
DOI: 10.5220/0010896500003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 1: GRAPP, pages
252-259
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

many methods had achieved fluid motions, like walk-
ing and running (Bergamin et al., 2019; Harvey and
Pal, 2018), they respond mostly only to the terrain the
character is standing on. On the other hand, some
deep learning models are able to recognize environ-
ment objects and interact with them (Starke et al.,
2019; Holden et al., 2020), but the actions are in-
corporated in the model so whenever new actions are
needed the model needs to be retrained every time.
Thus, we propose a mixed approach of deep learning
with traditional methods to generate character anima-
tions and interactions.
To overcome this issue and make it more acces-
sible, we use a Phase Functioned Neural Network
(PFNN) (Holden et al., 2017) for basic states of lo-
comotion, since it brings more freedom to the user,
and an animation blending process on top of the net-
work for animation transitioning to different custom
actions. Our work is limited to adding animations for
the character to do, depending on the object it inter-
acts with, by switching or mixing the PFNN output
with a pre-recorded animation, we utilize Unity3D
built-in components for physics, collisions and ani-
mations control, as well as an animation rigging li-
brary, for ease of use.
Our main contributions are as follows:
• We develop an implementation of PFNN with an
interaction system on top with assignable anima-
tions as needed.
• We propose the use of animation blend transitions
with inverse kinematics for pose correction.
• We present an analysis of our method and a com-
parison with state-of-the-art approaches.
This paper is organized as follows. Section 2
discusses related works. Section 3 introduces rele-
vant concepts, defines the problem and presents our
approach. Section 4 shows a experimental study to
prove the feasibility of our approach, then, we con-
clude the paper.
2 RELATED WORKS
In (Holden et al., 2017), the authors propose a novel
framework for the synthesis of movements called
Phase-Functioned Neural Network. In contrast to
other movement synthesis networks, this uses a par-
ticular time variable called Phase that is represented
by a Phase function as seen in equation 1. In this arti-
cle they used the Catmull-Rom Cubic Spline function
and changed the values of the weights and biases of
the network depending on the current phase.
On the other hand, our work utilizes the PFNN to
generate basic motion in real time. Nevertheless, we
added a simple to use interaction generation system
based on Inverse Kinematics (IK) to extend the reach
of the PFNN in a simple matter.
Motion Matching is a character animation tech-
nique that dependends on a lot of data, and a set
of algorithms that search the best suited animation
for the next frame. (Holden et al., 2020) propose a
state of the art mixed system, using the base of Mo-
tion Matching process, including the following algo-
rithms:
1. Compressor: overcomes the need of storing the
rotation and translation of the articulations of
character, by generating them using only the pa-
rameters of the articulations of the character.
2. Stepper: generates a delta that aids the production
of the next frame.
3. Projector: Finds the next most suitable step for the
animation using K nearest neighbours.
In the article, the authors describe the usage of 4
different neural networks to replace certain steps of
the algorithms, concluding in a more efficient Neural
Network approach to Motion Matching. Our method
describes a mixed approach such as Learned Motion
Matching, with a clear difference, the integration of
our method can be described as superficial, adding a
layer of interactivity to the known PFNN. In contrast
with Learn Motion Matching, our method does not
need to train to add more interactions neither store the
animation database in the application to generate the
animations.
In (Zhang et al., 2018), the authors propose the
usage of the output of one network (named Gating
Network) as blending coefficients of expert weights to
determine the dynamic weights for the Motion Predic-
tion Network, in contrast to the PFNN which weights
are calculated with a phase function. This gating net-
works allows the character to switch or blend different
locomotion phases according to the user input and ter-
rain variations the character is standing on. However,
our method uses the PFNN since it require less data
to train and can be stored in little space. In addition
to this, the MANN needed the expert weights of each
desired action so that they could blend.
In (Starke et al., 2019), the authors use a neural
network to determine which action (states), or blend
of actions, is needed in the next frame by detecting the
surrounding through many voxels around the charac-
ter in a cylindrical area, as well as the interaction to
objects being a voxelization projection of its shape,
adding to the network inputs along side the desired
motion and character pose given by the user. Similar
Neuranimation: Reactive Character Animations with Deep Neural Networks
253

to MANN, it uses a Gating Network and Motion Pre-
diction Network in sequence. In contrast, our method
controls the interactions on top of the network’s out-
put by blending the generated pose with a new as-
signed action by correcting the pose thanks to vari-
ous animation rigging calculations, instead of detect-
ing the object before hand and acknowledging them to
the network, allowing the user to add as many actions
as needed without the need of training a new model
with another state.
3 KINEMATICS AND DEEP
LEARNING FOR ANIMATION
3.1 Preliminary Concepts
The generation of animations of complex characters,
like humans, presents different challenges to com-
puter graphics. This problems include, but are not
limited to the management of multiple degrees of
freedom, the natural motions required for a anima-
tion, the generation in real time of animations, and
others. In the following sections, we present some of
the approaches other took.
3.1.1 Character Animation
Key Frame Animation. According to
Lever (Lever, 2001), animation appears as a se-
ries of static images changing rapidly, with the
purpose of giving a sensation of movement of the
presented images. When animating in modern
software, we present a character that can be moved
in a virtual space, this movements are made by the
animator.
Most of the times, this movements can be created
by interpolating two different positions and rotations
of a articulation of the character. The process of creat-
ing positions and rotations for interpolation is known
as Key Frame Animation.
A basic usage of Key frame animations can be
seen with the Unity 3D animator when creating a new
animation, the user can access to the animation time-
line, adding key frames that reference a value, like
position or rotation. When the user creates multiple
key frames, the engine does the interpolation between
these key frames, resulting in a simple animation.
MoCap Animation. According to Kitagawa and
Windsor (Kitagawa and Windsor, 2020) Motion Cap-
ture or MoCap can be defined as the sampling an
recording of human motion, animals or inanimate ob-
jects as three dimensional data. We can use motion
capture data to model the movements that out char-
acter will present in the animation. This movements
can be incorporated by adding the animation or using
a more complex approach such as Motion Matching.
Holden, Kanoun, Perepichka and Popa (Holden
et al., 2020), showed that in Motion Matching, for
every N frames the algorithm searches the database
containing the Motion Data and finds the motion that
best matches the current state and animation of the
character. If an animation that has a lower cost than
the current one is found, then a transition is inserted
between the current step of the animation an the next
animation.
Animation Blending. In (M
´
enardais et al., 2004),
the authors mentioned the process to blend anima-
tions from short clips to get new longer animations by
combining and looping said clips. This process, ani-
mation blending, is able to generate more fluid transi-
tion between different actions or a fusion of them (in
case they can be overlapped). This is accomplished
by having different animations and coefficients which
determine how much of each animation it takes and
thus generating the intermediate poses accordingly.
3.1.2 Character Kinematics
Kinematics describe the rotations and translations of
points, objects or group of objects without consider-
ing what causes the motion nor physics properties like
mass, forces, torque or any other reference.
Most virtual articulated models are complicated
consisting in many joints, thus having a high number
of degrees of freedom (DoFs) that have to undergone
many transformations to achieve a desired pose.
In addition, they are required to satisfy a number
of constraints that include joint restrictions so they act
naturally, as well as, target nodes or end effectors to
indicate where is aimed to end.
Forward Kinematic (FK). Since the characters
joints are composed in a hierarchical manner, a way
to handle this complexity to create a pose and ensur-
ing some coherence, is by manually adjusting all the
DoFs by carefully modifying their rotations so one
joint moves its children joints accordingly, this pro-
cess is also known as Forward Kinematics (FK) where
each joints transformation is adjusted, most likely in
a local space of the previous joint.
For instance, to animate an arm with a fixed shoul-
der, the position of the tip of the thumb would be
then calculated from the angles of the shoulder, el-
bow, wrist, thumb and knuckle joints, taking into ac-
count all of their DoFs (Kucuk and Bingul, 2006).
GRAPP 2022 - 17th International Conference on Computer Graphics Theory and Applications
254

Figure 1: Forward and Inverse Kinematics Operations
5
.
Inverse Kinematics (IK). It has become one of the
main techniques to manipulate motion data as find-
ing more efficient ways to manipulate the articulated
models had become a necessity. IK allows to animate
a model by adjusting only the end effectors (usually
end effectors are control points, commonly placed at
the distal portion of the limbs, such as feet or hands),
this end effectors position and orientation are often
determined by the animator or a MoCap reference.
Thanks to IK the rest of DoFs from parent nodes
are automatically determined following different cri-
teria (specified by the model constraints) according to
the position of the end effector in world space, saving
lots of work to the animator while still having control
of it and creating a coherent pose (Aristidou et al.,
2018). Fig. 1 depicts an example of FK and IK.
3.1.3 Deep Learning Animation Generation
Mixed Methods. This methods depend on different
algorithms or methods for animation. Some examples
for these methods are the following:
• Learned Motion Matching: Holden et al. (Holden
et al., 2020) describes the usage of four Deep
Neural Networks inside of Decompressor, Stepper
and Projector Algorithms that are used in standard
Motion Matching System for animations.
• DeepLoco: Peng, Berseth, Yin and Van De
Panne (Peng et al., 2017) developed a Deep Re-
inforcement Learning approach to the animation
of bipedal locomotion that highly depends of the
Physics constraints added by the physics system.
Deep Neural Networks. In deep neural network
approaches, the motion is generated as an output of
one or more neural networks, each one of them exe-
cuting a precise task depending on the network.
(Holden et al., 2017) implemented a single net-
work with a phase function, this approach allows the
character to monitor and change the weights of the
5
Inverse Kinematics
network depending on the current phase. The phase
function provides a simple solution to the reactive
animation generation. This approach is known as
Phased-Function Neural Network (henceforth noted
by PFNN).
(Zhang et al., 2018) provided a method with
no phase function that presented good results with
quadruped characters. This approach depends on a
Gating Network that finds a animation suited for the
next step in a group of animations.
This Gating network can be seen in the work of
Starke, Zhang, Komura and Saito (Starke et al., 2019),
where the Gating Network is used in conjunction with
a motion prediction network and four encoders that
help the animation to generate a interaction with an
object.
3.2 Animation Package Development
For the development of a Unity package capable of
switching between animations with every user input
or character-object interaction we proposed a charac-
ter controlled PFNN for movement in every direction
adapting to terrain variations and different types of
movement (i.e. crouching or running) and applying
the animation rigs necessary when interacting with
object to correct the pose of the character.
3.2.1 PFNN for Character Basic Animations
In this section, we first describe the Phase Function,
the layers used in the model and the training process.
This Model is based and shares the Phase Function
with the work presented by (Holden et al., 2017).
Phase Function. The phase function, as described
by (Holden et al., 2017), computes a set of values
called α that will be used by the network to gener-
ate the next pose in each frame. The phase function
is represented by α = Θ(p, β) (Holden et al., 2017),
where p is the current Phase and β are the parame-
ters.
The phase function can be any type of function or
even another Neural Network, but for this project we
used the Cubic Catmull-Rom Spline as a cyclic func-
tion, this requires that the start and the end control
points be in the same place, as seen in the Fig. 2.
We use the Catmull-Rom Spline as the phase func-
tion, because of the cyclic behaviour described be-
fore, and, as pointed by (Holden et al., 2017), the
function with the best performance for PFNN was
Catmull-Rom Cubic Spline, which presents four con-
trol points.
Neuranimation: Reactive Character Animations with Deep Neural Networks
255

Figure 2: Graphic representation of Catmull-Rom Cubic
Spline as a Cyclic Function.
Each control point α
k
represents a set of weights
in the neural network, this control points are use as
in the Phase Function as β = {α
0
, α
1
, α
2
, α
3
}. The
generation of the values to be used in this frame for a
arbitrary p can be express as follows:
Θ(p;β) = α
k
1
+ w(
1
2
α
k
2
−
1
2
α
k
0
)
+ w
2
(α
k
0
−
5
2
α
k
1
+ 2α
k
2
−
1
2
α
k
3
)
+ w
3
(
3
2
α
k
1
−
3
2
α
k
2
+
1
2
α
k
3
−
1
2
α
k
0
)
Where w =
4p
2π
(mod 1)
k
n
=
4p
2π
+ (n − 1)(mod 4)
(1)
Model Structure. The PFNN model depends on the
quantity of control points that are present in the sub-
section 3.2.1. Therefore, every layer in the model
will present a configuration of four sets of weights
and bias. The structure we used can be represented as
a three layer model with 512 units for layers zero and
one, and 311 for layer two.
For the activator of the layers we used Exponen-
tial rectified linear function activator(ELU). The neu-
ral network Θ (Holden et al., 2017) can be repre-
sented as:
Φ(x, a) = W
2
ELU(W
1
ELU(W
0
x + b
0
) + b
1
) + b
2
(2)
where :
ELU = max(x, 0) + exp(min(x, 0)) − 1 (3)
Where W
k
and b
k
is the network parameters re-
turned by the phase function Θ as seen in Equation 1.
Training. For the training we take each frame x and
its next frame y and the current phase p and create
three matrices as X = [x
0
, x
1
, ...], Y = [y
0
, y
1
, ...] and
P = [p
0
, p
1
, ...]. We calculate the mean and standard
deviation of X and Y and normalized the data.
For the loss function of the model we used Mean
Square Error and for the optimization, stochastic gra-
dient descend algorithm (Kingma and Ba, 2014). For
the construction and training of the model we used
Tensorflow 2, with keras custom layers and models.
We included Dropout layers with a retention proba-
bility of .7 and trained using batches of size 32. The
training was performed with 10 epochs in about 12
hours in a Tesla P100.
3.2.2 Character Animation Rigging
For having a better control over the character we ap-
plied motion rigs to its skeleton defining many refer-
ential constraints between different parts of the limbs,
torso, root node, etc. for the purpose of maintaining a
correct anatomy and avoiding muscles contracting to
the wrong direction.
As well as, adding two-bone IK constraints to the
limbs, specifying the three nodes that compose them
(i.e. shoulder, elbow and wrist for arms) and assign-
ing new target nodes for a simple re-positioning of
the distal portion of the limbs (hands and feet) by re-
orientating the two upper nodes for the distal node to
match the target.
Thus allowing us to override the limbs animations
for a pose correction or to move them independently
to do a certain action (i.e. grabbing a door knob to
open it). In Addition, by having IK constraints only
applied to the limbs, the root node of the character
(most likely the Hips) can be controlled separately
and, thanks to the pose correction, have a full body
control.
3.2.3 System Overview
In this section we will discuss how all of this was inte-
grated together in Unity 3D thanks to its built-in prop-
erties and how our system works step-by-step as seen
in Fig. 3.
Incorporation to Unity 3D. To accomplish the task
of generating reactive animations we utilize Unity 3D
because of its various embedded systems, including
hierarchical Game Objects, Transformations, Rigid
bodies, collisions and the Animation Rigging pack-
age developed for it.
Thanks to the mentioned systems we had the capa-
bility of building a hierarchical skeleton composition
making possible the use of FK to create traditional
animations for specific actions and to use the skele-
ton joints Transformation properties as input for the
GRAPP 2022 - 17th International Conference on Computer Graphics Theory and Applications
256
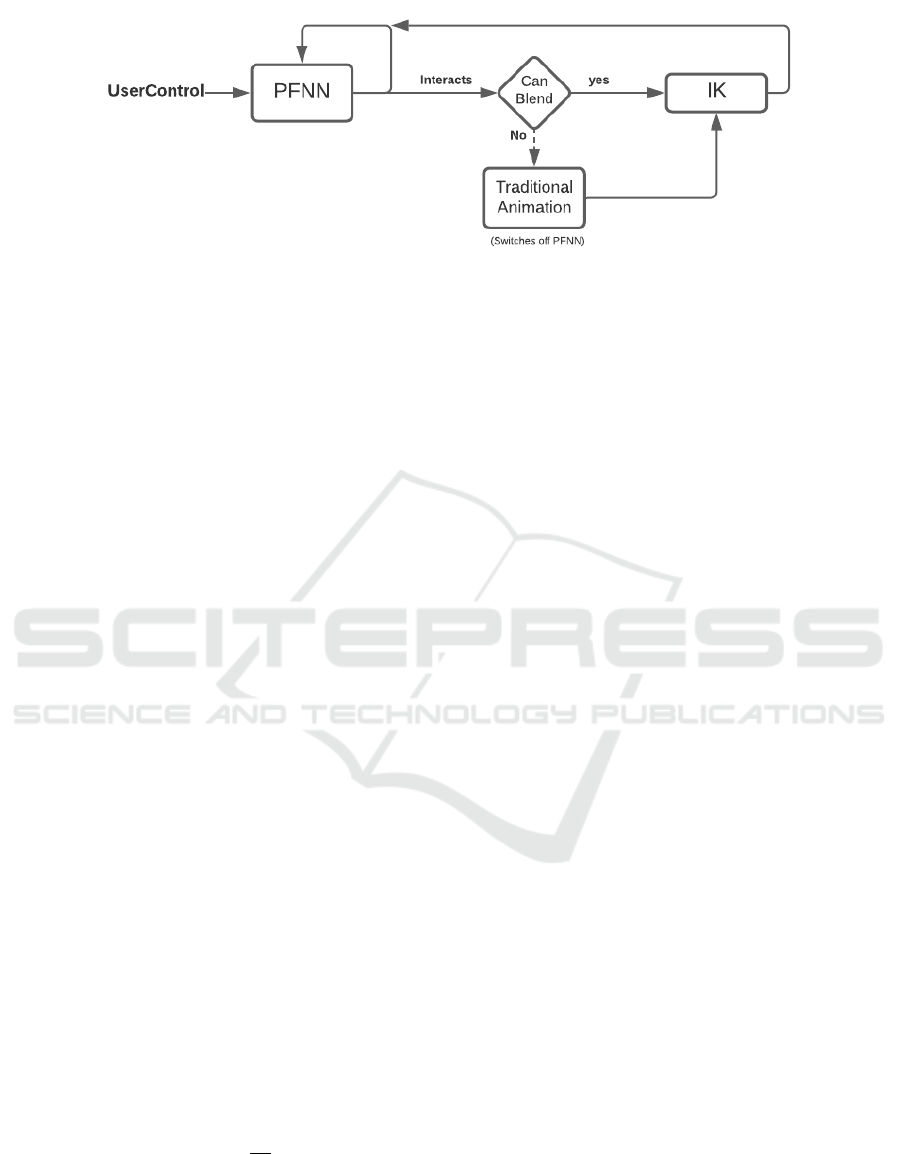
Figure 3: Graphic representation of how our system works.
PFNN which is built from a collection of binary files
containing the weights and biases.
Furthermore, the rigid body and collisions system
allows the detection and identification of the objects
the character is interacting with. By this method, it
can be determined which action to perform in each
scenario since not all animations where incorporated
within the possible PFNN outputs.
A way of switching back and forth between tra-
ditional animation and generating poses from a Deep
Learning model to adjust to the action needed. There-
fore, interactions that cannot be blended with the gen-
erated poses can still be performed by the character
(i.e. sitting on a chair) by defining which animation to
play when colliding with each object. Because of this,
animation blending was integrated to take the output
of the network and the corresponding action to play
making a transition between pre-recorded animations
and the model generated ones.
In addition to this, a whole scenario was created
consisting different types of objects (a door and two
chairs), a rugged terrain section and a movable object
to test the performance of the character to different
interactions. Notably, the PFNN excels at generat-
ing free movements in different locomotion phases,
moreover, it adapts to the variations of the terrain its
standing on (i.e. hiking a steep slope or trotting down
hill).
Frame Pose Calculation. In each frame, if the
PFNN is active, the script takes the joints properties,
trajectory and current Phase for the following calcu-
lations. Then, the joint properties and trajectory are
normalized. Afterwards, we use the Phase p to gener-
ate the index of the weights that are going to be use,
described as follows:
index = 50
p
2π
(4)
After that, we run the neural network with the weights
and biases that correspond to the calculated index. Fi-
nally, we re-normalize the result and update the model
and the phase. If the humanoid character interacts
with an object, the rigs that correspond to said ob-
ject are activated and the pose correction is done by
the IK functions described in section 3.2.2.
4 EXPERIMENTS
In this section we will discuss the experiments our
project has undergone, as well as, what is needed to
replicate said experiments and a discussion of the re-
sults obtained after this process.
4.1 Experimental Protocol
To recreate the process of building, training and test-
ing the model utilized in our project, we begin to de-
scribe what was needed to accomplish such task.
4.1.1 Development Environment
The environment used as our main platform where
all our models were trained was Google Colaboratory
Pro which provides us a total RAM of 25GB and a
Tesla T4 or a Tesla P100 GPU, including the Tensor-
flow 2 and Keras libraries. Also having Google One,
the first tier subscription, for up to 100 GB of storage
space in Google Drive. Additionally, the game engine
Unity 3D 2020.3.16f1 for the different objects (hier-
archy and orientation properties) and physics systems
(collisions and rigidbodies).
4.1.2 Dataset
The dataset was built from the scripts provided by
Holden along side his PFNN article (Holden et al.,
2017) which process many motion capture clips to
obtain the joint properties of the person recorded and
generating three numpy arrays, corresponding to the
input data as X, the output data as Y and the current
phase as P.
This numpy arrays are compressed and stored in
a .npz file as a collection, in which the X is saved as
Neuranimation: Reactive Character Animations with Deep Neural Networks
257

Table 1: RAM Consumption of the different projects that
generate reactive animations.
Project RAM
PFNN Adam (Holden et al., 2017) 1,034 MB
PFNN Original (Holden et al., 2017) 1,545 MB
NSM (Starke et al., 2019) 1,657 MB
Neuranimation (Ours) 1,237 MB
Xun, Y, as Yun and P, as Pun. The size of his .npz file
is about 6.80 GB, containing 4,353,570 tuples of 342
features in Xun, 311 features in Yun and one feature
in Pun.
4.1.3 Models Training
All model architectures were trained in Google Colab
Pro utilizing Tensorflow 2 in a virtual GPU environ-
ment with extended RAM as seen in Section 4.1.1,
with a 24 hour maximum run-time, for 10 epochs us-
ing batches of 32 tuples from the dataset, with the
Adam optimizer and trying to minimize the loss value
obtained with a Mean Square Error function, aver-
aging 52 minutes per epoch. By having all mod-
els undergone the same training process we can ana-
lyze how they behave and the learning tendencies they
take, all model took around nine hours to train.
4.1.4 Testing Environment
To qualify the performance of the models, we con-
sider the loss function as the main metric to minimize
during training. To preview the results of the gen-
erated poses we have created a Unity 3D demo play-
ground scene, where a model can be loaded from their
weights and biases saved in binary files. There we de-
termine how realistic the model is generating poses in
a qualitative manner, while measuring running perfor-
mance (in RAM) to compare it with similar Unity 3D
methods.
4.1.5 Source Code
Our code and dataset are publicly avaiable at https:
//github.com/SergioSugaharaC/Neuranimations,
specifically the Unity 3D project and its de-
velopment versions for testing the models and
their added reactivity features with the envi-
ronment’s objects and terrain, as well as, our
models and script notebooks had been up-
loaded at https://drive.google.com/drive/folders/
14Xq5KwYPzx vGre878BQq51GxALuzsfM?usp=
sharing
4.2 Results
To compare our method of generating animations
and interactions we used different projects based in
Unity 3D and Deep Neural Networks that generates
reactive animations and interactions (Starke et al.,
2019) (Holden et al., 2017) (Zhang et al., 2018). For
the comparison, we took the Unity 3D projects of
each article and run them to see their performance in
terms of RAM usage as seen in Table 1 where we can
observe the different performance each Neural Net-
work has in the projects. This tests were made in
an i7-9700 with a total RAM of 16GB and a Nvidia
1050Ti Graphics Card.
In Table 1 we analyze our method presents slightly
better performance than the PFNN Original (Holden
et al., 2017) project, which presents the basic PFNN
animations, and the NSM (Starke et al., 2019), a
project containing different interactions that are gen-
erated by the corresponding Deep Neural Network.
On the other hand, the PFNN Adam Project has bet-
ter performance than ours, due to this being an opti-
mization on the Original PFNN resulting in a better
performance difference as expected.
As seen in Table 2, our model does not need to
be retrained whenever a new action is desired to be
added, since it works on top of the networks output
by blending it with a pose correction controlled by
IK. Hence, the network’s independence allows us to
increase the capabilities of performing different ac-
tions by adding hand crafted animations or blending
them to interact with said objects accordingly.
4.3 Discussion
As presented in section 4.2, our method presents bet-
ter performance than similar implementations of an-
imation generation in Unity 3D while adding inter-
actions to the framework with the usage of inverse
kinematics. In Table 1, we compared our RAM con-
sumption with two PFNN implementations made in
Unity 3D and a NSM implementation, also in Unity
3D, because of the difference to manage interactions.
With this results we can conclude that our method
presents a great alternative to other Neural Network
only approaches, maintaining a good performance
while adding the animations framework using anima-
tion rigs.
Furthermore, we presented the Table 2 that de-
scribes the needs that are present when adding a new
interaction to their projects. Our method excels at
adding animations to the project, by using an IK sys-
tem with targets and a set of personalized intractable
objects. In contrast to NSM (Starke et al., 2019) that
GRAPP 2022 - 17th International Conference on Computer Graphics Theory and Applications
258
Table 2: Traning comparison of NSM and Neuranimation.
NSM Ours
Interactions
Min
Animations
Re-training
Input
Features
Min
Animations
Re-training
Input
Features
1 5 Yes n 1 No 311
2 10 Yes n + 14 2 No 311
3 15 Yes n + 28 3 No 311
4 20 Yes n + 42 4 No 311
describes the state of the art Neural Network model
for the generation of animation of interactions while
correcting pose, needs to retrain and restructure input
and output data to add a new interaction to the model.
5 CONCLUSION
We conclude that by adding pose correction with IK
calculations to a Neural Network approach of ani-
mation generation, we could add interactions by us-
ing traditional animation for said interactions and the
Neural Network for the generations of the basic an-
imations. This mixed approach does not represents
a performance reduction while making the character
more reactive to the environment desired.
By adding animation riggings, we conclude that
the generation of new animations can be highly en-
hanced by this method, adding constraints of move-
ment and simplifying the calculations of bone posi-
tion an rotation while maintaining a correct anatomi-
cal structure. Also, simplifying the generation of re-
active animations using target for the rigs to move at.
In future works, we aim to improve the model
as a part of the PFNN instead of our current two
step approach, or even summarize events on the
fly (Chancolla-Neira et al., 2020).
REFERENCES
Aristidou, A., Lasenby, J., Chrysanthou, Y., and Shamir,
A. (2018). Inverse kinematics techniques in computer
graphics: A survey. Computer Graphics Forum, 37(6).
Bergamin, K., Clavet, S., Holden, D., and Forbes, J. R.
(2019). Drecon: data-driven responsive control of
physics-based characters. ACM Transactions On
Graphics, 38(6).
Chancolla-Neira, S. W., Salinas-Lozano, C. E., and Ugarte,
W. (2020). Static summarization using pearson’s co-
efficient and transfer learning for anomaly detection
for surveillance videos. In SIMBig.
Harvey, F. G. and Pal, C. J. (2018). Recurrent transition net-
works for character locomotion. In ACM SIGGRAPH
Asia Technical Briefs.
Holden, D., Kanoun, O., Perepichka, M., and Popa, T.
(2020). Learned motion matching. ACM Transactions
on Graphics, 39(4).
Holden, D., Komura, T., and Saito, J. (2017). Phase-
functioned neural networks for character control.
ACM Transactions on Graphics, 36(4).
Hwang, J., Kim, J., Suh, I. H., and Kwon, T. (2018).
Real-time locomotion controller using an inverted-
pendulum-based abstract model. Comput. Graph. Fo-
rum, 37(2).
Kingma, D. P. and Ba, J. (2014). Adam: A
method for stochastic optimization. arXiv preprint
arXiv:1412.6980.
Kitagawa, M. and Windsor, B. (2020). MoCap for artists:
workflow and techniques for motion capture. CRC
Press.
Kucuk, S. and Bingul, Z. (2006). Robot Kinematics: For-
ward and Inverse Kinematics.
Lever, N. (2001). Real-time 3D character animation with
Visual C++. Routledge.
M
´
enardais, S., Kulpa, R., Multon, F., and Arnaldi, B.
(2004). Synchronization for dynamic blending of mo-
tions. In Symposium on Computer Animation.
Park, S., Ryu, H., Lee, S., Lee, S., and Lee, J. (2019).
Learning predict-and-simulate policies from unorga-
nized human motion data. ACM Transactions on
Graphics, 38(6).
Peng, X. B., Berseth, G., Yin, K., and Van De Panne, M.
(2017). Deeploco: Dynamic locomotion skills using
hierarchical deep reinforcement learning. ACM Trans-
actions on Graphics, 36(4).
Starke, S., Zhang, H., Komura, T., and Saito, J. (2019).
Neural state machine for character-scene interactions.
ACM Trans. Graph., 38(6).
Zhang, H., Starke, S., Komura, T., and Saito, J. (2018).
Mode-adaptive neural networks for quadruped motion
control. ACM Transactions on Graphics, 37(4).
Neuranimation: Reactive Character Animations with Deep Neural Networks
259
