
Color-Light Multi Cascade Network for Single Image Depth Prediction
on One Perspective Artifact Images
Aufaclav Zatu Kusuma Frisky
1,2
, Simon Brenner
1
, Sebastian Zambanini
1
and Robert Sablatnig
1
1
Computer Vision Lab, Institute of Visual Computing and Human-Centered Technology,
Faculty of Informatik, TU Wien, Austria
2
Electronics and Instrumentations Lab, Department of Computer Science and Electronics,
Universitas Gadjah Mada, Yogyakarta, Indonesia
Keywords:
Single Image, Depth Prediction, Color-light, Multi Cascade, One-side Perspective, State-of-the-Art, Roman
Coins, Temple Relief.
Abstract:
Different color material and extreme lighting change pose a problem for single image depth prediction on
archeological artifacts. These conditions can lead to misprediction on the surface of the foreground depth re-
construction. We propose a new method, the Color-Light Multi-Cascade Network, to overcome single image
depth prediction limitations under these influences. Two feature extractions based on Multi-Cascade Networks
(MCNet) are trained to deal with light and color problems individually for this new approach. By concatenat-
ing both of the features, we create a new architecture capable of reducing both color and light problems. Three
datasets are used to evaluate the method with respect to color and lighting variations. Our experiments show
that the individual Color-MCNet can improve the performance in the presence of color variations and fails to
handle extreme light changes; the Light-MCNet, on the other hand, shows consistent results under changing
lighting conditions but lacks detail. When joining the feature maps of Color-MCNet and Light-MCNet, we
obtain a detailed surface both in the presence of different material colors in relief images, and under differ-
ent lighting conditions. These results prove that our networks outperform state-of-the-art in limited number
dataset. Finally, we also evaluate our joined network on the NYU Depth V2 Dataset to compare it with other
state-of-the-art methods and obtain comparable performance.
1 INTRODUCTION
3D scanners are widely used these days for digital
archiving of objects of cultural heritage (Georgopou-
los et al., 2010); however, 3D scanning of scenes and
multiple objects is time-consuming. The use of these
scanners is subject to high maintenance configura-
tions, such as the light, distance, and the number of
scans (Georgopoulos et al., 2010). The lack of en-
ergy sources at sites that are difficult to access exac-
erbates this problem. If scanning using high preci-
sion scanners is too expensive, archaeologists search
for time-efficient and robust alternatives (Frisky et al.,
2020). In practical terms, Single Image Reconstruc-
tion (SIR) is more time-efficient when opposed to
Structure-from-Motion and structure light scanning
techniques, as 3D models can be obtained efficiently
only using a single image. Distance prediction, re-
ferred to as Single Image Depth Prediction (SIDP),
is one of the crucial steps in the reconstruction phase
that uses in SIR (other than depth to 3D transfer), that
decides the final product’s quality (Ming et al., 2021).
Problems can arise in SIDP due to material ob-
ject colors and extreme lighting conditions. The ma-
terial color poses problems in two different scenar-
ios that usually appear in real-life depth prediction
(Frisky et al., 2021c). In the first scenario, surfaces at
different depths appear in the same color, leading to
misprediction at depth discontinuities. In the second
scenario, different surface colors appear in regions of
equal depth, leading to noise in the depth predictions.
Light conditions change the appearance of the ar-
tifact in the image. This phenomenon is also present
in outdoor scenes and thus appears in NYU Depth V2
(Silberman et al., 2012). To the best of our knowl-
edge, the handling of extreme light conditions is not
addressed in a specific manner in previous SIDP re-
search (Frisky et al., 2021b). An investigation in
Frisky et. al (Frisky et al., 2021b) work shows that
the state of the arts cannot handle the extreme change
Frisky, A., Brenner, S., Zambanini, S. and Sablatnig, R.
Color-Light Multi Cascade Network for Single Image Depth Prediction on One Perspective Artifact Images.
DOI: 10.5220/0010801100003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 4: VISAPP, pages
909-916
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
909

of light. It inspired us to create a new method that
is robust to both color and lighting variations. In
specific areas, such as cultural heritage applications,
most datasets contain a limited number of samples
(Brenner et al., 2018; Frisky et al., 2021a). This con-
dition also motivates a creation of a system that per-
forms well on small datasets.
The contributions of this paper are summarized as
follows:
1. We improve the architecture of the previous color
robust network (Color-MCNet) by changing the
number of dimensions of the transferred feature
map.
2. We create a new Light-MCNet architecture using
input from Intrinsic Image Decomposition to han-
dle extreme lighting variations.
3. We create a new a combined architecture by join-
ing the color- and Light-MCNet feature maps,
thereby improving both extreme lighting and ma-
terial color robustness of features in the final
output. Our system outperforms state-of-the-art
methods in small datasets.
2 RELATED WORK
Historically, single-image 3D reconstruction has
been approached via shape-from-shading (Ruo Zhang
et al., 1999). However, the pure shape from shad-
ing methods make use of only a single depth cue and
are sensitive to color variations and depth discontinu-
ities (Ming et al., 2021). Saxena et al. (Saxena et al.,
2009) estimated depth from a single image by train-
ing a Markov Random Field on local and global im-
age features. Oswald et al. (Oswald et al., 2012) im-
proved the performance using interactive user input
with the same depth estimation problem. In archae-
ology, the reconstruction of cultural objects using 2D
images is used because of its flexibility and efficiency
(Frisky et al., 2020). Pollefeys et al. (Pollefeys et al.,
2001) present an approach that obtains virtual mod-
els. Regarding the color in archeology artifacts, two
sub-problems need to be solved (Frisky et al., 2021c).
First, an exemplary system needs to be able to predict
the depth in the presence of different surface colors,
as they appear on relief surfaces. Second, the system
needs to reconstruct surfaces with different depths but
similar material colors. For most artifacts, foreground
and background (e.g. relief and wall) are made of the
same material.
In order to predict the depth and the shape, most
methods use RGB color as an input. In recent work,
Pan et al. (Pan et al., 2018) reconstruct a Borobudur
relief using single image reconstruction based on the
multi-depth approach from Eigen and Fergus (Eigen
and Fergus, 2015). However, the data used in their
paper does not involve different material colors. For
the requirement to solve these problems in the archae-
ological area, Frisky et al. provide a Registered Relief
Depth (RRD) dataset consisting of RGB images and
its corresponding depth on outdoor Borobudur (Frisky
et al., 2021a), and Prambanan reliefs (Frisky et al.,
2021c). Frisky et al. also propose a new method
called MCCNet (Frisky et al., 2021c) that uses the
cascaded color spaces with weight transfer to solve
both mentioned color problems.
Varying lighting situations pose another problem
for SIDP, which can affect performance and are dif-
ficult to control in natural environments. To the best
of our knowledge, no specific research available in
monocular depth reconstruction mentions this prob-
lem. Most recent research uses available datasets such
as an indoor NYU Depth Dataset, that only use nat-
ural light (Song et al., 2021). However, no specific
experiment shows that it is robust to extreme changes
in lighting direction. Datasets of imaged under vary-
ing lighting conditions, together with a corresponding
depth map, are commonly used in photometric stereo
research (Brenner et al., 2018). Brenner et al. cre-
ated a dataset of ancient roman coins, each illumi-
nated from 54 directions (Brenner et al., 2018). It is
believed that coin surface are similar to wall-reliefs in
that they are sufficiently modelled in 2.5D represen-
tations (Frisky et al., 2021b). Together with a depth
map created via photometric stereo, this Roman Coin
dataset can be used as ground truth for evaluating the
robustness of SIDP approaches with respect to light-
ing direction.
3 PROPOSED METHOD
In this work we propose a single image depth pre-
diction method that is robust against material color
and extreme lighting variations. Furthermore, a sin-
gle network that can extract both properties (robust
to color and light difference) with low computational
time is needed.
First, our work utilizes an improved version of the
previous cascaded network (Color-MCNet) (Frisky
et al., 2021c). Second, we add a new network robust
to lighting variations, called Light-MCNet. Then, a
feature joining mechanism to produce the final result.
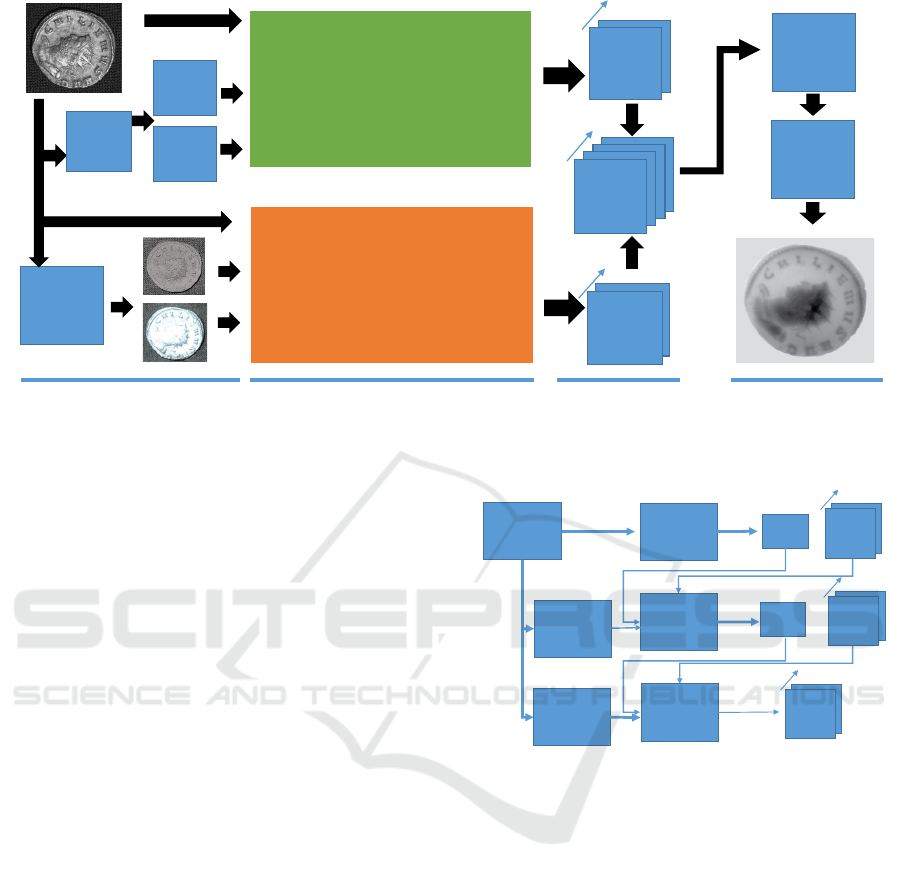
An overview of the proposed method (Color-Light-
MCNet) is given in Figure 1. In the following, the
building blocks of the approach are described in de-
tail.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
910
IID
Color Mul�-Cascade Network
Light Mul�-Cascade Network
5x5
conv
Upscaling
HSV
YCrCb
Convert
er
32
Color
feature
map
32
Light
feature
map
64
Joined
feature
map
Pre-processing
Feature extrac�on
Join process
Finaliza�on
Figure 1: Architecture of the proposed Color-Light-MCNet. IID is Intrinsic Image Decomposition. The numbered arrows
beside 32 and 64 indicate the dimensionality of the feature maps.
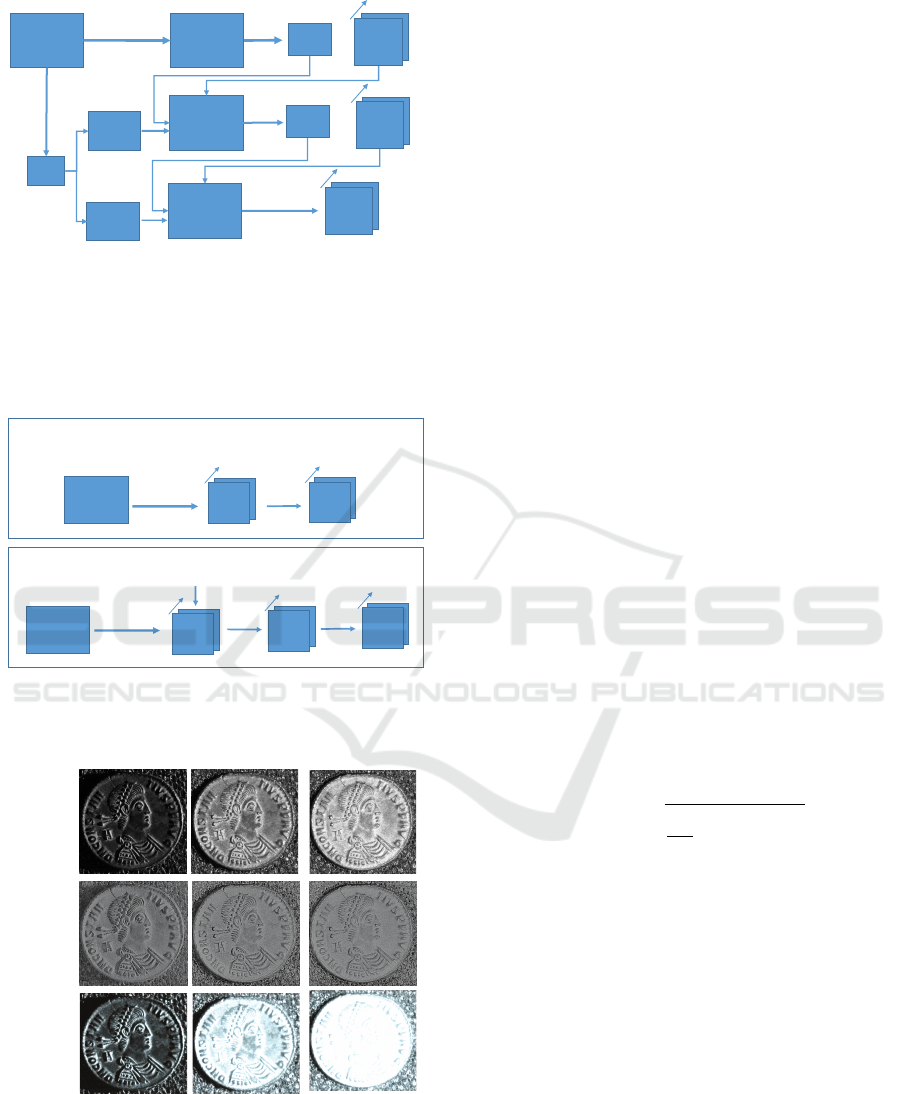
3.1 Color-MCNet
In the Color-MCNet section (see Figure 2, we use a
modified version of the MCCNet architecture from
Frisky et al. (Frisky et al., 2021c), which is designed
for SIDP robust to surface color variations and is re-
used in this work to obtain color robust features. The
input image is successively presented to the network
in RGB, YCrCb and HSV color spaces, where fea-
tures from each stage are concatenated with features
from the previous stage. Our networks make use of
the sub-architectures illustrated in Figure 4. In sub-
architecture 1a, we use a 9x9 convolution network, a
stride of 2 and 2x2 pooling. This configuration makes
the feature map size a quarter compared to the input
size, and a 3x3 convolution is applied afterwards. In
sub-architecture 2a, similar to 1a, we used a 9x9 con-
volution network, a stride of 2 and 2x2 pooling. In
sub-architecture 2b, the feature map of the previous
cascade level is concatenated to the current feature
map, and in 2c, similar to 1b, a 3x3 convolution is ap-
plied. The weight transfer in this network is applied
from sub-architecture 1a to 2a and sub-architecture 1b
to 2c. While the transferred feature maps in the orig-
inal architecture were 1-dimensional (Frisky et al.,
2021c), now a 32-dimensional feature map is trans-
ferred in order to allow more information to flow from
one stage of the cascade to the next.
3.2 Light-MCNet
In the Light-MCNet section (see Figure 3), we change
the input and parameters of Color-MCNet: the RGB
Sub
Architecture I
w
Architecture
II
Architecture
II
YCrCb
HSV
RGB
w
Wt
Wt
32
Feature
map
32
Feature
map
32
Feature
map
Sub
Sub
Figure 2: Three color-spaces (RGB,YCrCb,HSV) Color-
MCNet feature extraction. The input image is successively
presented to the cascaded network in different color spaces.
Feature maps and weights (w) are propagated to subsequent
cascade levels. Wt denotes the weight transfer process. Sub
Architectures 1 (initial feature map generation) and 2 (fea-
ture map generation with concatenation) are given in Fig-
ure 4.
image is decomposed using the unsupervised intrinsic
image decomposition by Letry et al. (Lettry et al.,
2018), in order to separate the lighting effects from
the original surface reflectance (see Figure 5 for an
example). In conjunction with the RGB image on the
first level, these two images become an input to the
network.
3.3 Color-Light-MCNet
The two architectures mentioned above, Color and
Light-MCNet, aim to solve their specific problems,
i.e., material color and extreme lighting problems, re-
Color-Light Multi Cascade Network for Single Image Depth Prediction on One Perspective Artifact Images
911
Architecture I
w
Architecture
II
Architecture
II
Reflectance
Shading
RGB
w
IID
32
Feature
map
32
Feature
map
Wt
Wt
32
Feature
map
Sub
Sub
Sub
Figure 3: Light-MCNet feature extraction. On the first cas-
cade level, the original RGB input image is presented to the
network. On the subsquent levels, reflectance and shading
components extracted by unsupervised intrinsic image de-
composition (Lettry et al., 2018) are used as inputs. The
rest of the network works analogous to the Color-MCNet
(Figure 2).
64
Feature
map
input
9x9 conv
2stride
2x2 pool
input
32
Feature
map
9x9 conv
2stride
2x2 pool
32
Feature
map
5x5 conv
32
Feature
map
concatenate
32
Feature
map
Sub Architecture 1
Sub Architecture 2
5x5 conv
a b
a
b
c
Figure 4: Sub architectures 1 and 2 that are used in Color-
MCNet and Light-MCNet.
RGB
Reflectance
Shading
13° 51° 71°
Figure 5: Example results of the intrinsic image decom-
position for different light elevation angles (Roman Coin
dataset).
spectively. However, a single architecture that can ad-
dress both problems simultaneously would be prefer-
able. Thus, we added a concatenation mechanism
on the output feature map in each architecture. The
integration aims to combine the color and light ro-
bust feature maps from the two previous architectures.
The combined features are passed to a 5x5 convolu-
tion into one feature dimension at the end of this net-
work. Finally, upscaling is carried out to return to
the original resolution. The architecture of the pro-
posed joint network is shown in Figure 1. The ar-
chitecture consists of four parts: pre-processing, fea-
ture extraction, join process, and finalization. In pre-
processing, conversion into different color-space is
performed for Color-MCNet, and Intrinsic image De-
composition (IID) is done for the Light-MCNet. In
the feature extraction part, color and light robust fea-
ture maps are extracted, which are subsequently com-
bined in the join process to a single feature map.
Lastly, the finalization part converts the feature map
into the final depth prediction.
4 EXPERIMENTS AND RESULTS
The performance of our architecture is individually
tested for robustness to color and lighting variations,
using the dedicated RRD Temple dataset and the
Roman Coin dataset, respectively. For evaluating
the performance in a mixed environment and com-
parison to state-of-the-art methods, the NYU Depth
V2 Dataset is used. Additionally to evaluating our
full network (Color-Light-MCNet), we also test the
performance of its components (Color-MCNet and
Light-MCNet) individually. As a primary error met-
ric, we use the Root Mean Square Error (RMSE):
RMSE =
s
1
|N|
N
∑
i=1
||y
i
− y
∗
i
||
2
(1)
where y
i
is groundtruth depth, y
∗
i
is predicted depth
and N is the number of test points.
4.1 Datasets
Two specialized datasets represent the two main chal-
lenges addressed in this paper: the RRD Temple
dataset represents different materials in a temple re-
lief, and the Roman Coin dataset represents different
lighting conditions in the image. Both RRD temple
and Roman coin datasets have a limited number of
samples. This condition motivates the creation of a
system that can perform well using a small number of
data. Additionally, in order to test the general applica-
bility of our approach and compare it with state of the
art, we also use the public NYU Depth V2 dataset.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
912

These three datasets are described in the following
subsections.
First dataset is The Registered Relief Depth
(RRD) Temple dataset, consists of two relief datasets
acquired at two Indonesian temples: Prambanan and
Borobudur. The RRD Temple Dataset is created by
Frisky et al. (Frisky et al., 2021c; Frisky et al., 2021a)
to accommodate the color difference problem created
by different materials appearing on archaeological re-
liefs and different color by chemical reaction. From
the 41 reliefs of the RRD Prambanan dataset, we
use 21 for training and 20 for testing. In the RRD
Borobudur dataset, 20 were used as training and 10 as
test sets. In total, we obtain 41 training examples and
31 test examples.
Second dataset is the Roman coin, consists of 23
coins, 11 of which are imaged from both sides and
12 from one side only, resulting in a total of 34 coin
sides. The dataset was originally created for photo-
metric stereo reconstruction, using a PhaseOne IQ260
Achromatic camera and a light dome with 54 indi-
vidually controlled LED light sources for illumina-
tion (Brenner et al., 2018).In the training phase, each
image is paired with its corresponding depth map.
From the 34 coin sides (each represented by 54 input
pairs), 26 are used for training and eight for testing.
All the grayscale images are converted into RGB be-
fore processing them in order to fit the network input.
The last dataset is the NYU Depth v2 that offers
images and depth maps for various indoor scenes (Sil-
berman et al., 2012). The dataset includes 120K train-
ing samples and 654 test samples, but we only use a
50K subset to train our network. This dataset is used
to compare our results to the current state-of-the-art
methods, as a majority of publications use it for eval-
uation.
4.1.1 Augmentation
In this work, we augment the training data of the three
datasets in several ways (Eigen and Fergus, 2015):
• Scaling: Input and target images are scaled by s ∈
[1, 1.5], and the depths are divided by s.
• Rotation: Input and target are rotated by r ∈
[−5, 5] degrees.
• Color: Input values are multiplied globally by a
random RGB value c ∈ [0.8, 1.2]
3
• Flips: Input and target are horizontally flipped
with 0.5 probability
4.2 Configuration
We test three different architectures: the individual
Color-MCNet and Light-MCNet and the combined
Color-Light-MCNet network. Both Color-MCNet
and Light-MCNet use three different inputs on a
three-level multi cascade network. As shown in Fig-
ures 2 and 3 both networks output 32 dimensional
feature maps. In order to obtain the final depth es-
timations, these feature maps are passed to an addi-
tional 5x5 convolution and upscaling network, anal-
ogous to the finalization stage of the Color-Light-
MCNet shown in Figure 1. For our experiments, we
train and test the Color-MCNet, Light-MCNet and
Color-Light-MCNet on all three datasets from scratch
for 100 epochs with a learning rate of 0.001. Addi-
tionally, AdaBins (Bhat et al., 2020) is trained and
tested on the RRD Temple dataset and the Roman
Coin dataset for reference; the performance of Ad-
aBins on the NYU Depth V2 Dataset is given by the
authors (Bhat et al., 2020).
4.3 Results
The three datasets used in this work represent dif-
ferent problems: the RRD Temple dataset represents
color problems, the Roman Coin dataset represents
lighting problems, and the NYU Depth V2 dataset
represents common indoor scenes and allows a com-
parison to state of the art. We thus evaluate our three
architectures on these three datasets in order to assess
their performance with respect to each of their spe-
cific problems. Results, including a comparison to
AdaBins, are shown in TABLE 1.
On the RRD Temple dataset, the Color-MCNet
performs better than the Light-MCNet. The differ-
ence in the material in the Prambanan temple and the
yellowing color in the Borobudur temple can be ap-
propriately resolved (see Figure 6). Compared to the
two networks, color-Light-MCNet outperformed all
implemented networks, including the AdaBins net-
work. In Figure 6, it can be seen that Color-MCNet
and Color-Light-MCNet perform well to different
materials in relief. On the other hand, Light-MCNet
produces low detail depth, and AdaBins results ex-
hibit erroneous depth differences caused by different
materials.
Regarding the performance on the Roman Coin
dataset, the Color-MCNet architecture cannot resolve
the influence of different lighting angles (see the sec-
ond row of Figure 7). Within the dataset, this method
performs most adequately with a 51
◦
light elevation
angle; this suggests that the Color-MCNet architec-
ture needs a specifics light condition for maximum
performance. For the Light-MCNet, we cannot ob-
serve significantly better results with respect to abso-
lute RMS errors; for the input images with 51
◦
ele-
vation angle, it performs even worse than the Color-
Color-Light Multi Cascade Network for Single Image Depth Prediction on One Perspective Artifact Images
913
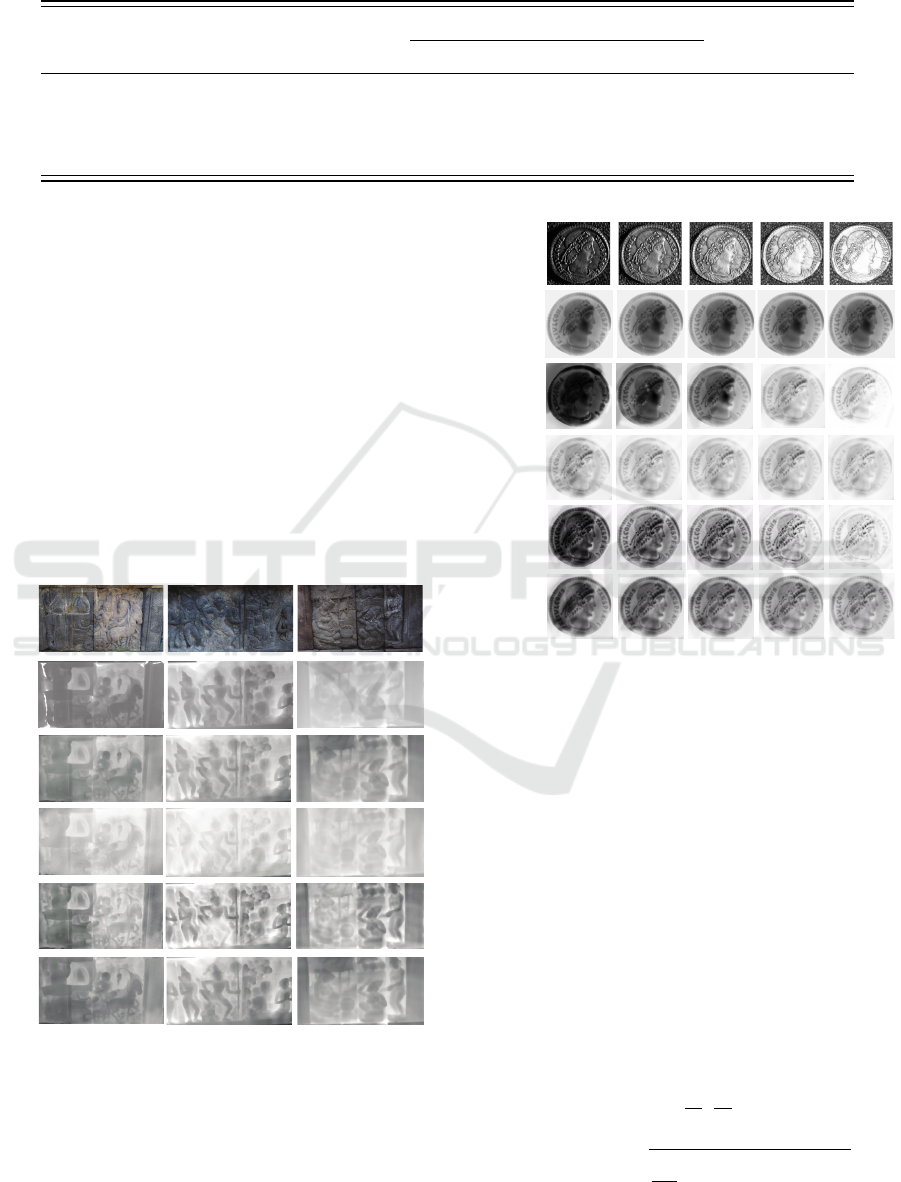
Table 1: Results of the proposed method on three databases (RMSE in mm, lower better). For the Roman Coin dataset, results
are grouped with respect to different light elevation angles.
RRD Temple Roman Coin NYU Depth V2
13
◦
32
◦
51
◦
71
◦
82
◦
Color-MCNet 2.53 3.22 1.70 1.06 1.24 1.18 0.557
Light-MCNet 4.43 1.34 1.28 1.25 1.21 1.18 0.720
Adabins (Bhat et al., 2020) 2.43 1.14 0.82 0.95 1.92 2.04 0.364
Color-Light MCNet 2.32 0.89 0.75 0.71 0.68 0.72 0.376
MCNet. However, the results of this architecture are
stable and are not impacted by different angles of in-
cident light. This can also be observed in Figure 7:
the architecture is robust to incident light direction,
but the results lack detail.
AdaBins performs similar to Color-MCNet, but it
produces better details on the results. The depth re-
sults of the Color-Light-MCNet are rich in detail and
robust to varying lighting conditions; even in extreme
light angles (13
◦
and 81
◦
, where the state of the arts
fails to produce consistent outputs (see the two bot-
tom rows of Figure 7 for example). Again, Color-
Light-MCNet outperforms the other tested methods
with respect to RMSE. Given the limited size of the
dataset, these results also suggest that our method is
especially useful in such situations.
(a)
(c)
(b)
(d)
(e)
(f)
Figure 6: Example results for the RRD Temple datasets. a:
RGB image (input), b: ground truth, c: Color-MCNet, d:
Light-MCNet, e: AdaBins, f: Color-Light-MCNet.
Using the NYU Depth V2 dataset, we test the per-
formance of our methods on a public dataset and com-
pare it to multiple states of the art methods. In Ta-
Input Data
Color-MCNet
Light MCNet
AdaBins
Color-Light
MCNet
13 32 51 71 82
° ° ° ° °
Ground truth
Figure 7: Results of the proposed method on the Roman
Coin datasets. Columns represent different elevation angles
of incident light. The first row shows the input images, the
subsequent rows show the results obtained from different
architectures.
ble 1, it can be seen that Color-MCNet and Light-
MCNet perform worst, while AdaBins and Color-
Light-MCNet show similar results. TABLE 2 shows a
comparison of Color-Light-MCNet to state of the art
methods on the NYU Depth V2 dataset using several
error metrics, such as RMSE (Equation 1), threshold
(Equation 2), RMSE log (Equation 3), and absolute
Relative Difference (abs.REL) (Equation 4). The state
of the art results given in TABLE 2 are taken from
available scoreboards (Bhat et al., 2020). It can be
observed that on the NYU Depth V2 dataset, our pro-
posed Color-Light-MCNet achieves competitive re-
sults with state of the art in all comparison metrics.
% o f y
i
s.t. max(
y
i
y
∗
i
,
y
∗
i
y
i
) = δ < thr (2)
RMSE log =
s
1
|N|
N
∑
i=1
||log y
i
− log y
∗
i
||
2
(3)
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
914

Table 2: Results of the proposed method on NYU Depth V2 compared with other state-of-the-art methods.
Higher better Lower better
δ < 1.25 δ < 1.25
2
δ < 1.25
3
RMSE linear RMSE log abs. REL
(Eigen and Fergus, 2015) 77.10% 95.00% 98.80% 0.639 0.215 0.158
(Frisky et al., 2021c) 79.40% 95.50% 99.10% 0.598 0.202 0.145
(Lee et al., 2018) 81.50% 96.30% 99.10% 0.572 0.193 0.139
(Lee and Kim, 2019) 83.70% 97.10% 99.40% 0.538 0.180 0.131
(Lee et al., 2019) 88.50% 97.80% 99.40% 0.392 0.142 0.110
Proposed 92.17% 98.70% 99.50% 0.376 0.098 0.108
(Wu et al., 2019) 93.20% 98.90% 99.70% 0.382 0.050 0.115
(Bhat et al., 2020) 90.30% 98.40% 99.70% 0.364 0.088 0.059
abs. REL =
1
N
N
∑
i=1
|y
i
− y
∗
i
|
y
i
(4)
5 CONCLUSION
In this work, the Color-Light-MCNet is proposed
as a new approach for SIDP, specifically addressing
depth mispredictions arising from variations in mate-
rial color and lighting direction. Evaluations are per-
formed with respect to three datasets: the robustness
of the method to color and light variations is tested
using the RRD Temple dataset and the Roan Coin
dataset, respectively, while a comparison with state
of the art in natural environments is performed using
the public NYU Depth V2 dataset.
Prior to the full Color-Light-MCNet, we test its
two main components individually: the Color-MCNet
designed to produce features robust to surface color
variations, and the Light-MCNet designed to pro-
duce features robust to lighting direction. The Color-
MCNet performs well in the RRD Temple dataset but
fails to resolve the influence of different lighting an-
gles appearing in the Roman coin dataset; the method
delivers acceptable results only for specific lighting
directions.
The Light-MCNet introduces intrinsic image de-
composition as a pre-processing step to separate the
input images’ lighting effects and surface reflectance.
Together with the original RGB image, the decom-
position results are presented as inputs to the cas-
cade network.This approach proved largely invariant
to lighting direction (Roman Coin dataset), but the re-
sults generally lack detail.
Finally, we combine the two feature maps ob-
tained from Color-MCNet and Light-MCNet into a
single stream to combine the strengths of both ap-
proaches in a single architecture. The resulting Color-
Light-MCNet shows superior results on both the RRD
Temple dataset and the Roman Coins dataset, where
the results exhibit rich details and robustness to varia-
tions in surface color and lighting direction, respec-
tively. For these datasets, our method clearly out-
performs AdaBins (Bhat et al., 2020), the current
state of the art SIDP method. The results make it
evident of the superior performance of our method
with small datasets. On the NYU Depth V2 dataset,
Color-Light-MCNet could not outperform AdaBins
but shows competitive performance with respect to
another state of the art methods. Most of the images
in this work were taken from a frontal view perspec-
tive of the artifact. In the future, more comprehensive
research in SIDP on non-frontal views is needed.
ACKNOWLEDGMENT
This work is funded by a collaboration scheme be-
tween the Ministry of Research and Technology of the
Republic of Indonesia and OeAD-GmbH within the
Indonesian-Austrian Scholarship Program (IASP).
This work is also supported by Type C grant from
Electronics Instrumentation Lab, Universitas Gadjah
Mada.
REFERENCES
Bhat, S. F., Alhashim, I., and Wonka, P. (2020). Ad-
abins: Depth estimation using adaptive bins. Arxiv,
abs/2011.14141.
Brenner, S., Zambanini, S., and Sablatnig, R. (2018). An
investigation of optimal light source setups for photo-
metric stereo reconstruction of historical coins. In Eu-
rographics Workshop on Graphics and Cultural Her-
itage.
Eigen, D. and Fergus, R. (2015). Predicting depth, surface
normals and semantic labels with a common multi-
scale convolutional architecture. In Proceedings of
Color-Light Multi Cascade Network for Single Image Depth Prediction on One Perspective Artifact Images
915

IEEE International Conference on Computer Vision
(ICCV), pages 2650–2658.
Frisky, A. Z. K., Fajri, A., Brenner, S., and Sablatnig, R.
(2020). Acquisition evaluation on outdoor scanning
for archaeological artifact digitalization. In Farinella,
G. M., Radeva, P., and Braz, J., editors, Proceedings
of the 15th International Joint Conference on Com-
puter Vision, Imaging and Computer Graphics The-
ory and Applications, VISIGRAPP 2020, Volume 5:
VISAPP, Valletta, Malta, February 27-29, 2020, pages
792–799. SCITEPRESS.
Frisky, A. Z. K., Harjoko, A., Awaludin, L., Dharmawan,
A., Augoestien, N. G., Candradewi, I., Hujja, R. M.,
Putranto, A., Hartono, T., Suhartono, Y., Zambanini,
S., and Sablatnig, R. (2021a). Registered relief depth
(rrd) borobudur dataset for single-frame depth predic-
tion on one-side artifacts. Data in Brief, 35:106853.
Frisky, A. Z. K., Harjoko, A., Awaludin, L., Zambanini,
S., and Sablatnig, R. (2021b). Investigation of single
image depth prediction under different lighting condi-
tions: A case study of ancient roman coins. J. Comput.
Cult. Herit., 14(4).
Frisky, A. Z. K., Putranto, A., Zambanini, S., and Sablat-
nig, R. (2021c). Mccnet: Multi-color cascade net-
work with weight transfer for single image depth pre-
diction on outdoor relief images. In Del Bimbo, A.,
Cucchiara, R., Sclaroff, S., Farinella, G. M., Mei, T.,
Bertini, M., Escalante, H. J., and Vezzani, R., editors,
Pattern Recognition. ICPR International Workshops
and Challenges, pages 263–278, Cham. Springer In-
ternational Publishing.
Georgopoulos, A., Ioannidis, C., and Valanis, A. (2010).
Assessing the performance of a structured light scan-
ner. International Archives of Photogrammetry,
Remote Sensing and Spatial Information Sciences,
XXXVIII:250–255.
Lee, J., Heo, M., Kim, K., and Kim, C. (2018). Single-
image depth estimation based on fourier domain anal-
ysis. In 2018 IEEE/CVF Conference on Computer Vi-
sion and Pattern Recognition, pages 330–339.
Lee, J. H., Han, M.-K., Ko, D. W., and Suh, I. H. (2019).
From big to small: Multi-scale local planar guid-
ance for monocular depth estimation. arXiv preprint
arXiv:1907.10326.
Lee, J.-H. and Kim, C.-S. (2019). Monocular depth esti-
mation using relative depth maps. In The IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 9729–9738.
Lettry, L., Vanhoey, K., and Van Gool, L. (2018). Unsu-
pervised Deep Single-Image Intrinsic Decomposition
using Illumination-Varying Image Sequences. Com-
puter Graphics Forum, 37(10):409–419.
Ming, Y., Meng, X., Fan, C., and Yu, H. (2021). Deep
learning for monocular depth estimation: A review.
Neurocomputing, 438:14–33.
Oswald, M. R., T
¨
oppe, E., and Cremers, D. (2012). Fast and
globally optimal single view reconstruction of curved
objects. In 2012 IEEE Conference on Computer Vi-
sion and Pattern Recognition, pages 534–541.
Pan, J., Li, L., Yamaguchi, H., Hasegawa, K., Thufail, F. I.,
Mantara, B., and Tanaka, S. (2018). 3D Reconstruc-
tion and Transparent Visualization of Indonesian Cul-
tural Heritage from a Single Image. In Eurographics
Workshop on Graphics and Cultural Heritage, pages
207–210. The Eurographics Association.
Pollefeys, M., Van Gool, L., Vergauwen, M., Cornelis, K.,
Verbiest, F., and Tops, J. (2001). Image-based 3d ac-
quisition of archaeological heritage and applications.
In VAST 01: Proceedings of the 2001 conference on
Virtual Reality, Archeology, and Cultural Heritage,
pages 255–262.
Ruo Zhang, Ping-Sing Tsai, Cryer, J. E., and Shah, M.
(1999). Shape-from-shading: a survey. IEEE Trans-
actions on Pattern Analysis and Machine Intelligence,
21(8):690–706.
Saxena, A., Sun, M., and Ng, A. Y. (2009). Make3d: Learn-
ing 3d scene structure from a single still image. IEEE
Transactions on Pattern Analysis and Machine Intel-
ligence, 31(5):824–840.
Silberman, N., Hoiem, D., Kohli, P., and Fergus, R. (2012).
Indoor segmentation and support inference from rgbd
images. In Fitzgibbon, A., Lazebnik, S., Perona, P.,
Sato, Y., and Schmid, C., editors, ECCV 2012, pages
746–760, Berlin, Heidelberg. Springer Berlin Heidel-
berg.
Song, M., Lim, S., and Kim, W. (2021). Monocular depth
estimation using laplacian pyramid-based depth resid-
uals. IEEE Transactions on Circuits and Systems for
Video Technology, pages 1–1.
Wu, Y., Boominathan, V., Chen, H., Sankaranarayanan, A.,
and Veeraraghavan, A. (2019). Phasecam3d — learn-
ing phase masks for passive single view depth esti-
mation. In 2019 IEEE International Conference on
Computational Photography (ICCP), pages 1–12.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
916
