
Area Lights Voxelization for Light Propagation Volumes
Cristian Lambru
a
, Florica Moldoveanu
b
, Anca Morar
c
and Victor Asavei
d
Faculty of Automatic Control and Computers, University POLITEHNICA of Bucharest, 060042, Bucharest, Romania
Keywords:
Computer Graphics, Area Lights, Voxelization, Light Propagation Volumes.
Abstract:
Simulation of the area light sources direct illumination is a topic of interest in the field of Computer Graphics.
In the real world, all light sources have a surface from which light is emitted. Thus, for a physically correct
simulation of the light transport in graphical applications, area light sources are required. In addition, there
are complex lighting effects that can only be simulated with such light sources. In this paper, we present an
improvement of the direct lighting simulation for area light sources within the real-time global illumination
technique called light propagation volumes. Our method is based on a voxelization of the area light source
geometry in a voxel volume of the same resolution as the light propagation volume used in the global illumi-
nation technique. With a sample for every voxel that intersects a triangle, for every triangle of the mesh, we
obtain an optimal distribution of the samples needed to approximate the direct illumination of the area light
source for the light propagation volumes technique.
1 INTRODUCTION
An area light source is defined by a geometry on the
surface of which radiance is emitted. Such a light
source has applicability in Computer Graphics be-
cause it can reproduce effects such as the light of
a TV display. The light emitted by such a source
can reach the observer directly, but it can also reach
other surfaces in the scene and by reflection, only later
reach the observer. In particular, the simulation of the
first bounce of light is a topic of interest in Computer
Graphics. Analogous as for analytic light sources,
such as directional or point lights, we consider the
simulation of this first bounce of light to be direct il-
lumination.
By comparison, the analytic light sources are a
useful mathematical concept in practice. These light
sources have no surface or volume and are usually
represented by a position in space, around which they
scatter radiance according to a chosen behavior. Their
simulation is easily performed analytically and offers
fast solutions for real-time applications. They can
also produce plausible visual results. However, this
type of light does not exist in real world. All the
lights in nature have a surface and in addition, effects
a
https://orcid.org/0000-0002-3168-9969
b
https://orcid.org/0000-0002-8357-5840
c
https://orcid.org/0000-0002-4773-6862
d
https://orcid.org/0000-0002-4776-2542
such as the one mentioned above cannot be simulated
with analytic lights. Therefore, the simulation of di-
rect lighting of area light sources has been researched
for a long time.
In this paper, we present a method to improve
the simulation of area light sources direct illumina-
tion within the real-time global illumination tech-
nique called light propagation volumes (Kaplanyan
and Dachsbacher, 2010). Its authors specified that this
technique can be adapted to simulate the direct illumi-
nation of area light sources by sampling the surface of
these sources to obtain an initial set of points that are
used as input for the technique. More details about
the light propagation volumes technique are provided
in Section 2.2. Our method uses a voxelization of the
area light source mesh representation into a voxel vol-
ume of the same resolution as the 3D grid used in the
global illumination technique. Taking a sample for
each voxel that intersects a triangle, for every trian-
gle of the mesh, creates an optimal distribution for
the samples needed to approximate the direct illumi-
nation of area light source for the light propagation
volumes technique.
The paper is structured as follows. Section 2
presents the related works and the necessary back-
ground for our method, followed in Section 3 by a
detailed description of it. Section 4 presents the quan-
titative and qualitative results obtained by our method.
Section 5 presents some conclusions about our work.
212
Lambru, C., Moldoveanu, F., Morar, A. and Asavei, V.
Area Lights Voxelization for Light Propagation Volumes.
DOI: 10.5220/0010841600003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 1: GRAPP, pages
212-219
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

2 RELATED WORK
2.1 Area Lights
The real-time techniques approached by the game in-
dustry are based on analytical solutions that provide
plausible results. One of them uses a set of represen-
tative points to approximate the surface of the light
source. These points are numerically integrated to
obtain an approximation of the lighting of the entire
surface. The approach requires closed-form formu-
las specific to the area light source shape. Several
solutions have been proposed for different shapes,
such as lines (Picott, 1992), spheres (Snyder, 1996)
and rectangles (which also applies to disks) (Drobot,
2014). For generic planar polygonal light sources,
Arvo (Arvo, 1995) proposed a solution that was later
improved by Lecocq et al. (Lecocq et al., 2017) to
provide real-time performance. Recently, Heitz et
al. (Heitz et al., 2016) introduced a new class of tech-
niques that use linearly transformed spherical distri-
butions to offer great flexibility over the shape of the
polygon that describes the light source.
The direct illumination of an area light source be-
haves similarly to the indirect illumination of the sur-
face when the light comes from another light source.
So that, in general, real-time global illumination tech-
niques can easily simulate direct illumination of area
light sources, as shown by Lambru et al. (Lambru
et al., 2021). Nichols et al. (Nichols et al., 2010)
proposed such an approach that uses the informa-
tion on the screen. However, this approach is limited
by the information on the screen and have problems
with temporal coherence as the camera moves. The
light propagation volumes technique (Kaplanyan and
Dachsbacher, 2010), which our method improves, of-
fers good visual results. This technique is presented
in more detail in the next subsection. The techniques
that use the scene geometry in the form of voxel repre-
sentation can also simulate the direct illumination of
area light sources, as shown by Villegas and Ram
´
ırez
(Villegas and Ram
´
ırez, 2016).
2.2 Light Propagation Volumes
This technique was proposed by Kaplanyan and
Dachsbacher (Kaplanyan and Dachsbacher, 2010) to
produce real-time indirect illumination and uses a 3D
grid, known as light propagation volume (LPV). Ev-
ery LPV cell stores the radiance that leaves the center
of the cell in all directions around it. To store such
a distribution around a point, spherical harmonics are
used. In order to compute the indirect illumination
for every pixel on the screen, obtained by rendering
the scene from the position of the observer, the in-
formation from the LPV cell whose center is closest
to the 3D space position of the pixel is queried. In
this way, the radiance that reaches the pixel from the
center of the LPV cell is obtained. However, for this
purpose it is required to compute in each cell the radi-
ance that reaches its center from all areas of the scene.
This process is done in two steps. First, an initial radi-
ance is introduced in the cells whose center is closest
to the positions where the light is reflected by the sur-
faces of the scene. In the second step, this radiance
information is propagated to all LPV cells. The sec-
ond step propagates the radiance information through
an iterative process, that at every iteration, propagates
the radiance information on each cell to all its neigh-
bors. This can also be a gathering process, in which
at each iteration, each cell accumulates the radiance
information from its neighbors.
Kaplanyan and Dachsbacher (Kaplanyan and
Dachsbacher, 2010) specified that the initial radiance
can be obtained from any source. In order to simulate
the area light sources direct illumination, they pro-
posed sampling the area lights surface in virtual point
lights (VPLs), which would be subsequently intro-
duced into the LPV. Di Koa et al. (Di Koa et al., 2017)
improved this approach and used a Poisson sampling
to acquire the VPLs. Di Koa and Johan (Di Koa and
Johan, 2016) proposed a technique to obtain a sec-
ond bounce of light for area light sources, by using
the LPV for direct illumination and the information
on the screen for indirect illumination. However, this
approach has problems due to the fact that it is lim-
ited to the information available on the screen for the
second bounce of light.
2.3 Mesh Voxelization
A voxel represents a unit of space of cubic shape and
is oriented parallel to the coordinates axes. The rep-
resentation of spatial information as a grid of voxels
has applicability in generic volumetric rendering.
The conversion of polygonal meshes into a voxel
volume is known as voxelization. Several real-time
techniques (Fang and Chen, 2000; Dong et al., 2004)
have taken advantage of the hardware acceleration
of GPUs. Eisemann and D
´
ecoret (Eisemann and
D
´
ecoret, 2008) proposed an approach that uses the
GPU rasterizer to voxelize the mesh representation of
the scene in a single rendering pass, but can only pro-
duce binary information per voxel. Schwarz and Sei-
del (Schwarz and Seidel, 2010) also proposed a single
pass solution, but without limitations on the informa-
tion stored in a voxel.
Area Lights Voxelization for Light Propagation Volumes
213

3 PROPOSED METHOD
Our method is an improvement of the light propaga-
tion volumes technique (Kaplanyan and Dachsbacher,
2010). Its authors proposed to simulate the direct illu-
mination of area light sources by sampling the surface
of these sources and creating a VPL for every sam-
ple. These VPLs are subsequently introduced into
the LPV as initial radiance. However, they failed to
provide a sampling strategy and a distribution of the
samples. They stated that they simulated area light
sources direct illumination with a dense sampling of
VPLs without providing an analysis and a quantitative
evaluation of this adaptation.
The purpose of this set of samples proposed by the
authors is to approximate the area light source direct
illumination inside the LPV. A sample set that does
not cover every LPV cell that intersects the area light
source surface does not introduce the radiance in all
the cells necessary to approximate the direct illumi-
nation of this source. This scenario is visible in Panel
(a) of Figure 1, where it can be seen that the visual
result is not plausible because the scene is dimly lit
compared to the surface of the area light source. By
contrast, in Panels (b) and (c) of Figure 1, the visual
results obtained with two sample sets that cover all
intersecting LPV cells can be observed.
This initially injected illumination is later propa-
gated throughout the LPV so that it can be quickly
accessed at any point in the scene. The radiance of
a VPL is injected into the LPV cell whose center is
closest to the VPL position. Thus, the VPL position
is not stored inside the LPV and it is considered that
(a)
(b)
(c)
x2
x2
Figure 1: Three panels that show different scenarios of sam-
pling the triangles of the area light source mesh. The yellow
rectangle represents a planar area light source composed of
two triangles. The top figure in each panel shows the dis-
tribution of samples that approximate the area light source
direct illumination. The samples are marked by red dots,
inside the triangles of the mesh and the LPV grid. Panel
(a): an under-sampling scenario is presented. Panel (b): an
over-sampling scenario. Panel (c): The VPL distribution
obtained by our voxelization sampling method. The large
red dots mark two overlapping samples.
the radiance emission is made from the center of this
LPV cell. In the situation where the intersection area
between the area light source surface and a LPV cell
has homogeneous information on its entire surface,
such as the same radiant flux and emission direction,
a single VPL is sufficient to approximate the direct il-
lumination of the area light source in the intersected
LPV cell. Such a scenario is visible in Panel (c) of
Figure 1, where it can be observed that the same vi-
sual result is obtained as in Panel (b) of Figure 1,
for which a larger sample set was used. All VPLs
in the same intersection area with homogeneous in-
formation on its surface contain the same information
except for the position, which is not stored inside the
LPV cell. For a mesh representation of the area light
source, this homogeneity on the surface of the inter-
section area is obtained when the homogeneity is at
the level of an entire triangle. We continue this sec-
tion by presenting this simplified scenario with homo-
geneous information and subsequently we present our
proposal for the situation in which the information is
not homogeneous at the level of an entire triangle. For
both scenarios, our proposal uses only one sample per
intersection area.
The use of a single sample per intersection area
offers multiple performance advantages. It should be
mentioned that the sample set cannot be processed en-
tirely offline and the radiance of the VPLs in it must
be injected into the LPV at each frame based on the
transformations of the area light source and the posi-
tion of the LPV. Thus, a large set of VPLs has a high
cost because it requires processing at each frame. For
this reason, dense sampling is not always the optimal
solution for the simulation of area light source direct
illumination.
3.1 Sampling by Voxelization
We further refer to the term intersection area for the
entire portion of a triangle that is found inside a LPV
cell. To obtain all the intersection areas of an area
light source mesh, we use a process similar to the
voxelization approach proposed by Schwarz and Sei-
del (Schwarz and Seidel, 2010). This technique uses
the GPU rasterizer to voxelize the geometry in a sin-
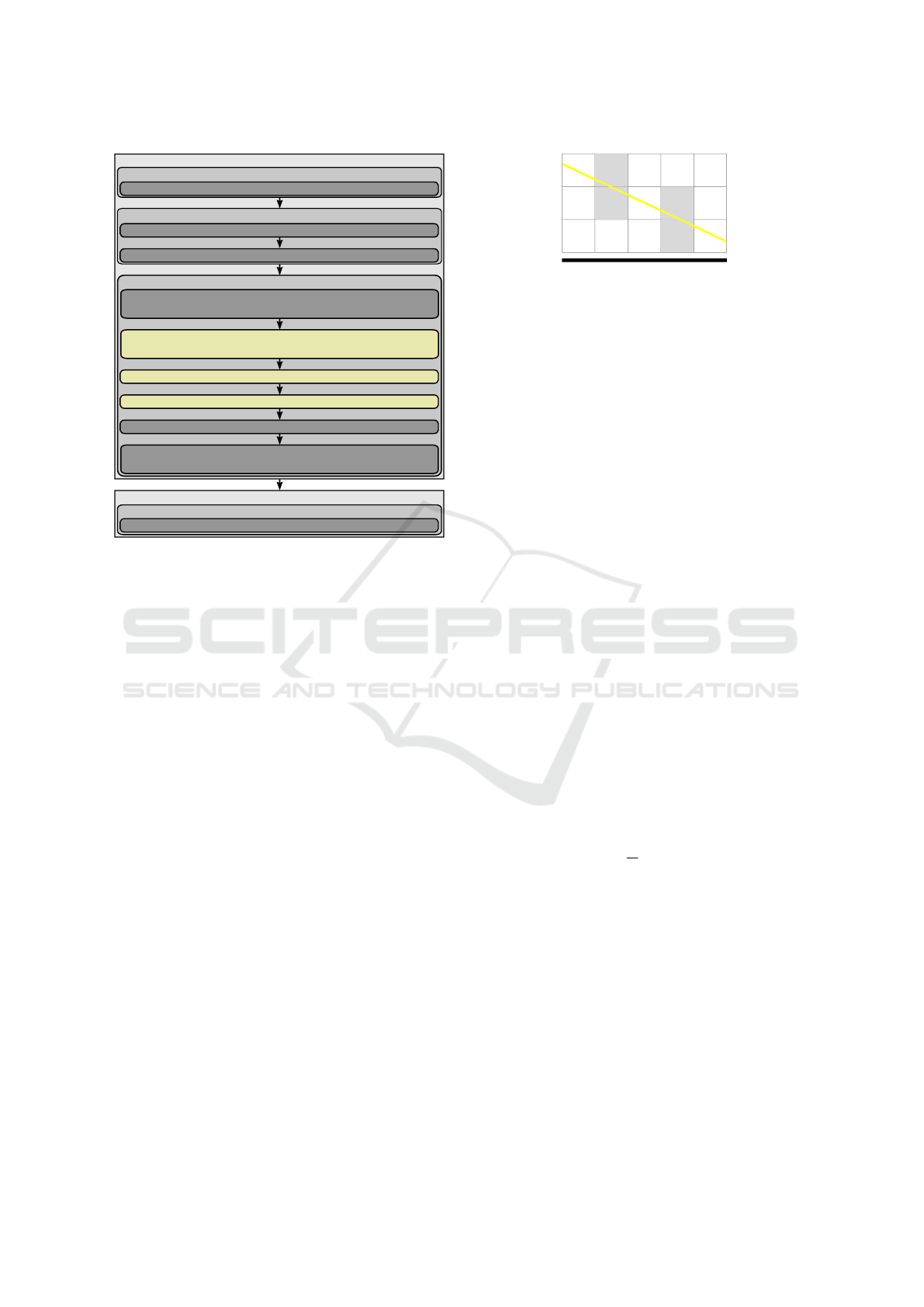
gle rendering pass. The pipeline of our approach is
shown in Figure 2 and is described below.
The voxelization process starts by rendering the
area light source mesh in a viewport having the reso-
lution of the LPV faces. In the geometry shader, the
vertices of the triangle are projected on the plane of
one of the LPV faces. In the fragment shader, the
clipspace coordinates (x, y, z) are normalized to the
resolution of the LPV (side
3
), obtaining the position
GRAPP 2022 - 17th International Conference on Computer Graphics Theory and Applications
214
Generate clamped cosine lobes distribution
Vertex Shader
Obtain the intersected LPV cells along z-axis.
Discard fragment when there is none.
Fragment Shader
Compute intersection AABB between
LPV cell face and initial triangle projection
Sample texture mipmap level
Inject sample inside intersected LPV cells
Insert the number of samples inside
intersected LPV cells counter
Project triangle vertices
Transform to world space
Geometry Shader
Expand triangle
Triangle Voxelization
Compute Shader
Weight spherical harmonic coefficients
Spherical Harmonics Coefficients Weighting
Figure 2: The pipeline of our sampling method that uses
the voxelization of the area light source mesh. Operations
marked in yellow represent the necessary additional steps
when the information is not homogeneous on the entire sur-
face of the mesh triangles.
of the cell (A
x
, A
y
, A
z
) in the LPV grid.
A triangle can intersect several LPV cells on the
z-axis, cells for which no fragments are produced by
the voxelization approach we use. Thus, all LPV
cells that have the same coordinates (A
x
, A
y
) must be
checked whether they intersect with the triangle. For
this process, we used the test proposed by Akenine-
M
¨
oller (Akenine-M
¨
oller, 2001). To optimize this
approach, we project the triangle on the LPV face
for which the triangle projection has the largest sur-
face. This approach ensures that a maximum of 2
cells intersect the triangle projection on the z-axis.
To obtain the 2 cells, we check only the following
3 cells: {(A
0
x
, A
0
y
, A
0
z−1
), (A
0
x
, A
0
y
, A
0
z
), (A
0
x
, A
0
y
, A
0
z+1
)},
where (A
0
x
, A
0
y
) represents the coordinates on the face
chosen for the projection of the triangle and A
0
z
is the
coordinate in depth along the axis perpendicular to
this face. Such a scenario is presented in Figure 3.
The GPU rasterizer does not generate the frag-
ments whose centers are outside the rasterized trian-
gle, even when the triangle partially intersects them.
Thus, a VPL for the intersection area cannot be gener-
ated when the fragment shader process has not started.
To generate these fragments, we extend the rasterized
triangle outwards with the approach proposed by Has-
selgren et al. (Hasselgren et al., 2005). This approach
sends to rasterization a larger triangle which cov-
A'
z-1
A'
z+1
A'
z
Figure 3: Section perpendicular to the plane of the LPV
face on which the triangle is projected. The section of the
triangle is marked in yellow. The section of the plane on
which the triangle is projected is marked in black. The gray
cell pairs are intersected by the section of the triangle along
the axis perpendicular to the face on which it is projected.
ers the centers of all partially intersected fragments.
However, the larger triangle can also cover the cen-
ter of other fragments that are completely outside the
triangle. In order not to introduce samples into LPV
cells that should not receive radiance, we compute the
cells of the LPV, along the z-axis, which intersect the
initial triangle, before the expansion process.
For every intersection area, a VPL is created with
the position of the LPV cell center in which the area
is located and with the direction of radiance emission
and the radiant flux of the triangle. This situation is
valid when the information is homogeneous over the
entire surface of the triangle. Because the intersection
areas are computed for every triangle, this approach
covers the situation in which the triangles have differ-
ent information from others.
The radiance of each VPL is injected into the
spherical harmonic inside the LPV cell similarly to
that of the VPLs for indirect illumination in the light
propagation volumes technique. We use a clamped
cosine lobe in terms of zonal spherical harmonics
along the negative z-axis (Ramamoorthi and Hanra-
han, 2001) rotated in the direction of radiance emis-
sion (Sloan, 2008). To obtain the radiance distribution
for all VPLs in a LPV cell, we use:
D
0
=
1
N
N
∑
i=0
D
i
·C
i
(1)
where D
0
represents the spherical harmonic coeffi-
cients that approximate the radiance distribution in
the LPV cell, N is the number of VPLs inside the cell
and D
i
represents the coefficients of the clamped co-
sine lobe in terms of zonal spherical harmonics that
approximate the radiance distribution of the i-th VPL.
We compute the coefficients D
0
of 3 spherical har-
monics inside each cell, one for every color chan-
nel {R, G, B}. Thus, C
i
represents the intensity of the
color channel corresponding to the coefficients D
0
for
the i-th VPL. We use 2-band spherical harmonics, so
a total of 4 coefficients are used.
We count the number of VPLs in each LPV cell
Area Lights Voxelization for Light Propagation Volumes
215

in parallel with the computation of the spherical har-
monic coefficients corresponding to the cell. During
the voxelization process, we store this VPL counter
for each cell and we update the coefficients without
weighting. After this process, we weight all the coef-
ficients in a compute shader.
The GPU can start several fragment shader pro-
cesses in parallel, so that several VPLs can be injected
in a LPV cell at the same time. To avoid concur-
rency problems, we use atomic operations to update
the spherical harmonic coefficients and the counter in-
side the LPV cells.
3.2 Radiance Distribution
To store a specific radiance distribution on the sur-
face of a mesh triangle, we use an emission direction
for every triangle vertex. The emission direction at a
point inside the triangle is computed through interpo-
lation.
In this situation, where the emission direction is
not the same on the entire surface of the intersection
area, it is necessary to create a spherical harmonic
that approximates this radiance distribution. Sev-
eral methods (Wang and Ramamoorthi, 2018; Bel-
cour et al., 2018) have been proposed to compute
such a spherical harmonic for any number of bands.
However, due to the fact that we use 2-band spherical
harmonics, such an approach would be unnecessary.
Our approach to approximate the radiance distribution
uses a set of clamped cosine lobes to approximates all
emission directions on the intersection area surface.
To obtain the distribution of the clamped cosine
lobes, we compute the projection of the intersection
area on the LPV face on which the triangle is pro-
jected. For simplicity, we compute only the axis-
aligned bounding box (AABB) of the intersection
area between the face of the LPV cell and the pro-
jection of the initial triangle, before expansion. For
this process, we compute the AABB of the polygon
formed by the projected vertices of the triangle that
are inside the LPV cell face, the corners of the LPV
cell face that are inside the triangle projection and the
intersection points between the edges of the LPV cell
face and the edges of the triangle. These points can
be seen in Figure 4, marked with red dots.
After obtaining this AABB of the intersection area
projection, the emission direction in each corner of
the AABB is computed. The clamped cosine lobes
are distributed between the emission directions from
the corners, vertically and horizontally at angular dis-
tances of the same degree as that of the cosine lobe.
Each generated cosine lobe is injected into the LPV
cell with a weight of 1. The only observation is that
Figure 4: Several examples of AABBs, marked with dotted
line, computed for the intersection of the triangle projec-
tion, marked in yellow, with a LPV cell face. An AABB is
obtained for the polygon determined by the points marked
with red dots.
this distribution is created locally and only the final
approximation with the weight as the number of lobes
required for the approximation is injected inside all
LPV cells intersected along the z-axis.
To obtain the emission direction in a corner of the
AABB, we compute the barycentric coordinates of
the respective corner inside the initial triangle. With
these barycentric coordinates, the direction from the
corner of the AABB is computed based on the direc-
tion information from the vertices of the triangle.
This approach can produce minor visual errors be-
cause it generates a single radiance distribution for the
AABB of the intersection area projection. This inter-
section area, as presented in Section 3.1, can cover
two LPV cells. For a correct computation of the radi-
ance distribution, the intersection area for every inter-
sected LPV cell must be processed.
3.3 Textured Area Lights
To store the radiant flux information on the surface
of a triangle mesh, we use the texture mapping tech-
nique. We use texture coordinates at the vertices of
the triangle and interpolate them to obtain the texture
coordinate at any point inside the triangle. This coor-
dinate is used to sample the radiant flux map.
To approximate the entire radiant flux of the in-
tersection area, we use, similarly as in Section 3.2,
the AABB of this area projection on the LPV face on
which the triangle is projected. Based on the barycen-
tric coordinates of the AABB center, the texture co-
ordinate from this position is computed. To quickly
compute the entire radiant flux information of the in-
tersection area, the mipmaping technique is applied
to the radiant flux map. We compute the mipmap
level required to approximate the radiant flux similar
to the specifications of the OpenGL standard (Segal
and Akeley, 1999), based on the texture coordinates
in the corners of the AABB.
This approach, similar to Section 3.2, can produce
minor visual errors due to the fact that a single radiant
flux sample is computed for all LPV cells intersected
along the z-axis. In addition, due to the approxima-
tion made by the mipmapping technique, radiant flux
GRAPP 2022 - 17th International Conference on Computer Graphics Theory and Applications
216
information can be introduced from areas outside the
intersection area.
4 RESULTS
4.1 Dense Sampling
Because the authors of the light propagation volumes
technique did not provide a strategy to sample the sur-
face of the area light sources, we had to design our
own strategy to obtain a dense sampling. We compare
the results obtained by this strategy with our optimal
method that uses the voxelization process of the area
light source mesh.
To obtain a dense sampling, we decided to sam-
ple each triangle of the area light source mesh with a
number of samples evenly distributed inside the trian-
gle. The distribution of the samples inside a triangle
was made similarly to Turk (Turk, 1990):
P = (1−
√
r
1
)·A+
√
r
1
·(1 −r
2
)·B+
√
r
1
·r
2
·C (2)
where P is the sample position, (A, B, C) are the ver-
tices positions of the triangle and {r
1
, r
2
} are two ran-
dom numbers in the interval [0, 1].
4.2 Evaluation
We implemented both the dense sampling strategy de-
scribed in Section 4.1 and our method described in
Section 3 in the C++ programming language with
OpenGL 4.6 graphics API. Performance evaluation
was performed on a machine with Nvidia GTX 1660
GPU.
We evaluated 5 different area light source meshes
with a LPV of 32
3
and 64
3
resolutions. For the dense
sampling strategy, we used 3 sets of samples with 1,
100 and 1 000 samples/triangle. The results of the
quantitative evaluation are presented in Table 1 and
the visual results, only for 64
3
LPV resolution, are
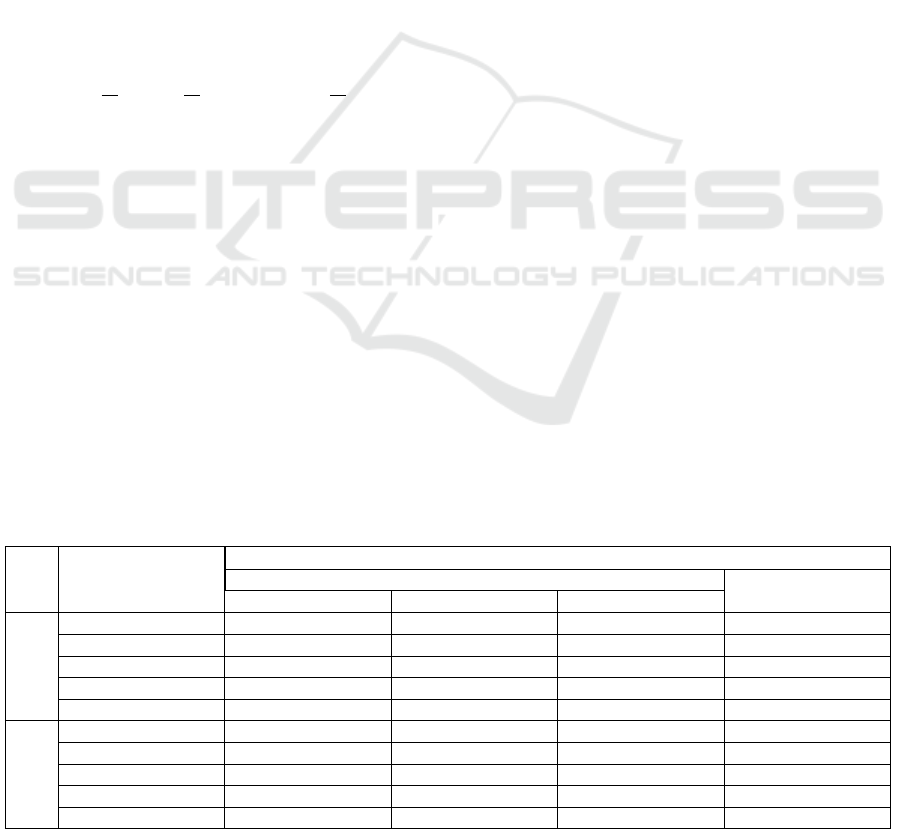
presented in Figures 5 and 6.
We also made a quantitative comparison between
the visual results from Figures 5 and 6. We computed
the mean squared error (MSE) between the pixels of
each image obtained with a dense sampling and the
ones of the image obtained with our method for every
area light source mesh. This MSE is found under each
image obtained with the dense sampling in Figures 5
and 6.
It is visible in Table 1 than a LPV resolution of
64
3
has better performance that a 32
3
resolution for
almost all test data. This is because atomic operations
were used to inject the radiance of each sample into
the LPV, as presented in Section 3.1. Thus, for a high
LPV resolution, few samples are introduced into the
same cell. From our tests, this operation is the most
expensive for the entire sampling process, far beyond
the actual samples generation.
The performance of the strategy that obtains a
dense sampling is poor for a large number of trian-
gles, for obvious reasons. The best performance is
obtained for 1 sample/triangle, but as can be seen in
Figure 5, the visual results are not always the best and
can produce a dimly lit scene. The visual results be-
come plausible and approach the optimal result when
a large number of samples is used. Our method ob-
tains this result for area light source meshes that have
homogeneous information on the surface of all trian-
gles. It detects the LPV cells intersected by each trian-
gle and produces a single sample for every one. The
use of a dense sampling does not always guarantee
that a sample is produced for an intersection area.
The reasons why our method obtains optimal vi-
sual results are explained in Section 3, but a practi-
Table 1: Performance evaluation for both the strategy that obtains a dense sampling and our method that uses the voxelization
of the area light source mesh. The number of triangles for every evaluated mesh is as follows: Quad - 2 triangles, Square
Pyramid - 6 triangles, Tube - 12 triangles, Sphere - 720 triangles and Stanford Lucy - 33 446 triangles.
LPV
res.
Area light
source mesh
Sampling strategy
Dense sampling
Our method
1 smp/tri 100 smp/tri 1 000 smp/tri
32
3
Quad 0.007 ms 0.007 ms 0.015 ms 0.024 ms
Square Pyramid 0.007 ms 0.009 ms 0.034 ms 0.024 ms
Tube 0.007 ms 0.012 ms 0.053 ms 0.025 ms
Sphere 0.009 ms 0.235 ms 2.475 ms 0.031 ms
Stanford Lucy 0.132 ms 9.850 ms 98.500 ms 0.307 ms
64
3
Quad 0.007 ms 0.007 ms 0.015 ms 0.020 ms
Square Pyramid 0.007 ms 0.009 ms 0.024 ms 0.020 ms
Tube 0.007 ms 0.016 ms 0.047 ms 0.020 ms
Sphere 0.008 ms 0.140 ms 1.581 ms 0.032 ms
Stanford Lucy 0.123 ms 9.250 ms 91.760 ms 0.304 ms
Area Lights Voxelization for Light Propagation Volumes
217
1 sample
per triangle
Quad
100 samples
per triangle
1 000 samples
per triangle
Our method
Dense sampling
(a)
0.036959 0.000066
0.000001
Square Pyramid
(b)
0.035019 0.000239
0.000046
Tube
(c)
0.018754 0.000398
0.000006
Sphere
(d)
0.000171 0.000011
0.000002
Stanford Lucy
(e)
0.000024 0.000006
0.000005
Figure 5: The visual results obtained with both the strat-
egy that obtains a dense sampling and our method that uses
the voxelization of the area light source mesh. For the first
method, the visual results obtained for the use of 3 sets
of samples with 1, 100 and 1 000 samples/triangle are pre-
sented. The number below each image represents the MSE
between the pixels of the image and the ones of the image
obtained with our method, visible on the right side of each
panel.
cal example is also provided in Figure 5. This fig-
ure shows the MSE between the pixels of each image
obtained with a dense sampling and those of the im-
age obtained with our method. It can be seen that
the MSE is small when a dense sampling with 100
samples/triangle is used and approaches 0 when the
number of samples/triangle is 1 000. Thus, it can be
observed that our method offers visual results almost
identical to these provided by the use of a dense sam-
pling with a large sample set.
Our method provides optimal visual results in
general at performances superior to a dense sampling.
This can be observed from the quantitative evalua-
tions visible in Table 1 and Figure 5, where in Panel
(b) of Figure 5 the optimal visual result is obtained
for 1 000 samples/triangle in 0.034 ms compared to
our method that obtains an almost identical result in
0.024 ms for a LPV resolution of 32
3
. A similar situ-
ation is in Panel (c), with 1 000 samples/triangle with
a performance 2 times poorer than that of our method,
in Panel (d) with 100 samples/triangle at a perfor-
mance 4.3 times poorer and in Panel (e) with 100
samples/triangle at a performance 30.4 times poorer.
The only area light source mesh for which the use
of a dense sampling has superior performance to our
method is the one in Panel (a) of Figure 5, where for
1 000 samples/triangle, dense sampling obtains the
optimal result at a performance of 0.6 compared to
our method.
For the situation where the information is not ho-
mogeneous on the entire surface of the mesh trian-
gles, our method produces visual results similar to
those obtained by a dense sampling. This is visible
in Panel (a) of Figure 6. Our approach can produce
minor visual errors, as explained in Sections 3.2 and
3.3. However, it can be seen that the MSE between
the pixels of the image obtained with a dense sam-
pling and those of the image produced by our method
is small when the number of samples is large for the
dense sampling. Therefore, the result obtained by our
method is close to the optimal one, obtained with the
dense sampling when a large number of samples is
used.
Our method is an improvement of the light prop-
agation volumes technique. It offers an optimal dis-
tribution of VPLs that approximates the direct illu-
mination of area light sources, but after this step, the
light propagation volumes technique does not support
changes. Therefore, the direct lighting simulation has
the same level of flexibility and quality of the visual
results as this technique allows. Our method can pro-
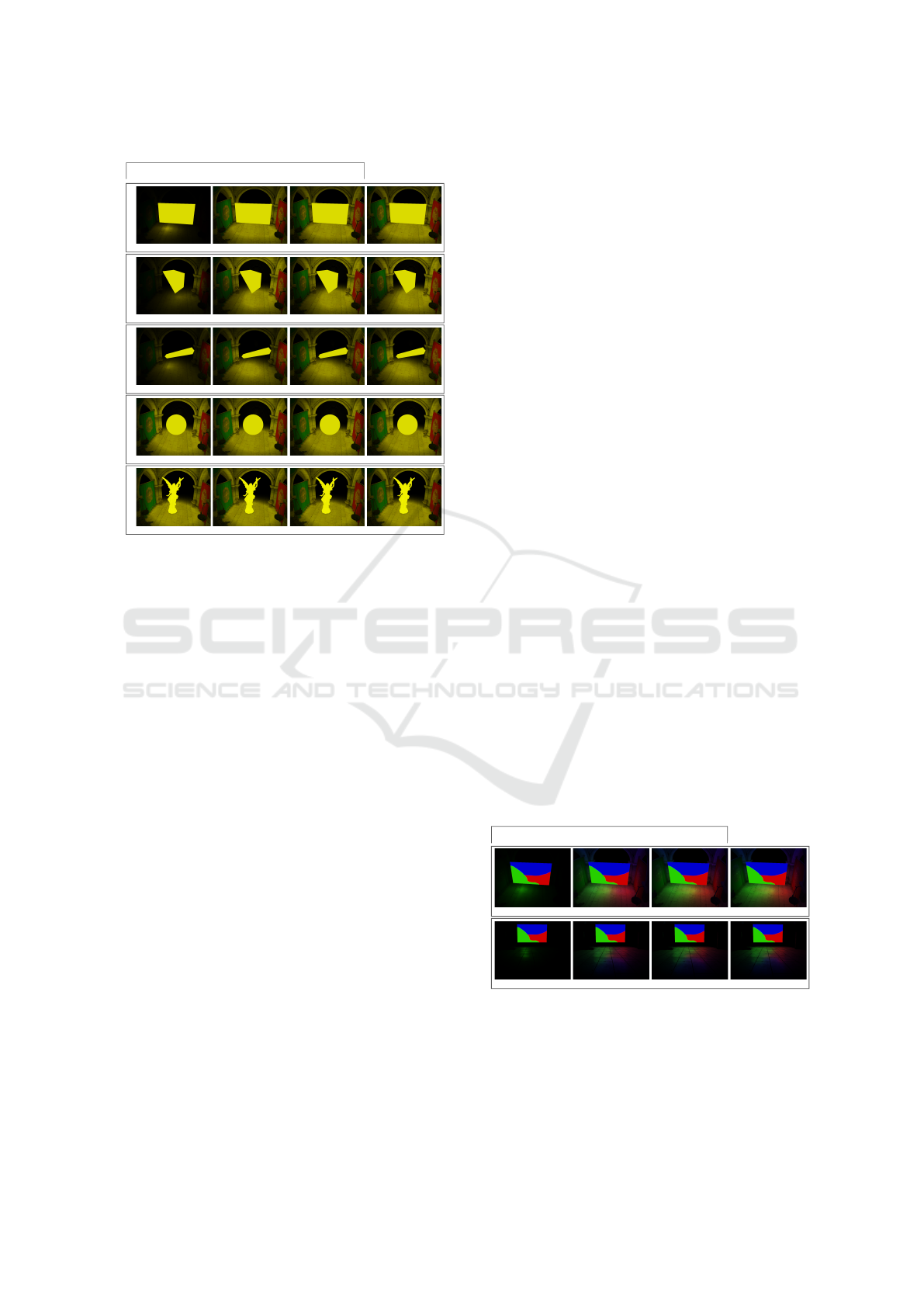
duce, at different quality levels, several lighting ef-
fects. The effect with the highest quality of the vi-
sual results is the direct diffuse illumination, visible in
Panel (a) of Figure 6. The direct specular illumination
is not of good quality due to the rather low resolution
of the LPV and the use of 2-band spherical harmon-
ics, as shown by Lambru et al. (Lambru et al., 2021).
Both limitations are motivated by performance. The
visual results are visible in Panel (b) of Figure 6.
1 sample
per triangle
100 samples
per triangle
1 000 samples
per triangle
Dense sampling
Our method
(a)
0.009839 0.000478
0.000020
(b)
0.002217 0.000120
0.000022
Figure 6: The visual results obtained with both the strat-
egy that obtains a dense sampling and our method that uses
the voxelization of the area light source mesh. The number
below each image represents the MSE between the pixels
of the image and the ones of the image obtained with our
method, visible on the right side of each panel. Panel (a):
only the direct diffuse illumination is presented. Panel (b):
only the direct specular illumination.
GRAPP 2022 - 17th International Conference on Computer Graphics Theory and Applications
218

5 CONCLUSIONS
In this paper, we have presented an improvement of
the light propagation volumes technique for the par-
ticular case of simulating area light sources direct il-
lumination. This technique requires the approxima-
tion of these sources direct illumination in the form
of a set of VPLs, that are later used as input in the
technique. The method proposed by us in this article
provides an optimal distribution of VPLs on the area
light source surface, which offers an optimal approx-
imation for the light propagation volumes technique.
A further improvement can be represented by the
better approximation of inhomogeneous information
on the surface of intersection areas. The explanation
of the visual errors obtained with our approximation
was provided in Sections 3.2 and 3.3, together with a
theoretical solution to obtain a better approximation.
Based on the light propagation volumes tech-
nique, our method offers plausible visual results for
both diffuse and specular direct illumination. How-
ever, there are other illumination effects that could be
produced, such as shadows, volumetric lighting and
the simulation of supplemental light bounces for area
light sources. These illumination effects are impor-
tant for area light sources and their simulation may be
a topic of interest in the future.
REFERENCES
Akenine-M
¨
oller, T. (2001). Fast 3d triangle-box overlap
testing. J. Graph. Tools, 6(1):29–33.
Arvo, J. (1995). Applications of irradiance tensors to the
simulation of non-lambertian phenomena. In Pro-
ceedings of the 22nd Annual Conference on Computer
Graphics and Interactive Techniques, SIGGRAPH
’95, page 335–342, New York, NY, USA. Association
for Computing Machinery.
Belcour, L., Xie, G., Hery, C., Meyer, M., Jarosz, W.,
and Nowrouzezahrai, D. (2018). Integrating clipped
spherical harmonics expansions. ACM Trans. Graph.,
37(2).
Di Koa, M. and Johan, H. (2016). Efficient screenspace ren-
dering for area lights. In Proceedings of the 33rd Com-
puter Graphics International, CGI ’16, page 29–32,
New York, NY, USA. Association for Computing Ma-
chinery.
Di Koa, M., Johan, H., and Sourin, A. (2017). Voxel-based
interactive rendering of translucent materials under
area lights using sparse samples. In 2017 Interna-
tional Conference on Cyberworlds (CW), pages 56–
63.
Dong, Z., Chen, W., Bao, H., Zhang, H., and Peng, Q.
(2004). Real-time voxelization for complex polygo-
nal models. In 12th Pacific Conference on Computer
Graphics and Applications, 2004. PG 2004. Proceed-
ings., pages 43–50.
Drobot, M. (2014). Physically based area lights. In Engel,
W., editor, GPU Pro 5, pages 67–100. CRC Press.
Eisemann, E. and D
´
ecoret, X. (2008). Single-pass gpu solid
voxelization for real-time applications. In Proceed-
ings of Graphics Interface 2008, GI ’08, page 73–80,
CAN. Canadian Information Processing Society.
Fang, S. and Chen, H. (2000). Hardware accelerated vox-
elization. Computers & Graphics, 24(3):433–442.
Hasselgren, J., Akenine-M
¨
oller, T., and Ohlsson, L. (2005).
Conservative Rasterization, pages 677–690. Addison-
Wesley.
Heitz, E., Dupuy, J., Hill, S., and Neubelt, D. (2016).
Real-time polygonal-light shading with linearly trans-
formed cosines. ACM Trans. Graph., 35(4).
Kaplanyan, A. and Dachsbacher, C. (2010). Cascaded light
propagation volumes for real-time indirect illumina-
tion. In Proceedings of the 2010 ACM SIGGRAPH
Symposium on Interactive 3D Graphics and Games,
I3D ’10, page 99–107, New York, NY, USA. Associ-
ation for Computing Machinery.
Lambru, C., Morar, A., Moldoveanu, F., Asavei, V., and
Moldoveanu, A. (2021). Comparative analysis of real-
time global illumination techniques in current game
engines. IEEE Access, 9:125158–125183.
Lecocq, P., Dufay, A., Sourimant, G., and Marvie, J.-E.
(2017). Analytic approximations for real-time area
light shading. IEEE transactions on visualization and
computer graphics, PP.
Nichols, G., Penmatsa, R., and Wyman, C. (2010). In-
teractive, multiresolution image-space rendering for
dynamic area lighting. Computer Graphics Forum,
29(4):1279–1288.
Picott, K. P. (1992). Extensions of the linear and area light-
ing models. IEEE Computer Graphics and Applica-
tions, 12(02):31–38.
Ramamoorthi, R. and Hanrahan, P. (2001). On the relation-
ship between radiance and irradiance: determining the
illumination from images of a convex lambertian ob-
ject. J. Opt. Soc. Am. A, 18(10):2448–2459.
Schwarz, M. and Seidel, H.-P. (2010). Fast parallel surface
and solid voxelization on gpus. ACM Trans. Graph.,
29(6).
Segal, M. and Akeley, K. (1999). The opengl graphics sys-
tem: A specification (version 1.1).
Sloan, P.-P. (2008). Stupid spherical harmonics (sh) tricks.
Game developers conference.
Snyder, J. (1996). Area light sources for real-time graphics.
Technical Report MSR-TR-96-11.
Turk, G. (1990). Generating random points in triangles.
Graphics gems, pages 24–28.
Villegas, J. and Ram
´
ırez, E. (2016). Deferred voxel shading
for real-time global illumination. In 2016 XLII Latin
American Computing Conference (CLEI), pages 1–11.
Wang, J. and Ramamoorthi, R. (2018). Analytic spherical
harmonic coefficients for polygonal area lights. ACM
Trans. Graph., 37(4).
Area Lights Voxelization for Light Propagation Volumes
219
