
Scan2Part: Fine-grained and Hierarchical
Part-level Understanding of Real-World 3D Scans
Alexandr Notchenko,Vladislav Ishimtsev, Alexey Artemov, Vadim Selyutin, Emil Bogomolov
and Evgeny Burnaev
Skolkovo Institute of Science and Technology, Moscow, Russian Federation
Keywords:
Semantic Segmentation, Scene Understanding, Volumetric Scenes, Part-level Segmentation.
Abstract:
We propose Scan2Part, a method to segment individual parts of objects in real-world, noisy indoor RGB-D
scans. To this end, we vary the part hierarchies of objects in indoor scenes and explore their effect on scene
understanding models. Specifically, we use a sparse U-Net-based architecture that captures the fine-scale detail
of the underlying 3D scan geometry by leveraging a multi-scale feature hierarchy. In order to train our method,
we introduce the Scan2Part dataset, which is the first large-scale collection providing detailed semantic labels
at the part level in the real-world setting. In total, we provide 242,081 correspondences between 53,618
PartNet parts of 2,477 ShapeNet objects and 1,506 ScanNet scenes, at two spatial resolutions of 2 cm
3
and
5 cm
3
. As output, we are able to predict fine-grained per-object part labels, even when the geometry is coarse
or partially missing. Overall, we believe that both our method as well as newly introduced dataset is a stepping
stone forward towards structural understanding of real-world 3D environments.
1 INTRODUCTION
In the recent years, a wide variety of consumer-grade
RGB-D cameras such as Intel Real Sense (Kesel-
man et al., 2017), Microsoft Kinect (Zhang, 2012), or
smartphones equipped with depth sensors, enabled in-
expensive and rapid RGB-D data acquisition. Increas-
ing availability of large, labeled datasets (e.g., (Chang
et al., 2017; Dai et al., 2017)) made possible develop-
ment of deep learning methods for 3D object classifi-
cation and semantic segmentation. At the same time,
acquired 3D data is often incomplete and noisy; while
one can identify and segment the objects in the scene,
reconstructing high-quality geometry of objects re-
mains a challenging problem.
An important class of approaches, e.g., recent
work (Avetisyan et al., 2019), uses a large dataset of
clean, labeled geometric shapes (Chang et al., 2015),
for classification/segmentation associating the input
point or voxel data with object labels from the dataset,
along with adapting geometry to 3D data. This ap-
proach ensures that the output geometry has high
quality, and is robust with respect to noise and miss-
ing data in the input. At the same time, a “flat” classi-
fication/segmentation approach, with each object in
the database corresponding to a separate label and
matched to a subpart of the input data corresponding
to the whole object, does not scale well as the num-
ber of classes grows and often runs into difficulties in
the cases of extreme occlusion (only a relatively small
part of an object is visible). Significant improvements
can be achieved by considering object parts, or, more
generally, part hierarchies. Part-based segmentation
of 3D datasets promises to offer a significant improve-
ment in a variety of tasks such as finding the best
matching shape in the dataset or recognizing objects
from highly incomplete data (e.g., from one or two
parts).
Man-made environments (e.g., indoor scenes)
commonly consist of objects that naturally form part
hierarchies where objects and their parts can be di-
vided into finer parts. In our work, we use scene
and object representation based on such part hierar-
chies and focus on the key problem of semantic part
segmentation of separate objects in the scenes, en-
abling further improvements in dataset-based recon-
struction. To this end, we construct a volumetric part-
labeled dataset of scanned 3D data suitable for ma-
chine learning applications. We use this new dataset
to explore the limits of part-based semantic segmen-
tation by training a variety of sparse 3D convolutional
neural networks (CNNs) in multiple setups.
Our contributions include:
Notchenko, A., Ishimtsev, V., Artemov, A., Selyutin, V., Bogomolov, E. and Burnaev, E.
Scan2Part: Fine-grained and Hierarchical Part-level Understanding of Real-World 3D Scans.
DOI: 10.5220/0010848200003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 5: VISAPP, pages
711-722
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
711

1. A new method Scan2Part, aiming to segment vol-
umetric objects into semantic parts and their in-
stances, leveraging a sparse volumetric 3D CNN
model trained on a large-scale part-annotated col-
lection of objects.
2. A new dataset Scan2Part, composed of 1,506 3D
reconstructions of real-world scenes with 2,477
aligned 3D CAD models represented by real-
world 3D geometry and annotated using hierar-
chical annotation, which links 3D scene recon-
struction with part-annotation of indoor objects.
2 RELATED WORK
Deep Learning for 3D Scene Understanding. Deep
learning has been applied for semantic 3D scene un-
derstanding in a variety of ways, and we only review
the core work related to the semantic and instance
segmentation of 3D scenes. Most relevant to our
work, deep learning approaches have been used on
3D reconstructions of scenes represented by 3D volu-
metric grids (Dai et al., 2017; Dai and Nießner, 2018;
Hou et al., 2019; Liu and Furukawa, 2019). For vol-
umetric grid, 3D convolutions may be defined anal-
ogously to 2D convolutions in image domains, giv-
ing rise to 3D convolutional neural nets (3D CNNs).
Memory requirements have been addressed by adap-
tive data structures (Wang et al., 2017). Similar to
this body of work, we operate on volumetric repre-
sentations of 3D scenes, but perform segmentation of
individual parts.
Methods operating on raw point clouds provide
an alternative to volumetric 3D CNNs by construct-
ing an appropriate operations directly on unstruc-
tured point clouds for a variety of applications in-
cluding semantic labeling (e.g., (Qi et al., 2017a; Qi
et al., 2017b; Klokov and Lempitsky, 2017; Wang
et al., 2018; Wang et al., 2019b)). Most recently, in-
stance (Elich et al., 2019; Liang et al., 2019; Elich
et al., 2019; Yi et al., 2019; Yang et al., 2019; Zhang
and Wonka, 2019; Engelmann et al., 2020) and joint
semantic-instance (Wang et al., 2019a; Pham et al.,
2019b) segmentation tasks on point clouds have been
considered closely. While point-based methods re-
quire less computations, learning with irregular struc-
tures such as point clouds is challenging. To segment
instances, recently proposed volumetric and point-
based approaches use metric learning to extract per-
point embeddings that are subsequently grouped into
object instances (Elich et al., 2019; Yi et al., 2019;
Lahoud et al., 2019; Liu and Furukawa, 2019). We
take advantage of this mechanism in our instance seg-
mentation methods.
Part-aware segmentation methods commonly fo-
cus on meshes or complete, clean point clouds con-
structed from 3D CAD models. The most closely re-
lated work is semantic parts labeling (e.g., (Yi et al.,
2016; Wang et al., 2017; Qi et al., 2017a; Mo et al.,
2019b; Yi et al., 2019; Zhang and Wonka, 2019))
and part instance segmentation (Zhang and Wonka,
2019) for voxelized or point-sampled 3D shapes.
Other works focus on leveraging parts structure of
clean shapes for co-segmentation (Chen et al., 2019;
Zhu et al., 2019), hierarchical mesh segmentation (Yi
et al., 2017), shape assembly/generation (Mo et al.,
2019a; Wu et al., 2019b; Wu et al., 2019a; Mo et al.,
2020), geometry abstraction (Russell et al., 2009; Li
et al., 2017; Sun et al., 2019), and other applications.
In comparison, our focus is on learning part-based se-
mantic and instance segmentation of noisy and frag-
mented real-world 3D scans. Very recently, initial ap-
proaches to semantic 3D segmentation have been pro-
posed (Bokhovkin et al., 2021; Uy et al., 2019) but
for a significantly less extensive part hierarchy. More
specifically, (Bokhovkin et al., 2021) targets predict-
ing part hierarchy at object and coarse parts levels,
discarding smaller parts altogether; in contrast, we are
able to predict parts at finer levels in the hierarchy.
Other methods have been studied in the context
of 3D scene segmentation, such as complementing
CNNs with conditional random fields (Pham et al.,
2019b; Pham et al., 2019a; Wang et al., 2017), how-
ever, these are beyond the scope of this paper.
3D Scene Understanding Datasets. A body of work
focuses on rendering-based methods, aiming to realis-
tic 3D scenes procedurally (Fisher et al., 2012; Handa
et al., 2016; Song et al., 2017; McCormac et al.,
2017; Li et al., 2018; Garcia-Garcia et al., 2018).
Such datasets can in principle provide arbitrarily fine
semantic labels but commonly suffer from the real-
ity gap caused by synthetic images; in contrast, our
proposed dataset is built by transferring part annota-
tions to real-world noisy scans. Recent advances in
RGB-D sensor technology have resulted in the de-
velopment of a variety of 3D datasets capturing real
3D scenes (Armeni et al., 2016; Hua et al., 2016;
Dai et al., 2017; Chang et al., 2017; Armeni et al.,
2017; Straub et al., 2019), however, none of these
provide part-level object annotations. In contrast, our
dataset provides semantic and instance part labels for
a large-scale collection of indoor 3D reconstructions.
ScanObjectNN (Uy et al., 2019) provides parts an-
notation for objects in real-world scenes, however, it
does not include annotations in occluded regions and
only specifies parts labeling at the coarsest levels in
the parts hierarchy. Thus, this collection thus does not
allow reasoning about the fine grained structure of the
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
712
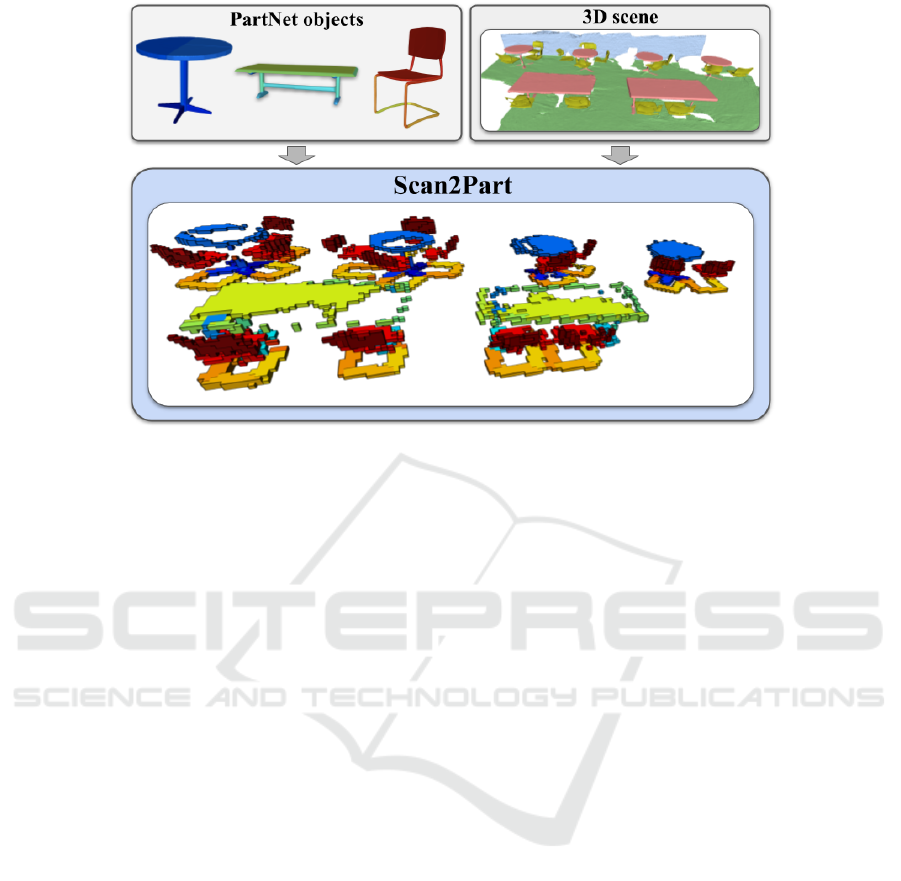
Figure 1: A pipeline for obtaining Scan2Part dataset. We project the PartNet (Mo et al., 2019b) labels to the ShapeNet (Chang
et al., 2015) coordinate system (left), then use alignments in Scan2CAD (Avetisyan et al., 2019) (bottom) to map labels to
real indoor scenes from ScanNet (Dai et al., 2017) (right).
objects; differently, our data construction approach al-
lows to flexibly select part representation levels, and
our experiments include results for 13, 36, and 79 part
categories at first through third levels in the hierarchy.
Early collections of part-annotated meshes (Chen
et al., 2009) are limited by their relatively smaller
scale. With the introduction of a comprehensive
ShapeNet benchmark (Chang et al., 2015), a coarse
semantic part annotation has been created using active
learning (Yi et al., 2016). More recently, a large-scale
effort to systematically annotate 3D shapes within a
coherent hierarchy was presented (Mo et al., 2019b).
Still, none of these CAD-based collections include
real-world 3D data, limiting their potential use. Our
benchmark is designed to address this reality gap.
Large-scale 3D understanding datasets commonly
require costly manual annotations by tens to hundreds
of expert crowd workers (annotators), preceded by
the development of custom labeling software (Armeni
et al., 2016; Hua et al., 2016; Dai et al., 2017; Chang
et al., 2017; Armeni et al., 2017; Straub et al., 2019;
Yi et al., 2016; Mo et al., 2019b). Moreover, anno-
tating parts in 3D objects from scratch is connected
to inherent ambiguity in part definitions, as revealed
by (Yi et al., 2016; Mo et al., 2019b). This chal-
lenge is even more pronounced for noisy, incomplete
3D scans produced by RGB-D fusion. We have cho-
sen to instead build our Scan2Part dataset fully au-
tomatically by leveraging correspondences between
four publicly available 3D collections: ScanNet (Dai
et al., 2017), Scan2CAD (Avetisyan et al., 2019),
ShapeNet (Chang et al., 2015), and PartNet (Mo et al.,
2019b) datasets. As a result, we (1) become free from
ambiguity in part definitions by re-using consistent,
well-defined labels from (Mo et al., 2019b), and (2)
are able to compute appropriate levels of semantic de-
tail for our benchmark without manual re-labeling.
Assembly from Parts and Hierarchy. A lot of re-
searchers over the last 20 years came to the idea
that scenes and images are better represented as dis-
crete structures with relational and hierarchical prop-
erties. New datasets that make explicit relations on
visual objects were created recently (Krishna et al.,
2017), spurring new research in scene graphs (John-
son et al., 2018; Xu et al., 2017) and reconstruction.
In cognitive science, it have been conjectured for a
long time that ability to compose complex objects
and scenes from parts is a fundamental part of human
perception (Hoffman and Richards, 1984; Biederman,
1987). The concept of ”Recognition-by-components”
is closely related to ”analysis-by-synthesis” (Yuille
and Kersten, 2006; Yildirim et al., 2015) approach
in machine learning. Mumford and Zhu in (Zhu and
Mumford, 2006) assume that spatial scenes can be
defined by a ”grammar” of spatial objects and geo-
metric primitives, similar to sentences in natural lan-
guage, where a sequence of words can have multiple
parsing trees providing multiple explanations to sin-
gle sentence. Multiple solutions are expected because
solving an under-constrained inverse problem (in this
case inverse graphics problem) can have multiple so-
lutions. The solution can be made unique either with
stronger priors or can be resolved in downstream pro-
cessing if uncertainty is propagated.
Scan2Part: Fine-grained and Hierarchical Part-level Understanding of Real-World 3D Scans
713

3 METHOD
3.1 Dataset Construction
Data Preparation. Our first objective is to develop a
large-scale 3D scene understanding dataset with part-
level annotations. We use the 3D geometry in 1,506
3D scenes in Scannet dataset (Dai et al., 2017) recon-
structed from RGB-D scans in the form of truncated
Signed Distance Function (SDF) at voxel resolution
= 2 cm and 5 cm. For labeling the scan geometry, we
use the parts taxonomy in PartNet dataset (Mo et al.,
2019b) represented as a tree structure where nodes en-
code parts at various detail levels and edges encode
the “part of” relationship. We associate to each 3D
scene a per-voxel mask storing leaf part IDs from the
taxonomy (i.e., the most fine-grained categories). To
label the 3D scene at a given level d of semantic de-
tail (d = 1 meaning whole objects and d = 8 meaning
finest parts), we start with the leaf labels in each voxel
and traverse the taxonomy tree until hitting depth d.
We further describe the main steps taken to create
our Scan2Part benchmark below, leaving the detailed
discussion of the technicalities for the supplementary.
Annotation schema for our dataset is shown in Fig-
ure 1. The final result of our procedure is a collection
of scenes comprised of volumetric instances of sepa-
rate objects, where background and non-object infor-
mation is removed, allowing to focus on part based
segmentation.
Transferring Labels to Volumetric 3D Grids. To
obtain ground-truth semantic parts annotations for
real-world 3D scenes, we establish correspondences
between each volume in the 3D scene in Scannet and
a set of part-annotated mesh vertices in a registered
3D CAD model from PartNet. To this end, we first
find accurate 9 degrees of freedom (9 DoF) transfor-
mations between PartNet 3D models and their orig-
inal versions from ShapeNet, and next use the man-
ually annotated 9 DoF transformations and their re-
spective object categories provided by Scan2CAD to
obtain the final scan-to-part alignments. We further
perform a simple majority voting, selecting only the
most frequent (among the vertices) part label as the
ground truth voxel label.
This procedure results in 242,081 correspon-
dences represented as 9 DoF transformations between
1,506 reconstructions of real-wold Scannet scenes
and 53,618 unique parts of 2,477 ShapeNet objects.
Parts of each object have a tree structure, similar
to (Mo et al., 2019b). Note that the majority-based
voting implementation of annotation transfer results
in some semantic parts labels not being represented
in the 3D scan, ultimately affecting parts taxonomy,
which we discuss below.
Parts Taxonomy Processing. The taxonomy of
3D shape parts is represented as a single tree struc-
ture based on (Mo et al., 2019b). However, as the
voxel resolution of the real-world 3D scan is relatively
coarse, particular part categories (e.g., small shape de-
tails such as keyboard buttons or door handles) cannot
be represented by sufficient number of 3D data points,
thus implying a reduction in the original taxonomy.
We proceed with this reduction by first choosing an
appropriate occurrence threshold (we pick 1800 vox-
els, but demonstrate the effect of different threshold
values in the supplementary) and remove classes that
have smaller number of representatives in the dataset.
We finalize the taxonomy by pruning trivial paths in
the tree (i.e., if a vertex has only one child, then we
delete this vertex by connecting the child and the par-
ent of this vertex), but keeping the leaf labels intact.
We display the number of vertices at different gran-
ularities in the original and resulting part taxonomy
levels in Table 1. Some parts (leafs in the part tax-
onomy) are not represented in ScanNet data, so we
remove these from the tree. Figure 3 demonstrates
example annotations produced by our automatic pro-
cedure.
Table 1: Number of parts on each tree level.
Level
1 2 3 4 5 6 7 8
(object) (part)
Full Taxonomy 18 50 133 223 269 302 306 307
Pruned Taxonomy 13 36 79 — — — — —
To aid reproducibility, we will release all the nec-
essary code to combine datasets with minimal efforts
while respecting their licence terms.
3.2 Evaluation Protocol
Based on our dataset, we propose a novel benchmark
for part-level scan 3D understanding, offering three
core tasks, namely semantic labeling, hierarchical se-
mantic segmentation, and semantic instance segmen-
tation; we overview these tasks in the context of our
datasets below. As inputs in all tasks we supply the
voxelized SDF (with RGB information), represent-
ing 3D geometry and appearance of individual ob-
jects, already separated from the background voxels
in the scene. Note that our tasks are similar to part-
level object understanding but operate on real-world
3D shapes.
Evaluation Tasks. In semantic labeling, the goal
is to associate a set of n semantic part labels y
j
=
(y
d
1
j
,...,y
d
n
j
) with each voxel v
j
, at detail lev-
els d
1
,...,d
n
. Compared to object-level segmenta-
tion, the part-level task becomes even more challeg-
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
714
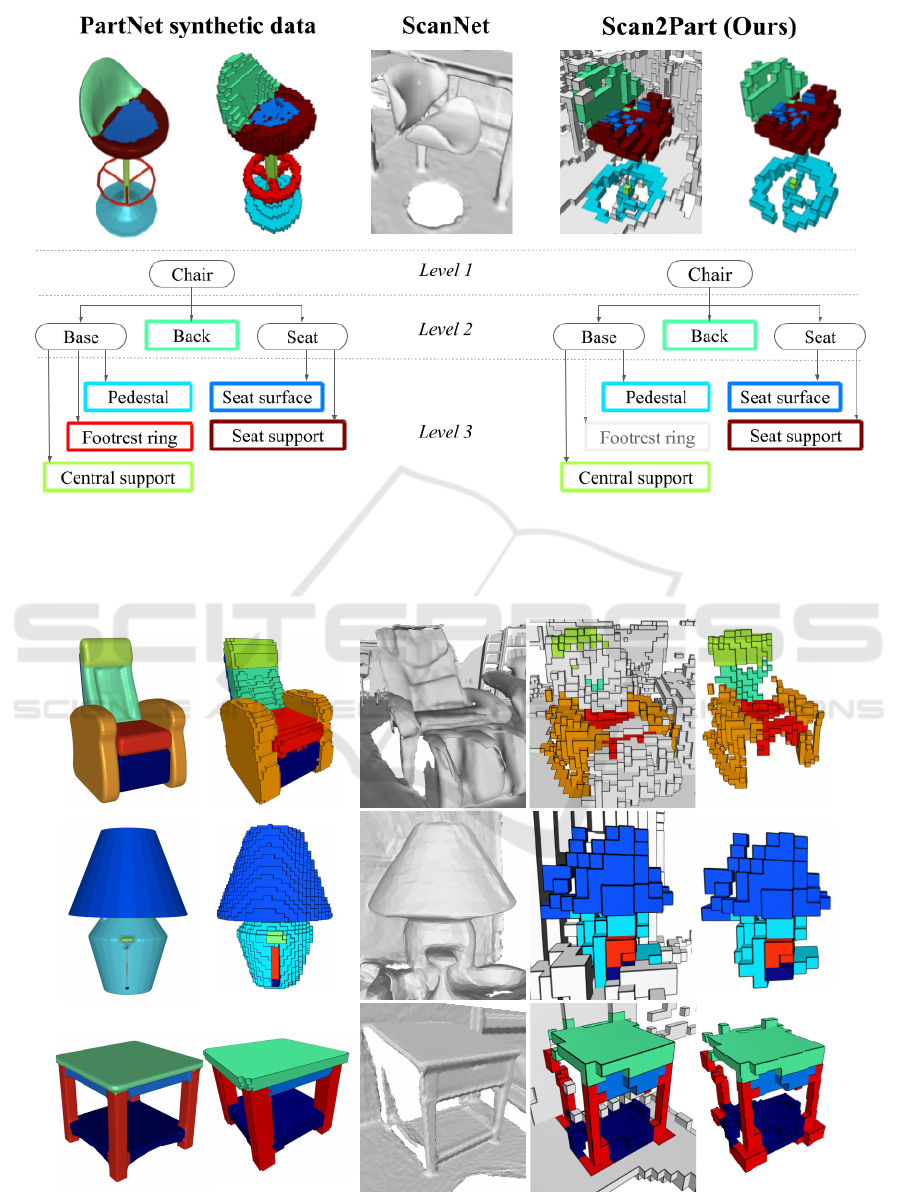
Figure 2: Top: our dataset is obtained by combining PartNet synthetic data with ScanNet sensor data. Bottom: the PartNet
object hierarchy is compressed to include only parts sufficiently well represented in ScanNet data.
PartNet synthetic data
ScanNet
Scan2Part (Ours)
Figure 3: Example annotations produced by our automatic procedure at the spatial resolution of 5 cm
3
. From left to right,
part-annotated meshes and voxelized shapes in PartNet; fragments of their respective reconstructions in ScanNet; voxelized
part-annotated shapes with and without background (non-object) voxels in Scan2Part.
Scan2Part: Fine-grained and Hierarchical Part-level Understanding of Real-World 3D Scans
715

ing, particularly at deeper levels in the taxonomy that
require predicting at increasingly more fine-grained
categories. We provide 1,506 scenes with 53,618
unique parts of 2,477 objects.
For hierarchical semantic segmentation, one must
perform segmentation at all levels in the hierarchy, in-
ferring labels in coarse- and fine-grained detail levels
simultaneously.
For instance segmentation, the goal is to simulta-
neously perform part-level semantic labeling and as-
sign each voxel v
j
a unique part instance ID (e.g., to
differentiate separate legs of a table).
For both semantic and instance segmentations
we follow original train/val division of Scannet
dataset (Dai et al., 2017).
The Choice of Scene Understanding Levels. We
evaluate the algorithms at three granularity levels
for each object category: coarse-, middle- and fine-
grained, roughly corresponding to evaluation in (Mo
et al., 2019b).
Quality Measures. We evaluate semantic labeling
and hierarchical segmentation models by inferring
the semantic labels for entire input scenes and com-
puting quality measures at each scene understand-
ing level d
k
separately. More specifically, for each
class c present in the set of classes C
k
at granularity
d
k
, we compute the standard Intersection over Union
score IoU
c
and the balanced accuracy score Acc
c
.
We report these per-class numbers along with mean
IoU and mean balanced accuracy averaged over C
k
:
mIoU
k
=
1
/n
k
∑
c∈C
k
IoU
c
, mAcc
k
=
1
/n
k
∑
c∈C
k
Acc
c
.
We additionally evaluate hierarchical semantic
segmentation by averaging mIoU over all hierarchy
levels k ∈ {1, . . . , K}.
Instance segmentation is assessed as object detec-
tion and thus evaluate this task using average pre-
cision (AP) with IoU threshold at 0.5. To generate
object hypotheses, each instance is checked against
a threshold of confidence equal to 0.25, to filter out
noisy voxels.
3.3 Proposed Approach
The input to all our models is the voxelized object
SDF, representing 3D geometry either with or without
associated RGB values.
Part-level 3D Understanding. To predict parts in
our multi-label formulation, we produce a set of soft-
max scores p
j
= (p
d
1
j
,..., p
d
n
j
). Our models for se-
mantic and instance segmentation tasks are 3D CNNs
identical in architecture up to the last layer. We
note that training a 3D CNN model for segmentation
is a computationally challenging problem; thus, we
opted to make it more tractable by using frameworks
for sparse differentiable computations. Specifically,
we use Minkowski Networks (Choy et al., 2019a;
Choy et al., 2019b), a popular sparse CNN backbone,
to implement large sparse fully-convolutional neu-
ral networks for geometric feature learning. We use
the Res16UNet34C architecture that showed state-of-
the-art performance on multiple scene understanding
tasks. For each input voxel, the network produces a
32-dimensional feature vector that is further appro-
priately transformed by the last layer, accommodating
a required number of predicted classes. All our net-
works are fully convolutional, enabling inference for
scenes with arbitrary spatial extents.
We train the network in multiple setups, differing
by the structure of supervision available to the net-
work, each time evaluating labeling performance at
each detail level d
i
. Specifically, we define our loss
function L to be a weighted sum of cross entropy
losses for each level of detail
L(p,y) =
K
∑
k=1
α
k
L
CE
(p
k
,y
k
) (1)
and specify a set of weighting schemes for α
1
,...,α
K
.
This loss structure allows expressing both “flat” seg-
mentation formulations (e.g., choosing α
k
= δ
ki
to
segment at level d
i
only), that we view as base-
lines, and multi-task formulations that integrate train-
ing signal across multiple levels of semantic detail.
Similarily to (Mo et al., 2019b), we approach
this task using bottom-up, and top-down methods.
Bottom-up method performs segmentation at the most
fine-grained level and propagates the labels to object
level, leveraging the taxonomy structure. Conversely,
the top-down approach infers labels first at coarse
level (starting with objects) and subsequently at finer
levels (parts), recursively descending along predicted
taxonomy branches. We note that multi-task training
using (1) also results in a hierarchical segmentation
method, and include it in the comparison.
Part Instance Segmentation. We employ a dis-
criminative loss function which has demonstrated
its effectiveness in previous works (De Brabandere
et al., 2017; Pham et al., 2019b) and integrates
intra-instance clustering and inter-instance separation
terms along with a small regularization component.
Compared to architectures that use region proposal
modules (Yi et al., 2019; Pham et al., 2019b; Engel-
mann et al., 2020), this results in a more computation-
ally lightweight architecture, while reducing instance
segmentation problem to a metric learning task. At in-
ference time, we cluster voxel feature vectors to pro-
duce part instances in a scene using mean-shift algo-
rithm (Comaniciu and Meer, 2002).
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
716

Figure 4: Histograms of object statistics for the coarsest (d = 1) level of details: LEFT: number of voxels per object, CENTER:
the number of corresponding objects in Scan2Part, RIGHT: the total number of object voxels in Scan2Part.
4 EXPERIMENTS
4.1 Experimental Setup
Data and Training. We select 80% of the scenes in
ScanNet for training, keeping 5% as a mini-validation
to tune hyperparameters, and put aside 20% scenes
for testing. Due to the high imbalance some classes
can be under-represented in a testset. Testset was se-
lected through iterative discrete optimization, using
desired 80/20 proportion through all classes (espe-
cially smaller ones).
We optimize our models using Adam (Kingma
and Ba, 2014), initializing learning rate proportion-
ally to the batch size with base learning rate = 0.003
and β
1
= 0.9, β
2
= 0.999. Learning rate during train-
ing follows Multi-step exponential decay schedule
with γ = 0.2, and a weight decay of 10
−4
. We train
until early stopping with patience parameter of 10, or
until we reach a maximum epoch limit of 200. De-
pending on the specific model training can take sev-
eral hours on our dedicated server equiped with 4
Nvidia GTX 1080.
Baselines. SparseConvNet (Graham et al., 2018) is
an implementation of sparse 3D CNNs; though it
has a smaller number of sparse layer types, it has
enough features to implement a U-Net style fully-
convolutional architecture we need to compute geo-
metric features of voxels. As a baseline, we also train
a Dense 3D CNN (Lee et al., 2017) model based on
U-Net architecture with ResNet blocks.
To train the baselines, we extract 16 volumetric
crops of size 64
3
from each voxelized scene and ran-
domly shuffle them across all scenes in the training
split. The batch size was selected from 4 to 48 in dif-
ferent experiments, subject to fitting the model into
the available GPU memory. Because this model’s im-
plementation requires slicing of the scene, it cannot
be evaluated for per-instance metrics.
Semantic Part Segmentation. Table 5 summarizes
our model specifications, differing by the choice of
weights in (1). The first three rows correspond to
training a single level-of-detail semantic segmenta-
tion model. The last three rows define a Multi-Task-
Training (MTT) objective where learned features of
the occupied voxels are projected using linear layers
to different level labels, and their loss functions are
combined for training.
Part Instance Segmentation. This task test the abil-
ity of our models to separate parts solely based on
their shape and mutual position within object, disre-
garding semantic class information.
Hierarchical Segmentation. Performing hierarchi-
cal segmentation of voxels in a scene according to a
taxonomy of objects and their parts described in 3.1 is
a challenging task that can be approached in different
ways:
• Top-Down. approach assigns labels to a voxel by
solving a sequence of smaller classification tasks.
This approach predicts the distribution of seman-
tic object labels first, followed by prediction of
first-level parts, and continuing until a voxel can
be assigned a leaf label from the taxonomy. Ev-
ery prediction produces SoftMax distribution over
possible sub-parts; voxels are masked based on
the ground truth of the ”parent” part during eval-
uation.
• Bottom-Up. A model predicts a leaf label to a
voxel on the finest level-of-detail, and semantic
part segmentation on any level-of-detail can be
computed by ”projecting” up. Probabilities of part
labels having the same ”parent” part are added to-
gether.
4.2 Comparative Studies
Can We Recognize Parts in Real-world Scans?
Table 4 demonstrates part-level semantic 3D under-
standing performance of our approach vs. the base-
line methods. We show that adding semantic informa-
tion from multiple levels of detail via part objectives
Scan2Part: Fine-grained and Hierarchical Part-level Understanding of Real-World 3D Scans
717
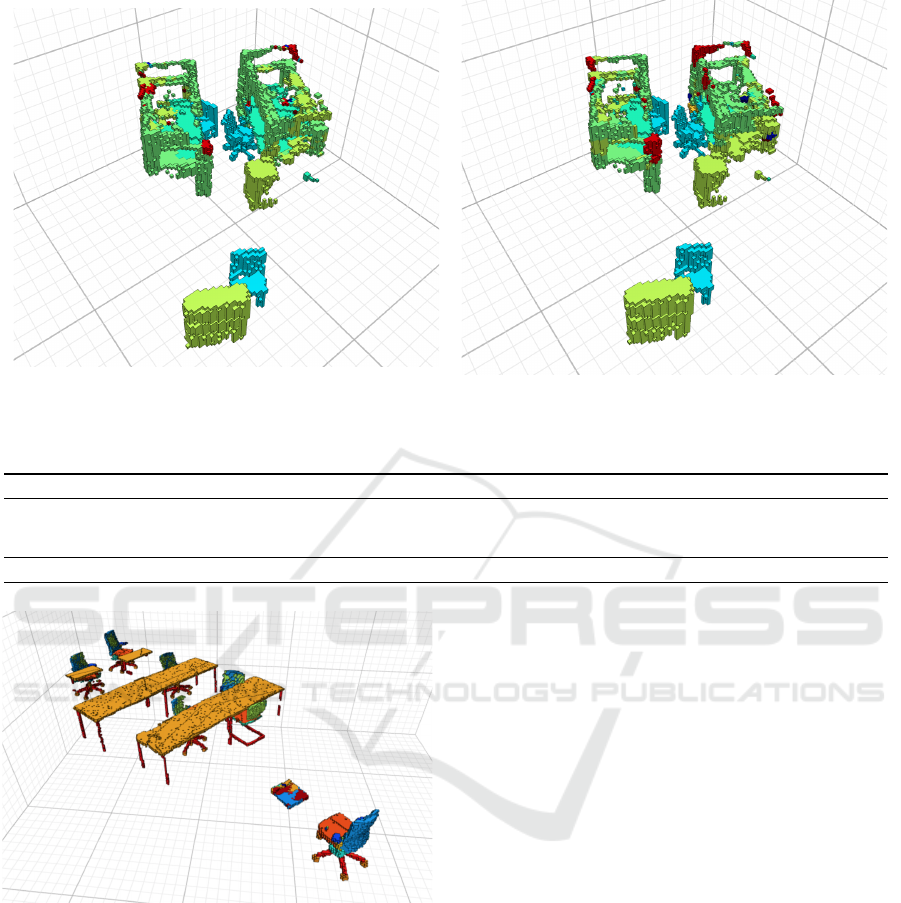
(a)
(b)
Figure 5: Semantic segmentation prediction from Minkowski Engine (a) and Submanifold (b) models.
Table 2: Instance segmentation results on levels d
1
, d
2
, and d
3
.
Model Lvl Micr. Disp. Lamp Lapt. Bag Stor. Bed Table Chair Dishw. Trash. Vase Keyb. Avg
Ours (w/ color) d
1
0.790 0.676 0.794 0.852 0.808 0.798 0.795 0.852 0.900 0.884 0.840 1.000 0.874 0.839
d
2
0.856 0.356 0.667 0.710 0.275 0.414 0.505 0.467 0.562 0.423 0.640 0.488 0.440 0.757
d
3
0.228 0.146 0.200 0.234 0.484 0.279 0.743 0.667 0.490 0.176 0.333 0.244 0.807 0.711
num. instances 142 26 11 33 496 69 543 754 6 199 9 18 21 179
Figure 6: Qualitative hierarchical semantic segmentation
results using our models, trained in each respective part-
category level and our proposed method. Note the segmen-
tation performance, particularly at finer levels in the parts
taxonomy.
in in (1) significantly improves models segmentation
performance across hierarchy levels.
Does Adding Part-level Annotation Improve
Object-level 3D Understanding? Table 3 demon-
strates results across different object classes and in
different inference setups obtained at the object-level
and lower level-of-detail.
Does Pre-training for Part Segmentation Help
Achieve Hierarchical / Instance Tasks? We present
performance of hierarchical semantic segmentation in
Table 3. Note that despite the baselines are focusing
solely on a single level of semantic detail, our method
is able to leverage a multi-task objective in (1) to per-
form more efficient segmentation.
Part Instance Segmentation Results. We present
instance segmentation results in Table 2, results indi-
cate that segmentation accuracy decreases when the
level of detail is reduced, presumably because object-
part-masks become more generic, closet to shape
primitives. The metric performs on par to the object
level on particular objects with less shape variability
(e.g., Bag, Bed, Table, Keyboard).
4.3 Ablative Studies
What is required for efficient part-level understand-
ing? The following ablations can inform to what is
more important in our problem domain.
Effect of Backbone Network. In Table 4 one can
see that having a sparse backbone is crucial to the se-
mantic segmentation ability of the model. There ex-
ists a moderate effect between model size/complexity
and performance. We are confident that we got close
to the limits of segmentation performance given the
quality of data in the benchmark.
Effect of Loss. Most of our models in Table 4 are
trained with weighted cross-entropy Loss to combat
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
718
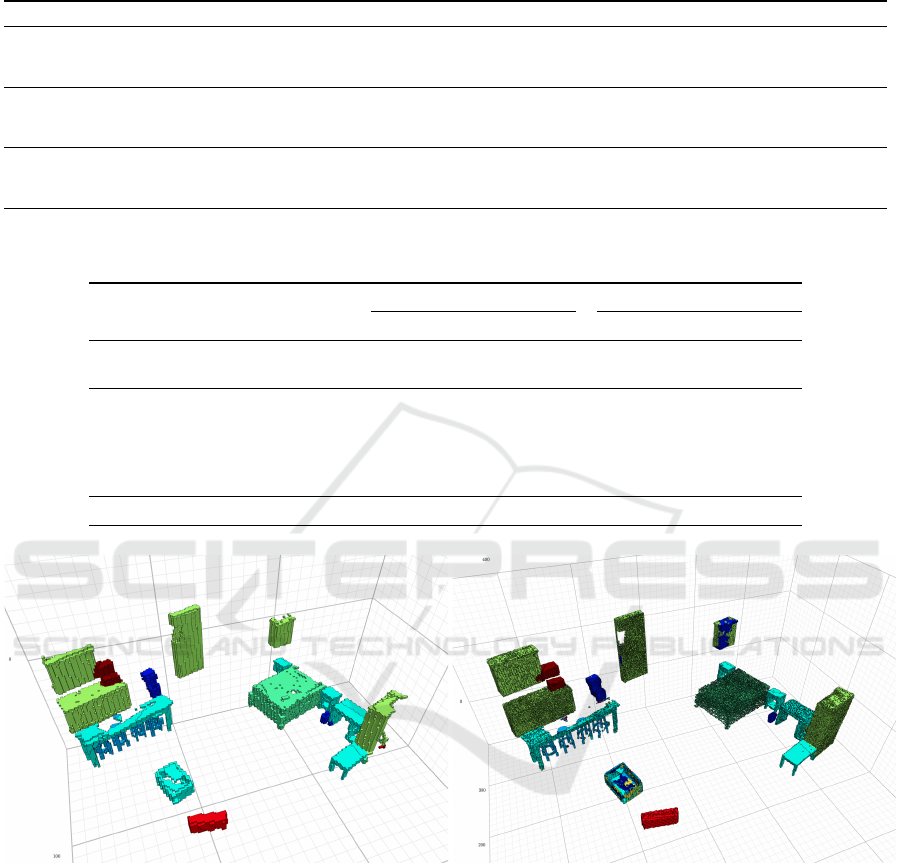
Table 3: Hierarchical semantic segmentation results in terms of mean IoU and mean balanced accuracy for different semantic
granularities. We include mIoU averaged over all hierarchy levels as an integral measure.
Model Lvl Micr. Disp. Lamp Lapt. Bag Stor. Bed Table Chair Dishw. Trash. Vase Keyb. Avg
Flat d1 0.408 0.704 0.558 0.202 0.581 0.811 0.777 0.783 0.896 0.003 0.639 0.403 0.112 0.529
d2 0.199 0.471 0.526 0.298 0.346 0.035 0.423 0.351 0.301 0.183 0.199 0.302 0.033 0.282
d3 0.070 0.262 0.380 0.170 0.214 0.213 0.231 0.344 0.193 0.000 0.102 0.208 0.029 0.186
Top-Down d1 0.099 0.266 0.079 0.091 0.338 0.431 0.281 0.527 0.610 0.009 0.276 0.054 0.019 0.237
d2 - 0.769 0.442 0.856 0.661 0.499 0.339 0.391 0.171 0.697 0.313 0.199 0.585 0.494
d3 - 0.522 0.631 0.439 0.529 0.288 - 0.741 0.355 0.682 0.402 - - 0.510
Bottom-Up d1 0.377 0.626 0.489 0.170 0.515 0.792 0.673 0.748 0.872 0.001 0.582 0.281 0.062 0.476
d2 0.188 0.469 0.000 0.041 0.155 0.053 0.006 0.126 0.147 0.000 0.064 0.063 0.031 0.102
d3 0.279 0.542 0.198 0.385 0.260 0.232 0.110 0.404 0.335 0.145 0.267 0.128 0.034 0.210
Table 4: Fine-grained semantic part segmentation performance in terms of mean IoU and mean per-Instance IoU for different
semantic granularities, using our model in various setups and baselines.
Categ. mIoU, % ↑ Inst. mIoU, % ↑
Method d
1
d
2
d
3
d
1
d
2
d
3
Dense 3D CNN (Lee et al., 2017) 0.225 0.131 0.058 - - -
SparseConvNet (Graham et al., 2018) 0.4212 0.2561 0.1789 0.7751 0.7151 0.4923
Ours (w/o color) 0.5179 0.2913 0.2185 0.8387 0.7219 0.5140
Ours (w/ color) 0.5290 0.2848 0.2231 0.8422 0.7217 0.5137
Ours (MTT balanced) 0.5209 0.3104 - 0.8364 0.7363 -
Ours (MTT fine-grained) 0.4953 0.2929 0.2123 0.8065 0.7217 0.5093
Ours (MTT coarse) 0.5091 0.2963 0.1886 0.841 0.7253 0.4414
Num. classes 13 36 79 13 36 79
(a) (b)
Figure 7: Semantic segmentation results for the same scene voxelized at 5 cm
3
(a) and 2 cm
3
(b) voxel resolution. Despite
coarser geometry yields somewhat more robust segmentation, it does not allow representing finer parts.
high unbalance for part labels in scenes. Training on
part segmentation in a multi-task setup with differ-
ent choices of objective weights has demonstrated a
trade-off in the effectiveness of the geometric features
and their ability to predict labels on different level-of-
details.
Effect of Color Information. Surprisingly, introduc-
ing color information only contributes slightly to the
performance of semantic part segmentation (see Ta-
ble 4). This result disagrees with the expectations that
voxel color would be a highly predictive factor for
part correspondence. We hypothesize that this could
be due to the high variability in lightning and acquisi-
tion conditions in the original ScanNet dataset.
Effect of Voxel Resolution. We conducted experi-
ments at a 2.5× finer voxel resolution of 2 cm
3
and
present their results in Table 6. Despite higher com-
plexity geometry, we have observed an improvement
in performance metrics across levels of detail. How-
ever, due to a significant increase in computational
Scan2Part: Fine-grained and Hierarchical Part-level Understanding of Real-World 3D Scans
719
Table 5: Our objective configurations in (1).
Configuration α
1
α
2
α
3
Base coarse 1 0 0
Base middle 0 1 0
Base fine 0 0 1
MTT-12 .5 .5 0
MTT-123-coarse .7 .2 .1
MTT-123-fine .1 .2 .7
Table 6: Our method is able to effectively work on vari-
ous voxel resolution leves. On 5cm resolution tipical train-
ing time for equal number of epochs increased from several
hours to a day.
Categ. mIoU, % ↑ Inst. mIoU, % ↑
Method d
1
d
2
d
3
d
1
d
2
d
3
Voxel size 5 cm
3
0.5179 0.2913 0.2185 0.8387 0.7219 0.5140
Voxel size 2 cm
3
0.6465 0.4138 0.3415 0.8958 0.8263 0.6295
Num. classes 13 36 79 13 36 79
requirements, we performed the majority of experi-
ments on the 5 cm
3
version of our dataset.
5 CONCLUSION
We introduced Scan2Part, a novel method and a chal-
lenging benchmark for part-level understanding of
real-world 3D objects. The core of our method is
to leverage structural knowledge of objects compo-
sition to perform a variety of segmentation tasks in
setting with complex geometry, high levels of uncer-
tainty due to noise. To achieve that, we explore the
part taxonomies of common objects in indoor scenes,
on multiple scales and methods of compressing them
for more effective use in machine learning applica-
tions. We demonstrated that specific ways of training
deep segmentation models like ours sparse Residual-
U-Net architecture on these novel tasks we introduced
are better at capturing inductive biases in structured
labels on some parts of a taxonomy but not the others.
Further research on relationships between structure of
real-world scenes and perception models is required
and we hope our benchmark and dataset will acceler-
ate it. In the near future we plan on releasing a sec-
ond version of the dataset with background of scenes
is not removed, so that and we can study performance
of our models in scenarios closer to raw sensor data.
ACKNOWLEDGEMENTS
This work has been supported by the Russian Science
Foundation under Grant 19-41-04109. The authors
acknowledge the use of Zhores (Zacharov et al., 2019)
for obtaining the results presented in this paper.
REFERENCES
Armeni, I., Sax, A., Zamir, A. R., and Savarese, S. (2017).
Joint 2D-3D-Semantic Data for Indoor Scene Under-
standing. ArXiv e-prints.
Armeni, I., Sener, O., Zamir, A. R., Jiang, H., Brilakis, I.,
Fischer, M., and Savarese, S. (2016). 3d semantic
parsing of large-scale indoor spaces. In Proceedings
of the IEEE Conference on Computer Vision and Pat-
tern Recognition, pages 1534–1543.
Avetisyan, A., Dahnert, M., Dai, A., Savva, M., Chang,
A. X., and Nießner, M. (2019). Scan2cad: Learning
cad model alignment in rgb-d scans. In Proceedings of
the IEEE Conference on Computer Vision and Pattern
Recognition, pages 2614–2623.
Biederman, I. (1987). Recognition-by-components: a the-
ory of human image understanding. Psychological re-
view, 94(2):115.
Bokhovkin, A., Ishimtsev, V., Bogomolov, E., Zorin, D.,
Artemov, A., Burnaev, E., and Dai, A. (2021). To-
wards part-based understanding of rgb-d scans. In
Proceedings of the IEEE/CVF Conference on Com-
puter Vision and Pattern Recognition, pages 7484–
7494.
Chang, A., Dai, A., Funkhouser, T., Halber, M., Niebner,
M., Savva, M., Song, S., Zeng, A., and Zhang, Y.
(2017). Matterport3d: Learning from rgb-d data in in-
door environments. In 2017 International Conference
on 3D Vision (3DV), pages 667–676. IEEE.
Chang, A. X., Funkhouser, T., Guibas, L., Hanrahan,
P., Huang, Q., Li, Z., Savarese, S., Savva, M.,
Song, S., Su, H., et al. (2015). Shapenet: An
information-rich 3d model repository. arXiv preprint
arXiv:1512.03012.
Chen, X., Golovinskiy, A., and Funkhouser, T. (2009). A
benchmark for 3D mesh segmentation. ACM Trans-
actions on Graphics (Proc. SIGGRAPH), 28(3).
Chen, Z., Yin, K., Fisher, M., Chaudhuri, S., and Zhang,
H. (2019). Bae-net: branched autoencoder for shape
co-segmentation. In Proceedings of the IEEE Interna-
tional Conference on Computer Vision, pages 8490–
8499.
Choy, C., Gwak, J., and Savarese, S. (2019a). 4d spatio-
temporal convnets: Minkowski convolutional neural
networks. In Proceedings of the IEEE Conference
on Computer Vision and Pattern Recognition, pages
3075–3084.
Choy, C., Park, J., and Koltun, V. (2019b). Fully convolu-
tional geometric features. In Proceedings of the IEEE
International Conference on Computer Vision, pages
8958–8966.
Comaniciu, D. and Meer, P. (2002). Mean shift: A robust
approach toward feature space analysis. IEEE Trans-
actions on pattern analysis and machine intelligence,
24(5):603–619.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
720

Dai, A., Chang, A. X., Savva, M., Halber, M., Funkhouser,
T., and Nießner, M. (2017). Scannet: Richly-
annotated 3d reconstructions of indoor scenes. arXiv
preprint arXiv:1702.04405.
Dai, A. and Nießner, M. (2018). 3dmv: Joint 3d-multi-
view prediction for 3d semantic scene segmentation.
In Proceedings of the European Conference on Com-
puter Vision (ECCV), pages 452–468.
De Brabandere, B., Neven, D., and Van Gool, L. (2017).
Semantic instance segmentation with a discriminative
loss function. arXiv preprint arXiv:1708.02551.
Elich, C., Engelmann, F., Schult, J., Kontogianni, T., and
Leibe, B. (2019). 3d-bevis: birds-eye-view instance
segmentation. arXiv preprint arXiv:1904.02199.
Engelmann, F., Bokeloh, M., Fathi, A., Leibe, B., and
Nießner, M. (2020). 3d-mpa: Multi proposal aggre-
gation for 3d semantic instance segmentation. arXiv
preprint arXiv:2003.13867.
Fisher, M., Ritchie, D., Savva, M., Funkhouser, T., and
Hanrahan, P. (2012). Example-based synthesis of 3d
object arrangements. In ACM SIGGRAPH Asia 2012
papers, SIGGRAPH Asia ’12.
Garcia-Garcia, A., Martinez-Gonzalez, P., Oprea, S.,
Castro-Vargas, J. A., Orts-Escolano, S., Garcia-
Rodriguez, J., and Jover-Alvarez, A. (2018). The
robotrix: An extremely photorealistic and very-large-
scale indoor dataset of sequences with robot trajecto-
ries and interactions. In 2018 IEEE/RSJ International
Conference on Intelligent Robots and Systems (IROS),
pages 6790–6797. IEEE.
Graham, B., Engelcke, M., and van der Maaten, L. (2018).
3d semantic segmentation with submanifold sparse
convolutional networks. CVPR.
Handa, A., Patraucean, V., Badrinarayanan, V., Stent, S.,
and Cipolla, R. (2016). Understanding real world in-
door scenes with synthetic data. In Proceedings of
the IEEE Conference on Computer Vision and Pattern
Recognition, pages 4077–4085.
Hoffman, D. D. and Richards, W. A. (1984). Parts of recog-
nition. Cognition, 18(1-3):65–96.
Hou, J., Dai, A., and Nießner, M. (2019). 3d-sis: 3d seman-
tic instance segmentation of rgb-d scans. In Proceed-
ings of the IEEE Conference on Computer Vision and
Pattern Recognition, pages 4421–4430.
Hua, B.-S., Pham, Q.-H., Nguyen, D. T., Tran, M.-K., Yu,
L.-F., and Yeung, S.-K. (2016). Scenenn: A scene
meshes dataset with annotations. In 2016 Fourth In-
ternational Conference on 3D Vision (3DV), pages
92–101. IEEE.
Johnson, J., Gupta, A., and Fei-Fei, L. (2018). Image gen-
eration from scene graphs. CoRR, abs/1804.01622.
Keselman, L., Iselin Woodfill, J., Grunnet-Jepsen, A., and
Bhowmik, A. (2017). Intel realsense stereoscopic
depth cameras. In Proceedings of the IEEE Con-
ference on Computer Vision and Pattern Recognition
Workshops, pages 1–10.
Kingma, D. P. and Ba, J. (2014). Adam: A
method for stochastic optimization. arXiv preprint
arXiv:1412.6980.
Klokov, R. and Lempitsky, V. (2017). Escape from cells:
Deep kd-networks for the recognition of 3d point
cloud models. In Proceedings of the IEEE Interna-
tional Conference on Computer Vision, pages 863–
872.
Krishna, R., Zhu, Y., Groth, O., Johnson, J., Hata,
K., Kravitz, J., Chen, S., Kalantidis, Y., Li, L.-
J., Shamma, D. A., et al. (2017). Visual genome:
Connecting language and vision using crowdsourced
dense image annotations. International Journal of
Computer Vision, 123(1):32–73.
Lahoud, J., Ghanem, B., Pollefeys, M., and Oswald, M. R.
(2019). 3d instance segmentation via multi-task met-
ric learning. In Proceedings of the IEEE International
Conference on Computer Vision, pages 9256–9266.
Lee, K., Zung, J., Li, P., Jain, V., and Seung, H. S. (2017).
Superhuman accuracy on the snemi3d connectomics
challenge. arXiv preprint arXiv:1706.00120.
Li, J., Xu, K., Chaudhuri, S., Yumer, E., Zhang, H., and
Guibas, L. (2017). Grass: Generative recursive au-
toencoders for shape structures. ACM Transactions
on Graphics (TOG), 36(4):52.
Li, W., Saeedi, S., McCormac, J., Clark, R., Tzoumanikas,
D., Ye, Q., Huang, Y., Tang, R., and Leutenegger, S.
(2018). Interiornet: Mega-scale multi-sensor photo-
realistic indoor scenes dataset. In British Machine Vi-
sion Conference (BMVC).
Liang, Z., Yang, M., and Wang, C. (2019). 3d graph em-
bedding learning with a structure-aware loss function
for point cloud semantic instance segmentation. arXiv
preprint arXiv:1902.05247.
Liu, C. and Furukawa, Y. (2019). Masc: multi-scale affinity
with sparse convolution for 3d instance segmentation.
arXiv preprint arXiv:1902.04478.
McCormac, J., Handa, A., Leutenegger, S., and J.Davison,
A. (2017). Scenenet rgb-d: Can 5m synthetic images
beat generic imagenet pre-training on indoor segmen-
tation?
Mo, K., Guerrero, P., Yi, L., Su, H., Wonka, P., Mitra, N.,
and Guibas, L. J. (2019a). Structurenet: Hierarchi-
cal graph networks for 3d shape generation. arXiv
preprint arXiv:1908.00575.
Mo, K., Wang, H., Yan, X., and Guibas, L. J. (2020). Pt2pc:
Learning to generate 3d point cloud shapes from part
tree conditions. arXiv preprint arXiv:2003.08624.
Mo, K., Zhu, S., Chang, A. X., Yi, L., Tripathi, S., Guibas,
L. J., and Su, H. (2019b). Partnet: A large-scale
benchmark for fine-grained and hierarchical part-level
3d object understanding. In Proceedings of the IEEE
Conference on Computer Vision and Pattern Recogni-
tion, pages 909–918.
Pham, Q.-H., Hua, B.-S., Nguyen, T., and Yeung, S.-K.
(2019a). Real-time progressive 3d semantic segmen-
tation for indoor scenes. In 2019 IEEE Winter Con-
ference on Applications of Computer Vision (WACV),
pages 1089–1098. IEEE.
Pham, Q.-H., Nguyen, T., Hua, B.-S., Roig, G., and Yeung,
S.-K. (2019b). Jsis3d: joint semantic-instance seg-
mentation of 3d point clouds with multi-task point-
wise networks and multi-value conditional random
Scan2Part: Fine-grained and Hierarchical Part-level Understanding of Real-World 3D Scans
721

fields. In Proceedings of the IEEE Conference
on Computer Vision and Pattern Recognition, pages
8827–8836.
Qi, C. R., Su, H., Mo, K., and Guibas, L. J. (2017a). Point-
net: Deep learning on point sets for 3d classification
and segmentation. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 652–660.
Qi, C. R., Yi, L., Su, H., and Guibas, L. J. (2017b). Point-
net++: Deep hierarchical feature learning on point sets
in a metric space. arXiv preprint arXiv:1706.02413.
Russell, C., Kohli, P., Torr, P. H., et al. (2009). Associa-
tive hierarchical crfs for object class image segmen-
tation. In Computer Vision, 2009 IEEE 12th Interna-
tional Conference on, pages 739–746. IEEE.
Song, S., Yu, F., Zeng, A., Chang, A. X., Savva, M., and
Funkhouser, T. (2017). Semantic scene completion
from a single depth image. Proceedings of 30th IEEE
Conference on Computer Vision and Pattern Recogni-
tion.
Straub, J., Whelan, T., Ma, L., Chen, Y., Wijmans, E.,
Green, S., Engel, J. J., Mur-Artal, R., Ren, C., Verma,
S., Clarkson, A., Yan, M., Budge, B., Yan, Y., Pan,
X., Yon, J., Zou, Y., Leon, K., Carter, N., Briales, J.,
Gillingham, T., Mueggler, E., Pesqueira, L., Savva,
M., Batra, D., Strasdat, H. M., Nardi, R. D., Goesele,
M., Lovegrove, S., and Newcombe, R. (2019). The
Replica dataset: A digital replica of indoor spaces.
arXiv preprint arXiv:1906.05797.
Sun, C.-Y., Zou, Q.-F., Tong, X., and Liu, Y. (2019). Learn-
ing adaptive hierarchical cuboid abstractions of 3d
shape collections. ACM Transactions on Graphics
(TOG), 38(6):1–13.
Uy, M. A., Pham, Q.-H., Hua, B.-S., Nguyen, T., and
Yeung, S.-K. (2019). Revisiting point cloud clas-
sification: A new benchmark dataset and classifica-
tion model on real-world data. In Proceedings of the
IEEE/CVF International Conference on Computer Vi-
sion, pages 1588–1597.
Wang, P.-S., Liu, Y., Guo, Y.-X., Sun, C.-Y., and Tong,
X. (2017). O-cnn: Octree-based convolutional neu-
ral networks for 3d shape analysis. ACM Transactions
on Graphics (TOG), 36(4):1–11.
Wang, W., Yu, R., Huang, Q., and Neumann, U. (2018).
Sgpn: Similarity group proposal network for 3d point
cloud instance segmentation. In Proceedings of the
IEEE Conference on Computer Vision and Pattern
Recognition, pages 2569–2578.
Wang, X., Liu, S., Shen, X., Shen, C., and Jia, J. (2019a).
Associatively segmenting instances and semantics in
point clouds. In Proceedings of the IEEE Conference
on Computer Vision and Pattern Recognition, pages
4096–4105.
Wang, Y., Sun, Y., Liu, Z., Sarma, S. E., Bronstein, M. M.,
and Solomon, J. M. (2019b). Dynamic graph cnn
for learning on point clouds. ACM Transactions on
Graphics (TOG), 38(5):1–12.
Wu, R., Zhuang, Y., Xu, K., Zhang, H., and Chen, B.
(2019a). Pq-net: A generative part seq2seq network
for 3d shapes. arXiv preprint arXiv:1911.10949.
Wu, Z., Wang, X., Lin, D., Lischinski, D., Cohen-Or, D.,
and Huang, H. (2019b). Sagnet: Structure-aware gen-
erative network for 3d-shape modeling. ACM Trans-
actions on Graphics (TOG), 38(4):1–14.
Xu, D., Zhu, Y., Choy, C. B., and Fei-Fei, L. (2017). Scene
graph generation by iterative message passing. In
The IEEE Conference on Computer Vision and Pat-
tern Recognition (CVPR).
Yang, B., Wang, J., Clark, R., Hu, Q., Wang, S., Markham,
A., and Trigoni, N. (2019). Learning object bounding
boxes for 3d instance segmentation on point clouds. In
Advances in Neural Information Processing Systems,
pages 6737–6746.
Yi, L., Guibas, L., Hertzmann, A., Kim, V. G., Su, H., and
Yumer, E. (2017). Learning hierarchical shape seg-
mentation and labeling from online repositories. arXiv
preprint arXiv:1705.01661.
Yi, L., Kim, V. G., Ceylan, D., Shen, I.-C., Yan, M., Su, H.,
Lu, C., Huang, Q., Sheffer, A., and Guibas, L. (2016).
A scalable active framework for region annotation in
3d shape collections. ACM Transactions on Graphics
(TOG), 35(6):1–12.
Yi, L., Zhao, W., Wang, H., Sung, M., and Guibas, L. J.
(2019). Gspn: Generative shape proposal network for
3d instance segmentation in point cloud. In Proceed-
ings of the IEEE Conference on Computer Vision and
Pattern Recognition, pages 3947–3956.
Yildirim, I., Kulkarni, T. D., Freiwald, W. A., and Tenen-
baum, J. B. (2015). Efficient and robust analysis-by-
synthesis in vision: A computational framework, be-
havioral tests, and modeling neuronal representations.
In Annual conference of the cognitive science society,
volume 1.
Yuille, A. and Kersten, D. (2006). Vision as bayesian in-
ference: analysis by synthesis? Trends in cognitive
sciences, 10(7):301–308.
Zacharov, I., Arslanov, R., Gunin, M., Stefonishin,
D., Bykov, A., Pavlov, S., Panarin, O., Mal-
iutin, A., Rykovanov, S., and Fedorov, M. (2019).
“zhores”—petaflops supercomputer for data-driven
modeling, machine learning and artificial intelligence
installed in skolkovo institute of science and technol-
ogy. Open Engineering, 9(1):512–520.
Zhang, B. and Wonka, P. (2019). Point cloud instance
segmentation using probabilistic embeddings. arXiv
preprint arXiv:1912.00145.
Zhang, Z. (2012). Microsoft kinect sensor and its effect.
IEEE multimedia, 19(2):4–10.
Zhu, C., Xu, K., Chaudhuri, S., Yi, L., Guibas, L., and
Zhang, H. (2019). Cosegnet: Deep co-segmentation
of 3d shapes with group consistency loss. arXiv
preprint arXiv:1903.10297.
Zhu, S.-C. and Mumford, D. (2006). A stochastic gram-
mar of images. Foundations and Trends® in Com-
puter Graphics and Vision, 2(4):259–362.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
722
