Beyond Global Average Pooling: Alternative Feature Aggregations for
Weakly Supervised Localization
Matthias K
¨
orschens
1 a
, Paul Bodesheim
1 b
and Joachim Denzler
1,2 c
1
Friedrich Schiller University Jena, F
¨
urstengraben 1, Jena, Germany
2
DLR Institute of Data Science, M
¨
alzerstraße 3-5, Jena, Germany
Keywords:
Computer Vision, Pooling, Weakly Supervised Object Localization, Weakly Supervised Segmentation.
Abstract:
Weakly supervised object localization (WSOL) enables the detection and segmentation of objects in appli-
cations where localization annotations are hard or too expensive to obtain. Nowadays, most relevant WSOL
approaches are based on class activation mapping (CAM), where a classification network utilizing global av-
erage pooling is trained for object classification. The classification layer that follows the pooling layer is then
repurposed to generate segmentations using the unpooled features. The resulting localizations are usually im-
precise and primarily focused around the most discriminative areas of the object, making a correct indication
of the object location difficult. We argue that this problem is inherent in training with global average pooling
due to its averaging operation. Therefore, we investigate two alternative pooling strategies: global max pooling
and global log-sum-exp pooling. Furthermore, to increase the crispness and resolution of localization maps,
we also investigate the application of Feature Pyramid Networks, which are commonplace in object detection.
We confirm the usefulness of both alternative pooling methods as well as the Feature Pyramid Network on the
CUB-200-2011 and OpenImages datasets.
1 INTRODUCTION
In recent years, most of the basic supervised learning
tasks in computer vision, like image categorization,
semantic segmentation, and object detection, have
been solved to a satisfactory degree on a multitude
of benchmark datasets by using convolutional neural
networks (CNNs). However, the proposed approaches
are often quite data-hungry, and solving the above-
mentioned tasks in a new domain usually requires an
entirely new set of data annotations, with many hours
of labor to label the images depending on the task.
Therefore, the focus recently shifts more in the direc-
tion of weakly supervised approaches, where the label
annotations do not match the target output of the task
but are more imprecise. There are, for example, ap-
proaches that try to solve weakly supervised semantic
segmentation (WSSS) based on bounding box labels
or even class labels only. Moreover, other approaches
try to solve the task of weakly supervised object local-
ization (WSOL), i.e., determining either the bounding
a
https://orcid.org/0000-0002-0755-2006
b
https://orcid.org/0000-0002-3564-6528
c
https://orcid.org/0000-0002-3193-3300
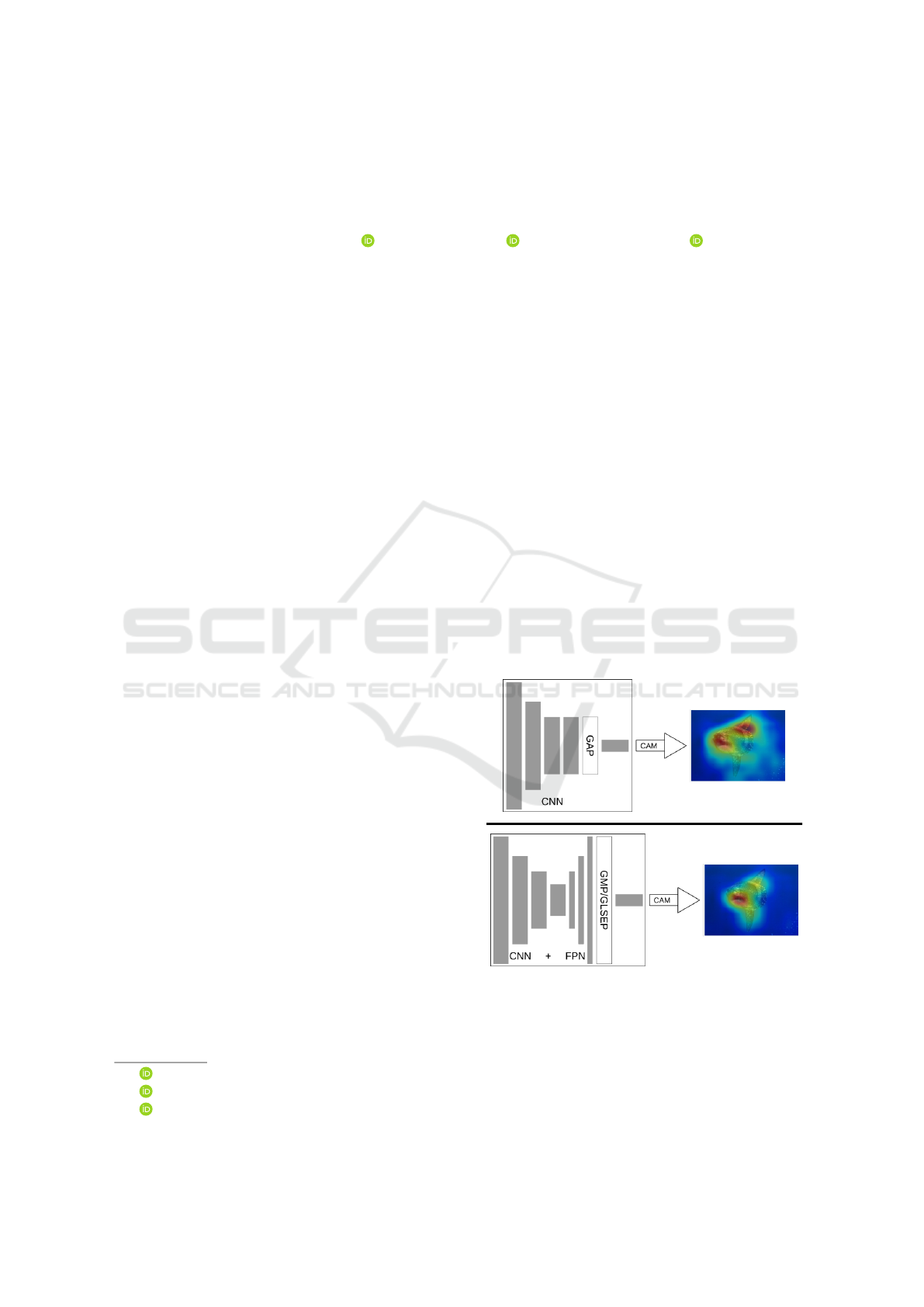
Figure 1: An overview of the differences between the stan-
dard CAM method (top) using GAP, and our method (bot-
tom), which utilizes GMP/GLSEP and optionally an FPN.
box or the segmentation map for an object of a known
class in an image.
Enabling WSSS or WSOL based on images with
class labels only is of great importance, as this kind
of annotation is the easiest one to acquire, either by
180
Körschens, M., Bodesheim, P. and Denzler, J.
Beyond Global Average Pooling: Alternative Feature Aggregations for Weakly Supervised Localization.
DOI: 10.5220/0010871700003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 4: VISAPP, pages
180-191
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

explicit annotations of domain-experts in specialized
fields or implicitly annotated images found online.
Hence, requiring only class labels for images mas-
sively reduces the amount of work required to enable
more advanced tasks like segmentation and object lo-
calization in a novel domain.
There already exist many different approaches for
WSOL. Most of the recent ones are based on the class
activation mapping work by Zhou et al. (2016). They
discovered that the weights of a classification network
can be repurposed in a convolutional layer to create
a map of class activations, known as class activation
maps (CAMs). When applied at the last layer of a
feature extractor backbone, these CAMs show high
activations in image regions containing features that
correspond to the specific classes. Hence, CAMs can
also be thresholded and afterward converted into seg-
mentations or bounding boxes, as shown in (Zhou
et al., 2016).
CAMs are typically used with network architec-
tures that are trained for a classification task and con-
tain global average pooling. However, training these
networks leads to certain issues. First, the network
primarily focuses on the most discriminative regions
of the objects instead of the complete object, mak-
ing correct localization hard. Second, the averaging
operation does not encourage the network to learn
crisp localizations, but rather fuzzy ones as activa-
tions are often distributed to neighboring pixels to in-
crease the activation and, therefore, also the classi-
fication score. There have been several WSOL ap-
proaches based on the CAM method to counter these
problems, for example, by introducing certain types
of occluding data augmentations to improve the distri-
bution of the CAMs over the whole object (Yun et al.,
2019; Zhang et al., 2018b; Singh and Lee, 2017).
Other methods try to modify the algorithm for gen-
erating the CAM or the localization map (Selvaraju
et al., 2017; Chattopadhay et al., 2018; Fu et al., 2020;
Wang et al., 2020; Ramaswamy et al., 2020; Muham-
mad and Yeasin, 2020).
We argue that most problems in the outputs of the
CAM method are established during network train-
ing. Hence, if the training is done correctly, i.e., in
a way that such problems do not occur, they do not
require fixing afterward. In this context, we found
that the base method of CAM, i.e., utilizing a classi-
fication network with a global average pooling layer,
has not been revisited in recent papers. As mentioned
above, global average pooling has several caveats that
lead, in our opinion, to suboptimal performance for
WSOL. Therefore, we investigate two alternatives:
global max pooling (GMP) and global log-sum-exp
pooling (GLSEP). Regarding the former, Zhou et al.
(2016) argued that GMP focuses too much on a single
point in the image and is therefore not a good option
for proper localization. Hence, we also investigate
GMP in the setting of training with occluded inputs,
similar to several approaches mentioned before. In
addition to this, we also consider the second potential
replacement: GLSEP. As the log-sum-exp function is
a fully differentiable approximation of the maximum
function but still aggregates information over multiple
locations in the image similar to GAP, it can be treated
as a compromise between GMP and GAP. Similar
methods to GLSEP have been applied before in classi-
fication (Zhang et al., 2018a) and in a different WSOL
setting (Pinheiro and Collobert, 2015). However, to
the best of our knowledge, we are the first to apply
this kind of pooling method to WSOL in combination
with CAMs. There are also other methods represent-
ing a compromise between GMP and GAP (Christlein
et al., 2019). However, we focus on GLSEP as it is a
comparably simple and parameter-free option.
A recurring problem in WSOL is the small output
resolution of the CAMs caused by the small resolu-
tions of the last layers in the feature extraction back-
bones. This is usually partially resolved by remov-
ing strides in the last layers of the backbones and
thus doubling or quadrupling the output size. How-
ever, this way, the last layers usually merely contain
high-level features but, for example, little informa-
tion about local object borders. Feature Pyramid Net-
works (FPNs) (Lin et al., 2017a) are often used for
object detection and segmentation tasks. However,
they are usually not used in WSOL. We, therefore,
investigate FPNs as an alternative to simply removing
strides in the network, as they provide a simple way to
include low-level features in a rich feature represen-
tation and thus have the potential to improve localiza-
tion even further. An example output of our combined
method can be seen in Figure 1.
Therefore, our contributions are the following: we
revisit the basic CAM method and investigate two al-
ternatives to the commonly used GAP layer: GMP
and GLSEP. We analyze these layers as simple re-
placement of GAP and in combination with FPNs.
By implementing the usage of FPNs in the WSOL
task, we want to determine if it is a viable alterna-
tive to simply removing strides. Therefore, we inves-
tigate different extraction layers of the FPN and ana-
lyze their influence on the localization performance.
We also incorporate an occlusion augmentation sim-
ilar to those already proposed by others (Singh and
Lee, 2017; Yun et al., 2019; Choe and Shim, 2019).
Beyond Global Average Pooling: Alternative Feature Aggregations for Weakly Supervised Localization
181

2 RELATED WORK
Weakly Supervised Object Localization. One of the
most prominent approaches in the area of WSOL is
the already mentioned CAM approach (Zhou et al.,
2016). As explained above, this approach uses the
weights of the trained classification layer for a convo-
lutional layer applied to the extracted feature map to
generate a map of discriminative regions. This map
is thresholded to generate values that are used as a
basis for calculating bounding boxes or segmentation
maps. Based on CAMs, there have been further de-
velopments in the area of WSOL (Singh and Lee,
2017; Zhang et al., 2018b,c; Choe and Shim, 2019;
Yun et al., 2019). One approach, for example, tack-
les the task by adversarially erasing discriminative re-
gions (Zhang et al., 2018b), while another one tries
to generate additional pseudo-pixel-wise annotations
on the fly via self-produced guidance (Zhang et al.,
2018c). Further approaches apply novel data aug-
mentation techniques to distribute the discriminative
regions over the image more equally, for example, ei-
ther by dropping parts of the images (Singh and Lee,
2017; Choe and Shim, 2019) or cutting and pasting
parts of images (Yun et al., 2019).
However, while on public datasets seemingly bet-
ter results were achieved in the last years using ap-
proaches like those mentioned before, Choe et al.
(2020) analyzed the most recent approaches and
found that most improvements over the original CAM
paper (Zhou et al., 2016) were primarily due to usu-
ally prohibited hyperparameter optimization on the
test set. They found that no significant improvement
over the CAM method was achieved when compared
on equal grounds. They also proposed several novel
metrics to evaluate the quality of the localizations dis-
entangled from the classification accuracy, which was
commonplace before.
In this work, we will focus on the CAM method
itself, instead of merely building on it, and utilize the
localization metrics proposed by Choe et al. (2020).
We also use a comparably simple occlusion augmen-
tation similar to several methods mentioned above,
namely Cutout (DeVries and Taylor, 2017), primarily
to find potential synergies with the pooling methods
investigated in this work.
Improved CAM Methods. Several methods have
been proposed to improve the output of the CAM ap-
proach, either for localization, or for better visual in-
terpretation. To this end, multiple approaches include
gradients into the CAM computation (Selvaraju et al.,
2017; Chattopadhay et al., 2018; Fu et al., 2020),
while others use score weighting (Wang et al., 2020),
ablation techniques (Ramaswamy et al., 2020), or
even principal components (Muhammad and Yeasin,
2020). These approaches, however, aim at improving
the CAMs after training, while we modify the output
of the CAMs indirectly by training the network in a
different way such that it learns better localizations
implicitly.
Log-Sum-Exp Pooling. We found that applying the
log-sum-exp function as a pooling operation has only
been rarely done in previous work. A variation of it,
a log-mean-exp pooling function referred to as Al-
phaMEX, has been successfully applied by Zhang
et al. (2018a) in classification, however not in WSOL
as it is the case in our work. In WSOL, the log-sum-
exp function has been investigated by Pinheiro and
Collobert (2015), who applied it to aggregate score
maps into class scores. In contrast, we apply it di-
rectly to the feature maps in place of global aver-
age pooling. We selected log-sum-exp pooling due
to its similarity to global max pooling, which is the
usual alternative to global average pooling. Log-sum-
exp pooling offers a differentiable, parameter-free ap-
proximation to global max pooling and therefore is a
natural choice to use in this place. While there is also
a multitude of other pooling methods previously pro-
posed (Christlein et al., 2019; Gao et al., 2016; Simon
et al., 2017), but not utilized in WSOL, we will leave
the investigation of these methods for future work.
3 OUR APPROACH
Class activation mapping (CAM) introduced by Zhou
et al. (2016) is the basis for our method. In the CAM
method, a CNN is first trained on a classification task
using the standard network scheme for classification.
That is, the network comprises three parts: a back-
bone for extracting features in a pixel-wise manner, a
pooling layer, usually global average pooling (GAP),
and a single classification layer, which is typically a
fully connected layer applied on the pooled feature
activations. After training the classifier, the pooling
layer is left out, and the weights learned for the fully
connected classification layer are applied directly to
the unpooled activations extracted from the backbone.
This results in a class activation map highlighting
class-relevant regions in the images by high activa-
tions for the respective class.
In contrast to GAP, we investigate the usage of two
alternative pooling methods. We do this as GAP has
certain limitations that can be circumvented with al-
ternative pooling strategies. We also implement Fea-
ture Pyramid Networks (FPNs) (Lin et al., 2017a) as
an alternative way to increase the output resolution of
the CAM. FPNs include features from different stages
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
182

in the network in the final feature representation in
contrast to upscaled versions of the last layers. Hence,
FPNs might be advantageous for object localization.
Finally, we also explore the already existing Cutout
augmentation method (DeVries and Taylor, 2017) in
conjunction with our investigated pooling layers, as
it is a simple method to mask out parts of the im-
ages, and the individual pooling methods might ben-
efit from this kind of augmentation.
3.1 Pooling Methods
In this section, we introduce the three pooling meth-
ods we are interested in, and explain the intuitions be-
hind them.
Global Average Pooling (GAP). GAP is defined as
GAP(F) =
1
W · H
W
∑
x=1
H
∑
y=1
F
x,y
, (1)
with F ∈ R
W ×H×C
representing the input feature map,
and x and y the coordinates for the different spatial
locations. W , H and C represent the width, height
and depth (i.e., the number of channels) of F, re-
spectively. GAP is the pooling layer usually applied
in most classification networks. However, we argue
that it is not the optimal choice for localization tasks.
During training for a classification task, the network
aims at maximizing the feature score for the target
class while minimizing the scores for the remaining
classes. If we consider that the final classification
layer contains the weight vector w ∈ R
C
for a target
class, then the class score s can be calculated as
s = w
T
f =
∑
c
w
c
· f
c
, (2)
with f = GAP(F) and f ∈ R
C
. To maximize this score
for the target class, f has to be maximized in all chan-
nels c that are deemed to be relevant for this class
with respect to the weights w. This results in the net-
work trying to maximize the activations of these rele-
vant channels over all locations in the feature map F.
As most current networks have rather large receptive
fields, neighboring pixels in F usually have a simi-
lar view on the input image and can hence potentially
extract very similar features. Due to the abovemen-
tioned procedure, the GAP layer encourages the ex-
traction of similar features, which, in the end, can lead
to strongly inaccurate CAMs for localization.
Global Max Pooling (GMP). To counter the above-
mentioned limitation of GAP, we consider GMP as
an alternative. Using the notation introduced before,
GMP can be defined as
GMP(F) = max
x,y
F
x,y
. (3)
As GMP does not contain an averaging operation, the
abovementioned inaccuracy should not be a problem
here. However, GMP has its own issues. As men-
tioned in (Zhou et al., 2016), GMP usually focuses
only on a small number of points in an image, which
is also suboptimal for good localization maps. While
we aim to counter this problem with occlusion aug-
mentations of the input image, namely Cutout (De-
Vries and Taylor, 2017) (see Section 3.3), we investi-
gate log-sum-exp pooling as another alternative.
Global Log-Sum-Exp Pooling (GLSEP). GLSEP is
an approximation of GMP and defined as
GLSEP(F) = log
W
∑
x=1
H
∑
y=1
expF
x,y
. (4)
While GLSEP approximates GMP, it still aggregates
information from the entire feature map similar to
GAP. Hence, it can be viewed as a compromise be-
tween GMP and GAP. Moreover, while it aggregates
information over the whole feature map, the detri-
mental effect from GAP should not occur here too
strongly, due to the log-sum-exp function weighting
higher activations stronger than lower ones, which
likely reduces the effect. Hence, GLSEP has the abil-
ity to focus on multiple high activations during train-
ing, instead of only single ones like GMP, while also
not increasing low-activations by the same amount as
high ones, as GAP does.
3.2 Feature Pyramid Networks
Feature Pyramid Networks (FPNs) have been intro-
duced by Lin et al. (2017a). The general idea of
this network architecture is to upscale feature maps
from deeper layers of common classification net-
works (e.g., ResNets (He et al., 2016)) and con-
nect them with information from features from earlier
stages of the network, which usually have higher reso-
lution but lower semantic value. These networks gen-
erate very rich feature maps at a high resolution that
contain not only highly meaningful semantic infor-
mation for distinguishing classes, but also low-level
information for object parts and borders, which en-
able more accurate localizations of the objects. For
this reason, FPNs are utilized, for instance, in fully
supervised object detection (Lin et al., 2017a,b) and
instance segmentation (He et al., 2017; Kirillov et al.,
2019). However, while used in their fully supervised
counterparts, to the best of our knowledge, FPNs have
not seen much attention in the area of weakly super-
vised learning. An overview of our combined method
is depicted in Figure 1.
Beyond Global Average Pooling: Alternative Feature Aggregations for Weakly Supervised Localization
183

3.3 Cutout
Cutout is a data augmentation method introduced by
DeVries and Taylor (2017) in 2017. When applied to
an input image, a random part of the image is masked
out and replaced, e.g., with a black square or rectan-
gle, forcing the network to learn features not lying in
this specific area. This regularizes the network and
encourages it to learn a wider variety of features, re-
sulting in more robust representations. In the case of
WSOL, this leads to higher class activations in less
discriminative regions of the image and vice versa.
While other augmentation methods apply similar oc-
cluding augmentations (Singh and Lee, 2017; Choe
and Shim, 2019; Yun et al., 2019), we choose this one
due to its simplicity.
4 EXPERIMENTS
We first describe the evaluation methods and datasets
for our experiments. Afterwards, we specify our ex-
perimental setup and present results for comparing the
different approaches.
4.1 Evaluation
Our evaluation is based on the recent work of Choe
et al. (2020). They argued that the classification abil-
ity of a network should not be included in the evalu-
ation of the WSOL performance and also suggested
that hyperparameter optimization should be done on
an image set independent from the test set. To this
end, they extended three datasets, two of which we
utilize in this work, by adding a validation set with
ground truth localizations. Moreover, they proposed
several novel metrics for evaluating WSOL. It should
be noted that these metrics are gt-known metrics, i.e.,
the identity of the class is known and plays no role
during evaluation.
The first metric we use is called MaxBoxAccV2
and was designed for evaluating bounding boxes only.
It analyses the score maps generated by the CAMs
and uses them to create bounding boxes for fur-
ther evaluation. These bounding boxes are selected
based on three different intersection over union (IoU)
thresholds with the ground-truth boxes (0.3, 0.5, 0.7),
and the results of these three thresholds are averaged
to obtain a single value. For details of this metric, we
refer to (Choe et al., 2020).
The second metric is the pixel average precision
PxAP, used for evaluating the quality of single-class
segmentation maps. It is defined as the area under the
precision-recall curve generated by the thresholded
CAM score maps for different thresholds. For the ex-
act definition of this metric, we again refer to (Choe
et al., 2020).
4.2 Datasets
In our experiments, we utilize the augmented CUB
(Wah et al., 2011) and OpenImages (Benenson et al.,
2019) dataset versions proposed by Choe et al. (2020).
Caltech-UCSD Birds-200-2011 (CUB). CUB (Wah
et al., 2011) is a popular fine-grained classification
dataset, which is also commonly used for evaluation
in WSOL. It comprises 200 bird species with 5,994
images for training and 5,794 for testing. Choe et al.
(2020) collected 1,000 additional images as a vali-
dation set, and provide corresponding bounding box
annotations. In our experiments, we use the annota-
tions of the validation set for hyperparameter tuning
only. The results on this dataset are evaluated using
the MaxBoxAccV2 metric.
OpenImages. The OpenImages dataset proposed by
Choe et al. (2020) is a subset of the one introduced
in (Benenson et al., 2019). It encompasses images of
100 general object classes, split into 29,819 images
for training, 2,500 for validating, and 5,000 for test-
ing. In contrast to the CUB dataset, the annotations
are segmentation maps for the objects in the images.
As in the original OpenImages dataset, images often
contain multiple different classes. Choe et al. (2020)
cropped these images such that there is only a single
class contained in each image. For the evaluation on
this dataset, we use the PxAP metric.
4.3 Setup
We use the same basic setup for all our experiments.
For training the networks, we use the SGD optimizer,
a batch size of 32, and an input size for the network
of 224 × 224, which is obtained by random cropping
from an original image size of 256 × 256. We further
use random horizontal flipping and, depending on the
experiment, Cutout as data augmentations. We train
our models similar to the training scheme presented
by Choe et al. (2020), i.e., we train for 50 and 10
epochs on CUB and OpenImages, respectively, and
reduce the learning rate by a factor of 0.1 every 15
and 3 epochs, respectively.
For our training, we have two to three hyperpa-
rameters: learning rate, weight decay, and optionally
the maximum size of Cutout. For each pair of dataset
and pooling method, we determine a suitable combi-
nation of learning rate, weight decay, and maximum
Cutout size. This is done by randomly sampling val-
ues for these parameters 30 times, training the net-
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
184

work for the abovementioned number of epochs, and
selecting the best parameters based on the respective
localization metric evaluated on the validation sets.
This is done for every setup. For more details on
the hyperparameter search, we would like to refer to
the Appendix. Furthermore, in our experiments, we
use a ResNet50 (He et al., 2016) initialized with Ima-
geNet (Russakovsky et al., 2015) weights as provided
by the Pytorch framework (Paszke et al., 2019). As
Choe et al. (2020) mentioned, it is commonplace in
WSOL to increase the output resolution of the net-
work by removing the strides in the last network lay-
ers. Hence, as done in (Choe et al., 2020), for our
experiments on OpenImages we removed the strides
for the last convolutional block, and additionally the
ones of the second-to-last block for the experiments
on CUB, doubling and quadrupling the output reso-
lution, respectively. In addition to this, to also have
a more direct comparison of the effect of a doubled
output resolution between CUB and OpenImages, we
also ran experiments on CUB with only double the
resolution, which was not done in (Choe et al., 2020).
In the experiments with FPN, we use the network in
its original form, using only the FPN to increase the
output resolution to 2, 4, and 8 times the original reso-
lution for the FPN layers P4, P3 and P2, respectively.
A Note on Hyperparameters. In order to repro-
duce our results, it should be noted that the hyper-
parameters for the different methods differ strongly
from each other. Especially notable are the frequent
requirements for strong weight decay for GMP and
GLSEP (partially > 1 exp−2) and the small learning
rate requirements for GLSEP (≈ 1e − 5).
4.4 Impact of Feature Pyramid
Networks
In our experiments, we first investigate the potential
benefits of FPNs for WSOL. To this end, we compare
the results of a standard ResNet50 (He et al., 2016)
with an enlarged output feature map and a ResNet50
using an FPN with extraction layers P4, P3, and P2,
as defined in the original paper (Lin et al., 2017a),
using a depth of 512. The results of this comparison
are shown in Table 1.
CUB. As mentioned above, for CUB, we investigated
two different kinds of enlarged output feature maps:
the quadruple enlargement, as done in (Choe et al.,
2020), and a double enlargement, as done in the ex-
periments on the OpenImages dataset. We observe a
positive influence of the FPN for GMP and GAP, how-
ever, with different best-performing layers for each
pooling method. For example, for GAP, the FPN
layer yielding the best results is the P3 layer, where a
MaxBoxAccV2 of 63.88 and 64.86 is achieved with-
out and with Cutout usage, respectively. For GMP, in
turn, the P4 layer yields the best results, achieving up
to 66.09 MaxBoxAccV2 and hence outperforming all
other combinations. For GLSEP, the doubly enlarged
ResNet50 without FPN yields the best results, while
the quadruply enlarged one performed the worst. The
differences in the top-performing FPN layer for each
method can likely be explained by looking at the lo-
calization performance conditions of the single meth-
ods. As GMP does not aggregate information over
a larger area in contrast to GAP, its localizations are
more accurate for lower-resolution features with more
semantic meaning. The same goes for GLSEP, which
does aggregate information over a larger area, but
only in a reduced amount compared to GAP due to
different implicit weighting in the log-sum-exp func-
tion. Therefore, GMP and GLSEP find the optimal
balance between localization features and semantic
features in a lower-resolution layer than GAP. In addi-
tion to this, the results suggest that a lower resolution
of the feature maps synergizes better with GLSEP.
Furthermore, it should be noted that, while the P3
layer has the same output resolution as the ResNet50
with a four times enlarged output feature map for
CUB (28 × 28), the performance using the P3 layer
is greater. This shows that the resolution is not the
most important factor for good localization, but other
factors like the semantics of the features play a signif-
icant role as well.
OpenImages. On the OpenImages dataset, neither
the GAP baseline nor GLSEP shows improvements
when using the FPN, resulting in a top PxAP of 59.00
and 61.76, respectively. In contrast, GMP gains an
increase of PxAP from 61.60 to 62.01.
The good performance of GAP and GLSEP using
only the original network features can be explained
through the bigger objects in the OpenImages dataset,
which strongly differ from the ones contained in the
CUB dataset. For localizing or segmenting the big-
ger objects, finer-grained features are not necessary,
and more coarse-grained localizations are sufficient.
While GMP also achieves good results without FPN,
it appears to also get use out of the very fine-grained
features of the P2 FPN layer, which are likely too
noisy for area aggregation pooling methods like GAP
and GLSEP.
4.5 Pooling Layer Comparison
We now compare the different pooling methods based
on the results shown in Table 1. Overall, we find
that the performance of the different pooling layers
depends strongly on the dataset, primarily due to the
Beyond Global Average Pooling: Alternative Feature Aggregations for Weakly Supervised Localization
185

Table 1: The results of our experiments using a ResNet50 and a Feature Pyramid Network using three different extraction
layers. All experiments are averaged over five runs. Top results are marked in bold. Experiments marked with (2x) and (4x)
represent models with doubled or quadrupled output resolution by stride removal. The setups with (4x) on CUB and (2x) on
OpenImages are the ones used in (Choe et al., 2020).
Network Pooling
CUB
(MaxBoxAccV2)
OpenImages
(PxAP)
No Cutout Cutout No Cutout Cutout
ResNet50
without FPN (4x)
GAP 62.22 ± 0.19 62.66 ± 0.21 - -
GMP 51.00 ± 0.82 55.67 ± 0.82 - -
GLSEP 43.13 ± 1.79 51.45 ± 1.05 - -
ResNet50
without FPN (2x)
GAP 59.38 ± 0.85 63.09 ± 0.65 59.00 ± 0.28 57.37 ± 0.12
GMP 58.13 ± 0.53 62.14 ± 1.06 61.60 ± 0.15 57.97 ± 1.58
GLSEP 56.86 ± 0.74 59.31 ± 1.06 61.76 ± 0.15 61.45 ± 0.25
ResNet50
+ FPN (P2)
GAP 59.40 ± 0.84 64.33 ± 0.77 57.63 ± 0.29 58.44 ± 0.24
GMP 63.03 ± 0.96 64.04 ± 0.71 62.01 ± 0.33 60.44 ± 0.26
GLSEP 53.26 ± 0.68 55.73 ± 0.43 56.32 ± 0.08 56.26 ± 0.24
ResNet50
+ FPN (P3)
GAP 63.88 ± 0.73 64.86 ± 0.53 56.04 ± 0.13 57.98 ± 0.43
GMP 61.68 ± 1.11 64.79 ± 1.27 59.15 ± 0.57 60.02 ± 0.25
GLSEP 54.58 ± 0.43 56.59 ± 0.31 57.42 ± 0.11 57.44 ± 0.26
ResNet50
+ FPN (P4)
GAP 59.92 ± 1.26 63.25 ± 0.81 57.60 ± 0.30 57.72 ± 0.36
GMP 63.16 ± 1.55 66.09 ± 0.34 59.31 ± 0.32 58.27 ± 0.11
GLSEP 56.16 ± 0.64 57.05 ± 0.69 57.32 ± 0.27 57.88 ± 0.18
granularity and size of the objects, as well as the func-
tionality of the respective pooling method. During
training, CNNs typically focus on the most discrim-
inative parts of the objects. CUB is a typical fine-
grained dataset and therefore only has subtle differ-
ences between the different classes, resulting in the
detected discriminative areas being very small. Open-
Images contains more general objects, for which the
full extent can be viewed as discriminative area. Due
to the functionality of CAM, the network will mainly
mark the areas it considers to be discriminative for
the class in question as localization area. As men-
tioned above, GMP and GLSEP are more precise than
GAP, and therefore mark only the small discrimina-
tive parts of the object during localization. The above-
mentioned impreciseness of GAP leads to it marking
areas larger than the small discriminative regions and
therefore marking a bigger part of the object in the
localization map. This leads to GAP outperforming
the alternative strategies on CUB with no additional
augmentation.
This impreciseness, however, is disadvantageous
on OpenImages, where already most of the object’s
extent is utilized during classification and therefore
also localization, leading to both GMP and GLSEP
outperforming GAP with PxAPs of 61.60 and 61.76,
respectively. This assessment is also supported by the
experiments including Cutout (DeVries and Taylor,
2017) usage. Cutout usually leads to a stronger focus
on the complete object instead of only the most dis-
criminative parts. Hence, it leads to an improvement
for all methods only on the CUB dataset, resulting
in GMP outperforming both alternative methods with
FPN layer P4 with a MaxBoxAccV2 of 66.09. On
OpenImages, the effect of Cutout is negligible or even
detrimental, as the focus already lies on the whole ex-
tent of the object. This leads to GMP performing best
using FPN layer P2 without Cutout (PxAP 62.01). An
overview and comparison of qualitative results gener-
ated by the methods can be found in the Appendix.
Comparison with State-of-the-Art Methods. We
also compare our results with the ones presented in
(Choe et al., 2020), as well as the newer methods
from (Bae et al., 2020), (Ki et al., 2020) and (Kim
et al., 2021). The results of the comparison can be
seen in Table 2. We observe that our proposed ap-
proaches result in significant improvements over the
GAP baselines from (Choe et al., 2020) and lead to
larger differences compared to competing methods.
On the CUB dataset, besides the baseline, we out-
perform all competing methods, with the exception
of HaS (Singh and Lee, 2017) and IVR (Kim et al.,
2021). On OpenImages, our methods outperform ev-
ery competing approach by a large margin. It should
be noted that GLSEP without bells and whistles leads
to a new state-of-the-art result on OpenImages, which
is only outperformed by the combination of FPN and
GMP, raising the new state-of-the-art even further.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
186

Table 2: Comparison of the relative improvements of the results shown in (Choe et al., 2020) and other previous works with
our best results using GMP and GLSEP. The network used is a ResNet50 in all cases. The topmost values used for comparison
have been taken from (Choe et al., 2020).
Method
CUB
(MaxBoxAccV2)
OpenImages
(PxAP)
GAP (Zhou et al., 2016) 63.0 58.5
HaS (Singh and Lee, 2017) +1.7 -2.6
ACoL (Zhang et al., 2018b) +3.5 -1.2
SPG (Zhang et al., 2018c) -2.6 -1.8
ADL (Choe and Shim, 2019) -4.6 -3.3
CutMix (Yun et al., 2019) -0.2 -0.8
Bae et al.(Bae et al., 2020) - +2.4
Ki et al.(Ki et al., 2020) +0.2 -
IVR (Kim et al., 2021) +3.83 +0.47
GMP + FPN (P4) + Cutout (Ours) +3.09 -0.23
GMP + FPN (P2) (Ours) +0.03 +3.51
GLSEP (No FPN) (Ours) -3.69 +3.26
5 CONCLUSIONS
In this paper, we investigated alternative pooling
strategies as a replacement for global average pool-
ing in neural networks for weakly supervised object
localization, namely global max pooling and global
log-sum-exp pooling. This has been done in conjunc-
tion with adding a Feature Pyramid Network, where
we have been able to increase the output resolution of
the network to obtain more precise localizations and
study the influence of the different pooling strategies.
We found that on CUB, the Feature Pyramid Network
alone in conjunction with global average pooling can
already bring improvements. However, the combi-
nation of Cutout and global max pooling with the
Feature Pyramid Network outperforms all other alter-
natives by a large margin. On OpenImages, global
log-sum-exp pooling alone already outperforms the
global average pooling baseline by a large margin.
In conjunction with Feature Pyramid Network, global
max pooling improves the results even further, set-
ting a new state-of-the-art. Regarding Cutout, we
found that it primarily improves the results in a fine-
grained setting, where the network’s focus usually lies
on a small discriminative area. Here, at the exam-
ple of CUB, Cutout helped to distribute the network
focus over the complete objects, improving localiza-
tion. However, as seen on the OpenImages dataset, for
objects with more apparent features, its effect on the
performance is either negligible or even detrimental.
All in all, our experiments confirmed that global aver-
age pooling is suboptimal for correct localization, and
global max pooling, as well as global log-sum-exp
pooling, situationally offer better alternatives. Our
approach is a potential basis for the development of
further advanced methods in the area of weakly su-
pervised object localization. In future work, it would
be interesting to study parameterized versions of the
alternative pooling strategies in order to further opti-
mize them concerning dedicated model design objec-
tives.
ACKNOWLEDGEMENTS
Matthias K
¨
orschens thanks the Carl Zeiss Foundation
for the financial support.
REFERENCES
Bae, W., Noh, J., and Kim, G. (2020). Rethinking class ac-
tivation mapping for weakly supervised object local-
ization. In European Conference on Computer Vision,
pages 618–634. Springer.
Benenson, R., Popov, S., and Ferrari, V. (2019). Large-scale
interactive object segmentation with human annota-
tors. In Proceedings of the IEEE Conference on Com-
puter Vision and Pattern Recognition (CVPR), pages
11700–11709.
Chattopadhay, A., Sarkar, A., Howlader, P., and Balasub-
ramanian, V. N. (2018). Grad-cam++: Generalized
gradient-based visual explanations for deep convolu-
tional networks. In Proceedings of the IEEE Win-
ter Conference on Applications of Computer Vision
(WACV), pages 839–847.
Choe, J., Oh, S. J., Lee, S., Chun, S., Akata, Z., and Shim,
H. (2020). Evaluating weakly supervised object lo-
calization methods right. In Proceedings of the IEEE
Conference on Computer Vision and Pattern Recogni-
tion (CVPR), pages 3133–3142.
Beyond Global Average Pooling: Alternative Feature Aggregations for Weakly Supervised Localization
187

Choe, J. and Shim, H. (2019). Attention-based dropout
layer for weakly supervised object localization. In
Proceedings of the IEEE Conference on Computer Vi-
sion and Pattern Recognition (CVPR), pages 2219–
2228.
Christlein, V., Spranger, L., Seuret, M., Nicolaou, A., Kr
´
al,
P., and Maier, A. (2019). Deep generalized max
pooling. In 2019 International Conference on Docu-
ment Analysis and Recognition (ICDAR), pages 1090–
1096.
DeVries, T. and Taylor, G. W. (2017). Improved regular-
ization of convolutional neural networks with cutout.
arXiv preprint arXiv:1708.04552.
Fu, R., Hu, Q., Dong, X., Guo, Y., Gao, Y., and Li, B.
(2020). Axiom-based grad-cam: Towards accurate vi-
sualization and explanation of cnns. arXiv preprint
arXiv:2008.02312.
Gao, Y., Beijbom, O., Zhang, N., and Darrell, T. (2016).
Compact bilinear pooling. In Proceedings of the IEEE
Conference on Computer Vision and Pattern Recogni-
tion (CVPR), pages 317–326.
He, K., Gkioxari, G., Doll
´
ar, P., and Girshick, R. (2017).
Mask r-cnn. In Proceedings of the IEEE International
Conference on Computer Vision (ICCV), pages 2961–
2969.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Proceedings of
the IEEE Conference on Computer Vision and Pattern
Recognition (CVPR), pages 770–778.
Ki, M., Uh, Y., Lee, W., and Byun, H. (2020). In-
sample contrastive learning and consistent attention
for weakly supervised object localization. In Proceed-
ings of the Asian Conference on Computer Vision.
Kim, J., Choe, J., Yun, S., and Kwak, N. (2021). Normaliza-
tion matters in weakly supervised object localization.
In Proceedings of the IEEE/CVF International Con-
ference on Computer Vision, pages 3427–3436.
Kirillov, A., Girshick, R., He, K., and Doll
´
ar, P. (2019).
Panoptic feature pyramid networks. In Proceedings of
the IEEE Conference on Computer Vision and Pattern
Recognition (CVPR), pages 6399–6408.
Lin, T.-Y., Doll
´
ar, P., Girshick, R., He, K., Hariharan, B.,
and Belongie, S. (2017a). Feature pyramid networks
for object detection. In Proceedings of the IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 2117–2125.
Lin, T.-Y., Goyal, P., Girshick, R., He, K., and Doll
´
ar, P.
(2017b). Focal loss for dense object detection. In
Proceedings of the IEEE International Conference on
Computer Vision (ICCV), pages 2980–2988.
Muhammad, M. B. and Yeasin, M. (2020). Eigen-cam:
Class activation map using principal components. In
2020 International Joint Conference on Neural Net-
works (IJCNN), pages 1–7.
Paszke, A., Gross, S., Massa, F., Lerer, A., Bradbury, J.,
Chanan, G., Killeen, T., Lin, Z., Gimelshein, N.,
Antiga, L., Desmaison, A., Kopf, A., Yang, E., De-
Vito, Z., Raison, M., Tejani, A., Chilamkurthy, S.,
Steiner, B., Fang, L., Bai, J., and Chintala, S. (2019).
Pytorch: An imperative style, high-performance deep
learning library. In Wallach, H., Larochelle, H.,
Beygelzimer, A., d'Alch
´
e-Buc, F., Fox, E., and Gar-
nett, R., editors, Advances in Neural Information Pro-
cessing Systems 32, pages 8024–8035. Curran Asso-
ciates, Inc.
Pinheiro, P. O. and Collobert, R. (2015). From image-level
to pixel-level labeling with convolutional networks. In
Proceedings of the IEEE Conference on Computer Vi-
sion and Pattern Recognition (CVPR), pages 1713–
1721.
Ramaswamy, H. G. et al. (2020). Ablation-cam: Vi-
sual explanations for deep convolutional network via
gradient-free localization. In Proceedings of the IEEE
Winter Conference on Applications of Computer Vi-
sion (WACV), pages 983–991.
Russakovsky, O., Deng, J., Su, H., Krause, J., Satheesh, S.,
Ma, S., Huang, Z., Karpathy, A., Khosla, A., Bern-
stein, M., et al. (2015). Imagenet large scale visual
recognition challenge. International Journal of Com-
puter Vision, 115(3):211–252.
Selvaraju, R. R., Cogswell, M., Das, A., Vedantam, R.,
Parikh, D., and Batra, D. (2017). Grad-cam: Visual
explanations from deep networks via gradient-based
localization. In Proceedings of the IEEE International
Conference on Computer Vision (ICCV), pages 618–
626.
Simon, M., Gao, Y., Darrell, T., Denzler, J., and Rodner, E.
(2017). Generalized orderless pooling performs im-
plicit salient matching. In Proceedings of the IEEE
International Conference on Computer Vision (ICCV),
pages 4960–4969.
Singh, K. K. and Lee, Y. J. (2017). Hide-and-seek: Forc-
ing a network to be meticulous for weakly-supervised
object and action localization. In Proceedings of the
IEEE International Conference on Computer Vision
(ICCV), pages 3544–3553.
Wah, C., Branson, S., Welinder, P., Perona, P., and Be-
longie, S. (2011). The caltech-ucsd birds-200-2011
dataset.
Wang, H., Wang, Z., Du, M., Yang, F., Zhang, Z., Ding, S.,
Mardziel, P., and Hu, X. (2020). Score-cam: Score-
weighted visual explanations for convolutional neural
networks. In Proceedings of the IEEE Conference on
Computer Vision and Pattern Recognition Workshops
(CVPR-WS), pages 24–25.
Yun, S., Han, D., Oh, S. J., Chun, S., Choe, J., and Yoo,
Y. (2019). Cutmix: Regularization strategy to train
strong classifiers with localizable features. In Pro-
ceedings of the IEEE International Conference on
Computer Vision (ICCV), pages 6023–6032.
Zhang, B., Zhao, Q., Feng, W., and Lyu, S. (2018a). Al-
phamex: A smarter global pooling method for convo-
lutional neural networks. Neurocomputing, 321:36–
48.
Zhang, X., Wei, Y., Feng, J., Yang, Y., and Huang, T. S.
(2018b). Adversarial complementary learning for
weakly supervised object localization. In Proceedings
of the IEEE Conference on Computer Vision and Pat-
tern Recognition (CVPR), pages 1325–1334.
Zhang, X., Wei, Y., Kang, G., Yang, Y., and Huang,
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
188

T. (2018c). Self-produced guidance for weakly-
supervised object localization. In Proceedings of the
European Conference on Computer Vision (ECCV),
pages 597–613.
Zhou, B., Khosla, A., Lapedriza, A., Oliva, A., and Tor-
ralba, A. (2016). Learning deep features for discrim-
inative localization. In Proceedings of the IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 2921–2929.
APPENDIX
Hyperparameter Search
As mentioned in the main paper, our hyperparameter
search was conducted by random sampling pairs or
triples of parameters from certain intervals, depend-
ing on the experimental setting. The hyperparameters
we sampled are learning rate, weight decay, and the
Cutout (DeVries and Taylor, 2017) max size. Dur-
ing training, the size of the Cutout-square was also
sampled from the interval (0.0, maxsize), which rep-
resents sizes relative to the maximum size of the im-
age.
The learning rate and the weight decay were sam-
pled from a log-uniform distribution over the inter-
vals (1e-5, 1.0) and (1e-7, 1e-1), respectively. The
Cutout maximum size was sampled uniformly from
the interval (0.0, 0.5). It should be noted that for
the quadruple enlargement experiment using GLSEP
without Cutout we chose the log-uniform interval of
(1e-7, 0.01), as otherwise the network diverged.
Example Heatmaps
A selection of example heatmaps comparing our
combined approach using global log-sum-exp pool-
ing (GLSEP) and global max pooling (GMP) with
the standard class activation mapping (CAM) (Zhou
et al., 2016) approach using global average pooling
(GAP) is shown in Figure 2 for the CUB dataset and
in Figure 3 for the OpenImages dataset.
In general, we notice that the heatmaps using GAP
are often very accurate already. However, on many
occasions, as mentioned above, it focuses too strongly
on few discriminative areas. In several other exam-
ples from Figure 2, it includes the environmental sur-
roundings of the objects, like water. We also note that
both are not the case for GMP and GLSEP in any of
the images. This leads to GMP generating better lo-
calizations in several cases. GLSEP performs drasti-
cally differently on both datasets, as also seen in the
quantitative results in Table 1. While on CUB, it does
not have the same problems as GAP, its localization
is often widely inexact, strongly focusing on the most
discriminative parts of the object. On OpenImages in
Figure 3, however, it is often more accurate than both
competing methods. Here, it often matches almost the
exact shape of the object. In several instances, it ap-
pears to also focus too strongly on the most discrimi-
native areas, leading to GMP outperforming it.
To summarize, in these qualitative results, we also
observe the benefits of our approach compared to the
standard CAM + GAP approach.
Beyond Global Average Pooling: Alternative Feature Aggregations for Weakly Supervised Localization
189
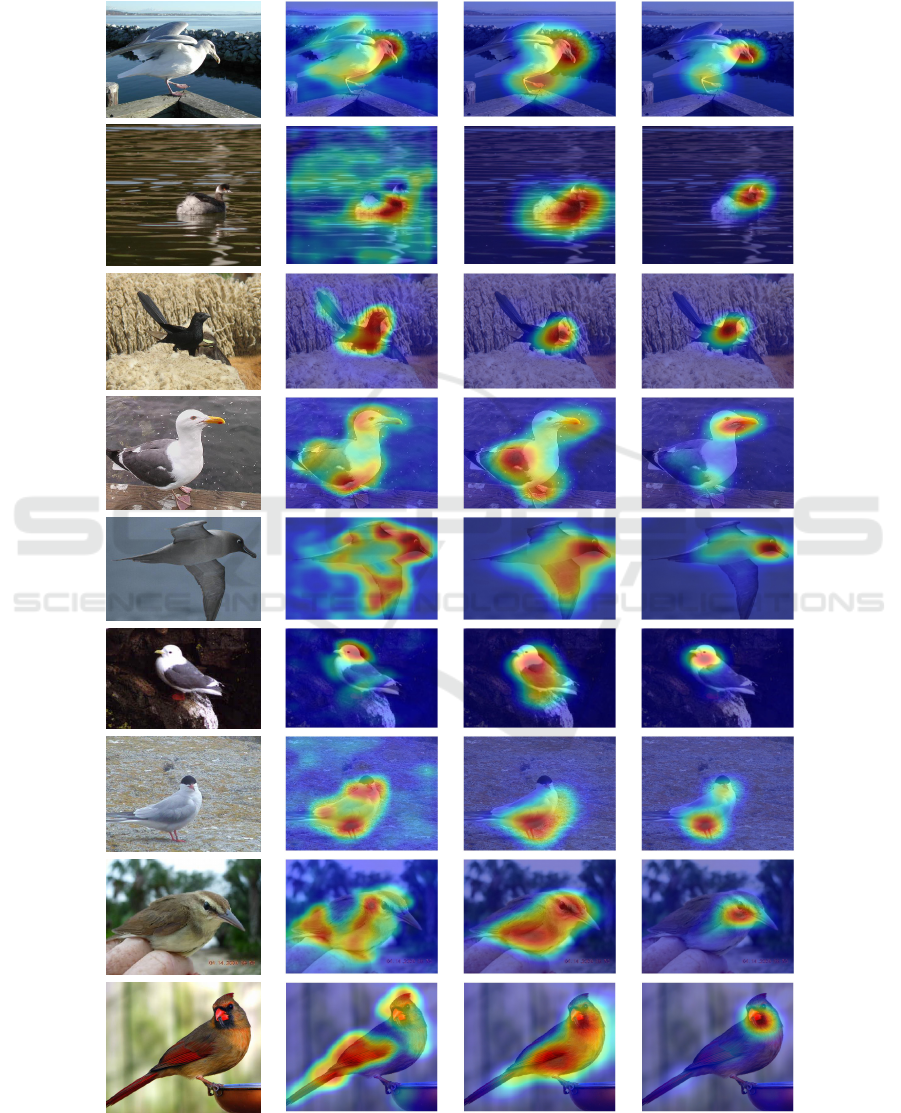
Original
Image
CAM
+ GAP
CAM
+ GMP
+ FPN (P4)
+ Cutout
CAM
+ GLSEP
+ Cutout
Figure 2: Example heatmaps from the CUB dataset using different setups. The CAM + GAP column represents the baseline
approach using vanilla CAM without FPN and Cutout.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
190
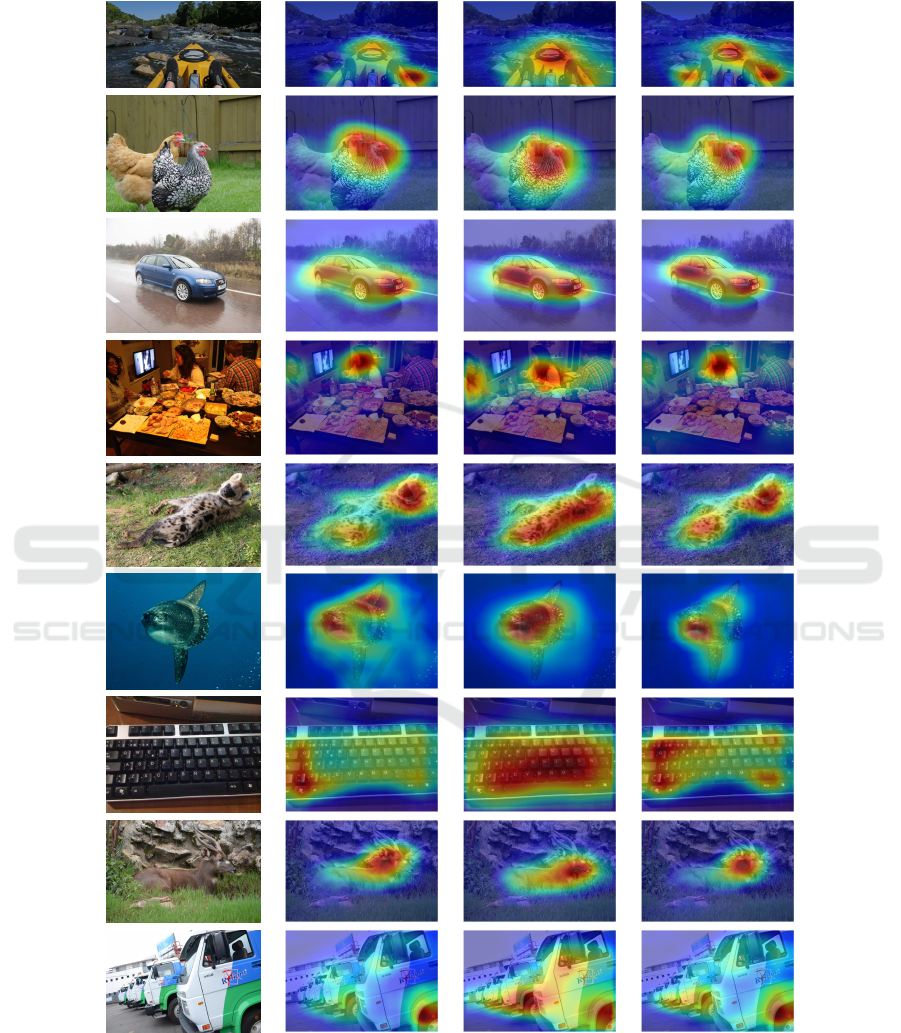
Original
Image
CAM
+ GAP
CAM
+ GMP
+ FPN (P2)
CAM
+ GLSEP
Figure 3: Example heatmaps from the OpenImages dataset using different setups. The CAM + GAP column represents the
baseline approach using vanilla CAM without FPN and Cutout.
Beyond Global Average Pooling: Alternative Feature Aggregations for Weakly Supervised Localization
191
