
3D Map Generation with Shape and Appearance Information
Taro Yamada
*
and Shuichi Enokida
Kyushu Institute of Technology, Iizuka-shi, Fukuoka, Japan
Keywords: Robotics, Visual SLAM, Semantic Segmentation.
Abstract: It is clear from the numerous reports of recent years that interest in the research and development of
autonomous mobile robots is growing and that a key requirement for the successful development of such self-
directed machines is effective estimations of the navigable domain. Furthermore, in view of the differing
characteristics of their physical performance capabilities relative to specific applications, specific estimations
must be made for each robot. The effective assessment of a domain that permits successful robot navigation
of a densely occupied indoor space requires the generation of a fine-grained three-dimensional (3D) map to
facilitate its safe movements. This, in turn, requires the provision of appearance information as well as space
shape ascertainment. To addresFs these issues, we herein propose a practical Semantic Simultaneous
Localization and Mapping (Semantic SLAM) method capable of yielding labeled 3D maps. This method
generates maps by class-labeling images obtained via semantic segmentation of 3D point groups obtained
with Real-Time Appearance-Based Mapping (RTAB-Map).
1 INTRODUCTION
Interest in the research and development of
autonomous mobile robots has rapidly grown in
recent years because such machines promise to
reduce the human burdens needed to perform routine
functions such as providing cleaning and security
services at train stations, shopping malls, and other
public facilities. However, for a robot to move
autonomously in an actual environment, a key
requirement is its ability to effectively estimate its
navigable domain, and this ability will vary
depending on the robot’s size, suspension capability,
and other factors. Accordingly, such estimations must
be determined for each robot.
It is also necessary to consider the robot body
structure in order to facilitate safe navigation and to
determine efficient routes. This is particularly true
when it is necessary for a robot to navigate a densely
occupied indoor space, in which case its ability to
make a detailed determination of the most proximate
environment is essential. Such environmental
recognition information may involve using
appearance information to distinguish objects, states,
and material properties based on appearances.
*
https://www.kyutech.ac.jp
One means of obtaining such appearance
information is semantic segmentation, which is a
method that may also facilitate the recognition of
objects and materials at the pixel level from images
of the robot’s environment. However, because
appearance information is two-dimensional (2D),
even if a step is present in front of a door, as shown
in Fig. 1, it will be identified as a single domain.
In contrast, shape information can be more
immediately useful because it yields fine-grained
three-dimensional (3D) information, thus permitting
recognition of steps and slopes. As a result, the
obtained shape information can ensure the
recognition of steps and other 3D objects, and
ascertainments based on that capacity are thus
applicable to navigable domains.
However, shape information cannot, by itself,
identify domain states or materials. Accordingly, in
the present study, as a process for estimating
navigable domains of robots that considers their
physical structure, we herein propose a Semantic
Simultaneous Localization and Mapping (Semantic
SLAM) method capable of generating labeled 3D
maps and obtaining both shape and appearance
information simultaneously.
Yamada, T. and Enokida, S.
3D Map Generation with Shape and Appearance Information.
DOI: 10.5220/0010812900003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 4: VISAPP, pages
743-748
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
743

Figure 1: Identifying a floor with a step as a continuous
single-level domain.
Figure 2: Result shown in Li et al.
2 RELEVANT STUDIES
SLAM studies with labeled 3D point group class
information have been performed by numerous
researchers in recent years, and the resulting methods
can be separated into two main categories.
In one category, the objects in the image are first
distinguished, after which image-based mapping is
then added to generate the 3D point group. One
method belonging to this category, which was
proposed by Li et al, produces semantic segmentation
output using a convolutional neural network (CNN)
and Large-Scale Direct Monocular-SLAM (LSD-
SLAM), thereby producing results such as those
shown in Fig. 2.
Another method in this category, also proposed by
Liu et al, incorporates object detection by Single Shot
MultiBox Detector (SSD) into ORB(Oriented FAST
and Rotated BRIEF)- SLAM2 to generate 3D point
groups. However, since both of these methods
employ a camera as a sensor, they are strongly
affected by camera parameter divergence, light
reflection, halation, and other such effects, and
neither can generate dense point groups. As a result,
they are unsuitable for autonomous mobile robot
obstacle avoidance or navigation.
To resolve these problems, the method proposed
in Ref, which uses an RGB-D camera as the sensor,
combines the use of Real-Time Appearance-Based
Mapping (RTAB-Map) and the YOLOv2 single-
stage real-time object detection model to perform
highly accurate real-time detection. More specifically,
the method uses RTAB-Map to generate high-density
broad-ranging labeled 3D maps. Meanwhile,
YOLOv2 object detection enables labeling of bags,
mugs, cars, and other such objects – but not walls,
floors, or other such domains.
The second category comprises methods in which
directly labeled 3D point groups are generated with
PointNet or some other deep learning process.
However, it must be noted that identification methods
based on 3D point groups are far more difficult than
image-based recognition methods and generally lead
to network construction complexity. Additionally, the
necessity of using complete 3D point groups as
network input makes those methods inappropriate for
online mapping with SLAM, while the inability of
this method type to consider appearance information
also makes it difficult to distinguish between doors
and walls, earthen and flooring surfaces, and other
planar surface states.
In contrast, in conjunction with a method for
labeling of high-density expansive 3D point groups
generated via an RGB-D camera, our proposed
SLAM method enables the generation of 3D maps
capable of fine-grained discernment of the robot’s
environment through the use of close real-time
semantic segmentation capable of recognizing both
domain and object content.
3 3D MAP GENERATION WITH
SHAPE AND APPEARANCE
INFORMATION
3.1 Shape Information Acquisition
with RTAB-Map
RTAB-Map is an open-source library available since
2013. Its current expanded range of functions enables
the generation of high-density, high-resolution maps
in correspondence with arrays of stereo and RGB-D
cameras and light detection and ranging (LiDAR)
sensors to provide practical SLAM. Figure 3 shows
the main nodes of RTAB-Map, which consists
essentially of a basic structure with mounted memory
processing referred to as Graph-base SLAM.
Inputs, which are synchronized and transferred to
the graph-based SLAM, consist of camera input
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
744
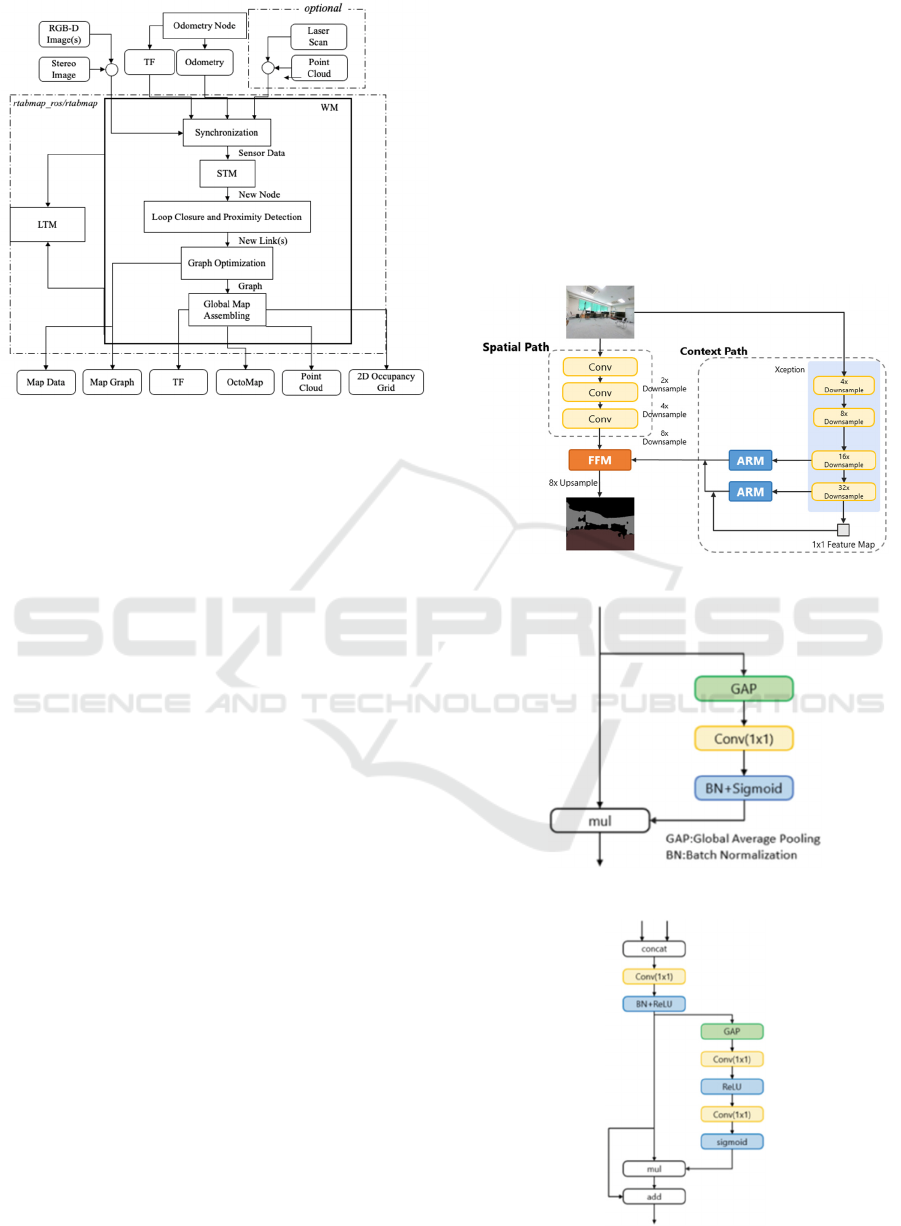
Figure 3: RTAB-Map main node schematic.
including the calibration message, transform(TF)
defining the sensor positioning relative to the robot,
odometry from a freely selected source, and
(optionally) 2D LiDAR laser scans or 3D point clouds.
The map structure of the graph-based SLAM
algorithm is graphic with linked nodes. An adjacent
link with a node is generated by the Short-Term
Memory(STM) from the synchronized input, loop
closure input produced by an image-based bag-of-
words, and/or a new link added by laser scan-based
proximity detection.
The constructed graph is optimized and output as
a 3D point cloud or an occupancy grid map by the
global map assembly module. Additionally, a
memory management function is mounted on the
RTAB-Map, and the number of nodes used for loop
closure detection is limited by working memory
(WM) and long-term memory (LTM) memory
management, thus maintaining real-time performance
even if the map grows to a large-scale size.
3.2 Appearance Information
Acquisition by Semantic
Segmentation
For appearance information, a Bilateral Segmentation
Network (BiSeNet) was used to provide real-time
semantic segmentation. BiSeNet is designed to
resolve the tradeoff between real-time and output
image precision.
As shown by its network schematic in Fig. 4,
BiSeNet is characterized by its use of two paths. In the
spatial path, a features map holding spatial information
is generated by three convolution layers (stride=2),
while in the context path, multiple reduced-size feature
maps are output by the Xception module. A features
map bearing contextual information is output by their
passage through an attention refinement module (Fig.
5) holding global average pooling.
Lower- and higher-level feature maps obtained in
the spatial and context paths, respectively, are
efficiently combined in the feature fusion module
(Fig. 6) to facilitate high-precision semantic
segmentation. This method yielded a 68.4% mean
intersection-over-union (IOU) at a rate of 105 frames
per second (FPS) for Cityscapes test data.
Figure 4: BiSeNet schematic.
Figure 5: ARM schematic.
Figure 6: FFM schematic.
3D Map Generation with Shape and Appearance Information
745
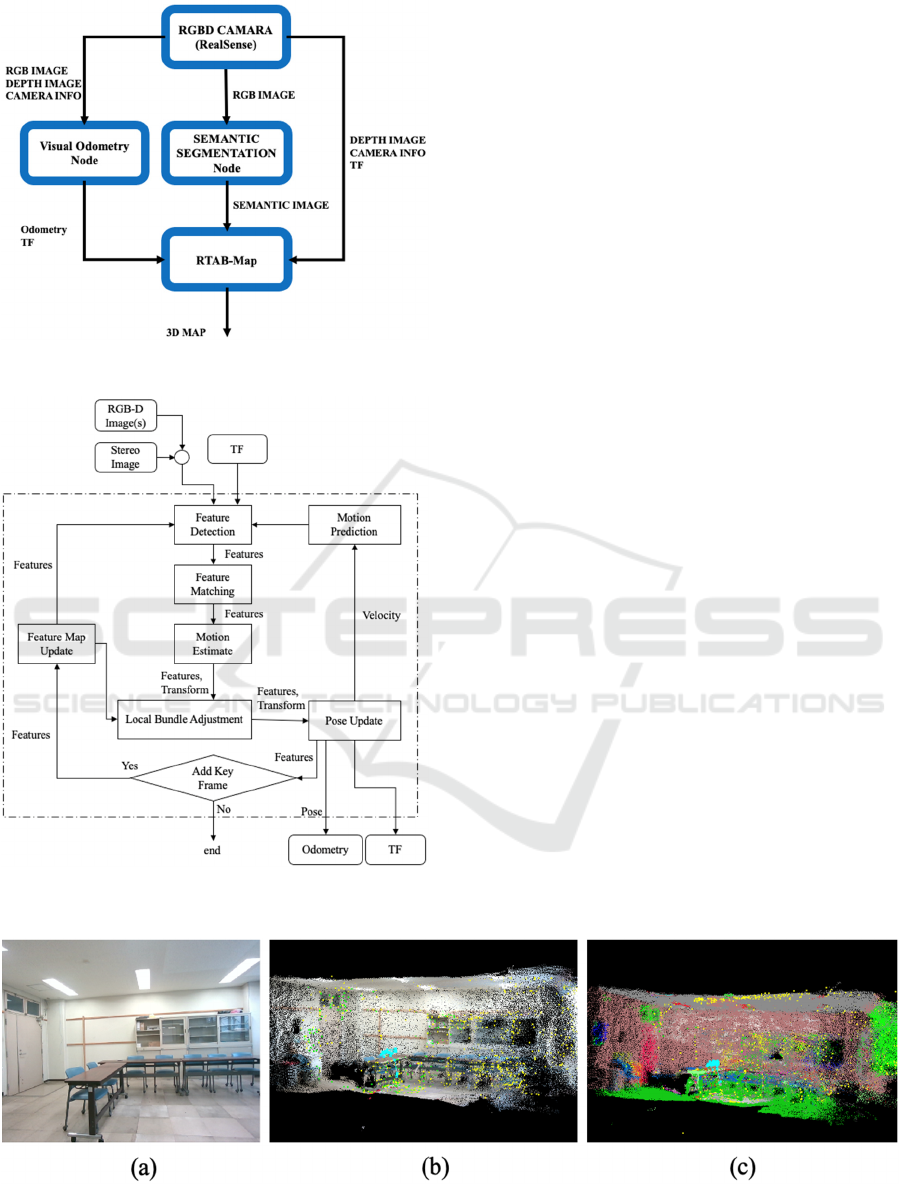
Figure 7: ROS composition used in the present study.
Figure 8: Visual odometry node schematic.
3.3 Shape and Appearance
Information Integration
In the present study, we constructed an internodal
communication system using the Robot Operating
System (ROS) composition shown schematically in
Fig. 7. For odometry input to RTAB-Map, we use
the visual odometry provided by the RTAB-Map
library, as shown schematically in Fig. 8.
The feature point is first extracted from the input
image (feature detection), after which the Binary
Robust Independent Elementary Features (BRIEF)
descriptor of the detected feature is then compared
with the feature map, and matched (feature
matching) by nearest-neighbor search.
When a corresponding point is computed, the
current rate of frame conversion on the feature map
is calculated (motion estimate) using Perspective-n-
Point (PnP) packaged with OpenCV. Finally, the
total number of key frame features on the feature
map is optimized (local bundle adjustment) with g
2
o,
which is an open-source C++ framework for
optimizing graph-based nonlinear error functions,
and the odometry is updated (pose update).
The feature points extracted after input by the
visual odometry node are reused to generate the
image vector for loop closure detection at the
RTAB-Map main node. Next, a visual-based
odometry estimation and an RGB image-based loop
closure are performed. Here, it should be noted that
the semantic segmentation output image is only used
for 3D point group coloring and that all inputs to the
RTAB-Map nodes in the present study are unified at
30 FPS and synchronized completely using ROS
time stamps.
Figure 9: (a) Movement ascertainment environment, (b) pre-existent RTAB-Map output, (c) output of RTAB-Map labeled
with a semantic segmentation output image.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
746
4 MOVEMENT
ASCERTAINMENT
The proposed method was implemented with an Intel
RealSense D455 as the RGB-D camera. ADE20K was
used as the training data for semantic segmentation.
ADE20K provides images and pixel-level annotations
of various scenes and objects, and classifies 150 classes.
odometry of RTAB-Map. F2M provided by the library
was used. Figure 9 shows a room mapping result
produced via this method, and Fig. 10 shows the
mapping result produced by walking one lap around a
corridor (97.0m) and returning to the starting position.
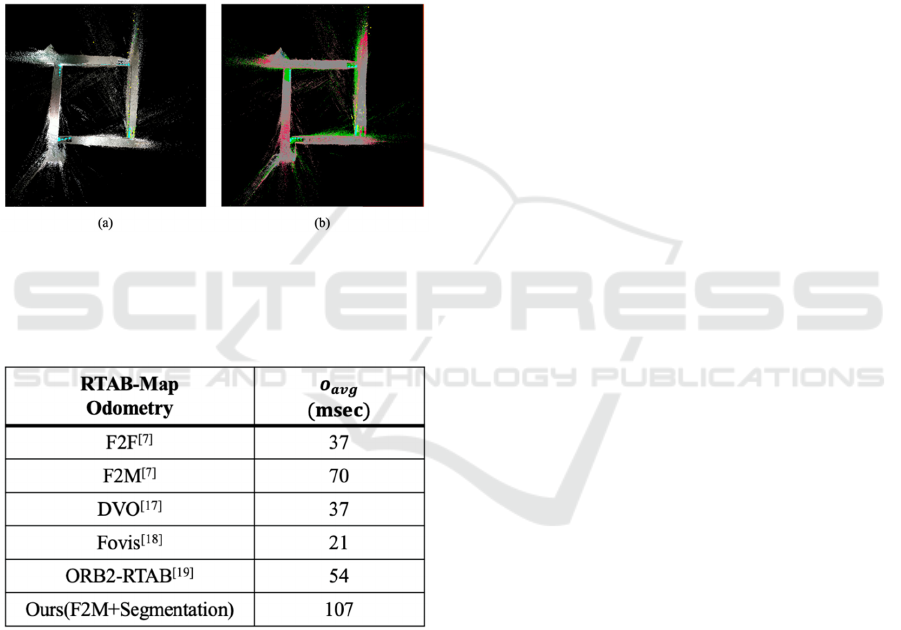
Figure 10: Output with loop closure detection: (a) pre-
existent RTAB-Map, (b) RTAB-Map output labeled with a
semantic segmentation output image.
Table 1: Processing speed in the odometry approach
The processing speeds of other odometry
approaches are shown in Table 1. Table 1 shows that
although the processing time of the proposed method
is longer (107msc) than that of the conventional F2M
method (70msc), the proposed method retains a
certain degree of real-time performance and
odometry is functional. Correct loop closure detection
by operation ascertainment of the proposed method
shown in Fig. 10 was also confirmed.
Comparison with Relevant Studies. The map point
group completed by the method proposed in Li et al.
was only semi-dense because its generation was
based on LSD-SLAM. In contrast, it was possible to
complete a high-density map in this study because it
was generated based on RTAB-Map formation.
Additionally, despite the large scale of the map, the
real-time function was well maintained as a result of
the mounted memory management function.
The method proposed by Mao et al. labels the
object detected by YOLOv2 on the 3D map generated
by RTAB-Map. In contrast, the present method
utilizes semantic segmentation rather than object
detection, and thus permits labeling of floor, ceiling,
wall, and other domains as well as content objects.
However, a problem remains, as the present study
confirmed the presence of 3D points with semantic
segmentation for objects yielding indistinct object
boundary demarcation, which can prevent correct
labeling.
When using the direct segmentation of 3D point
groups described in PointNet, as proposed by Qi et al,
it is difficult to distinguish between doors and walls
or other regions on a given plane. In contrast, the
present study confirmed that doors and walls could be
correctly distinguished using our proposed method,
as shown in Fig. 9(c).
5 CONCLUSION
Herein, we proposed a SLAM method that uses
labeled 3D point group data obtained using an RGB-
D camera and verified its operation. For generating a
labeled 3D map, we implemented BiSeNet real-time
semantic segmentation to perform classification in
2D images and used corresponding depth imaging to
label 3D point groups in RTAB-Map.
The use of RTAB-Map enabled long-term high-
precision Semantic SLAM, but when performing
object labeling, the inter-object boundaries were
sometimes indistinct, which could prevent correct
labeling. Accordingly, our future studies will focus on
enhancing semantic labeling while giving
consideration to edge information and 3D point group
clustering. It is also considered likely that higher
resolution could be gained by inputting semantic
segmentation output images in visual odometry and
by canceling feature points representing noise
extracted from mobile objects in odometric
estimations and loop closure detections. Furthermore,
we may also consider improvements to robot
navigable domain estimation and travel route
planning with the labeled 3D maps.
3D Map Generation with Shape and Appearance Information
747

ACKNOWLEDGEMENTS
This work was supported by JSPS KAKENHI Grant
Number JP18H01463.
REFERENCES
Junji EGUCHI and Koichi OZAKI, “Extraction
Method of Travelable Area by Using of 3D-laser
Scanner - Development of Autonomous Mobile Robot
for Urban Area”, Transactions of the Society of
Instrument and Control Engineers, Vol52, No3,
152/159,2016.
Hideaki Suzuki, Akihisa Oya, Shinichi Yuda, “Obstacle
Avoidance of Mobile Robot Considering 3D Shape of
Environment”, Robomec , 1998.
X. Li and R. Belaroussi, “Semi-dense 3d semantic. mapping
from monocular slam”, Computer Vision and Pattern
Recognition, 2016.
W. Liu, D. Anguelov, D. Erhan, C. Szegedy, S. Reed and
C. Y. Fu, et al, SSD: Single Shot MultiBox Detector.
European Conference on Computer Vision, Springer
International Publishing, 21–37, 2016.
Mingyuan Mao, Hewei Zhang, Simeng Li, and Baochang
Zhang, “SEMANTIC-RTAB-MAP (SRM): A semantic
SLAM system with CNNs on depth images”,
Mathematical Foundations of Computing, 2019.
R. Q. Charles, H. Su, K. Mo and L. J. Guibas, “Pointnet:
Deep learning on point sets for 3d classification and
segmentation”, IEEE Conference on Computer Vision
and Pattern Recognition, 2017.
M. Labbé and F. Michaud, “RTAB-Map as an Open-Source
Lidar and Visual SLAM Library for Large-Scale and
Long-Term Online Operation,” in Journal of Field
Robotics, vol. 36, no. 2, pp. 416–446, 2019.
M. Labbé and F. Michaud, “Long-term online multi-session
graph-based SPLAM with memory management,” in
Autonomous Robots, vol. 42, no. 6, pp. 1133-1150,
2018.
M. Labbé and F. Michaud, “Online Global Loop Closure
Detection for Large-Scale Multi-Session Graph-Based
SLAM,” in Proceedings of the IEEE/RSJ International
Conference on Intelligent Robots and Systems, 2014.
M. Labbé and F. Michaud, “Appearance-Based Loop
Closure Detection for Online Large-Scale and Long-
Term Operation,” in IEEE Transactions on Robotics,
vol. 29, no. 3, pp. 734-745, 2013.
M. Labbé and F. Michaud, “Memory management for real-
time appearance-based loop closure detection,” in
Proceedings of the IEEE/RSJ International Conference
on Intelligent Robots and Systems, pp. 1271–1276,
2011.
Changqian Yu et al, “BiSeNet: Bilateral segmentation
network for real-time semantic segmentation”,
European Conference on Computer Vision, pp. 325-341,
2018.
Chollet, F. “Xception: Deep Learning with Depthwise
Separable Convolutions”, IEEE Conference on
Computer Vision and Pattern Recognition, 2017.
Marius Cordts, Mohamed Omran, Sebastian Ramos, Timo
Rehfeld, Markus Enzweiler, Rodrigo Benenson, Uwe
Franke, Stefan Roth, and Bernt Schiele. “The cityscapes
dataset for semantic urban scene understanding”. In
Proceed- ings of the IEEE conference on computer
vision and pattern recognition, pages 3213–3223, 2016.
Kummerle, R., Grisetti, G., Strasdat, H., Konolige, K., and
Burgard, W. “g2o: A general framework for graph
optimization”. In Proceedings IEEE International
Conference on Robotics and Automation, pages 3607–
3613, 2011.
Bolei Zhou, Hang Zhao, Xavier Puig, Tete Xiao , Sanja
Fidler, Adela Barriuso and Antonio
Torralba, ”Semantic Understanding of Scenes through
the ADE20K Dataset”, International Journal on
Computer Vision , 2018.
Kerl, C., Sturm, J., and Cremers, D., “Dense visual SLAM
for RGB-D cameras”, In Proceedings IEEE/RSJ
International Conference on Intelligent Robots and
Systems, pages 2100–2106, 2013.
Huang, A. S., Bachrach, A., Henry, P., Krainin, M.,
Maturana, D., Fox, D., and Roy, N., “Visual odometry
and mapping for autonomous flight using an RGB-D
camera”, In Proceedings International Symposium on
Robotics Research, 2011.
Mur-Artal, R. and Tard ́os, J. D., “ORB-SLAM2: An open-
source SLAM system for monocular, stereo and RGB-
D cameras”, IEEE Transactions on Robotics,
33(5):1255–1262, 2017.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
748
