The MIS Check-Dam Dataset for Object Detection and Instance
Segmentation Tasks
Chintan Tundia
a,∗
, Rajiv Kumar
b,∗
, Om Damani
c
and G. Sivakumar
d
Indian Institute of Technology Bombay, Mumbai, India
Keywords:
Object Detection, Instance Segmentation, Remote Sensing, Image Transformers.
Abstract:
Deep learning has led to many recent advances in object detection and instance segmentation, among other
computer vision tasks. These advancements have led to wide application of deep learning based methods
and related methodologies in object detection tasks for satellite imagery. In this paper, we introduce MIS
Check-Dam, a new dataset of check-dams from satellite imagery for building an automated system for the
detection and mapping of check-dams, focusing on the importance of irrigation structures used for agriculture.
We review some of the most recent object detection and instance segmentation methods and assess their
performance on our new dataset. We evaluate several single stage, two-stage and attention based methods
under various network configurations and backbone architectures. The dataset and the pre-trained models are
available at https://www.cse.iitb.ac.in/gramdrishti/.
1 INTRODUCTION
Machine learning and deep learning have evolved ex-
ponentially over the past decade contributing a lot to
the fields of image and video processing (Jiao and
Zhao, 2019), computer vision (Kumar et al., 2021),
natural language processing (Fedus et al., 2021), re-
inforcement learning (Henderson et al., 2018) and
more. Understanding a scene involves detecting and
identifying objects (object detection) or keypoints and
different regions in images (instance and semantic
segmentation). With the improvements in imaging
technologies of the satellite sensors, large volumes
of hyper-spectral and spatial resolution data are avail-
able, resulting in the application of object detection
in remote sensing for identifying objects from satel-
lite, aerial and SAR imagery. The availability of very
large remote sensing datasets (Li et al., 2020a) have
led to applications like land monitoring, target iden-
tification, change detection, building detection, road
detection, vehicle detection, and so on.
With the increased spatial resolution, more objects
are visible in satellite images, while been subjected
to viewpoint variation, occlusion, background clut-
a
https://orcid.org/0000-0003-3169-1775
b
https://orcid.org/0000-0003-4174-8587
c
https://orcid.org/0000-0002-4043-9806
d
https://orcid.org/0000-0003-2890-6421
∗
Authors a,b made equal contribution
ter, illumination, shadow, etc. This leads to various
challenges in addition to the common object detec-
tion challenges like small spatial extent of foreground
target objects, large scale search space, variety of per-
spectives and viewpoints, etc. The objects in remote
sensing images are also subject to rotation, intra-class
variations, similarity to surroundings, etc. making ob-
ject detection on remote sensing images a challenging
task.
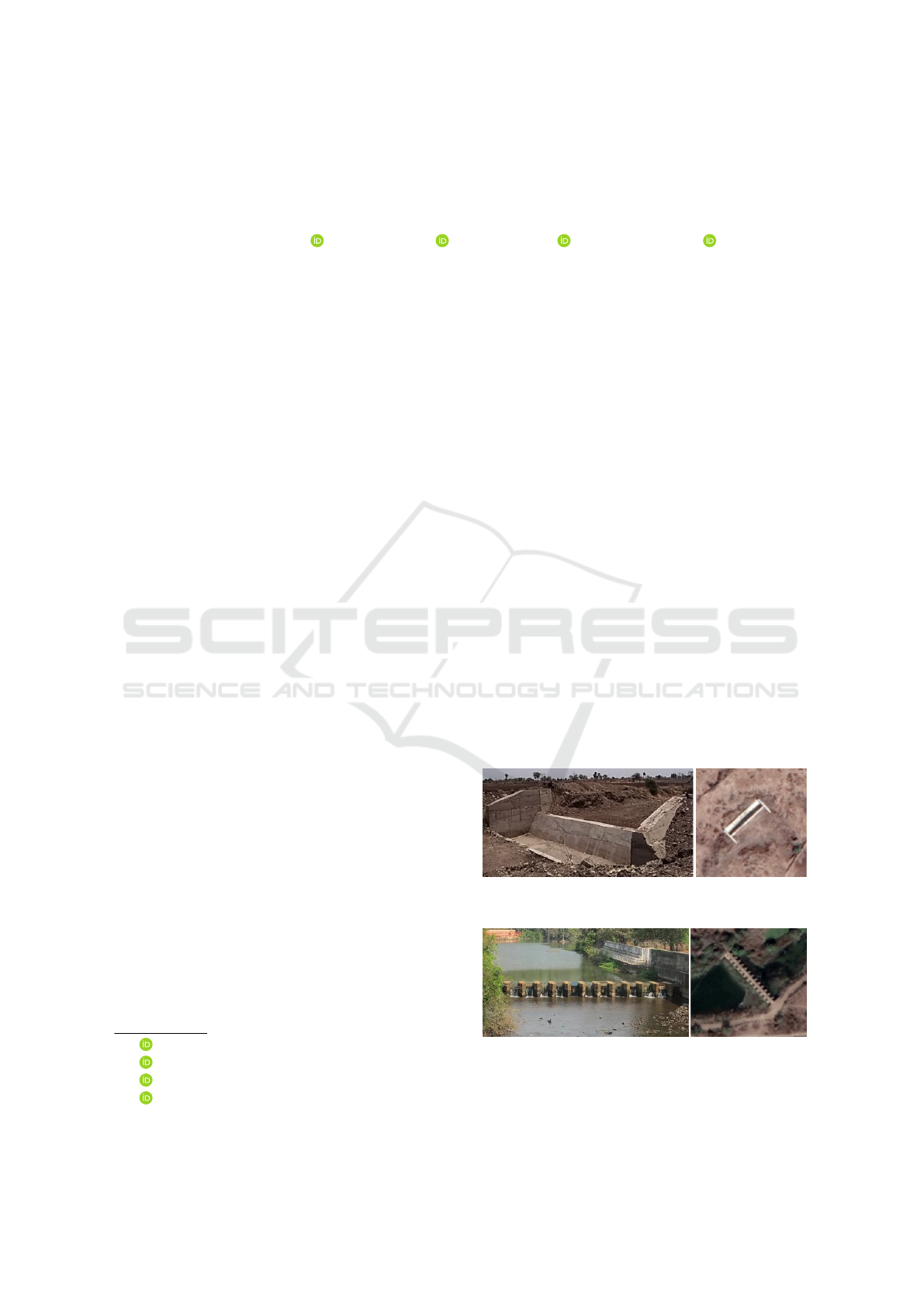
Figure 1: Photograph (left) and satellite image (right) of a
wall based check-dam.
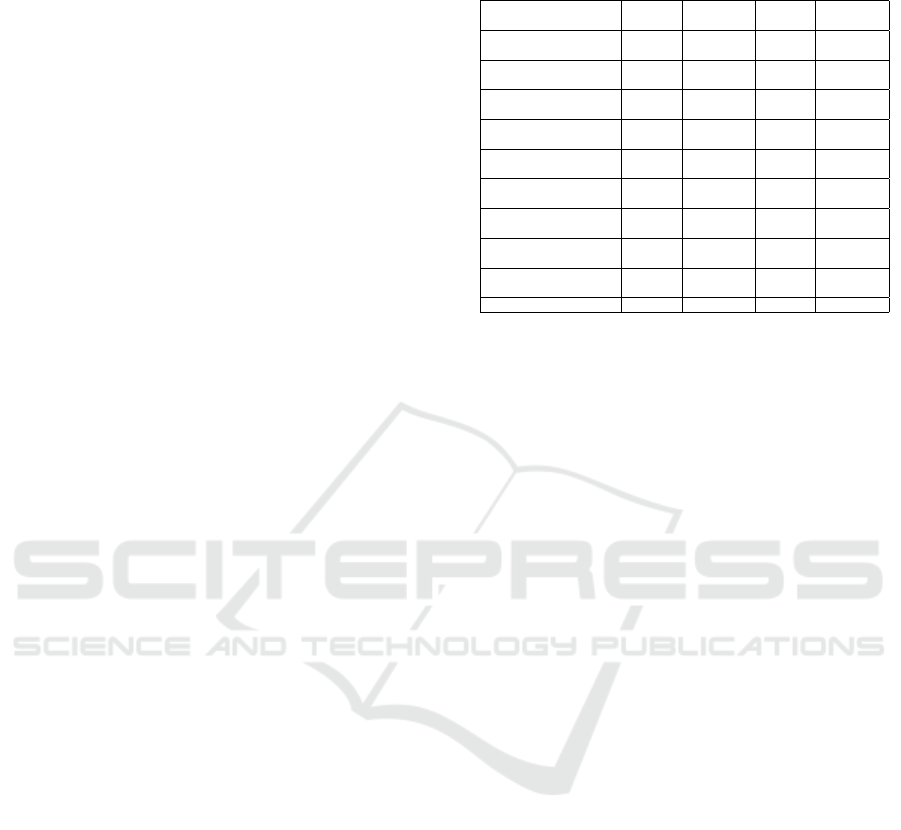
Figure 2: Photograph (left) and satellite image (right) of a
gate based check-dam.
In general, images from satellites have small,
densely clustered objects of interest with a small spa-
Tundia, C., Kumar, R., Damani, O. and Sivakumar, G.
The MIS Check-Dam Dataset for Object Detection and Instance Segmentation Tasks.
DOI: 10.5220/0010799600003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 5: VISAPP, pages
323-330
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
323

tial extent, unlike that of COCO (Lin et al., 2014) or
Imagenet (Russakovsky et al., 2015) with large and
less clustered objects. For e.g. In satellite images, ob-
jects like cars will be a few tens of pixels in extent
even at the highest resolution. In addition, the object
images captured from above can have different orien-
tations. i.e. objects classes like planes, vehicles, etc.
can be oriented between 0 and 360 degrees, whereas
object classes in COCO or Imagenet data are mostly
vertical.
Recent works (Tundia et al., 2020) have focused
and attended to identifying man-made agricultural
and irrigation structures used for farming. Check-
dams (See Fig.1 and Fig.2) are artificial irrigation
structures built across water bodies to provide irriga-
tion to nearby and surrounding places. They have a
cultivable command area of up to 2000 hectares. Mi-
nor irrigation census is conducted for purposes of ru-
ral planning, formulating various policies and in re-
serving and allocating funds for agricultural develop-
ment. However, maintaining a record of the minor
irrigation structures makes irrigation census a time-
consuming, expensive and laborious task, which is
prone to errors. In the light of this, we introduce a
new dataset of check-dams from satellite images for
building an automated system for detection and map-
ping of check-dams to ease the process of census. Our
work will complement existing object detection tech-
niques on agricultural structures (Tundia et al., 2020)
like farm ponds and wells. In this paper, we primarily
focus on deep learning based object detection and in-
stance segmentation methods and benchmark the lat-
est methods in computer vision. Our contribution in
this paper is two-fold :
1. Minor Irrigation Structures Check-Dam Dataset:
a public dataset annotated by domain experts us-
ing images from Google static map APIs (Google
Static Maps, 2021) for instance segmentation and
object detection tasks.
2. A benchmark and assessment of the performance
of various object detection and instance segmen-
tation methods on the check-dam dataset.
The paper is structured as follows: section 2 covers
the related work with an overview of the object de-
tection and instance segmentation methods, section 3
covers the details of the proposed dataset, section 4
covers the evaluation criteria, architecture and train-
ing details, section 5 covers the experiments, results,
observation and analysis, and finally conclusion in
section 6.
2 RELATED WORK
Deep learning with convolutional layers has led to
learning of high-level feature representations of im-
ages, followed by the trend of overlapping detectors
and proposal generators leading to powerful object
detectors. On the other hand, instance segmentation
gives a finer inference for every pixel of the object in
the input image, labelled using the segmentation la-
bels.
2.1 Object Detection Methods
In general, object detection based methods are either
based on region proposals or regression. Object pro-
posals refer to the candidate boxes that possibly con-
tain objects and are used to detect objects of multiple
aspect ratios while avoiding sliding window searches.
In two stage models, the first stage generates object
proposals, followed by the refinement of these bound-
ing boxes in the subsequent stages. In single stage
models, the whole detection pipeline is performed in
a single step, formulated as dense classification, gen-
erally optimized by a focal loss and localization of the
object as bounding box regression. These regression
based methods do not produce candidate region pro-
posals or use any feature re-sampling methods, which
lead to more efficient models. In bounding box re-
gression, the location of a predicted bounding box
is refined based on the anchor box and has been in-
tegrated into the detector while training. Deep re-
gression applies deep learning to directly regress the
bounding box coordinates based on deep learning fea-
tures, but it is prone to difficulties in the localization
of small objects. In this section, we briefly mention
some of the object detection methods and summarize
the important changes that each method introduced.
Many of these object detection methods also double
as instance segmentation methods.
RCNN (Girshick et al., 2014) extracts a set of ob-
ject proposals by a selective search on a given im-
age, and then the region proposals are re-scaled and
fed to a backbone to extract features. These features
are then used by SVM classifiers to predict and rec-
ognize the object categories within a region. Fast
RCNN (Girshick, 2015) simultaneously trains a de-
tector and performs bounding box regression, lead-
ing to detection speeds over 200 times faster than the
RCNN. However, most of its computational time and
resources get expended in computing the fully con-
nected layers. Later, faster region based CNN (Faster
RCNN) (Ren et al., 2015) introduces Region Proposal
Method (RPN) and a detector that runs detection only
on the network’s top layer to further improve the in-
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
324

ference speed.
YOLO (Redmon et al., 2016) introduces the single
stage detection paradigm without using proposal de-
tection and verification. Though YOLO is extremely
fast, it lacks the localization accuracy in compari-
son to two-stage object detection methods as well
as the performance on small objects. SSD (Liu
et al., 2016) focuses on YOLO’s issues by focusing
on different layers of the network rather than just
the topmost layer. YOLOv2 (Redmon and Farhadi,
2017) improves the detection of small objects over
YOLO by using larger input sizes. YOLOv3 (Red-
mon and Farhadi, 2018) improves on the various met-
rics over YOLOv2 (Redmon and Farhadi, 2017) and
improves on the real-time inference and execution
time. RetinaNet (Lin et al., 2017) solves the issue of
foreground-background class imbalance during train-
ing of dense one-stage detectors, by reshaping the
cross entropy loss to focus on hard examples and
down-weighing the loss assigned to well classified ex-
amples.
A few of the single-stage methods alleviate the
anchor box imbalance between positive and nega-
tive anchor boxes by treating bounding boxes as
keypoints pair. Cornernet (Law and Deng, 2018),
a keypoint based one-stage detector eliminates the
need for designing anchor boxes by using corner
pooling to improve the corner localization. Cas-
cadeRPN (Vu et al., 2019) improves the quality of
region-proposals by relying on single anchor per lo-
cation and refines it in multiple stages, where each
stage progressively defines positive samples by start-
ing with anchor-free metric followed by anchor-based
metrics. Free Anchor (Zhang et al., 2019) focuses
on the idea of allowing objects to match the an-
chors flexibly and optimizes the detection customized
likelihood. Fully Convolutional One Stage (FCOS)
object detector (Tian et al., 2019), an anchor-free,
proposal-free method approaches object detection in
a per-pixel fashion, with only NMS post-processing
step. Empirical Attention (Zhu et al., 2019) com-
pares spatial attention elements from Transformer at-
tention, dynamic convolution and deformable convo-
lution in a generalized attention formulation. Cen-
tripetalNet (Dong et al., 2020) improves the corner
point matching by using centripetal shift and by de-
signing cross-star deformable convolution. Detec-
toRS (Qiao et al., 2020) combines Recursive Fea-
ture Pyramid (RFP) and Switchable Atrous Convolu-
tion (SAC) to achieve SoTA object detection perfor-
mance. RFP incorporates feedback connections into
the bottom-up backbone layers from the feature pyra-
mid networks (FPN), while SAC uses the different
atrous gates to convolve the features and uses switch
functions to gather the results.
SparseRCNN (Sun et al., 2020) reduces the num-
ber of hand-designed object candidates from thou-
sands to a few hundred learnable proposals and pre-
dicts the final output directly without NMS post-
processing. Dynamic RCNN (Zhang et al., 2020) pro-
poses a dynamic design to alleviate the inconsistency
problem between the fixed network and dynamic
training procedures by adjusting the IoU threshold
and the shape of regression loss function, based on
the training statistics of the object proposals. GFL (Li
et al., 2020b) designs a joint representation of local-
ization quality and classification to eliminate the in-
consistency risk and depicts the flexible distribution in
real data, by merging the quality estimation into class
prediction vector. The resulting labels are continuous,
which are optimized using a generalized focal loss.
Deformable DETR (Zhu et al., 2020) mitigates the is-
sues of DETR by attending to key sampling points
around a reference to overcome slow convergence and
the limitations of feature spatial resolution.
2.2 Instance Segmentation Methods
In this section, we briefly mention some of the in-
stance segmentation methods and summarize the im-
portant changes in each method. All these instance
segmentation methods can also perform object detec-
tion under the same pipeline.
Cascade RCNN (Cai and Vasconcelos, 2019) uses
a sequence of detectors that are trained sequentially
using the output of a detector as the training set for the
next detector. In cascaded detection, a coarse to fine
technique is used, improving localization accuracy for
small objects. Instaboost (Fang et al., 2019), a data
augmentation technique, explores feasible locations
where objects could be placed based on the similarity
of local appearances and proposes a location proba-
bility map. Hybrid Task Cascade (Chen et al., 2019a)
introduces a framework for joint multi-stage process-
ing of both detection and segmentation pipelines by
progressively learning discriminative features by in-
tegrating complementary features.
YOLACT (Bolya et al., 2019) performs real-
time instance segmentation by having two parallel
pipelines, where one generates a set of prototype
masks, while the other predicts the coefficients of
masks per-instance. General ROI Extraction (Rossi
et al., 2020) introduces non-local building blocks and
attention mechanisms to attend to multiple layers of
FPN, to extract a coherent subset of features for in-
tegrating in two stage methods. Prime Sample At-
tention (PISA) in object detection (Cao et al., 2020)
assesses how different samples from the dataset con-
The MIS Check-Dam Dataset for Object Detection and Instance Segmentation Tasks
325
tribute to the overall performance in mean AP. Swin
Transformer (Liu et al., 2021) presents a hierarchical
architecture that uses shifted windows for computing
representations by limiting self-attention computation
to non-overlapping local windows, while also permit-
ting cross-window connections.
3 PROPOSED DATASET
Here, we introduce and give the details of our dataset
of satellite images on check-dams, an irrigation struc-
ture constructed for agricultural needs. Our dataset
has images comparable in image dimensions to that
of Imagenet and COCO, instead of commonly used
single-view remote sensing image with dimensions in
the range of tens of thousands of pixels. Our dataset
falls in the category of small-scale optical satellite
image dataset, whose ground truth instance level an-
notations are not easily available. Our dataset com-
plements minor irrigation structures dataset (Tundia
et al., 2020) for wells and farm ponds, by adding
a new category in man-made irrigation structures.
While most datasets are designed keeping only one
task in mind, our dataset is designed with annotations
for both object detection and instance segmentation
tasks. To ensure geographical diversity in the dataset,
we collected images from 36 districts of Maharashtra,
India, based on the availability of ground-truth data.
Related Datasets. There are several datasets in re-
mote sensing that use images from multiple sources
like airplane, drone (aerial images), satellites (op-
tical, multispectral, hyperspectral, etc.). Some of
these datasets focus on objects like buildings, ve-
hicles, cars, ships, etc., while some have classes
like pools, playgrounds, vehicles of different types,
etc. While some datasets have very high resolu-
tion images, some datasets have images ranging from
10 (Maggiori et al., 2017) to a few tens of thousands.
Datasets also vary in terms of the number of instances
from 600 (Maggiori et al., 2017) to around 1/5 of a
million (Li et al., 2020a). A comparison of the related
datasets in terms of the number of classes, number of
instances, number of images and the image sizes are
given in the Table 1.
Scale: Contrasting the datasets (Li et al., 2020a) that
have large class imbalance, we have 562 instances
of wall-based check-dam and 520 instances of gate-
based check-dam. While other datasets have rela-
tively abundant and dense object instances that are
easy to capture, our dataset has instances that are ge-
ographically far apart from each other and require an-
notations from the domain experts. In comparison to
dense object datasets (e.g. cars in aerial images), our
Table 1: Optical satellite image datasets for object detec-
tion.
Dataset #Classes #Instances #Images
Image Size
(pixels)
RSOD
(Long et al., 2017)
4 6,950 976 ∼1000
CARPPK
(Hsieh et al., 2017)
1 89,777 1448 1280
ITCVD
(Yang, 2018)
1 228 23,543 5616
LEVIR
(Chen and Shi, 2020)
3 11,000 22,000 600-800
SpaceNet MVOI
(Weir et al., 2019)
1 126,747 60,000 900
DIOR
(Li et al., 2020a)
20 90,228 23,463 800
RarePlanes
(Shermeyer et al., 2020)
1 644,258 50,253 1080
Well
(Tundia et al., 2020)
1 1614 1,011 640
Farmpond
(Tundia et al., 2020)
4 715 1,018 640
MIS Check-Dam 2 1082 1,037 640
dataset has images consisting of sparsely located ob-
jects. The object instances in our dataset come from
two categories. Our dataset has 1082 instances of
check-dams across 1037 images on images of 640 x
640 pixel dimensions. Our dataset also has images
with visually similar objects to check-dams like build-
ings, huts, etc. that makes the object detection and in-
stance segmentation task difficult. In terms of spatial
resolution, Google maps API uses zoom levels rang-
ing from 1 to 22 that correspond to the image spa-
tial resolution. However, most objects of interest are
identifiable to humans at zoom levels of 17, 18 and
19 with resolutions of 1.262, 0.315 and 0.078 respec-
tively. While a heavy traffic image can have up to hun-
dreds of instances, only 8-10 farm ponds and wells are
visible at zoom level 18, and upto four check-dams
are visible at zoom level 18.
Size Variations: Check-dams are subject to size vari-
ations due to their surrounding environments. Unlike
other dataset classes, our dataset has instances with
large intra-class diversity and high inter-class similar-
ity. Since a check-dam is built across a river or wa-
ter body, it is easy for a human with domain knowl-
edge to identify the structure and distinguish between
a check-dam or a bridge. However, the width of a wa-
ter body varies along it’s trajectory giving rise to large
variations in check-dam sizes in comparison to ob-
jects like cars or planes in other datasets, which may
have a standard shape and size.
Image Variations: The satellite images collected
from Google maps span seasons and collection times.
The imaging conditions also vary due to the presence
of air pollution, clouds, weather conditions and image
sensor types, which leads to blurry images or image
tinting. Moreover, there are wide variations in the sur-
rounding vegetation even under a small geographical
region. Unlike nadir (overhead) satellite imagery, off-
nadir imagery captures different perspectives of the
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
326

same object. An object captured from one angle may
cast the shadow and appear differently based on the
time of image capture. Also, the presence of trees and
surrounding vegetation may occlude the check-dam.
Moreover, a check-dam and its surrounding appear-
ances vary depending upon the water level, seasonal
rains and the irrigation purposes and uses.
4 IMPLEMENTATION DETAILS
4.1 Evaluation Criteria
The two main metrics used for object detection
and instance segmentation tasks are PascalVOC met-
ric (Everingham et al., 2012) and COCO metric (Lin
et al., 2014). These metrics rely on Intersection
Over Union (IOU) given by the overlapping area be-
tween the predicted bounding box and the ground
truth bounding box, divided by the area common be-
tween them.
PascalVOC metric takes the average precision at a
fixed IoU of 0.5, whereas COCO metric measures the
average over multiple IoU thresholds. For multi-class
detectors, final mAP (AP@[0.5:0.95]) is computed by
taking the mean over 10 IoU levels (starting from 0.5
to 0.95 with a step size of 0.05) on each class. We base
all our experiments on COCO metric, since COCO
metric provides metrics at different IOU thresholds.
4.2 Architecture and Training Details
For training our dataset, we made a train-test split of
80-20, which consists of 450 wall-based check-dam
instances and 418 gate-based check-dam instances in
the training set and 110 wall-based check-dam in-
stances and 103 gate-based check-dam instances in
the test set. The details of architecture and back-
bone used in some of the methods are given in Ta-
ble 3. The specific details of the method, the model,
and the backbone used for training are given in Ta-
ble 2 and Table 4. We used MMDetection (Chen
et al., 2019b) framework for implementing the vari-
ous methods in our benchmark. We used ResNet 50,
ResNet 101, ResNext 101, HourglassNet, DetectoRS-
R50 pretrained backbones in object detection experi-
ments and Resnet-50, Resnet-101, and Swin Trans-
former pretrained backbones in instance segmentation
experiments. We used pretrained backbones primar-
ily trained on Imagenet, COCO, and cityscapes for
training different models.
5 EXPERIMENTS AND RESULTS
Localization Distillation: The network size and the
number of parameters are crucial for network infer-
ence speeds. Network distillation compresses the
knowledge from a teacher network to a smaller stu-
dent network, by overcoming the limitation of dis-
tilling only localization information, for arbitrary
teacher and student architectures. While network
pruning reduces the network sizes by removing the
unimportant weights, this cannot be applied directly
to object detection methods, as it may result in sparse
connectivity patterns in a CNN. We experiment to
see whether knowledge distillation is possible with
localization distillation (Zheng et al., 2021). We
used three different settings based on GFL (Li et al.,
2020b), training a teacher with a pretrained back-
bone of ResNet-101 and a student with different back-
bone settings of ResNet-18, ResNet-34 and ResNet-
50. The details of the teacher-student backbone and
the results of the knowledge distillation on object de-
tection task are given in Table 5. We can observe from
Table 5 that the bbox mAP (0.50) of 0.966 is close to
0.967 of DetectoRS (Qiao et al., 2020) given in Ta-
ble 4. Also, performing the localization distillation
on the same model as the teacher can further improve
the performance of the model.
5.1 Results
The quantitative results of comparison of various ob-
ject detection methods are given in Table 4 and the
results of comparison of various instance segmenta-
tion methods are given in Table 2. The results of
training a Faster-RCNN model from scratch is given
in the topmost row of Table 4 while the remain-
ing table rows compare the performance of methods
trained using pre-trained backbone. We observe that
the model trained from scratch has performed poorly
even after training for more than a hundred epochs,
while the metric scores have improved only grad-
ually. We observe that using pre-trained backbone
not only improves the convergence speed, but also
helps to achieve the best possible performance from
a method. We observe that DetectoRS has the high-
est values of 0.625 in mAP (0.50:0.95), 0.967 in mAP
(0.5) and 0.749 in mAP (0.75) for the object detec-
tion task. We attribute the performance of DetectoRS
to hybrid task cascade along with recursive feature
pyramid and switchable atrous convolution. Though
RFP and SAC can be independently applied, the best
performance is observed when both are applied. For
the instance segmentation task, both Swin transformer
and HTC records the highest values of 0.478 in mAP
The MIS Check-Dam Dataset for Object Detection and Instance Segmentation Tasks
327
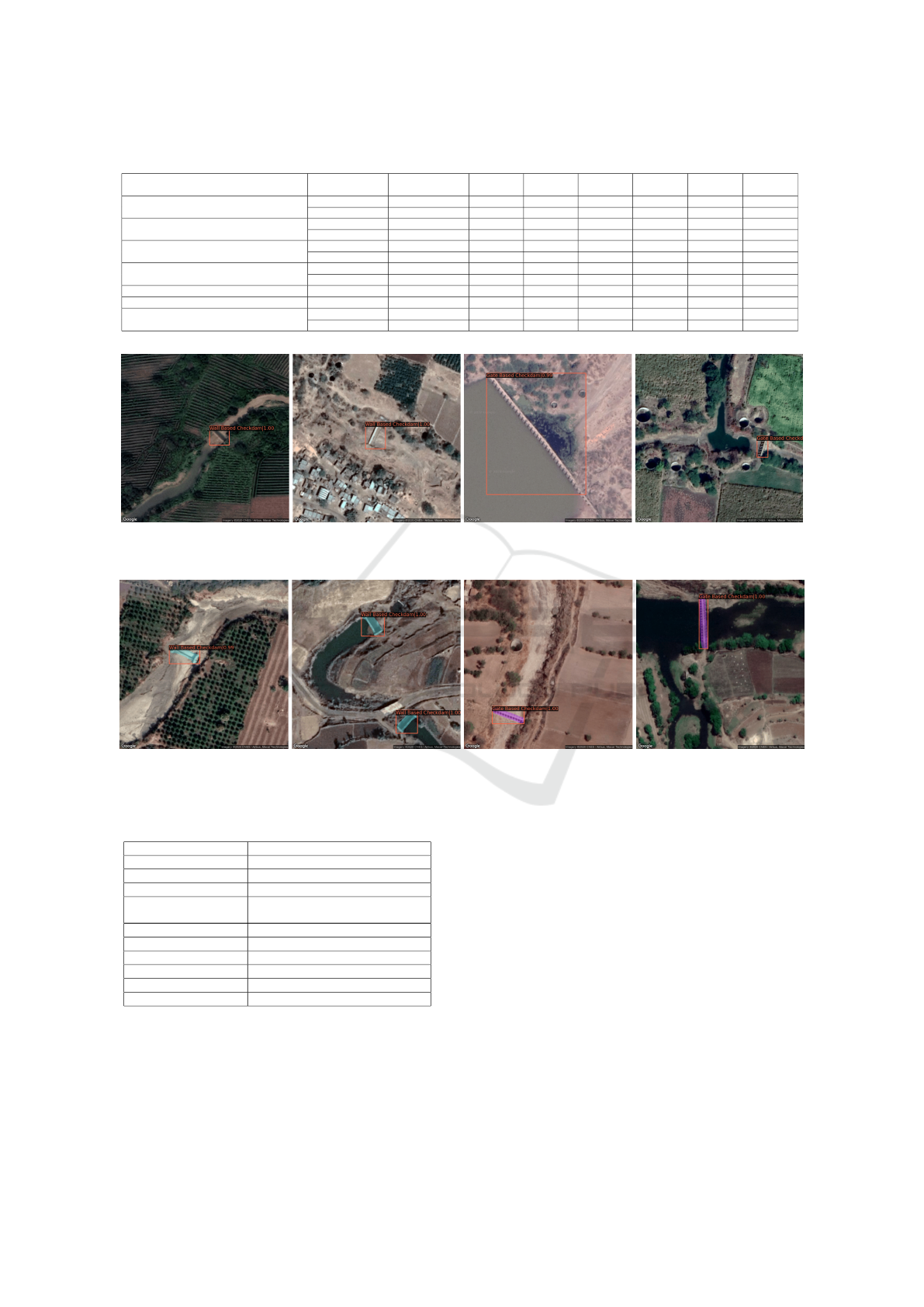
Table 2: Comparison of the performance of various instance segmentation methods on checkdam dataset.
Method Model Name Backbone
bbox mAP
(0.50:0.95)
bbox mAP
(0.50)
bbox mAP
(0.75)
segm mAP
(0.50:0.95)
segm mAP
(0.50)
segm mAP
(0.75)
Hybrid Task Cascade (Chen et al., 2019a)
HTC R-50 0.605 0.940 0.705 0.478 0.918 0.472
HTC R-101 0.599 0.936 0.705 0.474 0.905 0.446
YOLACT (Bolya et al., 2019)
YOLACT R-50 0.539 0.966 0.542 0.458 0.939 0.409
YOLACT R-101 0.545 0.940 0.574 0.435 0.908 0.377
Instaboost (Fang et al., 2019)
Cascade MRCNN R-50 0.613 0.933 0.722 0.477 0.915 0.451
Cascade MRCNN R-101 0.607 0.942 0.707 0.457 0.898 0.444
Cascade RCNN (Cai and Vasconcelos, 2019)
Cascade MRCNN
R-50 0.601 0.932 0.692 0.466 0.902 0.449
Cascade MRCNN
R-101 0.567 0.933 0.638 0.460 0.893 0.423
General ROI Extraction (Rossi et al., 2020) MRCNN R-50 0.587 0.950 0.697 0.472 0.908 0.441
Prime Sample Attention (Cao et al., 2020) MRCNN R-50 0.603 0.941 0.703 0.477 0.914 0.477
Swin Transformer (Liu et al., 2021)
MRCNN (FP-16)
Swin Transformer
0.603 0.971 0.699 0.465 0.921 0.451
MRCNN
Swin Transformer
0.617 0.978 0.697 0.478 0.920 0.464
Figure 3: Object Detection results on the test data. (From left to right) a, b: Wall based check-dams detected among vegetation
and dry surroundings; c,d: Detection on large size varieties of gate based check-dams.
Figure 4: Instance segmentation results on the test data. (From left to right) a, b: Wall based check-dams segmented in dry
stream and wet stream surroundings; c, d: Gate based check-dams segmented in dry stream and wet stream.
Table 3: Summary of the different architectures used in the
comparison study.
Method Architecture Details
YOLOv3 Darknet
CornerNet
Stacked Hourglass, Corner pooling
Centripetal Net
Stacked Hourglass, Corner pooling
Empirical Attention
Deformable Convolution(DCN),
Spatial Attention(1111, 0010)
FCOS
Group Normalization(GN), DCN
Generalized Focal Loss
Generalized Focal Loss, DCNv2
General ROI Extraction
Non-local building block + Attention
Prime Sample Attention
PISA, ROI Pool
Hybrid Task Cascade
DCN, Multiscale Training
DetectoRS
RFP, SAC
(0.50:0.95), while YOLACT records the highest of
0.939 in mAP (0.5) and PISA records the highest of
0.477 in mAP (0.75).
The qualitative results of object detection by De-
tectoRS on our dataset are given in Fig. 3, while the
qualitative results of instance segmentation using Hy-
brid Task Cascade are given in Figure 4. From Fig.
3, we can observe that DetectoRS is able to detect
bounding boxes accurately for both small and large
check-dams as well as in both green and dry surround-
ings. From Fig. 4, we can observe that HTC is able
to perform instance segmentation precisely on check-
dams in both dry and wet streams.
5.2 Observations and Analysis
Recent works have integrated different techniques for
improving the performance of object detection and
instance segmentation tasks. Any improvement that
reduces the number and size of the various network
parameters without affecting the other aspects of de-
tection or segmentation can speedup the inference
stage. In sliding window based detectors, the over-
lap between adjacent windows can be reduced by fea-
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
328
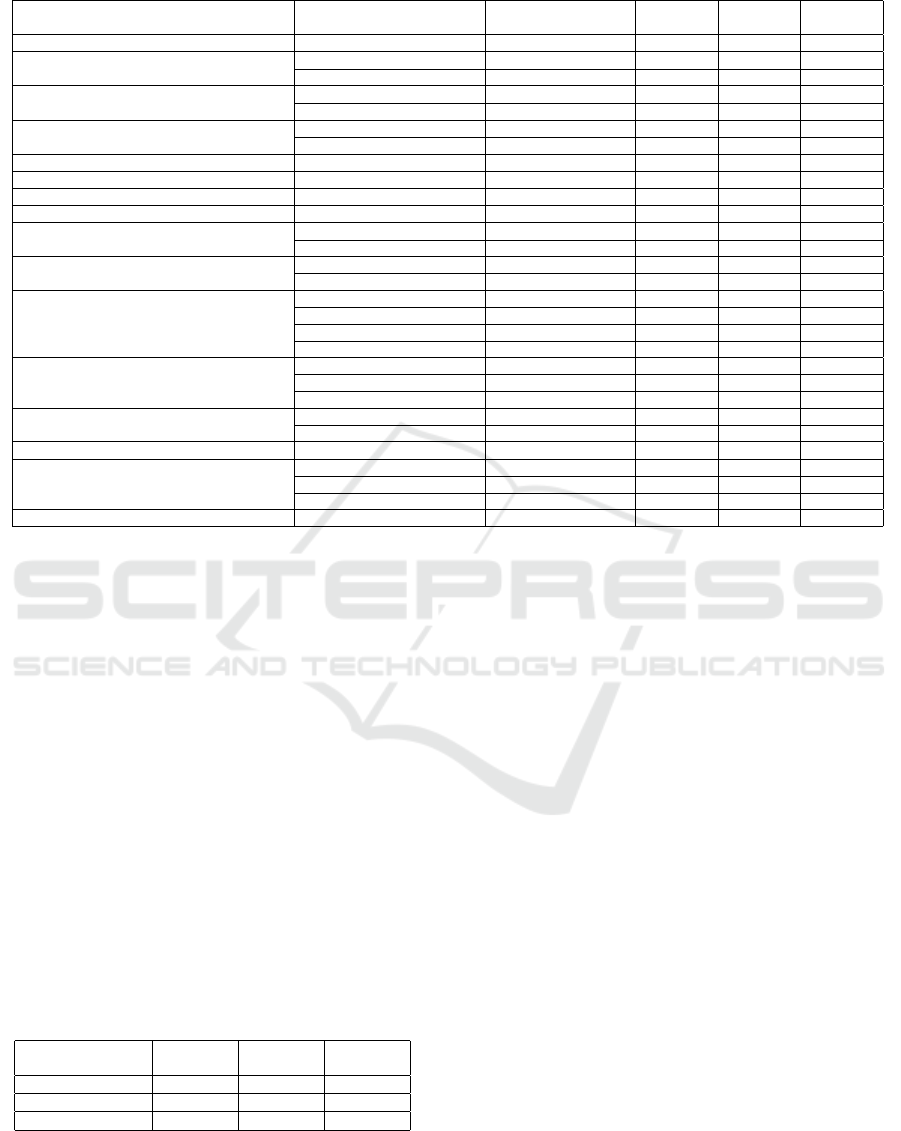
Table 4: Comparison of the performance of various object detection methods on checkdam dataset.
Method Model Name Backbone
bbox mAP
(0.50:0.95)
bbox mAP
(0.50)
bbox mAP
(0.75)
Faster RCNN-Scratch Faster RCNN R-50-FPN 0.145 0.381 0.077
Faster RCNN (Ren et al., 2015)
Faster RCNN R-50-FPN 0.597 0.948 0.699
Faster RCNN R-101-FPN 0.576 0.94 0.625
YOLOv3 (Redmon and Farhadi, 2018)
YOLOv3
Darknet53 (Scale-416)
0.504 0.923 0.503
YOLOv3
Darknet53 (Scale-608)
0.526 0.939 0.588
RetinaNet (Lin et al., 2017)
RetinaNet R-50 0.580 0.940 0.670
RetinaNet R-101 0.586 0.946 0.681
Free Anchor (Zhang et al., 2019) RetinaNet R-50 0.574 0.939 0.654
Generalized Focal Loss (Li et al., 2020b) GFL R-101 0.519 0.918 0.519
CascadeRPN (Vu et al., 2019) FasterRCNN R-50 0.583 0.945 0.610
Dynamic RCNN (Zhang et al., 2020) FasterRCNN R-50 0.557 0.951 0.592
Empirical Attention (Zhu et al., 2019)
FasterRCNN (0010) R-50 0.594 0.953 0.667
FasterRCNN (1111) R-50 0.597 0.945 0.710
FCOS Object Detector (Tian et al., 2019)
FCOS R-50 0.262 0.612 0.161
FCOS R-101 0.191 0.481 0.116
SparseRCNN (Sun et al., 2020)
SparseRCNN (#Prop: 100) R-50 0.573 0.935 0.596
SparseRCNN (#Prop: 300) R-50 0.580 0.944 0.647
SparseRCNN (#Prop: 100) R-101 0.577 0.939 0.647
SparseRCNN (#Prop: 300) R-101 0.554 0.937 0.609
Cascade RCNN (Cai and Vasconcelos, 2019)
CascadeRCNN R-50 0.601 0.939 0.701
CascadeRCNN R-101 0.593 0.941 0.658
CascadeRCNN ResNeXt-101 0.600 0.943 0.685
CornerNet (Law and Deng, 2018)
CornerNet (BS: 8x6) HourglassNet 0.570 0.894 0.672
CornerNet (BS: 32x3) HourglassNet 0.575 0.904 0.662
Centripetal Net (Dong et al., 2020) CornerNet (Batch Size 16x6) HourglassNet 0.598 0.943 0.686
DetectoRS (Qiao et al., 2020)
CascadeRCNN DectoRS R-50 0.615 0.967 0.711
RFP - HTC + R-50 DectoRS R-50 0.617 0.953 0.693
SAC - HTC + R-50 DectoRS R-50 0.625 0.966 0.749
Deformable DETR (Zhu et al., 2020) Two-stage Deformable DETR R-50 0.540 0.930 0.584
ture map shared computation of the whole image only
once before sliding windows. Similarly, grouping the
feature channels into independent groups can also re-
duce the parameter count. Another way to reduce the
complexity of a layer and filters is to approximate it
with fewer filters and a non-linear activation. Fac-
torizing convolutions is an efficient way to replace a
very large filter with smaller filter sizes, which can
share the same receptive fields while being efficient.
The local context can help improve the object detec-
tion by referring to the visual area that surrounds the
objects of interest. Similarly the global context can
help integrate the information of the different scene
elements by having larger receptive fields or a global
pooling of the CNN features, to improve the object
detection performance.
Table 5: Comparing localization distillation performance
using different neural network architectures between the
(T)eacher and the (S)tudent.
Backbone
bbox mAP
(0.50:0.95)
bbox mAP
(0.50)
bbox mAP
(0.75)
R-101 (T), R-18 (S)
0.532 0.934 0.572
R-101 (T), R-34 (S)
0.592 0.966 0.670
R-101 (T), R-50 (S)
0.566 0.957 0.654
6 CONCLUSIONS
We introduced MIS Check-Dam, a dataset for check-
dams that belongs to the class of minor irrigation
structures for agricultural use. We benchmark our
dataset on some of the most recent object detection
methods and instance segmentation methods. We
also assess the importance of various components in
the pipeline after evaluating these methods on our
novel dataset. Future works can try domain adapta-
tion methods on our dataset and other related datasets
that have related classes like dams.
REFERENCES
Bolya, D., Zhou, C., Xiao, F., and Lee, Y. J. (2019).
YOLACT: Real-time Instance Segmentation. In
ICCV.
Cai, Z. and Vasconcelos, N. (2019). Cascade R-CNN: High
Quality Object Detection and Instance Segmentation.
IEEE TPAMI.
Cao, Y., Chen, K., Loy, C. C., and Lin, D. (2020). Prime
Sample Attention in Object Detection. In IEEE CVPR.
Chen, H. and Shi, Z. (2020). A Spatial-Temporal Attention-
Based Method and a New Dataset for Remote Sensing
Image Change Detection. Remote Sensing.
Chen, K., Lin, D., and et. al (2019a). Hybrid Task Cascade
for Instance Segmentation. In IEEE CVPR.
The MIS Check-Dam Dataset for Object Detection and Instance Segmentation Tasks
329

Chen, K., Wang, J., Pang, and et. al. (2019b). MMDetec-
tion: Open MMLab Detection Toolbox and Bench-
mark. arXiv:1906.07155.
Dong, Z., Li, G., Liao, Y., Wang, F., Ren, P., and Qian, C.
(2020). CentripetalNet: Pursuing High-Quality Key-
point Pairs for Object Detection. In IEEE CVPR.
Everingham, M., Van Gool, L., Williams, C. K. I., Winn,
J., and Zisserman, A. (2012). The PASCAL Visual
Object Classes Challenge 2012 (VOC2012) Results.
Fang, H.-S., Sun, J., Wang, R., Gou, M., Li, Y.-L., and Lu,
C. (2019). Instaboost: Boosting Instance Segmen-
tation via Probability Map Guided Copy-Pasting. In
IEEE ICCV.
Fedus, W., Zoph, B., and Shazeer, N. (2021). Switch Trans-
formers: Scaling to Trillion Parameter Models with
Simple and Efficient Sparsity. arXiv:2101.03961.
Girshick, R. (2015). Fast R-CNN. In 2015 IEEE ICCV.
Girshick, R., Donahue, J., Darrell, T., and Malik, J. (2014).
Rich Feature Hierarchies for Accurate Object Detec-
tion and Semantic Segmentation. In 2014 CVPR.
Google Static Maps (2021). Google Maps JavaScript API
Version 3 Reference.
Henderson, P., Islam, R., Bachman, P., Pineau, J., Precup,
D., and Meger, D. (2018). Deep Reinforcement Learn-
ing That Matters. In AAAI.
Hsieh, M.-R., Lin, Y.-L., and Hsu, W. H. (2017). Drone-
based Object Counting by Spatially Regularized Re-
gional Proposal Networks. In IEEE ICCV.
Jiao, L. and Zhao, J. (2019). A Survey on the New Gen-
eration of Deep Learning in Image Processing. IEEE
Access.
Kumar, R., Dabral, R., and Sivakumar, G. (2021). Learning
Unsupervised Cross-domain Image-to-Image Transla-
tion using a Shared Discriminator. In Vol. 4: VISAPP.
Law, H. and Deng, J. (2018). Cornernet: Detecting objects
as Paired Keypoints. In 15th ECCV 2018.
Li, K., Wan, G., Cheng, G., Meng, L., and Han, J. (2020a).
Object Detection in Optical Remote Sensing Images:
A Survey and a New Benchmark. ISPRS.
Li, X., Yang, J., and et. al (2020b). Generalized Focal Loss:
Learning Qualified and Distributed Bounding Boxes
for Dense Object Detection. arXiv:2006.04388.
Lin, T., Maire, M., Zitnick, C. L., and et. al. (2014). Mi-
crosoft COCO: common objects in context. CoRR,
abs/1405.0312.
Lin, T.-Y., Goyal, P., Girshick, R., He, K., and Doll
´
ar, P.
(2017). Focal Loss for Dense Object Detection. In
IEEE ICCV.
Liu, W., Anguelov, D., Erhan, D., Szegedy, C., Reed, S.,
Fu, C.-Y., and Berg, A. C. (2016). SSD: Single Shot
MultiBox Detector. In ECCV 2016.
Liu, Z., Guo, B., and et. al (2021). Swin Transformer: Hier-
archical Vision Transformer using Shifted Windows.
CoRR, abs/2103.14030.
Long, Y., Gong, Y., Xiao, Z., and Liu, Q. (2017). Accurate
Object Localization in Remote Sensing Images Based
on Convolutional Neural Networks. IEEE TGRS.
Maggiori, E., Tarabalka, Y., Charpiat, G., and Alliez, P.
(2017). Can Semantic Labeling Methods Generalize
to Any City? The Inria Aerial Image Labeling Bench-
mark. In IEEE IGARSS.
Qiao, S., Chen, L., and Yuille, A. (2020). DetectoRS: De-
tecting Objects with Recursive Feature Pyramid and
Switchable Atrous Convolution. arXiv:2006.02334.
Redmon, J., Divvala, S., Girshick, R., and Farhadi, A.
(2016). You Only Look Once: Unified, Real-Time
Object Detection. In 2016 IEEE CVPR.
Redmon, J. and Farhadi, A. (2017). YOLO9000: Better,
Faster, Stronger. In 2017 IEEE CVPR.
Redmon, J. and Farhadi, A. (2018). Yolov3: An incremental
improvement. CoRR, abs/1804.02767.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster R-
CNN: Towards Real-Time Object Detection with Re-
gion Proposal Networks. In NeurIPS, volume 28.
Rossi, L., Karimi, A., and Prati, A. (2020). A novel region
of interest extraction layer for instance segmentation.
CoRR, abs/2004.13665.
Russakovsky, O., Fei-Fei, L., and et. al (2015). Imagenet
large scale visual recognition challenge. IJCV.
Shermeyer, J., Hossler, T., Van Etten, A., Hogan, D.,
Lewis, R., and Kim, D. (2020). RarePlanes: Syn-
thetic Data Takes Flight. In-Q-Tel - CosmiQ Works
and AI.Reverie.
Sun, P., Luo, P., and et. al (2020). SparseR-CNN: End-
to-End Object Detection with Learnable Proposals.
arXiv:2011.12450.
Tian, Z., Shen, C., Chen, H., and He, T. (2019). FCOS:
Fully Convolutional One-Stage Object Detection.
arXiv:1904.01355.
Tundia, C., Tank, P., and Damani, O. (2020). Aiding Irri-
gation Census in Developing Countries by Detecting
Minor Irrigation Structures from Satellite Imagery. In
6th Inter. Conf. on GISTAM.
Vu, T., Jang, H., Pham, T. X., and Yoo, C. D. (2019).
Cascade RPN: Delving into High-Quality Region
Proposal Network with Adaptive Convolution. In
NeurIPS.
Weir, N., Lindenbaum, D., Bastidas, A., Etten, A., Kumar,
V., Mcpherson, S., Shermeyer, J., and Tang, H. (2019).
SpaceNet MVOI: A Multi-View Overhead Imagery
Dataset. In 2019 IEEE/CVF ICCV.
Yang, D. M. (2018). ITCVD Dataset. DANS. Faculty of
GIS and Earth Observation (ITC).
Zhang, H., Chang, H., Ma, B., Wang, N., and Chen,
X. (2020). Dynamic R-CNN: Towards High
Quality Object Detection via Dynamic Training.
arXiv:2004.06002.
Zhang, X., Wan, F., Liu, C., Ji, R., and Ye, Q. (2019).
FreeAnchor: Learning to Match Anchors for Visual
Object Detection. In NeurIPS.
Zheng, Z., Ye, R., Wang, P., Wang, J., Ren, D., and Zuo, W.
(2021). Localization Distillation for Object Detection.
arXiv:2102.12252.
Zhu, X., Cheng, D., Zhang, Z., Lin, S., and Dai, J. (2019).
An Empirical Study of Spatial Attention Mechanisms
in Deep Networks. arXiv:1904.05873.
Zhu, X., Su, W., Lu, L., Li, B., Wang, X., and Dai, J. (2020).
Deformable DETR: deformable transformers for end-
to-end object detection. CoRR, abs/2010.04159.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
330
