
An Occlusion Aware Five-view Stereo System and Its Application in
Video Post-production
Changan Zhu
a
, Taryn Laurendeau and Chris Joslin
b
School of Information Technology, Carleton University, 1125 Colonel By Drive, Ottawa, Canada
Keywords:
Stereo Vision, Disparity Enhancement, Image and Video Processing, Post Production, Visual Effects.
Abstract:
Extracting the live-action elements from videos has been a time-consuming process in the post-production
pipeline. The disparity map, however, shows the order of elements in a scene by indicating the distance
between the elements and the camera, which could potentially become an effective tool for separating videos
into ordered layers and preserving the 3D structure of the elements. In this research, we explored the possibility
of simplifying the live-action video element extraction technique with disparity sequences. We developed a
five-view disparity estimation and enhancement system with a two-axis setup that helps reduce the occlusions
in stereo vision. The system is independent from temporal reconstruction hence is compatible with both
dynamic and stationary camera paths. Our results show that the disparities from our system have visually and
quantitatively better performance than the traditional binocular stereo method, and its element extraction result
is comparable with the existing mature matting techniques in most cases. Ideally, the system design could be
applied in cinematography by replacing the center camera with a cinematographic camera, and the output can
be used for video object extraction, visual effects composition, video’s 2D to 3D conversion, or producing the
training data for neural-network-based depth estimation research.
1 INTRODUCTION
Video element extraction is one of the most widely
used techniques in the current post-production
pipeline. Media such as movies, television series, and
advertisements all use the technique to either replace
the background or composite visual effects (VFX)
into the original scene.
Chromakey, also known as color keying, is an ef-
fortless approach for element extraction that the in-
dustry has loved for decades. However, the element
extraction result from it can be easily influenced by
lighting conditions and the foreground objects; it also
requires a large scale of preliminary setup and is re-
stricted by the environment (Gvili et al., 2003). For
areas that are not covered by green screen or situa-
tions that the background needs to be preserved, Ro-
toscoping would be used. Yet the extraction quality
of Rotoscoping is highly dependent on the manual ef-
forts, it has a simple mechanism and is widely used
but also high-cost in terms of time consumption and
workload (Li et al., 2016). Other element extraction
a
https://orcid.org/0000-0002-2980-813X
b
https://orcid.org/0000-0002-6728-2722
Before
Aer
Figure 1: System procedure.
approaches in the industry, such as motion tracking
and auto-roto-painting, are either constrained by cam-
era movement or objects’ texture similarity. Addition-
ally, the mattes acquired from these techniques cut out
the elements as 2D planes, which only slice a scene
into few layers and provides limited composition ca-
pability. On the other hand, the disparity map reflects
an element’s position in a 3D scene, presenting the
element’s 3D structure and its order in the environ-
ment. The post-production pipeline usually adapts
depth maps from CG objects to enhance their compo-
sition results in live-action scenes (FXGuide, 2014).
844
Zhu, C., Laurendeau, T. and Joslin, C.
An Occlusion Aware Five-view Stereo System and Its Application in Video Post-production.
DOI: 10.5220/0010884400003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 5: VISAPP, pages
844-854
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Hence, having the disparity information of the live-
action objects might also effectively assist the matting
and visual effects composition. According to our lit-
erature review, existing accurate disparity estimation
methods such as LiDAR, Time-of-Flight have limits
in the distance and usually provide sparse depth data
that requires completions (Ma et al., 2019); Multi-
view methods like Structure-from-Motion (SfM) are
normally based on a static world assumption (Vi-
jayanarasimhan et al., 2017), thus are hardly appli-
cable on dynamic objects. Supervised and semi-
supervised monocular depth estimation networks re-
quire ground truth depth input that involves inten-
sive labor work; while the unsupervised networks rely
on adjacent frames for depth refinement that a mov-
ing camera shot is often needed (Ming et al., 2021).
Stereo vision, as one of the most well-studied depth
estimation techniques, is more flexible with the chal-
lenges from spatial density, non-stationary elements,
and camera paths while its accuracy and visual output
suffer from matching issues brought by feature mis-
match and occlusion (Bleyer and Breiteneder, 2013).
Therefore, we proposed a stereo system (see in Fig-
ure 1) that aims to simplify the element extraction
in post-production and solve the occlusion problem
in stereo matching. Our system acquires four stereo
pairs from horizontal and vertical axes by perceiving
a scene from five views, then centripetally align and
merge the disparity results. In this case, we can com-
pensate the occlusions from one axis with the infor-
mation from another axis. If we compare the occluded
area to shadow, our system reduces the occluded ar-
eas like a shadow-less lamp. We evaluated our system
quantitatively by comparing its results with traditional
binocular stereo. Also, we provided a visual compari-
son of the matting results from our method and indus-
try standard method. Accordingly, we contributed:
• A depth acquisition system that is fully compati-
ble with two non-overlapped baseline axes, which
generates quantitatively and visually better dispar-
ity than the state-of-the-art binocular stereo meth-
ods.
• A two-axis stereo rectification solution.
• A stereo dataset that provides stereo pairs from
five views and two axes with corresponding
ground truth.
• A matting method that could simplify the element
extraction process and provide a 3D matting op-
tion for more realistic visual effects.
2 RELATED WORKS
2.1 Element Extraction Approaches
In our research, the term element extraction refers
to the process of pulling target elements out from a
video, which relates to concepts such as video mat-
ting and segmentation. Available matting solutions
can be categorized into color keying, alpha matting,
and other innovative methods such as depth and defo-
cus.
2.1.1 Color Keying
Color keying provides high-quality matting results for
evenly lit-up objects that are filmed against a blue
or green screen. Commercial tools such as the Ul-
timatte (Blackmagic, 2021) and Keylight (Foundry,
2021) both provide outstanding foreground isolation
results. However, the method is restricted by the en-
vironment, the lighting condition, and foreground col-
ors.
2.1.2 Alpha Matting
Alpha matting is well discussed in academia but has
not been widely applied in the industry as it provides
limited robustness when dealing with fuzzy edges and
homogeneous regions. In pixel-sampling-based alpha
matting, it always requires well-specified trimaps (a
map showing the definite foreground, definite back-
ground, and the blended regions with both foreground
and background pixels) for accurate matting results,
and the result can be noisy when the provided trimap
is rough or when the input image contains highly
textured regions (Chuang et al., 2002). The pixel-
affinity-based alpha matting method has better per-
formance in terms of matte continuity and complex
background while it usually requires manual annota-
tion to help reducing errors from propagation (Levin
et al., 2008).
2.1.3 Depth Keying
The idea of using depth as an element extraction tool
was present early. Kanade et al. (Kanade et al.,
1996) addressed the possibility of using depth to iso-
late elements from a video clip automatically. Givili
et al. (Gvili et al., 2003) suggested the concept of
”depth keying” that extracts foreground objects from
the background using depth. After this, approaches
that use depth as guide information for more accurate
matting results were presented (Wang et al., 2012; Lu
and Li, 2012).
An Occlusion Aware Five-view Stereo System and Its Application in Video Post-production
845

2.1.4 Other Approaches
Researchers also propose many other innovative mat-
ting approaches such as segmentation, contour track-
ing, and light field. Li et al. (Li et al., 2005) pro-
posed to extract video objects with a 3D graph-cut-
based segmentation and a tracking-based local refine-
ment. Chung and Chen (Chung and Chen, 2009)
present a video segmentation method with Markov
Random Field (MRF) based contour tracking. The
limitations of these methods are that most of them
require manual annotations, and discontinuities can
be introduced due to the feature points lying beyond
the image boundaries. Wu et al. (Wu et al., 2017)
mentioned in their work about the matting problem
that could be solved with light field, but also pointed
out the restrictions from computational resources and
running time for light-field data.
2.2 Depth Estimation and Enhancement
Traditional vision-based stereo has advantages in
fewer environment constraints, consistent spatial res-
olution, high portability, and low cost, hence com-
monly used in the applications and research of depth
estimation. However, since it relies on finding cor-
respondence points from a stereo pair, errors are fre-
quently arisen by correspondence mismatch and oc-
clusion. To improve the accuracy of depth estimation,
researchers have explored both hardware and software
sides to produce or enhance disparities. For example,
existing solutions such as using light and laser (Zhu
et al., 2008; Silberman and Fergus, 2011; Ferstl et al.,
2013), optical features (Jeon et al., 2015; Zhou et al.,
2009; Tao et al., 2015), camera arrangement (Kanade
et al., 1996; Honegger et al., 2017), different kinds
of filters (Park et al., 2011; Yang et al., 2007; Barron
et al., 2015), and most recent research with the assis-
tance from neural networks (Park et al., 2018; Kopf
et al., 2020).
2.2.1 Light & Laser
Methods such as Time-of-Flight and LiDAR are ac-
curate within a certain distance and are used to create
ground truth disparity for many depth-estimation re-
lated researches (Scharstein et al., 2014). However,
both techniques create sparse data that requires com-
pletion (Ma et al., 2019). The distance limit and their
synthesizing with the cinematographic camera (Nair
et al., 2013) are also challenges lying ahead.
2.2.2 Optical Features & Camera Arrangement
Methods such as light field or camera arrays also
provide exciting accuracy. To acquire depth from
light-field, techniques such as pixel variations (Man-
akov et al., 2013; Heber et al., 2013), and graph-cut
(Jeon et al., 2015) are commonly used, while since it
does not model the occlusion boundaries, the perfor-
mance could be limited in object boundaries (Ihrke
et al., 2016) and noisy backgrounds, when it comes to
handling dynamic objects, light-field-based methods
could become very high-cost. Research using cam-
era array were also frequently proposed in the 2000s
and 2010s (Zhang and Chen, 2004; Fehrman and Mc-
Gough, 2014; Tao et al., 2018). The method is dif-
ferent from light-field in the sampling patterns (Ihrke
et al., 2016), while the techniques of acquiring depth
with camera array are rather similar to light field (e.g.,
Depth-from-Defocus). Typically, camera arrays re-
quire large amount of cameras hence research have
not investigated its application in a cinematographic
context.
2.2.3 Neural Networks
Monocular depth estimation using neural networks
does not require additional equipment, the results are
also temporally consistent that could be applied in
many daily life scenarios. However, the supervised
and semi-supervised networks’ training need ground
truth depth input, which are costly to acquire; the
unsupervised networks either require moving camera
paths to acquire and refine depth basing on the adja-
cent frames, or need stereo matching results for the
training (Ming et al., 2021).
2.2.4 Multi-view & Multi-baseline
Among all the depth enhancement technologies, the
improvement from the hardware side seems to be un-
avoidable, especially when precision and quality are
the primary goals. The multi-baseline stereo uses
more than one set of camera pairs with different base-
lines to reduce occlusion and produce better depth
(Honegger et al., 2017). Multi-view stereo, also
known as structure from motion (SfM) (Schonberger
and Frahm, 2016), acquires objects’ 3D structure
from a camera view’s temporally change. Most multi-
baseline and multi-view stereo methods could signif-
icantly improve the depth quality by adding cameras
or number of frames (Schonberger and Frahm, 2016;
Honegger et al., 2017). However, since the multi-
view stereo relies on temporal scanning, the dynamic
objects in a scene could corrupt the consistency thus
need to be removed or masked (Klodt and Vedaldi,
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
846
2018; Luo et al., 2020). In the multi-baseline side,
existing methods mostly arrange cameras on the same
axis due to the constraints from epipolar geometry,
where it requires many cameras and various base-
lines to reduce the occlusions, while the direction of
the occluded areas remain unchanged as the cameras
are setup on only one-axis. Therefore, the capabil-
ity of such system to improve depth quality is also
limited. Better results might be achieved with fewer
cameras and less variant in the baseline distances, but
from two different axes. In which case, the occlu-
sion that normally exists in one axis due to the single-
direction camera arrangement could be compensated
by the depth information acquired from the other di-
rection.
3 METHODOLOGY
Since the target scenario of our system is video post-
production, the disparity generated from our system
should have well-defined depth information at the tar-
get’s edges for a relatively good matting result, and
a smooth depth gradient that could accurately reflect
the target’s 3D structure for the purpose of visual ef-
fects composition. Additionally, we expect the system
to automatically generate disparity sequences without
excessive manual interventions.
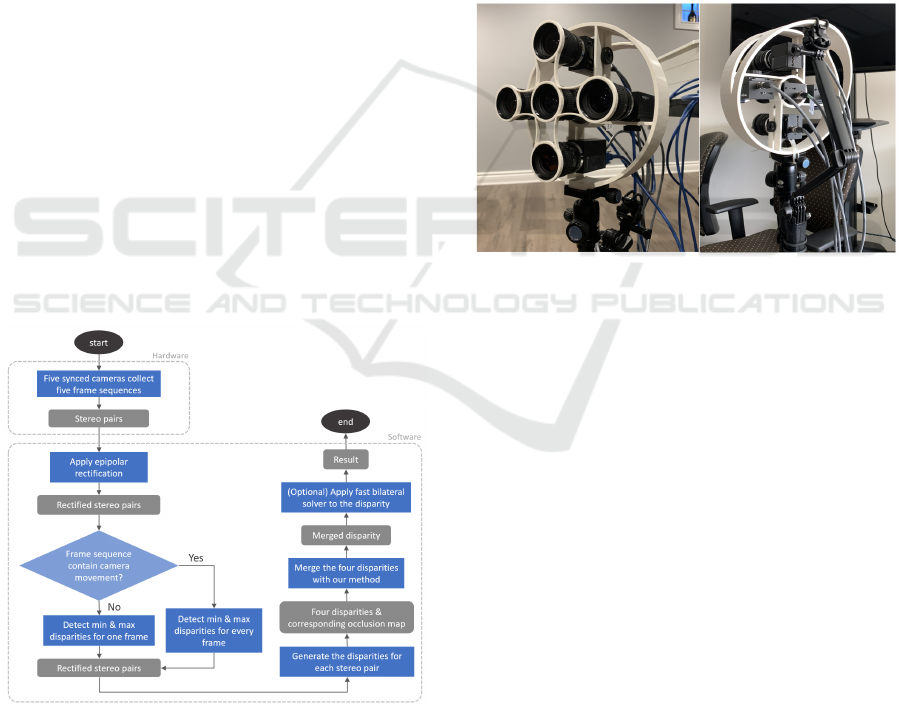
3.1 System Overview
Figure 2: System overview.
As shown in Figure 2, our system consists of a
hardware setup from five computer vision cameras
and a framework for the disparity generation and re-
finement. As each secondary camera captures a stereo
pair with the primary camera, the system first con-
ducts a two-axis rectification on each stereo pair, then
estimate and merge the disparities to output an en-
hanced disparity map. Optionally, a bilateral filter
could be applied to create smoother visual result.
3.1.1 Hardware
For the hardware setup (Figure 3), we used five com-
puter vision cameras that are connected through GPIO
cables with synchronized imaging parameters, trig-
ger signal, and framerate. To deploy the five cameras
with our two-axis design pattern, we modelled and 3D
printed a mount that can fix the cameras; and a lens
holder that could reduce unexpected rotation among
cameras to prevent massive distortion from rectifica-
tion.
Figure 3: Hardware setup.
3.1.2 Development
On the software side, we developed a framework con-
taining a two-axis image rectification method, an im-
plementation of cost-volume filter optimized Winner
Takes All (WTA) disparity estimation (Hosni et al.,
2012), and a disparity merging algorithm with helper
modules.
Two-axis Rectification. To reduce the computational
cost in the correspondence matching, the stereo-
vision-based methods normally involve stereo pair
rectification as a crucial step for reducing the cam-
eras’ intrinsic distortion and extrinsic positional de-
viation. Most multi-baseline stereo methods only ar-
range cameras on one axis (Kang et al., 2008; Yang
et al., 2014) due to the constrain of epipolar geome-
try. However, as our research set up the cameras on
two axes, we looked into non-epipolar methods like
correspondence-point-based rectification (Ota et al.,
2009; Nozick, 2011). In the research of Nozick (Noz-
ick, 2011), he considers the image rectification pro-
cess as a rotation around the optical center and an up-
date of the focal length, and simplified the problem to
finding the relations between the original image and
An Occlusion Aware Five-view Stereo System and Its Application in Video Post-production
847
the rectified image, which is represented as homogra-
phy matrix H
i
that satisfies the equation 1:
(H
i
x
k
i
)
y
− y
k
= 0 (1)
where y
k
is the average y-coordinate of the k
th
recti-
fied correspondence points, x
k
i
is the correspondence
points so the points are horizontally aligned to the
same y-coordinate (Nozick, 2011). However, it also
indicates that this method cannot be applied into our
system as we compute the depth for the cameras in
vertical directions by considering the y-axis as their
baselines, hence their y
k
would be the x
k
of the hori-
zontal cameras. In another word, the stereo pairs from
the two axes would be rectified based on different y
k
,
thus we cannot rectify the images from both direc-
tions at the same time. Otherwise, the rectified stereo
pairs would produce center disparities from different
image planes, where the objects do not align and the
results cannot be merged.
(a)
(d)
(b)
(c)
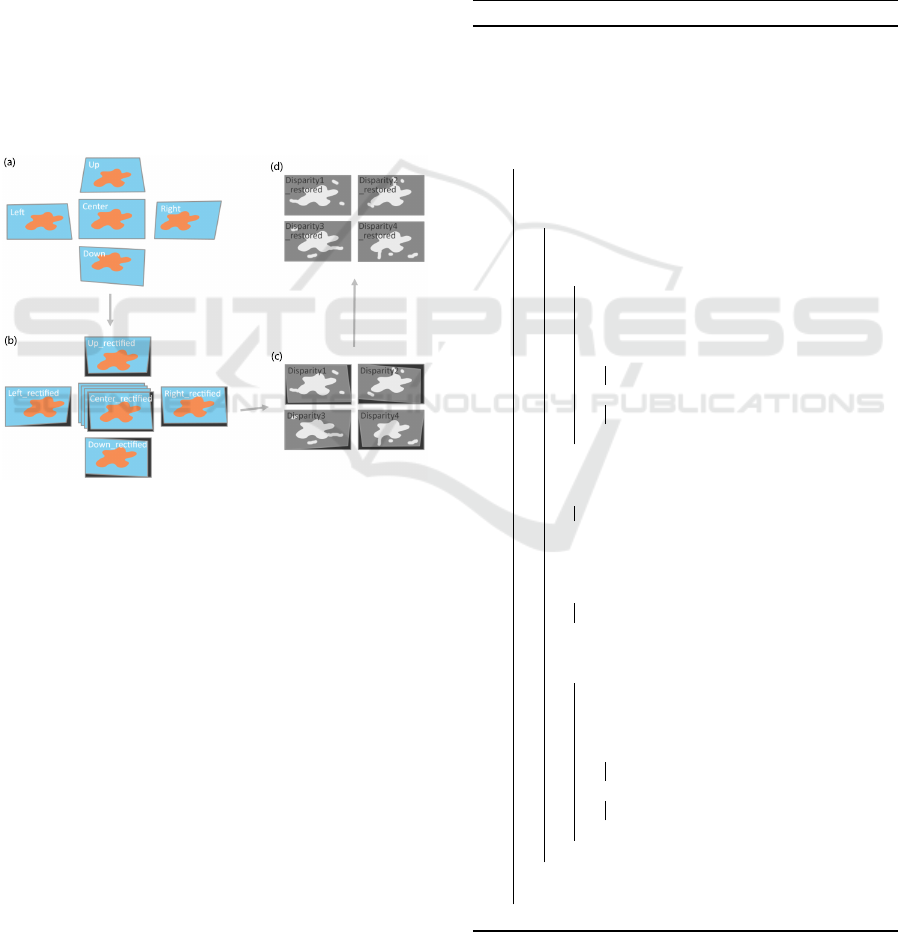
Figure 4: Our image rectification procedure.
Benefit from the pattern of our camera setup, we
resolved the problem in a simple way. As shown in
Figure 4, the two-axis rectification procedure follows:
firstly (Figure 4 (a)(b)), using epipolar-geometrical-
based method (Fusiello and Irsara, 2008) to rectify
the images as four stereo pairs and keep a copy of
the homographies that were applied on each pair; sec-
ondly (Figure 4 (c)), generate disparities from them
as per pair, making sure the disparities always align
to the rectified center image, now the four disparity
maps are on different image planes; finally (Figure 4
(d)), calculate the reverse matrices for the previous
homographies and apply them on each disparity, so
the disparities are restored to the original center cam-
era’s image plane, where the object boundaries would
align, and the disparities are ready to be merged.
Occlusion Aware Disparity Merging. To determine
from which disparity map should we select the depth
value and save to the result, we used the occlusion
map as the guide information that regions occluded
in one stereo pair are patched with the depth values
from another pair, where the same region is not oc-
cluded hence the depth value is more reliable. We
also introduced a threshold inspired by the ratio test
in SIFT algorithm (Lowe, 2004) for filtering the out-
lier depth values hence produces disparities with less
noises. The merging method is expected to fully use
the disparity information from the four disparities,
then compensate the disparity errors brought by oc-
clusion in the merged result. The detail of the merging
process is shown in Algorithm 1.
Algorithm 1: Occlusion Aware Disparity Merging.
Input: Sequence length SeqLength, threshold T ,
four disparity sequences Disp1
i
, Disp2
i
,
Disp3
i
, Disp4
i
and corresponding four
occlusion sequences.
Output: The merged disparity sequence Mrg
i
i = 0;
repeat
for each point’s depth value P
j
, ( j = 1, 2, 3, 4)
in the four disparity maps Disp1
i
, Disp2
i
,
Disp3
i
, Disp4
i
and occlusion maps. do
if P
j
is not occluded in all four disparities
or P
j
is all occluded in the four
disparities then
if one of the P
j
, (assume j = 1) is
(1 +T ) times larger or (1 − T ) times
smaller than the other three pixels
then
Mrg
i
= mean(P
j
, ( j = 2, 3, 4))
else
Mrg
i
= mean(P
j
, ( j = 1, 2, 3, 4))
end
end
if P
j
is occluded in three disparities,
assume only the P
1
is not occluded then
Mrg
i
= P
1
end
if P
j
is occluded in two disparities,
assume P
1
, P
2
are the two points not
occluded then
Mrg
i
= mean(P
j
, ( j = 1, 2))
end
if P
j
is occluded in only one disparities,
assume P
4
is the occluded point then
if one of the P
j
, (assume j = 3) is
(1 +T ) times larger or (1 − T ) times
smaller than the other two points
then
Mrg
i
= mean(P
j
, ( j = 1, 2))
else
Mrg
i
= mean(P
j
, ( j = 1, 2, 3))
end
end
end
i ++;
until i == SeqLength − 1;
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
848
Helper Modules (Min and Max Distances Detec-
tor & Fast Bilateral Solver). In the disparity esti-
mation procedure, it could speed up the correspon-
dence matching process if with known min and max
pixel distances among all corresponding points, as
they constrain the searching distance of the algorithm.
A moving camera shot or non-static element in the
scene would require dynamic min and max dispari-
ties information for more efficient disparity estima-
tion. To fit our system in such scenarios, we de-
veloped a simple min-max-disparities detector mod-
ule based on SURF and FLANN matching, where we
used SURF to compute the correspondence features
from a stereo pair and FLANN to filter the outlier
matches by using the Euclidean distances among the
descriptors of features. To produce smoother visual
output, we also adapted the fast bilateral solver from
Barron and Poole (Barron and Poole, 2016) as an op-
tional step in the framework, while we did not use the
disparities processed by the solver in the quantitative
evaluation to ensure the evaluation’s accuracy.
3.2 Experiment
To compare the binocular method with our method, as
well as to compare the matting results from the indus-
trial standard toolbox and our disparity matting, we
designed the experiment with two main comparisons:
1. A quantitative comparison (binocular disparity vs.
our disparity, Chromakey matting vs our matting):
using rendered image sequences from virtual en-
vironments to generate disparities and mattes, and
evaluating their accuracy with rendered disparities
and mattes ground truth;
2. A visual Comparison (binocular disparity vs. our
disparity, Chromakey matting vs our matting):
Using live-action image sequences, generating
disparity and matte sequences, compare the dis-
parity output with binocular stereo methods, and
compare the matting result with industry matting
tool;
For the binocular disparity, we selected the same dis-
parity estimation method (Hosni et al., 2012) used in
the system to ensure a consistent comparison.
3.2.1 Data Collection
To test and collect data with our five-camera setup, we
designed both virtual and live-action environments for
the data collection.
Computer Generated (CG) Data. The CG data are
collected through Maya, where we can easily sim-
ulate various virtual scenes and deviations, generate
ground truth depths and mattes for quantitative com-
parison. We created two virtual environments with
the five-view camera setup (virtual cameras) as the
system design. Each environment is split into three
scenarios, which are the ideal, the semi-realistic, and
the realistic scenarios. The three scenarios all have a
stereo version for disparity accuracy comparison and
a version with a green screen for the matting accuracy
comparison (see in Table 1).
Table 1: The virtual environment setup for disparity and
matting accuracy comparison.
Chromakey ver-
sion
Stereo version
Ideal
• No color-spill • Evenly lit up
• No shadow on the
screen
• Objects with obvi-
ous color difference
• No objects with
screen color
• No camera rotation
or translation
Semi-real
• No color-spill • Low light
• Has shadow on
the screen
• Objects with simi-
lar color and texture
• Has objects with
screen color
• No camera rotation
or translation
Realistic
• Has color-spill • Low light
• Has shadow on
the screen
• Objects with simi-
lar color and texture
• Has objects with
screen color
• Has camera rota-
tion and translation
Live-action Data. The live-action data are collected
with our five-camera system. We recorded videos
from eight scenes and selected the three best synchro-
nized with no corrupted or skipped frames. Due to
the fact that the ground truth for the live-action scenes
cannot be generated with available experiment tools,
they are shown in the visual comparison section and
the accompanying video.
3.2.2 Metrics
In the experiment, we involved two metrics for evalu-
ating our system output.
Disparity Accuracy. As applying the disparities
from our system in post-production is our primary
goal, the disparity accuracy is an essential factor
that could reflect the system’s performance. In the
evaluation of our disparity accuracy, we followed the
convention in existing disparity evaluation methods
(Scharstein et al., 2014) that we chose Root Mean
Square Error (RMSE) and Mean Absolute Percentage
Error (MAPE) as two of our main measures. Since
our objective is to apply the output to post-editing,
where the quality is mainly evaluated through human
visual system, we also included Structural Similarity
Index (SSIM) as it effectively measures image dif-
An Occlusion Aware Five-view Stereo System and Its Application in Video Post-production
849

Figure 5: Visual comparison of matting between Chromakey and our result.
ference from a human visual perspective (Sara
et al., 2019).
Matting Accuracy. While generating matte from our
disparity bridges the research output and the post-
production process, the matting accuracy is another
key evaluating metric in our experiment. As is elab-
orated in Section 3.2, we compared the matte from
our disparity with an industrial color keyer Keylight
(Foundry, 2021). For the measures, we also used
RMSE, MAPE, and SSIM.
We animated the virtual environments with move-
ments applied on the objects or cameras for both dis-
parities and matting accuracy evaluations. Every se-
quence for each scenario is 100 frames long. Our
comparison took the mean value of each measure
from the 100 frames instead of the values from only
one frame.
4 RESULTS
4.1 Quantitative Comparison
4.1.1 Disparity Accuracy
As shown in Table 2, our method shows higher SSIM
result in all scenarios and remains stable in the realis-
tic scenario while the SSIM of the binocular method
drops significantly when the camera relative rotation
and translation are introduced.
The RMSE and MAPE are error metrics that show
reverse behavior with SSIM. The disparity error gap
between our method and the binocular method are rel-
atively small in ideal and semi-realistic scenarios but
Table 2: The disparity accuracy comparison result.
Measure Method Ideal Semi-
realistic
Realistic
RMSE ↓
Our method 6.41 7.66 9.39
Binocular stereo 14.65 17.63 37.90
MAPE ↓
Our method 0.91% 0.96% 1.30%
Binocular stereo 1.56% 1.78% 9.64%
SSIM ↑
Our method 95.36% 94.88% 94.01%
Binocular stereo 93.12% 92.64% 78.50%
widen when it comes to a realistic scenario.
4.1.2 Matting Accuracy
The matting accuracy is also evaluated under ideal,
semi-realistic, and realistic scenarios. Chromakey’s
matting results are separated into raw and adjusted
versions for a more comprehensive comparison since
Keylight might reach a high matting accuracy with
some parameter changes. The raw version is simply
to extract the green screen color from the video with-
out any parameter adjustment, and the adjusted ver-
sion is the best Keylight matting accuracy we can get
by changing the parameters. The adjustment does not
involve any garbage matte or post-editing.
As can be observed from Table 3, it is not sur-
prising to see that adjusted Chromakey results show
higher SSIM and lower error rates than ours in ideal
and semi-realistic scenarios. However, our results
provide better performance in the realistic scenario,
and the unprocessed Chromakey matting results are
always less accurate than ours, which means Chro-
makey has to involve manual adjustments for a decent
output while our method performs well by running
automatically.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
850
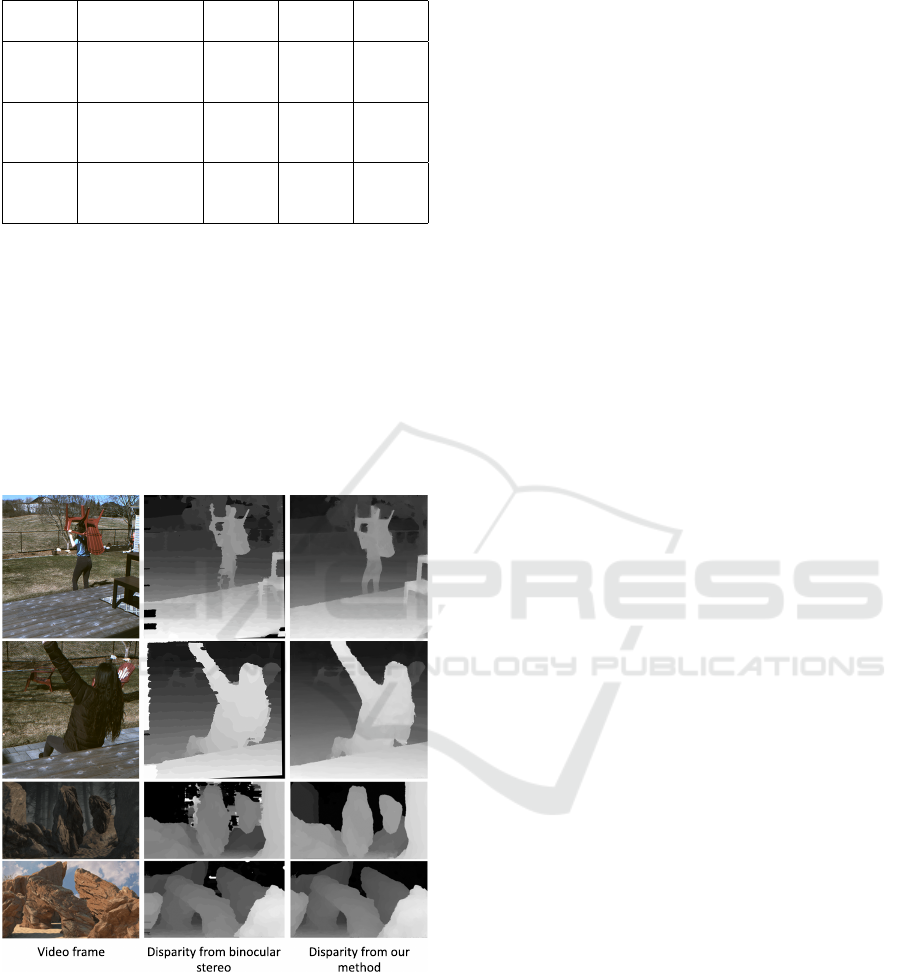
Table 3: The matting accuracy comparison result.
Measure Method Ideal Semi-
realistic
Realistic
RMSE ↓
Our method 13.25 15.32 16.43
Keylight raw 9.22 19.64 49.23
Keylight adjusted 7.88 11.43 21.65
MAPE ↓
Our method 0.28% 0.37% 0.44%
Keylight raw 0.76% 0.32% 14.45%
Keylight adjusted 0.16% 0.24% 0.97%
SSIM ↑
Our method 98.80% 98.56% 98.45%
Keylight raw 83.71% 76.57% 44.28%
Keylight adjusted 99.33% 98.71% 96.05%
4.2 Visual Comparison
In the visual comparison for disparity, we gener-
ated depth sequences with both the binocular stereo
method and our method. In the comparison (Fig-
ure 6), our output shows cleaner edges, smoother
depth gradient, and has corrected many depth value
errors brought by occlusion. We also provided a vi-
sual comparison of matting between Chromakey and
our method.
Video frame Disparity from binocular
stereo
Disparity from our
method
Figure 6: Visual comparison of disparity between binocular
stereo and our result.
For the depth-based-matting, we used our five-
view system to capture the screen-free scenes; for the
Chromakey-based matting, we replicated the move-
ments from the screen-free scenes but filmed with
green screen. The matting results (Figure 5) reveal
that even on the green screen covered regions, it is
hard to acquire a noise-free matte if there is a dense
shadow on the screen or any object with screen color
in the shots. Even the adjusted Chromakey matting
results require a large amount of garbage matte due to
green size limit and noises on the shadow area. On the
contrary, our method only requires selecting a range
of depth to create a matte. Also, we can select an ar-
bitrary range of depth from the disparity sequence to
mask out any part of the scene instead of only being
able to extract objects with a green screen behind.
4.3 Composition Test
To further demonstrate the matting capability of our
output, we composite visual effects into the videos
and compared it with the composition result from
Chromakey (more examples are included in the ac-
companying video).
As can be observed from Figure 7, since Chro-
makey only provides a two-layer matte that separates
the foreground and background as two planes, we can
only insert the effects as a single layer. However,
with disparity sequence, the scenes could be sliced
into multiple layers, where we can select a specific
range to insert the effects. When compositing ef-
fects that the amount of its opacity is influenced by
objects’ depth (e.g., fire, explosion, sandstorm, fog),
having the disparity information of certain element
could help blend the visual effects into the live-action
shot for more vivid composition result.
4.4 Discussion
According to the results from our experiment, our
system generates disparity maps that have quantita-
tively and visually better performance than the tra-
ditional binocular disparity acquisition method, es-
pecially after the real-life challenges were added to
the experiment. Comparing the matting results be-
tween our method and the commercial color-keying
method, our disparity-based matting shows less ac-
curacy in an edge-detail-preserving perspective, but
provides outstanding matte accuracy within objects
though adding with highly influential challenges such
as camera’s positional deviations and color inconsis-
tency. Besides, our results reflect the depth gradient of
objects, which provides the post-production pipeline
with another option to composite effects regarding ob-
jects’ 3D structure, and the process is fully automated.
5 CONCLUSION
This research presents a stereo system that perceives a
scene from five views, where cameras from different
An Occlusion Aware Five-view Stereo System and Its Application in Video Post-production
851
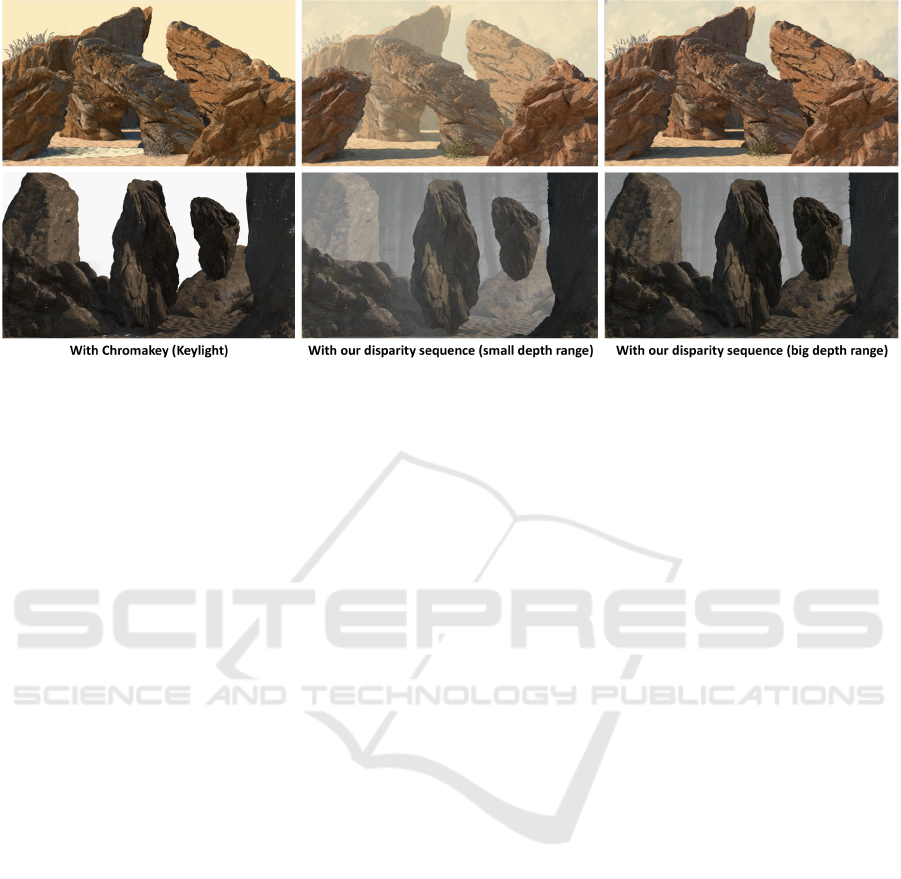
Figure 7: Insert effects into the virtual scenes.
directions fill the blind spots that other cameras can-
not capture due to occlusion. The system is compat-
ible with both stationary and dynamic camera shots
and objects and has provided a new solution to live-
action elements’ extraction and visual effects compo-
sition. Throughout the research, we present a two-
axis image rectification solution that efficiently re-
duced the difficulty of rectifying stereo pairs from var-
ious axes and have contributed the first stereo dataset
that consists of five views in two axes, which are ap-
plicable in other multi-baseline or multi-view stereo
researches.
Our research is not free of limitations. Since our
research focuses more on solving the element extrac-
tion problem in the post-production, we compared the
matting results from our method with the the indus-
trial solutions. In the disparity side, we compared
our method with binocular stereo, but did not com-
pare with other multi-camera stereo methods, which
should be added in future for a more comprehensive
evaluation. We have not yet explored the disparity
matting for transparent or semi-transparent objects;
while it might be a frequently encountered task in
real-life video filming scenarios, we shall explore the
possibility of applying our method in such circum-
stances and replenish our system with new modules
for more complicated situations.
In the future work, we would like to attempt syn-
thesizing the stereo vision cameras and cinemato-
graphic camera, hence narrowing down the gap be-
tween the research and the industrial practices. On
the software side, we would like to explore the in-
tegration of image segmentation for reducing match-
ing errors caused by texture-less regions and the algo-
rithm’s lack of understanding of the semantics. Also,
learning-based temporal smoothing could be intro-
duced for more consistent depth output. On the appli-
cation side, by optimizing the procedure to real-time,
we can also explore the applications of this system in
VR and AR for providing a more interactive experi-
ence.
REFERENCES
Barron, J. T., Adams, A., Shih, Y., and Hern
´
andez, C.
(2015). Fast bilateral-space stereo for synthetic defo-
cus. In Proceedings of the IEEE Conference on Com-
puter Vision and Pattern Recognition, pages 4466–
4474.
Barron, J. T. and Poole, B. (2016). The fast bilateral solver.
In European Conference on Computer Vision, pages
617–632. Springer.
Blackmagic (2021). Ultimatte.
Bleyer, M. and Breiteneder, C. (2013). Stereo
matching—state-of-the-art and research challenges.
In Advanced topics in computer vision, pages 143–
179. Springer.
Chuang, Y.-Y., Agarwala, A., Curless, B., Salesin, D. H.,
and Szeliski, R. (2002). Video matting of complex
scenes. In Proceedings of the 29th Annual Conference
on Computer Graphics and Interactive Techniques,
volume 50, pages 243–248, New York, NY, USA. As-
sociation for Computing Machinery.
Chung, C.-Y. and Chen, H. H. (2009). Video object ex-
traction via mrf-based contour tracking. IEEE trans-
actions on circuits and systems for video technology,
20(1):149–155.
Fehrman, B. and McGough, J. (2014). Depth mapping us-
ing a low-cost camera array. In 2014 Southwest sym-
posium on image analysis and interpretation, pages
101–104. IEEE.
Ferstl, D., Reinbacher, C., Ranftl, R., R
¨
uther, M., and
Bischof, H. (2013). Image guided depth upsampling
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
852

using anisotropic total generalized variation. In Pro-
ceedings of the IEEE International Conference on
Computer Vision, pages 993–1000.
Foundry (2021). Keylight-foundry learn. website.
Fusiello, A. and Irsara, L. (2008). Quasi-euclidean uncal-
ibrated epipolar rectification. In 2008 19th Interna-
tional Conference on Pattern Recognition, pages 1–4.
IEEE.
FXGuide (2014). The art of deep compositing. website.
Gvili, R., Kaplan, A., Ofek, E., and Yahav, G. (2003). Depth
keying. In Woods, A. J., Merritt, J. O., Benton, S. A.,
and Bolas, M. T., editors, Stereoscopic Displays and
Virtual Reality Systems X, volume 5006, pages 564–
574. SPIE.
Heber, S., Ranftl, R., and Pock, T. (2013). Variational shape
from light field. In International Workshop on Energy
Minimization Methods in Computer Vision and Pat-
tern Recognition, pages 66–79. Springer.
Honegger, D., Sattler, T., and Pollefeys, M. (2017). Em-
bedded real-time multi-baseline stereo. In 2017 IEEE
International Conference on Robotics and Automation
(ICRA), pages 5245–5250. IEEE.
Hosni, A., Rhemann, C., Bleyer, M., Rother, C., and
Gelautz, M. (2012). Fast cost-volume filtering for
visual correspondence and beyond. IEEE Transac-
tions on Pattern Analysis and Machine Intelligence,
35(2):504–511.
Ihrke, I., Restrepo, J., and Mignard-Debise, L. (2016). Prin-
ciples of light field imaging: Briefly revisiting 25
years of research. IEEE Signal Processing Magazine,
33(5):59–69.
Jeon, H.-G., Park, J., Choe, G., Park, J., Bok, Y., Tai, Y.-W.,
and So Kweon, I. (2015). Accurate depth map estima-
tion from a lenslet light field camera. In Proceedings
of the IEEE conference on computer vision and pat-
tern recognition, pages 1547–1555.
Kanade, Y., Yoshida, A., Oda, K., Kano, H., and Tanaka, M.
(1996). A stereo machine for video-rate dense depth
mapping and its new applications. In Proceedings
CVPR IEEE Computer Society Conference on Com-
puter Vision and Pattern Recognition, pages 196–202.
Kang, Y.-S., Lee, C., and Ho, Y.-S. (2008). An efficient
rectification algorithm for multi-view images in par-
allel camera array. In 2008 3DTV Conference: The
True Vision-Capture, Transmission and Display of 3D
Video, pages 61–64. IEEE.
Klodt, M. and Vedaldi, A. (2018). Supervising the new with
the old: learning sfm from sfm. In Proceedings of the
European Conference on Computer Vision (ECCV),
pages 698–713.
Kopf, J., Matzen, K., Alsisan, S., Quigley, O., Ge, F.,
Chong, Y., Patterson, J., Frahm, J.-M., Wu, S., Yu,
M., et al. (2020). One shot 3d photography. ACM
Transactions on Graphics (TOG), 39(4):76–1.
Levin, A., Lischinski, D., and Weiss, Y. (2008). A closed-
form solution to natural image matting. IEEE Trans-
actions on Pattern Analysis and Machine Intelligence,
30(2):228–242.
Li, W., Viola, F., Starck, J., Brostow, G. J., and Campbell,
N. D. (2016). Roto++ accelerating professional roto-
scoping using shape manifolds. ACM Transactions on
Graphics (TOG), 35(4):1–15.
Li, Y., Sun, J., and Shum, H.-Y. (2005). Video object cut
and paste. In ACM SIGGRAPH 2005 Papers, pages
595–600.
Lowe, D. G. (2004). Distinctive image features from scale-
invariant keypoints. International journal of computer
vision, 60(2):91–110.
Lu, T. and Li, S. (2012). Image matting with color
and depth information. In Proceedings of the
21st International Conference on Pattern Recognition
(ICPR2012), pages 3787–3790. IEEE.
Luo, X., Huang, J.-B., Szeliski, R., Matzen, K., and Kopf,
J. (2020). Consistent video depth estimation. ACM
Transactions on Graphics (TOG), 39(4):71–1.
Ma, F., Cavalheiro, G. V., and Karaman, S. (2019). Self-
supervised sparse-to-dense: Self-supervised depth
completion from lidar and monocular camera. In 2019
International Conference on Robotics and Automation
(ICRA), pages 3288–3295. IEEE.
Manakov, A., Restrepo, J., Klehm, O., Hegedus, R., Eise-
mann, E., Seidel, H.-P., and Ihrke, I. (2013). A recon-
figurable camera add-on for high dynamic range, mul-
tispectral, polarization, and light-field imaging. ACM
Transactions on Graphics, 32(4):47–1.
Ming, Y., Meng, X., Fan, C., and Yu, H. (2021). Deep
learning for monocular depth estimation: A review.
Neurocomputing.
Nair, R., Ruhl, K., Lenzen, F., Meister, S., Sch
¨
afer, H.,
Garbe, C. S., Eisemann, M., Magnor, M., and Kon-
dermann, D. (2013). A survey on time-of-flight stereo
fusion. In Time-of-Flight and Depth Imaging. Sen-
sors, Algorithms, and Applications, pages 105–127.
Springer.
Nozick, V. (2011). Multiple view image rectification. In
2011 1st International Symposium on Access Spaces
(ISAS), pages 277–282. IEEE.
Ota, M., Fukushima, N., Yendo, T., Tanimoto, M., and Fujii,
T. (2009). Rectification of pure translation 2d camera
array. In Proceedings of the Korean Society of broad-
cast engineers conference, pages 659–663. The Ko-
rean Institute of Broadcast and Media Engineers.
Park, J., Kim, H., Tai, Y.-W., Brown, M. S., and Kweon, I.
(2011). High quality depth map upsampling for 3d-tof
cameras. In 2011 International Conference on Com-
puter Vision, pages 1623–1630. IEEE.
Park, K., Kim, S., and Sohn, K. (2018). High-precision
depth estimation with the 3d lidar and stereo fusion.
In 2018 IEEE International Conference on Robotics
and Automation (ICRA), pages 2156–2163. IEEE.
Sara, U., Akter, M., and Uddin, M. S. (2019). Image qual-
ity assessment through fsim, ssim, mse and psnr—a
comparative study. Journal of Computer and Commu-
nications, 7(3):8–18.
Scharstein, D., Hirschm
¨
uller, H., Kitajima, Y., Krathwohl,
G., Ne
ˇ
si
´
c, N., Wang, X., and Westling, P. (2014).
High-resolution stereo datasets with subpixel-accurate
ground truth. In German conference on pattern recog-
nition, pages 31–42. Springer.
An Occlusion Aware Five-view Stereo System and Its Application in Video Post-production
853

Schonberger, J. L. and Frahm, J.-M. (2016). Structure-
from-motion revisited. In Proceedings of the IEEE
Conference on Computer Vision and Pattern Recogni-
tion, pages 4104–4113.
Silberman, N. and Fergus, R. (2011). Indoor scene segmen-
tation using a structured light sensor. In 2011 IEEE in-
ternational conference on computer vision workshops
(ICCV workshops), pages 601–608. IEEE.
Tao, M. W., Srinivasan, P. P., Malik, J., Rusinkiewicz, S.,
and Ramamoorthi, R. (2015). Depth from shading,
defocus, and correspondence using light-field angular
coherence. In Proceedings of the IEEE Conference
on Computer Vision and Pattern Recognition, pages
1940–1948.
Tao, T., Chen, Q., Feng, S., Hu, Y., and Zuo, C. (2018).
Active depth estimation from defocus using a camera
array. Applied optics, 57(18):4960–4967.
Vijayanarasimhan, S., Ricco, S., Schmid, C., Sukthankar,
R., and Fragkiadaki, K. (2017). Sfm-net: Learning
of structure and motion from video. arXiv preprint
arXiv:1704.07804.
Wang, L., Gong, M., Zhang, C., Yang, R., Zhang, C.,
and Yang, Y.-H. (2012). Automatic real-time video
matting using time-of-flight camera and multichannel
poisson equations. International journal of computer
vision, 97(1):104–121.
Wu, G., Masia, B., Jarabo, A., Zhang, Y., Wang, L., Dai,
Q., Chai, T., and Liu, Y. (2017). Light field image
processing: An overview. IEEE Journal of Selected
Topics in Signal Processing, 11(7):926–954.
Yang, J., Ding, Z., Guo, F., and Wang, H. (2014). Multi-
view image rectification algorithm for parallel camera
arrays. Journal of Electronic Imaging, 23(3):033001.
Yang, Q., Yang, R., Davis, J., and Nist
´
er, D. (2007). Spatial-
depth super resolution for range images. In 2007 IEEE
Conference on Computer Vision and Pattern Recogni-
tion, pages 1–8. IEEE.
Zhang, C. and Chen, T. (2004). A self-reconfigurable cam-
era array. In ACM SIGGRAPH 2004 Sketches, page
151.
Zhou, C., Lin, S., and Nayar, S. (2009). Coded aperture
pairs for depth from defocus. In 2009 IEEE 12th inter-
national conference on computer vision, pages 325–
332. IEEE.
Zhu, J., Wang, L., Yang, R., and Davis, J. (2008). Fusion
of time-of-flight depth and stereo for high accuracy
depth maps. In 2008 IEEE Conference on Computer
Vision and Pattern Recognition, pages 1–8. IEEE.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
854
