
Multitask Metamodel for Keypoint Visibility Prediction in Human Pose
Estimation
Romain Guesdon, Carlos Crispim-Junior and Laure Tougne
Univ Lyon, Lyon 2, LIRIS UMR 5205
Lyon, France, F-69676
Keywords:
Neural Networks, Human Pose Estimation, Keypoint Visibility Prediction.
Abstract:
The task of human pose estimation (HPE) aims to predict the coordinates of body keypoints in images. Even
if nowadays, we achieve high performance on HPE, some difficulties remain to be fully overcome. For in-
stance, a strong occlusion can deceive the methods and make them predict false-positive keypoints with high
confidence. This can be problematic in applications that require reliable detection, such as posture analysis in
car-safety applications. Despite this difficulty, actual HPE solutions are designed to always predict coordinates
for each keypoint. To answer this problem, we propose a new metamodel that predicts both keypoints coor-
dinates and their visibility. Visibility is an attribute that indicates if a keypoint is visible, non-visible, or not
labeled. Our model is composed of three modules: the feature extraction, the coordinate estimation, and the
visibility prediction modules. We study in this paper the performance of the visibility predictions and the im-
pact of this task on the coordinate estimation. Baseline results are provided on the COCO dataset. Moreover,
to measure the performance of this method in a more occluded context, we also use the driver dataset DriPE.
Finally, we implement the proposed metamodel on several base models to demonstrate the general aspect of
our metamodel.
1 INTRODUCTION
Human Pose Estimation (HPE) is the task that aims
to locate body keypoints on images. These keypoints
can be body joints (shoulders, elbows, hips, ankles,
etc.) or facial markers (eyes, ears, nose). Additional
keypoints on the face, hands or feet are sometimes
used (Hidalgo et al., 2019; Cao et al., 2019).
One of the difficulties of HPE is handling key-
points occlusion. Even if recent solutions have
been able to reach high performance, state-of-the-art
datasets depict many pictures with few occlusion, es-
pecially in pictures presenting one person (Andriluka
et al., 2014; Lin et al., 2015). In contrast, in some
specific contexts like crowds or narrow spaces, body
parts have a high probability of being occluded or get-
ting out of the field of view.
Strong occlusion can lead the network to predict
with high confidence keypoints that are not anno-
tated, as we can see in Figure 1. Furthermore, the
networks may predict many false-positive keypoints
(Guesdon et al., 2021), which can be problematic in
applications where reliable predictions with signifi-
cant precision are required, e.g., for action recognition
or driver’s posture analysis (Das et al., 2017; Zhao
et al., 2020b). Despite the difficulty caused by oc-
clusion, actual HPE networks are designed to predict
coordinates for each keypoints during inference, even
if the keypoint is outside of the image. Networks usu-
ally predict a confidence score; however, it covers the
confidence of both the presence and the coordinates of
the keypoints. Therefore, this score cannot be used to
properly distinguish keypoints that the network could
consider as absent from the image.
State-of-the-art datasets provide visibility labels,
an attribute that depicts the perceptibility of each key-
point. A labeled keypoint can be visible, or non-
visible when the keypoint is lightly occluded but with
enough information to be located. If the keypoint is
heavily occluded or out of the field of view, it is not
labeled. However, state-of-the-art networks do not
consider these visibility labels. Furthermore, the few
existing methods using visibility only consider binary
visibility, i.e., labeled or non-labeled keypoints (Stoffl
et al., 2021; Kumar et al., 2020).
This paper proposes a novel HPE metamodel
1
that
1
Source code is publicly available on: https://gitlab.liris.
cnrs.fr/aura autobehave/vis-pred
428
Guesdon, R., Crispim-Junior, C. and Tougne, L.
Multitask Metamodel for Keypoint Visibility Prediction in Human Pose Estimation.
DOI: 10.5220/0010831200003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 5: VISAPP, pages
428-436
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

can predict both the visibility and the coordinates of
the keypoints. Our solution can be implemented with
most of the deep-learning HPE methods and allows
these base models to predict keypoint visibility. The
model can predict the three classes of labels, which
provides a finer description of the keypoint visibility.
0.653
0.699
0.848
Figure 1: HPE prediction. Red points represent false pos-
itives, i.e., keypoints that were predicted even if not anno-
tated due to strong occlusion. Confidence scores are pro-
vided in the boxes (maximum score = 1.0).
This paper is organized as follows. We present in
Section 2 the related work on human pose estimation
and visibility prediction. Section 3 presents our meta-
model and its detailed architecture, especially the vis-
ibility module. We describe in Section 4 the details
about the experiments, and present the results in Sec-
tion 5. Finally, we discuss in Section 6 our conclu-
sions and future work.
2 RELATED WORK
This section presents existing work on human pose
estimation and visibility keypoints prediction.
The task of human pose estimation is divided into
two categories. Single-person HPE focuses on the de-
tection in pictures presenting one person, in opposi-
tion to multiperson detection. The first approach to
solve single-person HPE using deep learning was pro-
posed in (Toshev and Szegedy, 2014). This solution is
based on the deep architecture AlexNet (Krizhevsky
et al., 2012), which is used to estimate and refine
the coordinates. An Iterative Error Feedback net-
work was proposed in (Carreira et al., 2016) based
on the convolutional network GoogleNet (Szegedy
et al., 2015). The authors of (Sun et al., 2017) used
ResNet50 (He et al., 2016) to predict a parametrized
bones representation. However, all these methods try
to directly predict the keypoints coordinates from the
images, which affects the robustness of these methods
due to the high non-linearity of this approach. Other
solutions categorized as detection-based methods aim
to predict 2D matrices called heatmaps where each
pixel represents the probability for a joint to be lo-
cated here. The work of (Newell et al., 2016) pro-
posed an hourglass module that can be stacked to pre-
dict and refine features at several scales, which has in-
spired many other works (Chu et al., 2017; Ke et al.,
2018; Tang and Wu, 2019; Tang et al., 2018). Besides
hourglass architectures, other detection-based meth-
ods have been proposed. The architecture in (Chen
et al., 2017) combines a heatmap generator with two
discriminators. Simple Baseline (Xiao et al., 2018),
is an architecture based on the ResNet network (He
et al., 2016) with a deconvolution stage to generate
the final heatmaps. Finally, Unipose (Artacho and
Savakis, 2020) combines atrous and cascade convo-
lutions to produce a multi-scale representation.
In addition to finding the keypoints in the picture,
multiperson HPE brings a new difficulty: to associate
the different persons to the detected keypoints. State-
of-the-art performance is achieved by methods called
top-down approaches that first detect the subjects in
the picture and then locate the keypoints for each per-
son individually. These methods usually combine a
person detector with a single-person HPE architec-
ture (Xiao et al., 2018; Sun et al., 2019; Lin et al.,
2017; Cai et al., 2020; Li et al., 2019). Conversely,
the bottom-up approaches first detect every keypoints
in the image before associating them to form people
instances (Newell et al., 2017; Cao et al., 2017; Nie
et al., 2018). Top-down approaches tend to outper-
form the bottom-up methods while taking advantage
of both state-of-the-art person detectors and HPE ar-
chitectures.
Among top-down methods, the Simple Baseline
(SBl) network (Xiao et al., 2018) presents competi-
tive performance while preserving a small size, which
makes it practical for modifications and tests. In addi-
tion, it can be used for multiperson HPE by combin-
ing it with a person detector.
Recent work on human pose estimation has
mainly focused on improving the prediction of the
keypoints’ coordinates. Therefore, methods which
estimate the visibility of HPE keypoints are scarce.
In (Zhao et al., 2020a), visibility prediction is used
to propose a new evaluation method for multiperson
pose estimation in heavily occluded contexts. Visi-
bility is predicted as an occlusion score and is used
to compute a metric that highlights the performance
of the evaluated networks on occluded points. The
multi-instance HPE network in (Stoffl et al., 2021)
uses transformers to predict keypoint visibility, which
serves as a secondary task for end-to-end training.
Besides, keypoint visibility is predicted in (Kumar
et al., 2017; Kumar et al., 2020) as an annex task for
Multitask Metamodel for Keypoint Visibility Prediction in Human Pose Estimation
429
Feature
Extractor
Coordinate
Estimator
Visibility
Predictor
0
2
1
2
0
2
...
Feature Vector
Base model
(x
1
; y
1
)
(x
2
; y
2
)
(x
3
; y
3
)
(x
4
; y
4
)
(x
5
; y
5
)
(x
6
; y
6
)
...
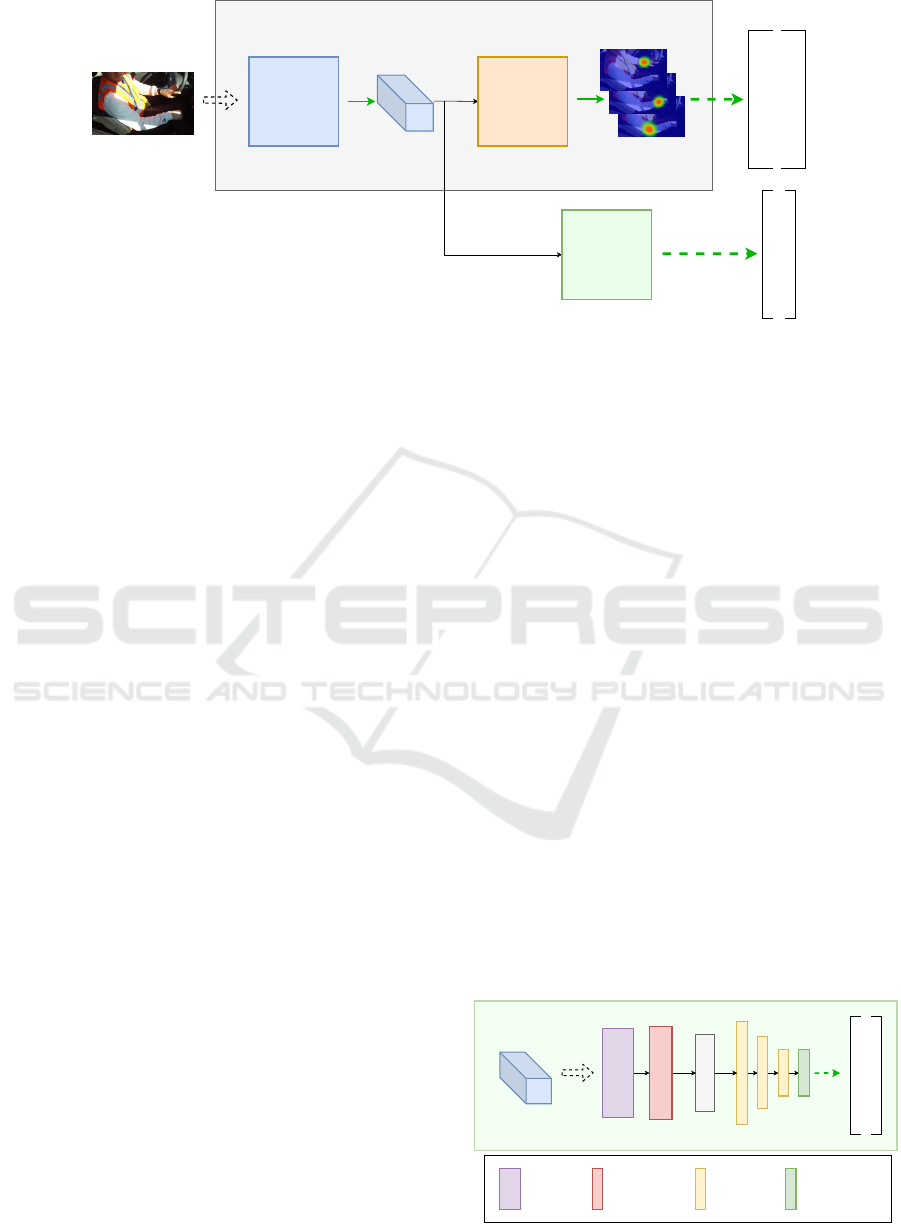
Figure 2: Architecture of our multitask metamodel for keypoint and visibility estimations.
face detection.
However, prior works only predict binary visibil-
ity and do not take advantage of the three visibility
labels provided by the current datasets (visible, non-
visible, non-labeled). Furthermore, the authors pro-
vide few quantified results on the actual performance
of the visibility predictions. Finally, these works pro-
pose a fixed network where the visibility prediction
part is mostly ancillary. In this context, we propose a
metamodel that allows HPE methods to predict both
keypoints coordinates and ternary visibility.
3 PROPOSED METAMODEL
This section presents the architecture of the proposed
HPE visibility metamodel. First, we describe the
overall architecture. Then, we provide a more detailed
description of our visibility module.
3.1 Metamodel
The proposed architecture is split into three parts: the
feature extraction, the coordinate estimation, and the
visibility prediction modules. First, the feature ex-
traction module processes the input image to gen-
erate a feature vector. Examples of feature extrac-
tor are encoder architectures (Newell et al., 2016;
Tang and Wu, 2019; Artacho and Savakis, 2020; Li
et al., 2019), or image recognition backbones such
as ResNet (He et al., 2016) or EfficientNet (Tan and
Le, 2019). Then, the generated vector serves as the
input of the two other modules. Coordinate estima-
tion can be performed by modules such as decoder or
deconvolution stages, usually followed by a convolu-
tion layer which generates the final heatmaps (Newell
et al., 2016; Tang and Wu, 2019; Artacho and Savakis,
2020; Li et al., 2019). Final coordinate predictions
are computed as the local maximum of each heatmap.
The majority of the HPE networks can be split into a
feature extraction and a heatmap generation modules,
which allows most of the architectures to be compati-
ble with our metamodel.
In addition to these two regular modules, we add a
visibility branch (Figure 3). This module takes as in-
put the same feature vector as the coordinate estima-
tion module and outputs the visibility prediction for
each keypoint. The detailed architecture is presented
in the next section.
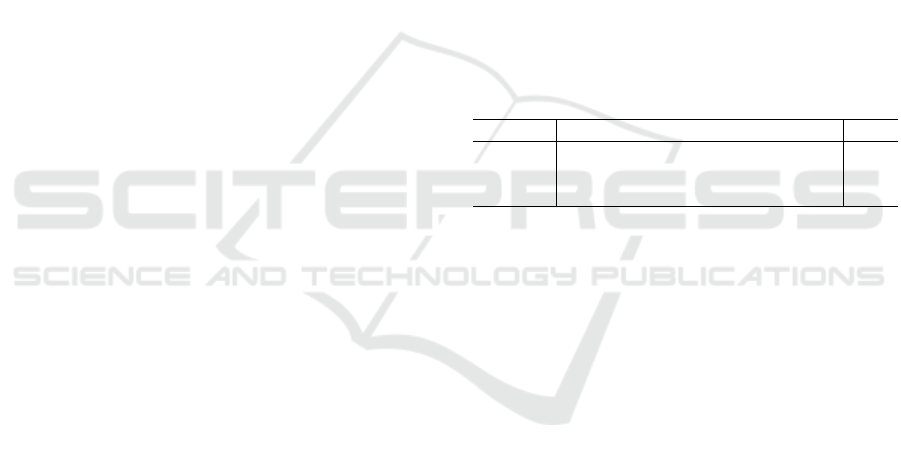
3.2 Visibility Branch
We model the visibility prediction problem as a classi-
fication task. We follow the COCO dataset formalism
and define the visibility using integer labels: 0 when
the keypoint is not labeled, 1 when it is labeled but
not visible, and 2 when it is fully visible. Therefore,
we associate to each keypoint one of the three labels.
The visibility module takes as input the feature vector
computed by the feature extraction module. It is com-
posed of a convolutional module, followed by a fully
connected network (FCN) that generates the final vis-
ibility predictions.
More precisely, a residual block (He et al., 2016)
first processes the input features. This block is com-
Flatten
Residual
module
Conv 1x1 +
MaxPool
Fully-
connected
layer
Final layer +
Softmax
Feature Vector
0
2
1
2
0
2
...
Figure 3: Architecture of our visibility predictor module.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
430

posed of three successive convolution layers with re-
spective kernel sizes of 3x3, 1x1, and 3x3, which
form a bottleneck. An additional skip connection en-
ables the features to be directly propagated to the next
layer. We use this block in our branch since it has
shown good results in feature computation for HPE
((Newell et al., 2016; Tang and Wu, 2019)). Then,
a convolutional layer of kernel size 1x1 with Batch-
Norm and 2x2 max pooling reduces the size and the
number of channels of the features. Finally, features
are flattened and a fully connected network with three
hidden layers (4096, 2048, and 1024 neurons) fol-
lowed by a SoftMax produces the predictions. Since
the COCO dataset provides 17 annotated keypoints
with three possible visibility classes, the output layer
is composed of 51 neurons. The SoftMax function
is applied to groups of three visibility neurons (one
group representing one keypoint).
3.3 Cost Function
The global cost function used to train the network is
defined as follows:
L = (1 − α).L
H
+ α.L
V
(1)
where L
H
is an L2 distance between the predicted
heatmaps and the ground-truth. The ground-truth
heatmaps are generated using Gaussian centered
around the location of the keypoint, with a standard
deviation of 1px.
The function L
V
is the cross-entropy loss applied
to the predictions of the visibility classes. Weighted
cross-entropy is used to compensate for the imbal-
anced distribution of keypoints within the three vis-
ibility classes. Therefore, the weights are computed
as the size of the biggest class divided by the size of
each class. Finally, α is the parameter used to balance
the ratio between the loss functions associated with
the two tasks. This regulates the impact of each tasks
on the training of the feature extractor weights.
4 EXPERIMENTS
In this section, we provide details about how the
experiments have been carried out, such as used
datasets, training, network base models, and evalua-
tion procedure.
4.1 Datasets
We adopted two datasets for the experiments. First,
the COCO dataset (Lin et al., 2015), which is one
of the largest and most used datasets for 2D human
pose estimation in a general context. It is composed of
118k pictures for training and 5k for validation. How-
ever, because of the high number of pictures in this
dataset, the visibility annotations present some incon-
sistencies. Also, the non-visible keypoints are weakly
represented in the COCO dataset, with only 7% of
the total keypoints. Therefore, we evaluated our ar-
chitecture on a second dataset called DriPE (Guesdon
et al., 2021). Figure 4 illustrates some samples. This
dataset possesses 10k manually annotated images of
drivers in consumer vehicles (7.4k images for train-
ing, 1.3k images each for training and testing). The
car environment and the side view-angle of the cam-
eras produce strong occlusion which induces 19% of
non-visible keypoints.
Figure 4: Image samples from DriPE dataset. Faces on the
figure have been blurred for anonymity purpose.
4.2 Basic Training
Most of the results on our architecture are provided
using the Simple Baseline (SBl) network as the base
model (Xiao et al., 2018). This network combines
ResNet50 as feature extractor with a deconvolution
stage (as coordinate estimator) to generate the final
heatmaps. The feature extractor is initialized with
weights pre-trained on ImageNet. The networks are
trained on the COCO dataset for 140 epochs with a
learning rate of 1E-3, decreased by a factor of 10 at
epochs 90 and 120.
Finetuning on DriPE is done during 10 epochs
with a learning rate of 1E-4. We use data augmen-
tation operations (rotation, flipping, etc.) for both
datasets. Following the state of the art, the input
images are cropped around the subjects using the
ground-truth, for both training and evaluation. Train-
ing is performed on a computer with an Nvidia GTX
1080 graphic card, an Intel Core i990k processor, and
32 GB of RAM.
Multitask Metamodel for Keypoint Visibility Prediction in Human Pose Estimation
431
4.3 Multitask Training
We tested in our experiments three strategies for mul-
titask training. As detailed in the previous section,
weights of the feature extractor are initialized on Ima-
geNet and the visibility predictor’s weights are initial-
ized randomly. For the first strategy (S1), we train the
keypoint estimation and the visibility prediction tasks
jointly with a fixed α set to 0.25 (value chosen empiri-
cally). For the second and third strategies (S2 and S3),
we pre-train the feature extraction and coordinate pre-
diction modules on COCO dataset, in the same way
as regular HPE networks are trained. Then, we re-
sume the training for 80 epochs, while incrementing
α by 0.1 every 20 epochs, starting from α=0. In S2,
the whole model is updated during these 80 epochs.
However, in S3, only the visibility predictor is trained
during this step, while the remaining weights (feature
extractor and coordinate estimator) are frozen.
4.4 Base Models
We implemented for the experiments three base mod-
els with our method, besides Simple Baseline. We
first used EfficientNet as a feature extractor (Tan and
Le, 2019), which is more recent than ResNet. We em-
ployed two different sizes: B0 (the smallest) and B6
(the second largest). We followed the same training
strategy and reused the heatmap generator from the
Simple Baseline model.
We also set up our metamodel with the MSPN net-
work (Li et al., 2019), as a feature extractor and a
heatmap generator. Because MSPN uses a multi-stage
architecture, we extracted the feature vector from the
output of the last encoder to feed the visibility mod-
ule. We initialized the model with the weights already
trained on COCO for human pose estimation.
4.5 Evaluation
The performance of the coordinate prediction mod-
ule was measured using two metrics. First, we
used the regular metric for the COCO dataset called
AP OKS (Lin et al., 2015). This metric computes
the average precision and recall using a score called
OKS. However, this metric is person-centered and
does not provide information on the model perfor-
mance of each keypoint detection. Furthermore, this
metric only considers labeled keypoints, i.e., visible
and non-visible keypoints, which puts aside false-
positive predictions. Therefore, we also evaluated the
models with the mAPK metric (Guesdon et al., 2021).
This metric provides an evaluation at a keypoint level
and allows to measure the performance of the model
on each body part separately.
5 RESULTS
In this section, we present and discuss the perfor-
mance of the proposed metamodel. More precisely,
we first study the quality of the visibility predictions
using different strategies to train the models. Then,
we study the impact of the visibility prediction on
the keypoint detection task using both AP OKS and
mAPK metrics. Finally, we discuss the performance
of the proposed solution with different base models.
5.1 Visibility Prediction
We tried out several strategies to train the model, de-
scribed in Section 4.3. The performance of the three
resulting networks is presented in Table 1.
Table 1: F1-score of the network for visibility prediction on
COCO 2017 val set with different training strategies.
Strategy non-labeled non-visible visible total
S1 0.72 0.21 0.76 0.71
S2 0.75 0.34 0.79 0.74
S3 0.77 0.37 0.80 0.76
First, we can observe in Table 1 that pre-training
the network on the keypoint estimation task (S2 and
S3) outperforms the joint training of the three mod-
ules (S1). Indeed, we can notice an increase of 5% of
the total F1-score between S1 and S3. This improve-
ment is mostly perceptible in the non-visible class
(gain of 16%). However, training on the visibility task
while freezing the rest of the network (S3) does not
impact the overall performance. Indeed, we trained
several models and present in Table 1 the model for
each strategy with the best performance. Neverthe-
less, we observed little performance differences be-
tween the networks trained with and without freezing.
In the end, this experiment demonstrates that already
trained HPE networks can be used with our meta-
model and reach optimal performance. This allows
saving time and computing power, especially with a
large dataset like COCO.
Regarding the performance of visibility predic-
tion, results in Table 1 show that we are able to predict
keypoint visibility with a total F1-score up to 76%.
However, we can notice that the model has difficul-
ties to predict the ”non-visible” class, with a maxi-
mum F1-score of 37%. Two reasons can explain this
gap. First, non-visible keypoint is a subjective notion,
since it corresponds to the keypoints which are oc-
cluded but where we have enough information in the
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
432
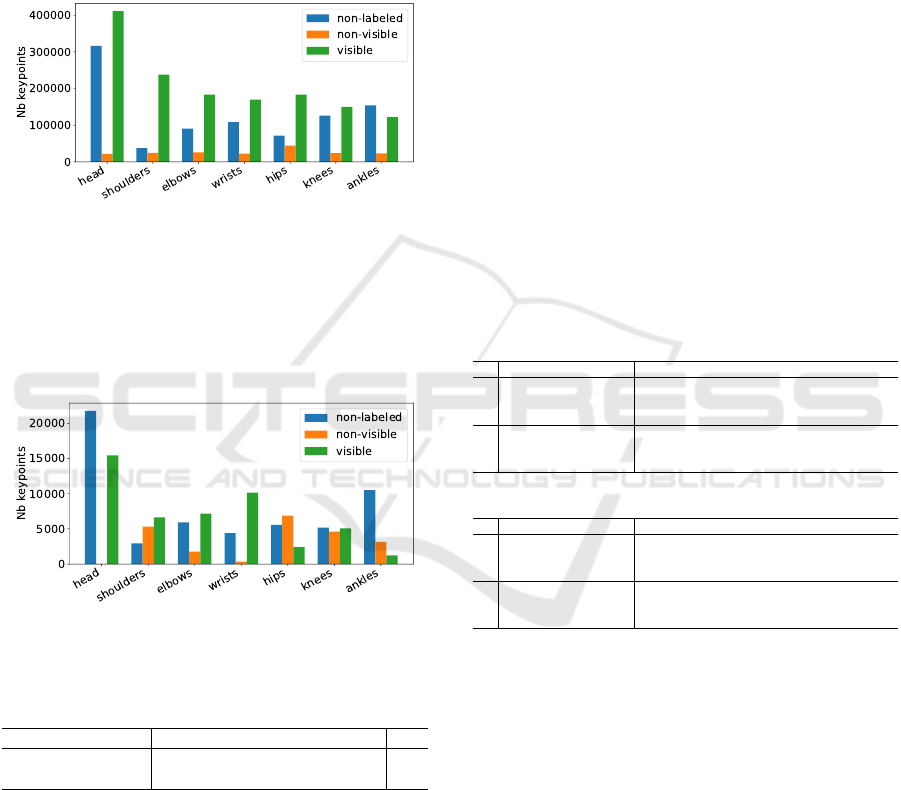
image to deduce the location of the keypoint. Because
the assessment of the ”enough information” is left to
the annotator, it leads to inconsistency in the annota-
tions. Secondly, the keypoints labeled as non-visible
represent only 7% of the COCO keypoints (Figure 5).
Even if this distribution gap is taken into considera-
tion in the computation of the weighted cross-entropy
cost function L
v
, it still has a negative impact on the
learning process.
Figure 5: Distribution of the keypoint visibility labels in the
COCO dataset.
To study the impact of the distribution of examples
of the three visibility classes, we finetuned our net-
work on DriPE dataset (Guesdon et al., 2021). This
dataset presents a more homogeneous keypoints class
distribution, as shown in Figure 6.
Figure 6: Distribution of the keypoint visibility labels in the
DriPE dataset.
Table 2: Performance of the network for visibility predic-
tion on DriPE dataset before and after finetuning.
F1-score non-labeled non-visible visible total
COCO baseline 0.71 0.34 0.64 0.60
Finetuned on DriPE 0.81 0.70 0.76 0.76
As we can see in Table 2, after finetuning, the
model achieves an F1-score of 70% for the non-
visible keypoints. These results demonstrate that with
a better distribution of the visibility classes and more
homogeneous images, our metamodel is able to bet-
ter estimate the visibility of keypoints, in particular
for non-visible classes.
5.2 Keypoint Estimation
We now study the impact of the addition of the
visibility module on the performance of the key-
point detection. We use for this study the mAPK
metric (Guesdon et al., 2021), which provides a
more keypoint-centered performance measurement
than AP OKS (Lin et al., 2015). Similar to AP OKS,
mAPK measures both average precision (AP) and av-
erage recall (AR). We provide results for both COCO
(Table 3) and DriPE (Table 4) datasets. The ”SBl +
visibility” network refers to the implementation of our
metamodel with the Simple Baseline network. The
”non-0” term defines the experiment where all key-
point coordinates predicted by the visibility module as
”non-labeled” are considered as not predicted for the
computation of the mAPK metric. This strategy aims
to improve the precision on scenes where some key-
points are outside the image or strongly occluded of
the keypoint prediction module, which is classically
designed to predict coordinates for each type of key-
point during inference.
Table 3: HPE on the COCO 2017 validation set with
mAPK.
configuration Head Sho. Elb. Wri. Hip Knee Ank. Mean
AP
SBl 0.66 0.76 0.73 0.70 0.74 0.74 0.74 0.72
SBl + visibility 0.66 0.76 0.72 0.70 0.73 0.73 0.73 0.72
SBl + visibility + non-0 0.71 0.78 0.77 0.73 0.73 0.76 0.74 0.75
AR
SBl 0.73 0.77 0.73 0.70 0.70 0.72 0.72 0.72
SBl + visibility 0.73 0.76 0.73 0.69 0.70 0.72 0.72 0.72
SBl + visibility + non-0 0.43 0.72 0.58 0.68 0.68 0.66 0.35 0.59
Table 4: HPE on the DriPE test set with mAPK.
configuration Head Sho. Elb. Wri. Hip Knee Ank. Mean
AP
SBl 0.85 0.90 0.94 0.96 0.98 0.95 0.68 0.89
SBl + visibility 0.84 0.90 0.94 0.96 0.98 0.95 0.68 0.89
SBl + visibility + non-0 0.86 0.90 0.94 0.97 0.98 0.96 0.72 0.90
AR
SBl 0.87 0.96 0.96 0.97 0.98 0.95 0.80 0.93
SBl + visibility 0.87 0.96 0.96 0.97 0.98 0.95 0.80 0.93
SBl + visibility + non-0 0.44 0.96 0.85 0.97 0.98 0.93 0.77 0.84
Firstly, we can observe that our metamodel
(SBl + visibility) achieves performance similar to the
SBl baseline on keypoint detection. It indicates that
adding the visibility task has no negative impact on
the primary task, regardless of the dataset used.
Secondly, the non-0 strategy slightly improves the
average precision of the keypoint detection, which
denotes a decrease in the number of false positives.
However, this precision increase comes with a nega-
tive trade-off regarding the average recall, caused by
an increase of the false negatives. The decrease of the
recall is significant for the keypoints on the head, el-
bow, and ankles. Prediction of the visibility on the
face is a delicate task since almost none of these key-
points are labeled as non-visible due to the COCO an-
notation style. Ankles are also difficult keypoints to
predict in a general context, even if it is less observ-
Multitask Metamodel for Keypoint Visibility Prediction in Human Pose Estimation
433

Table 5: Performance of the network for keypoint detection on COCO 2017 with different base models.
Table 6: Performance of the network for keypoint detection on DriPE with different base models.
Base model parameters AP AP
50
AP
75
AP
M
AP
L
AR AR
50
AR
75
AR
M
AR
L
SBl 71.2M 71.9 91.5 79.0 69.2 76.4 75.3 92.8 81.8 72.1 80.1
EfficientNet B0 55.6M 67.1 90.4 74.9 63.9 71.7 70.3 91.1 77.0 66.8 75.5
EfficientNet B6 95.5M 72.5 92.4 80.1 69.8 76.9 75.8 93.0 82.7 72.6 80.7
MSPN 2-stg 104.6M 71.8 92.5 81.4 69.0 76.1 75.3 93.5 83.8 71.9 80.3
Table 7: Qualitative comparison of keypoints prediction filtered with a confidence threshold (top row) and with the visibility
predicted by our metamodel (bottom row). Red dots represent the false-positive keypoints.
Base model parameters AP AP
50
AP
75
AP
M
AP
L
AR AR
50
AR
75
AR
M
AR
L
SBl 71.2M 96.5 99.9 99.9 - 96.5 97.5 99.9 99.9 - 97.5
EfficientNet B0 55.6M 91.8 99.0 99.0 - 91.8 94.7 99.9 99.6 - 94.7
EfficientNet B6 95.5M 99.4 99.0 99.0 - 94.4 96.5 99.9 99.6 - 96.5
MSPN 2-stg 104.6M 97.8 99.0 99.0 - 97.8 99.0 99.9 99.9 - 99.0
able in the DriPE dataset due to the lower number of
labeled ankles. In the end, an increase of precision
can be useful in applications that require high confi-
dence in the predicted keypoints.
Table 8: Performance of the network for visibility predic-
tion on COCO 2017 with different base models.
Base model parameters non-labeled non-visible visible total
SBl 71.2M 0.77 0.37 0.80 0.76
EfficientNet B0 55.6M 0.74 0.32 0.77 0.73
EfficientNet B6 95.5M 0.75 0.34 0.80 0.76
MSPN 2-stg 104.6M 0.69 0.34 0.69 0.67
We present qualitative results in Figure 7. As
we observed in Tables 3 and 4, the gain in precision
comes mostly from face keypoints. This is illustrated
by face keypoints which were predicted even with
the strong occlusion and the lack of information (Fig-
ure 7-A,B). However, the precision of other parts pre-
diction has also been improved, such as knees (Fig-
ure 7-C). Finally, the negative trade-off regarding the
recall is caused by keypoints that were correctly pre-
dicted by the coordinate estimator but predicted as
non-labeled by the visibility predictor (Figure 7-D).
5.3 Other Base Models
We evaluated our metamodel with different HPE ar-
chitectures: EfficientNet B0 and B6, and MSPN. The
performance of these implementations can be found
in Tables 7 and 8. The two tasks were trained succes-
sively while freezing the feature extractor during the
visibility task training.
As we can observe, the models achieve good per-
formance on pose estimation while reaching perfor-
mance on visibility prediction similar to the one pre-
sented in Table 1. These results intend to demon-
strate that our metamodel can be deployed with net-
works of varied sizes and architectures while preserv-
ing the performance on both tasks. Please note that we
trained each network only once except SBl which is
used as the baseline for our study. Therefore, these re-
sults may not reflect the optimal performance of each
network.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
434

Table 9: Performance of the network for visibility predic-
tion on DriPE with different base models.
Base model parameters non-labeled non-visible visible total
SBl 71.2M 0.81 0.70 0.76 0.76
EfficientNet B0 55.6M 0.72 0.54 0.72 0.69
EfficientNet B6 95.5M 0.78 0.58 0.63 0.67
MSPN 2-stg 104.6M 0.57 0.55 0.46 0.51
Finally, we finetuned and evaluated the networks
on DriPE dataset (Tables 7 and 9). The models still
achieve 60% of visibility prediction while reaching
over 90% of precision and recall on the keypoint es-
timation. We can notice that the performance of the
MSPN network is below what we could expect for
such a large number of parameters. An adjustment
of the training and finetuning parameters could im-
prove performance, especially considering the size of
the network. Also, because of the multiscale and mul-
tistage architecture of MSPN, concatenating several
scale levels to extract the feature vector from the net-
work could improve the results.
6 CONCLUSIONS
In this paper, we have presented a new metamodel for
human pose estimation and visibility prediction. This
method achieves good performance on visibility pre-
diction while preserving the performance of the key-
point estimation of the base model. We demonstrated
that these results can be achieved using different base
models. We also showed that the metamodel performs
well on two public datasets regarding the visibility
prediction: the COCO dataset, a general and state-of-
the-art dataset, and the DriPE dataset which contains
images with stronger occlusion. Finally, we used the
predicted visibility to improve the keypoint detection,
by discarding the keypoints predicted as non-labeled.
Our results show that this strategy can improve the
precision of the detection, even though it may reduce
the recall, especially for head and ankles keypoints.
Future work will investigate strategies to improve
the precision of keypoint coordinates estimation using
visibility prediction with a lesser negative trade-off on
recall. For instance, we could combine the predicted
confidence of the two tasks for a final prediction. Fur-
thermore, it would be interesting to study the integra-
tion of the proposed metamodel to multi-scale archi-
tectures, like MSPN architecture. These architectures
present a higher performance on keypoint estimation,
but the proposed integration still does not take full ad-
vantage of the multiscale features available. Finally, it
would be interesting to study the influence of the gain
of keypoint estimation accuracy in practical applica-
tions, such as action recognition or posture analysis in
car-safety applications.
ACKNOWLEDGEMENTS
This work was supported by the Pack Ambition
Recherche 2019 funding of the French AURA Region
in the context of the AutoBehave project.
REFERENCES
Andriluka, M., Pishchulin, L., Gehler, P., and Schiele, B.
(2014). 2d human pose estimation: New benchmark
and state of the art analysis. In 2014 IEEE Conference
on Computer Vision and Pattern Recognition, pages
3686–3693.
Artacho, B. and Savakis, A. (2020). Unipose: Unified hu-
man pose estimation in single images and videos. In
Proceedings of the IEEE/CVF Conference on Com-
puter Vision and Pattern Recognition (CVPR), pages
7035–7044.
Cai, Y., Wang, Z., Luo, Z., Yin, B., Du, A., Wang,
H., Zhang, X., Zhou, X., Zhou, E., and Sun, J.
(2020). Learning delicate local representations for
multi-person pose estimation. In Vedaldi, A., Bischof,
H., Brox, T., and Frahm, J.-M., editors, Computer Vi-
sion – ECCV 2020, pages 455–472, Cham. Springer
International Publishing.
Cao, Z., Hidalgo, G., Simon, T., Wei, S.-E., and Sheikh, Y.
(2019). Openpose: realtime multi-person 2d pose esti-
mation using part affinity fields. IEEE transactions on
pattern analysis and machine intelligence, 43(1):172–
186.
Cao, Z., Simon, T., Wei, S.-E., and Sheikh, Y. (2017). Real-
time multi-person 2d pose estimation using part affin-
ity fields. In 2017 IEEE Conference on Computer Vi-
sion and Pattern Recognition (CVPR), pages 1302–
1310.
Carreira, J., Agrawal, P., Fragkiadaki, K., and Malik, J.
(2016). Human pose estimation with iterative error
feedback. In 2016 IEEE Conference on Computer Vi-
sion and Pattern Recognition (CVPR), pages 4733–
4742.
Chen, Y., Shen, C., Wei, X.-S., Liu, L., and Yang, J. (2017).
Adversarial posenet: A structure-aware convolutional
network for human pose estimation. In 2017 IEEE
International Conference on Computer Vision (ICCV),
pages 1221–1230.
Chu, X., Yang, W., Ouyang, W., Ma, C., Yuille, A. L., and
Wang, X. (2017). Multi-context attention for human
pose estimation. In 2017 IEEE Conference on Com-
puter Vision and Pattern Recognition (CVPR), pages
5669–5678.
Das, S., Koperski, M., Bremond, F., and Francesca, G.
(2017). Action recognition based on a mixture of rgb
and depth based skeleton. In 2017 14th IEEE Inter-
national Conference on Advanced Video and Signal
Based Surveillance (AVSS), pages 1–6.
Guesdon, R., Crispim-Junior, C., and Tougne, L. (2021).
Dripe: A dataset for human pose estimation in
real-world driving settings. In Proceedings of the
Multitask Metamodel for Keypoint Visibility Prediction in Human Pose Estimation
435

IEEE/CVF International Conference on Computer Vi-
sion (ICCV) Workshops, pages 2865–2874.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Proceedings of
the IEEE Conference on Computer Vision and Pattern
Recognition (CVPR).
Hidalgo, G., Raaj, Y., Idrees, H., Xiang, D., Joo, H., Simon,
T., and Sheikh, Y. (2019). Single-network whole-body
pose estimation. In Proceedings of the IEEE/CVF
International Conference on Computer Vision, pages
6982–6991.
Ke, L., Chang, M.-C., Qi, H., and Lyu, S. (2018). Multi-
scale structure-aware network for human pose esti-
mation. In Ferrari, V., Hebert, M., Sminchisescu,
C., and Weiss, Y., editors, Computer Vision – ECCV
2018, pages 731–746, Cham. Springer International
Publishing.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012).
Imagenet classification with deep convolutional neu-
ral networks. In Pereira, F., Burges, C. J. C., Bottou,
L., and Weinberger, K. Q., editors, Advances in Neu-
ral Information Processing Systems 25, pages 1097–
1105. Curran Associates, Inc.
Kumar, A., Alavi, A., and Chellappa, R. (2017). Kepler:
Keypoint and pose estimation of unconstrained faces
by learning efficient h-cnn regressors. In 2017 12th
IEEE International Conference on Automatic Face
Gesture Recognition (FG 2017), pages 258–265.
Kumar, A., Marks, T. K., Mou, W., Wang, Y., Jones, M.,
Cherian, A., Koike-Akino, T., Liu, X., and Feng, C.
(2020). Luvli face alignment: Estimating landmarks’
location, uncertainty, and visibility likelihood. In Pro-
ceedings of the IEEE/CVF Conference on Computer
Vision and Pattern Recognition, pages 8236–8246.
Li, W., Wang, Z., Yin, B., Peng, Q., Du, Y., Xiao, T., Yu,
G., Lu, H., Wei, Y., and Sun, J. (2019). Rethinking on
multi-stage networks for human pose estimation.
Lin, T.-Y., Doll
´
ar, P., Girshick, R., He, K., Hariharan, B.,
and Belongie, S. (2017). Feature pyramid networks
for object detection. In 2017 IEEE Conference on
Computer Vision and Pattern Recognition (CVPR),
pages 936–944.
Lin, T.-Y., Maire, M., Belongie, S., Bourdev, L., Girshick,
R., Hays, J., Perona, P., Ramanan, D., Zitnick, C. L.,
and Doll
´
ar, P. (2015). Microsoft coco: Common ob-
jects in context.
Newell, A., Huang, Z., and Deng, J. (2017). Associative
embedding: End-to-end learning for joint detection
and grouping. In Guyon, I., Luxburg, U. V., Ben-
gio, S., Wallach, H., Fergus, R., Vishwanathan, S., and
Garnett, R., editors, Advances in Neural Information
Processing Systems 30, pages 2277–2287. Curran As-
sociates, Inc.
Newell, A., Yang, K., and Deng, J. (2016). Stacked Hour-
glass Networks for Human Pose Estimation. In Leibe,
B., Matas, J., Sebe, N., and Welling, M., editors, Com-
puter Vision – ECCV 2016, pages 483–499, Cham.
Springer International Publishing.
Nie, X., Feng, J., Xing, J., and Yan, S. (2018). Pose partition
networks for multi-person pose estimation. In Com-
puter Vision – ECCV 2018, pages 684–699, Cham.
Springer International Publishing.
Stoffl, L., Vidal, M., and Mathis, A. (2021). End-to-end
trainable multi-instance pose estimation with trans-
formers.
Sun, K., Xiao, B., Liu, D., and Wang, J. (2019). Deep high-
resolution representation learning for human pose es-
timation. In 2019 IEEE/CVF Conference on Com-
puter Vision and Pattern Recognition (CVPR), pages
5686–5696.
Sun, X., Shang, J., Liang, S., and Wei, Y. (2017). Composi-
tional human pose regression. In 2017 IEEE Interna-
tional Conference on Computer Vision (ICCV), pages
2621–2630.
Szegedy, C., Liu, W., Jia, Y., Sermanet, P., Reed, S.,
Anguelov, D., Erhan, D., Vanhoucke, V., and Rabi-
novich, A. (2015). Going deeper with convolutions.
In Proceedings of the IEEE Conference on Computer
Vision and Pattern Recognition (CVPR).
Tan, M. and Le, Q. (2019). Efficientnet: Rethinking model
scaling for convolutional neural networks. In Interna-
tional Conference on Machine Learning, pages 6105–
6114. PMLR.
Tang, W. and Wu, Y. (2019). Does learning specific fea-
tures for related parts help human pose estimation? In
2019 IEEE/CVF Conference on Computer Vision and
Pattern Recognition (CVPR), pages 1107–1116.
Tang, W., Yu, P., and Wu, Y. (2018). Deeply learned compo-
sitional models for human pose estimation. In Ferrari,
V., Hebert, M., Sminchisescu, C., and Weiss, Y., edi-
tors, Computer Vision – ECCV 2018, pages 197–214,
Cham. Springer International Publishing.
Toshev, A. and Szegedy, C. (2014). Deeppose: Human pose
estimation via deep neural networks. In 2014 IEEE
Conference on Computer Vision and Pattern Recogni-
tion, pages 1653–1660.
Xiao, B., Wu, H., and Wei, Y. (2018). Simple baselines
for human pose estimation and tracking. In Ferrari,
V., Hebert, M., Sminchisescu, C., and Weiss, Y., edi-
tors, Computer Vision – ECCV 2018, pages 472–487,
Cham. Springer International Publishing.
Zhao, L., Xu, J., Zhang, S., Gong, C., Yang, J., and Gao,
X. (2020a). Perceiving heavily occluded human poses
by assigning unbiased score. Information Sciences,
537:284–301.
Zhao, M., Beurier, G., Wang, H., and Wang, X. (2020b).
A pipeline for creating in-vehicle posture database
for developing driver posture monitoring systems.
In DHM2020: Proceedings of the 6th International
Digital Human Modeling Symposium, August 31-
September 2, 2020, volume 11, pages 187–196. IOS
Press.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
436
