
Motion-constrained Road User Tracking for Real-time Traffic Analysis
Nyan Bo Bo
1,2 a
, Peter Veelaert
1,2 b
and Wilfried Philips
1,2
1
TELIN-IPI, Ghent University, Sint-Pietersnieuwstraat 41, B-9000 Gent, Belgium
2
imec, Kapeldreef 75, B-3001 Leuven, Belgium
Keywords:
Real-time Tracking, Automatic Traffic Analysis, Edge Processing, Privacy Preservation, Turning Movement
Count.
Abstract:
Reliability of numerous smart traffic applications are highly dependent on the accuracy of underlying road user
tracker. Demand on scalability and privacy preservation pushes vision-based smart traffic applications to sense
and process images on edge devices and transmit only concise information to decision/fusion nodes. One of
the requirements for deploying a vision algorithm on edge devices is its ability to process captured images in
real time. To meet these needs, we propose a real-time road user tracker which outperforms state-of-the-art
trackers. Our approach utilizes double thresholding on detector responses to suppress initialization of false
positive trajectories while assuring corresponding detector responses required for updating trajectories are not
wrongly discarded. Furthermore, our proposed Bayes filter reduces fragmentation and merging of trajectories
which highly effect the performance of subsequent smart traffic applications. The performance of our tracker
is evaluated on the real life traffic data in turning movement counting (TMC) application and it achieves a high
precision of 96% and recall of 95% while state-of-the-art tracker in comparison achieves 92% on precision
and 87% on recall.
1 INTRODUCTION
Many computer vision-based smart traffic applica-
tions such as automatic turning movement counting
(TMC), speed estimation, unusual trajectory detec-
tion, etc. require tracking of multiple road users si-
multaneously. The reliability of these applications is
highly dependent on the performance, i.e., accuracy,
precision and speed, of the underlying visual tracker.
Beside the performance, the privacy preservation
of road users also plays an important role in deploy-
ing camera-based applications in public spaces. For-
tunately, the justified fears of camera invading privacy
can be reduced by technological means. The major
worry is that the video captured by the cameras can
be abused. This problem can be avoided by process-
ing the video inside the camera. Video that is never
sent from the camera cannot be abused.
In technical terms, this requires smart cam-
eras(Rinner and Wolf, 2008): cameras with on-board
processing and communication capabilities. How-
ever, smart cameras usually possess lower computa-
tional power than desktop computers. Therefore, the
a
https://orcid.org/0000-0002-6904-4672
b
https://orcid.org/0000-0003-4746-9087
computational complexity of a computer vision algo-
rithm must be kept low for real-time deployment on
a smart camera. Due to the limited field of view of
cameras, multiple smart cameras are required to cover
a wide area. Unlike centralized systems, this scale up
can be achieved without computational and commu-
nication bottleneck since the computation load is dis-
tributed among many smart cameras and only concise
information is transmitted rather than video streams.
To these ends, we propose a real-time road user
tracker which is suitable to deploy on edge devices for
privacy conservation. Unlike a conventional tracking-
by-detection scheme in which detector responses are
thresholded with a single threshold, we propose a
double thresholding approach which is the first con-
tribution of this paper. A higher threshold is used
for an initialization of new tracks without producing
a high number of false positives while a lower one is
used to decide if a detector response is reliable enough
to update the trajectory. The second contribution is
the Bayes filter cascade with a constrained matching
which significantly reduces mismatching of trajecto-
ries to detector responses. As a third contribution,
we evaluated the performance of our tracker on video
stream of real-life traffic in the city of Antwerp, Bel-
gium.
Bo, N., Veelaert, P. and Philips, W.
Motion-constrained Road User Tracking for Real-time Traffic Analysis.
DOI: 10.5220/0010788700003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 5: VISAPP, pages
785-792
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
785

To investigate the exact accuracy of the statistics,
we conducted a one time experiment in which we
compared our automatic traffic statistics in a street to
the correct value (determined by a human observer).
We achieved a precision of 96% and recall of 95%,
outperforming the state-of-the-art method in literature
whose precision and recall is 92% and 87% respec-
tively.
2 RELATED WORK
The work of (Bochinski et al., 2017) experimen-
tally shows that their simple tracker based on the
intersection-over-union (IOU) of detector responses
at sufficiently high frame rates outperforms the state-
of-the-art tracker at only a fraction of the computa-
tional cost. However, their method assumes that the
detector produces a detection per frame for every ob-
ject being tracked allowing only few missed detec-
tions. This assumption is often invalid when an object
is occluded for a few frames. Although the computa-
tional cost of their tracker is very low, its requirement
for high frame rate videos to ensure a large overlap
between detections in consecutive frames poses a high
computational load on CNN-based object detection.
The shortcomings of the tracker of (Bochinski
et al., 2017) are addressed in the Simple Online and
Real-time Tracking (SORT) of (Bewley et al., 2016)
while keeping a low computational cost. The SORT
tracker deploys Kalman filtering not only to filter
noise in trajectories but also to handle missing de-
tections. Similar to the work of (Bochinski et al.,
2017), the assignment of detections to existing trajec-
tories are based on the intersection-over-union (IOU)
distance between each detection and all the predicted
bounding boxes of the Kalman filter. If no matched
detection is found, i.e., when the detector failed to de-
tect the object because it was occluded or corrupted
by image noise, the Kalman filter prediction becomes
the estimated state of the object. When there is a
matched detection, the estimated state is corrected by
incorporating information from the matched detec-
tion. The work of (Tran et al., 2021) utilizes SORT
tracker in their turning movement counting system
which is designed to be deployed on edge devices.
Since the detection-to-trajectory assignment of the
SORT tracker is solely based on the motion model
of the Kalman filter and the IOU distance, the SORT
tracker experiences more identity switches between
tracked objects than the state-of-the-art trackers al-
though it outperforms in terms of Multiple Object
Tracking Accuracy (MOTA). To tackle the identity
switching problem of SORT tracker, (Wojke et al.,
2017) extend the detection-to-trajectory assignment
method of SORT by integrating appearance informa-
tion. They experimentally show that their extended
method, i.e. extending SORT tracker with a deep as-
sociation metric (DeepSORT), reduces the number of
identify switches by 45% while maintaining overall
competitive performance at high frame rates. How-
ever, identity switching between road users with sim-
ilar appearance still occur when they are close by.
Some CNN-based trackers (Xu and Niu, 2021;
Gloudemans and Work, 2021) perform detection and
association across frames jointly by utilizing feed-
back information from object tracking. Since the
previous object location and appearance information
from the tracker is used as region proposal/prior in
detection and association to narrow down the search
space, this approach is faster than detect–associate–
track approach. (Gloudemans and Work, 2021) fol-
low this approach to generate trajectories for TMC
application. Since object detection is never performed
on a full frame, they claim that their method is ap-
proximately 50% faster than state-of-the-art methods
in comparison. However, evaluation result indicates
that their accuracy is lower than the DeepSort-based
method (Lu et al., 2021).
The aforementioned trackers assume a very gen-
eral tracking scenario where the cameras are not cali-
brated. However, trajectories on the ground plane are
often required in smart traffic applications for trajec-
tory clustering, abnormal behavior detection, analyz-
ing the interaction between road users and so on. The
projection of the road user’s position from an image
coordinates to the ground coordinates (GPS coordi-
nates) can be found by determining the transformation
(i.e., a homography) between the image plane and the
ground plane. Since an image position can be mapped
onto a ground position, Bayesian state estimation can
be applied to the ground plane instead of the image
plane.
Furthermore, a road user moving with constant ve-
locity can result in non-constant velocity movement
in the image plane. In addition to this, accelera-
tion/deceleration of the road user can cause even more
complex movement on the image plane. Therefore,
our earlier work (Nyan et al., 2020) utilizes image to
ground plane projection and tracks road users on the
ground plane using Bayesian state estimation. How-
ever in this earlier work, only size and position dif-
ference between the prediction of the Bayesian filter
and the detector responses are considered in the cost
function formulation for track–detection association.
Incorporating appearance information in cost function
as in the work of (Wojke et al., 2017) could result in
performance improvement.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
786
3 THE PROPOSED METHOD
Our real-time traffic analysis system is designed
to run entirely on a smart camera, i.e., a hard-
ware platform with an onboard camera, processors
(CPU+GPU) and a communication module. The
video frame grabber reads an image from the im-
age sensor and feeds it to the YOLO object detector
(Redmon et al., 2016) where locations of road users
are identified. Our proposed constrained Bayes filter
cascade tracks the YOLO detector responses to gen-
erate trajectories as input for the subsequent trajec-
tory analysis block. Statistics of road users such as
counts, speed, acceleration/deceleration, etc. can be
extracted and transmitted to higher level smart traf-
fic applications which may fuse this information with
data streams from other data source/modality for joint
traffic analysis/prediction.
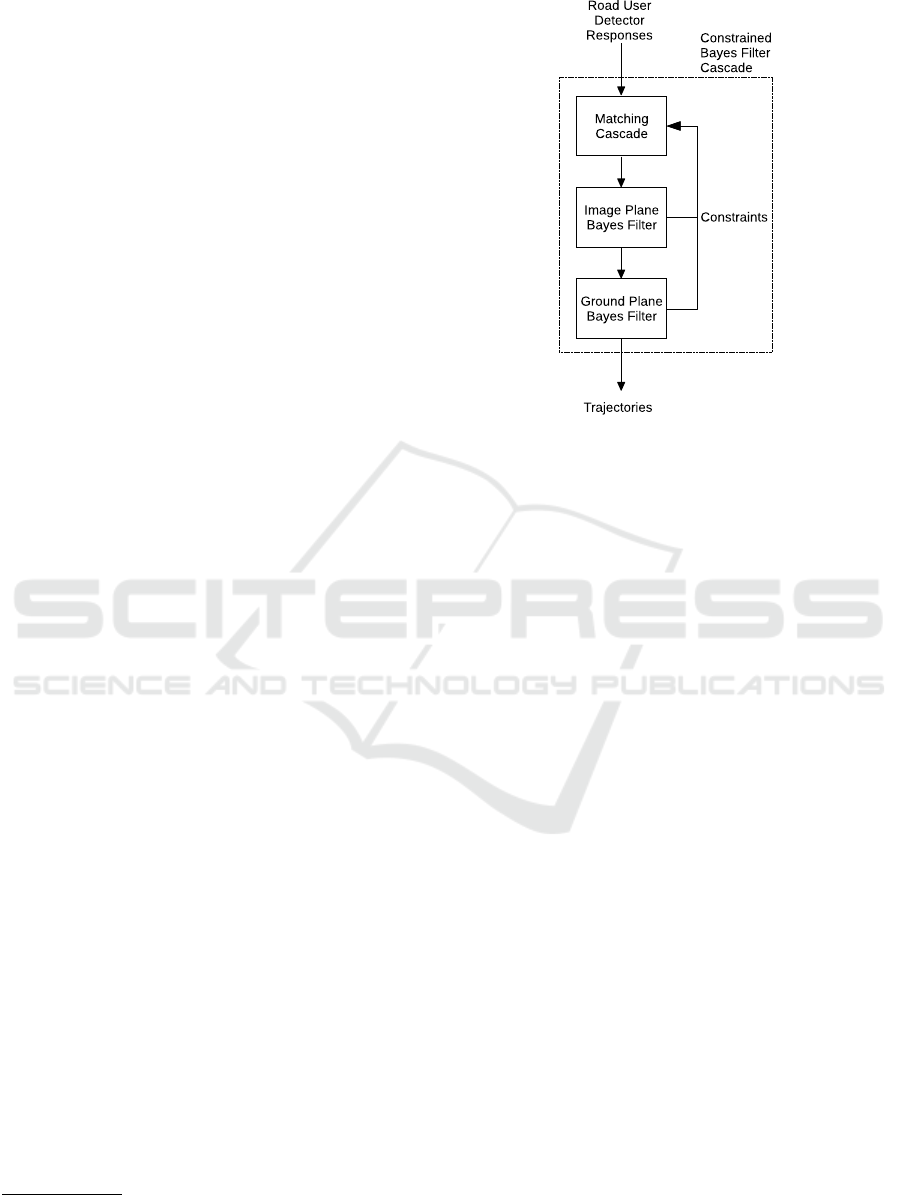
3.1 Constrained Bayes Filter Cascade
The constrained Bayes filter block consists of three
modules as depicted in Figure 1. Detector responses
from the YOLO detector
1
are matched with existing
trajectories in the matching cascade module taking
into account the feedback constraints from both im-
age and ground plane Bayes filter modules. Matched
detector responses are then used to update the corre-
sponding trajectories while unmatched ones are ini-
tialized as new trajectories. The detailed descrip-
tion on cascade module will be given later in Subsec-
tion 3.2 after some prerequisites have been discussed.
In detector-based tracking methods (Bochinski
et al., 2017; Bewley et al., 2016; Wojke et al., 2017;
Nyan et al., 2020), a threshold T is usually applied to
the score of detector responses to suppress false pos-
itive detections. If T is set low, more false positive
responses will be forwarded to the matching cascade.
Since the matching cascade will not find any matching
trajectory for these false positive responses, they are
initialized as new trajectories, resulting in false pos-
itive trajectories. On the other hand, when setting T
high to reduce the false positive rate, some true pos-
itives are sometimes rejected causing missed detec-
tions of a true road user. Multiple missed detections
of the same road user often lead to untimely termina-
tion of the trajectory, i.e., incomplete trajectory. If the
road user is then redetected, a new trajectory is ini-
tialized creating multiple trajectories of a single road
user, i.e., fragmented trajectories.
Since no detector is perfect, even if T is optimally
set, the problem of false positive, incomplete or seg-
1
Only a subset of YOLO output classes, i.e., car, truck,
bus and train (tram) are used in this work.
Figure 1: Modules of the proposed Bayes filter cascade.
mented trajectories still exists. This issue can be mit-
igated by using two thresholds: a higher threshold for
initialization of new trajectories and a lower threshold
for updating the existing trajectories. First, a thresh-
old T
l
is applied to the score of all detector responses.
Only responses with a score higher than T
l
are con-
sidered further in the matching cascade. Then a sec-
ond threshold T
h
> T
l
is applied to the unmatched re-
sponses produced by the matching cascade module.
An unmatched responses is initialized as a new tra-
jectory only if its detection score is higher than T
h
.
To keep track of position, appearance and size of
the road user in the image, the image plane Bayes
filter is deployed. It estimates the eight dimen-
sional state space of a road user denoted as r =
[u, v, γ, h, ˙u, ˙v,
˙
γ,
˙
h]
T
based on the corresponding detec-
tor responses d = [u, v, γ, h]
T
selected by the matching
cascade module. The center position of a road user ei-
ther being tracked or detected is defined by u, v while
aspect ratio γ and height h determine its size. The
rate of change of position and size of the road user is
defined by ˙u, ˙v and
˙
γ,
˙
h respectively. Similar to the re-
lated state-of-the-art trackers (Bochinski et al., 2017;
Bewley et al., 2016; Wojke et al., 2017; Nyan et al.,
2020), a standard Kalman implementation of a Bayes
filter with a constant velocity motion model and a lin-
ear observation model is employed for its low compu-
tational complexity.
In addition to the image plane filter, the ground
plane Bayes filter not only suppresses image plane–
ground plane projection noise but also naturally mod-
els the motion of road users on the ground plane. It
estimates the four dimensional state space of a road
Motion-constrained Road User Tracking for Real-time Traffic Analysis
787

user denoted as
´
r = [x, y, ˙x, ˙y]
T
where x, y represent the
ground plane position while ˙x and ˙y denote velocity
components. Given a homography matrix H
3×3
, an
image plane position of a road user can be projected
onto the ground plane:
λ
x
y
1
= H
3×3
u
v +
h
2
1
(1)
The center position [u, v]
T
of a matched detector re-
sponses d is projected onto the ground plane as
´
d =
[x, y]
T
to update the ground plane state of the corre-
sponding road user.
For each trajectory, we keep track of the number
of consecutive frames in which the trajectory did not
have any matched detection, i.e., no observation. This
count is denoted as c
i
and it increases for each frame
that does not have a matched detection for the tra-
jectory. When c
i
exceeds a threshold T
c
, i.e., when
there is no observation for T
c
consecutive frames, the
corresponding road user is considered to have left the
camera’s field of view or its appearance in the camera
view has become smaller than what the object detec-
tor is able to detect. In this situation, the trajectory
is terminated. If the corresponding matched detector
response is found again before c exceeds T
c
, it is reset
to zero.
3.2 Matching Cascade
The purpose of the matching cascade module is to
correctly match the object detector responses to their
corresponding trajectories so that both the image and
ground plane Bayes filters can update their states. The
matching is usually done by computing a cost matrix,
that contains the matching costs between the detec-
tor responses and the predictions of the Bayes filter.
A combinatorial optimization algorithm such as the
Hungarian algorithm (Kuhn and Yaw, 1955) is then
applied to find the matched pairs with minimum cost.
In this work, we adopt the cost matrix of (Wojke
et al., 2017) which integrates motion and appearance
information of the objects being tracked. To incor-
porate the motion information, the Mahalanobis dis-
tance between a predicted position of a trajectory i
and the j-th detected position d
j
is computed as:
∆
m
(i, j) = (d
j
−
¨
r
i
)
T
¨
Σ
−1
i
(d
j
−
¨
r
i
), (2)
where
¨
r
i
= I
ˆ
r
i
and
¨
Σ
i
= I
ˆ
Σ
i
I
T
are the projection of
predicted state
ˆ
r
i
and the corresponding covariance
matrix
ˆ
Σ
i
of the trajectory i. The matrix I is a 4 × 8
matrix:
I =
1, 0, 0, 0, 0, 0, 0, 0
0, 1, 0, 0, 0, 0, 0, 0
0, 0, 1, 0, 0, 0, 0, 0
0, 0, 0, 1, 0, 0, 0, 0
. (3)
Furthermore, an appearance descriptor a
j
with
||a
j
|| = 1 is computed for each bounding box de-
tection d
j
. A pre-trained residual network proposed
by (Wojke and Bewley, 2018) on large-scale re-
identification dataset by (Kanaci et al., 2018) is used
to compute a
j
. For each trajectory i, a gallery A
i
=
{a
i,k
}
K
k=1
of K latest appearance descriptors is con-
structed. When a new trajectory is initialized, there
is a single appearance descriptor in A
i
. A new ap-
pearance descriptor is added to A
i
only if there is a
matched detector response. The oldest appearance de-
scriptor in A
i
is removed if number of appearance de-
scription in it exceeds K. Given A
i
, the appearance
dissimilarity between the trajectory i and the detec-
tion j can be computed as:
∆
a
(i, j) = min{1 − a
T
j
a
i
|a
i
∈ A
i
}. (4)
Since a
T
j
a
i
equals the cosine of the angle between a
j
and a
i
, ∆
a
(i, j) is small when an appearance descrip-
tor a
i
along trajectory i is very similar to the detector
response j.
Both the Mahalanobis distance ∆
m
and appearance
dissimilarity ∆
a
are complementary as they are cov-
ering different aspects of the trajectory-to-detection
matching task. The Mahalanobis distance ∆
m
mea-
sures the location proximity as well as the similarity
in size of a detection to a trajectory based on motion,
and is particularly useful for short-term occlusion.
However, motion becomes less reliable when the ob-
ject is occluded for a longer period of time or when a
detector fails due to noise. If this is the case, identity
switching often occurs. The appearance distance ∆
a
is
particularly useful to mitigate this switching problem.
Both metrics are combined using a weighted sum to
compute the cost matrix for the assignment problem:
∆(i, j) = λ∆
m
(i, j) + (1 − λ)∆
a
(i, j), (5)
where the weight λ can be experimentally tuned to
achieve the optimal performance.
Furthermore, additional constraints can be incor-
porated in the cost computation to exclude unlikely
associations. When the appearance dissimilarity is
very high, it is unlikely to be a true match. Therefore,
we apply a threshold T
a
to define a binary variable
g
a
(i, j) as follows:
g
a
(i, j) = [∆
a
(i, j) < T
a
]. (6)
As long as ∆
a
(i, j) is smaller than T
a
, g
a
(i, j) = 1 and
g
a
(i, j) = 0 otherwise. This constitutes the constraint
feedback from the image plane Bayes filter.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
788
For a road user in motion, given its past known
ground plane position, i.e., [x, y]
T
, and velocity at
t − 1, the prediction of its position at the current time t
is usually close to its true position. Therefore, the cor-
responding detector response should not be far from
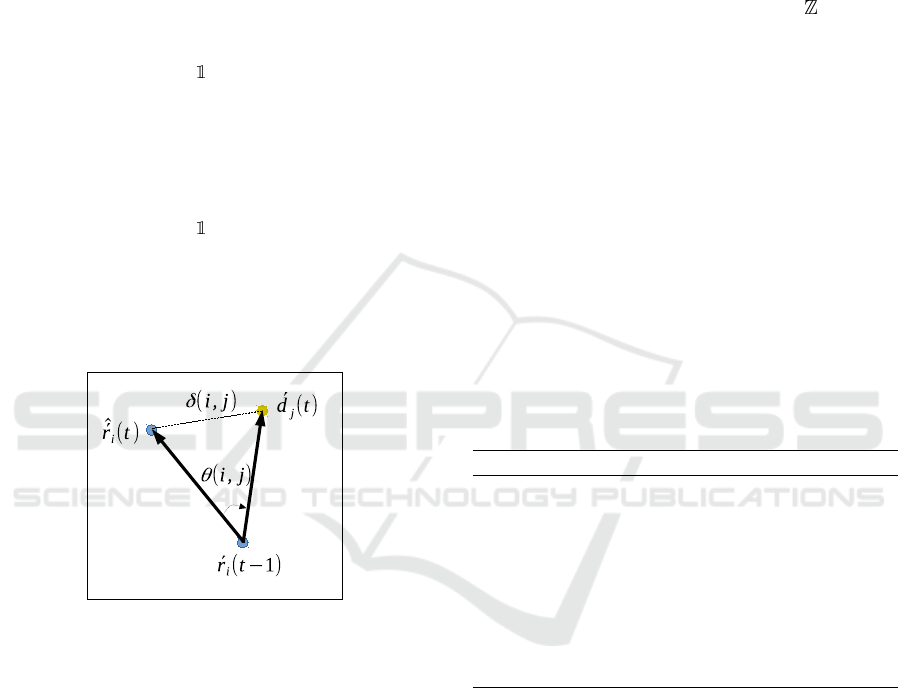
the predicted position. Based on this assumption, we
formulate a constraint (or gating function) on the an-
gle and magnitude between the current, the predicted
and the detected positions. A threshold T
θ
is applied
to the angle θ which is depicted in Figure 2 to create
another binary variable g
θ
:
g
θ
(i, j) = [θ(i, j) < T
θ
]. (7)
In addition to the constraints on the predicted and de-
tected direction, the distance between the predicted
and detected position is thresholded with T
d
to further
constrain the matching problem. Here, a binary vari-
able on magnitude g
d
is defined as:
g
d
(i, j) = [δ(i, j) < T
d
], (8)
where
δ(i, j) = ||
1, 0, 0, 0
0, 1, 0, 0
ˆ
´
r
i
−
´
d
j
|| (9)
as shown in Figure 2.
Figure 2: An illustration of δ(i, j) and θ(i, j) between a pre-
dicted state the ground plane Bayes filter and a detector re-
sponse.
A prediction-detection pair is qualified to be in-
cluded in the matching cascade only if all defined bi-
nary variables g
a
, g
θ
and g
d
are equal to one. There-
fore, we define the aggregation of these three binary
variables g as:
g(i, j) = g
a
(i, j) g
θ
(i, j) g
d
(i, j). (10)
Together, these variables act as gating functions on
the position and appearance. The gated cost matrix
∆
g
can then be computed using Equation 5 and 10 as
follows:
∆
g
=
∆
g
(1, 1) ∆
g
(1, 2) . . . ∆
g
(1, J)
∆
g
(2, 1) ∆
g
(2, 2) . . . ∆
g
(2, J)
.
.
.
.
.
.
.
.
.
.
.
.
∆
g
(I, 1) ∆
g
(I, 2) . . . ∆
g
(I, J)
(11)
where
∆
g
(i, j) =
(
∆(i, j) If g(i, j) is 1
κ otherwise
. (12)
The constant κ is set to be a very large number, i.e., a
very large cost.
Given the gated cost matrix ∆
g
between the I tra-
jectories and the J detector responses as well as the
frame counts C = {c
1
, c
2
, . . . , c
I
} and c
i
∈ , since the
last valid update with a matched response, the cascade
matching algorithm adopted from (Wojke et al., 2017)
and listed in Algorithm 1 is applied. The matrix ∆
g
is
computed using Equation 11 and 12. This matching
cascade does not treat all trajectories equally. It first
considers only trajectories for which c
i
= 0, i.e., tra-
jectories for which there is a matched detection in the
previous frame. Hungarian minimum cost matching
(Kuhn and Yaw, 1955) is applied to these trajectories
and all the detector responses that are still available.
The matched trajectories and detections are removed
from the matching pool and the remaining candidates
are considered in the next iteration. At the next itera-
tion, all trajectories with c
i
= 1, i.e., that did not have
a match in the previous frame and thus have higher
uncertainty, are considered in Hungarian matching.
The algorithm iterates until the maximum value in C
is reached.
Algorithm 1: Recursive matching cascade algorithm.
1: procedure MINCOSTMATCHING(∆
g
, C)
2: Matches: M ← φ
3: Unmatched detection: U ← {1, 2, . . . , J}
4: for c ∈ [0, 1, . . . , max(C)] do
5: L ← {i|i ∈ {1, 2, . . . , I} and c
i
= c}
6:
´
M ← Hungarian(∆, L)
7: M ← M ∪
´
M
8: U ← U \ { j|(∗, j) ∈ M}
return M, U
The matching cascade algorithm returns matched
pairs and unmatched detector responses. The matched
detector responses are used to update the state of their
corresponding trajectories in the Bayes filter while the
unmatched detector responses with score more than
T
h
are initialized as new trajectories.
4 EXPERIMENTS
To assess the performance of our tracker in smart traf-
fic application, we evaluate its performance in the
aspect of Turning Movement Count (TMC) applica-
tion. TMC at an intersection provides counts for road
users leaving a street x (source) and entering a street y
Motion-constrained Road User Tracking for Real-time Traffic Analysis
789
(destination) during a predefined time period. This
provides essential information on how traffic from
one street is flowing into other streets at the inter-
section. Manually obtaining TMC is highly labor
intensive since counts for N
2
, where N is the num-
ber of streets connecting to the intersection, source-
destination pairs have to be performed simultane-
ously. Fortunately, trajectories produced by visual
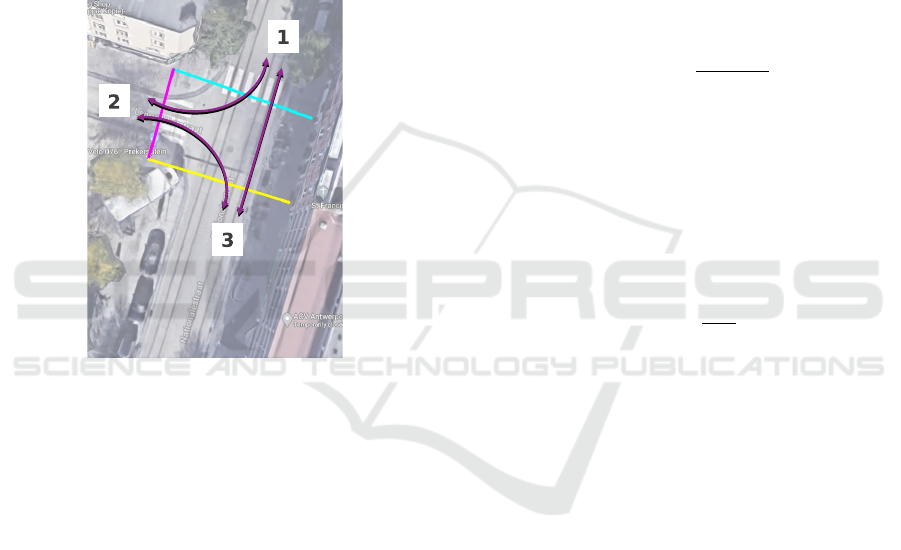
tracker can be used to automatically obtain TMC.
First, three lines at the entrance to each street at the in-
terest are defined as shown in Figure 3. Then the TMC
is simply obtained by increasing the corresponding
count of x → y when a trajectory intersects with line
x first and intersects later with line y.
Figure 3: Lines defined for automatic turning movement
counting. Arrows show the possible vehicle movements ex-
cluding u-turns. Map Data: ©2021 Google, ©2021 Aero-
data International Surveys.
4.1 Dataset and Performance Metrics
For the quantitative evaluation of our tracker on turn-
ing movement counting application, four hours long
video was captured between 7AM and 11PM from
Camera 11.1 of Antwerp’s smart zone (asz, ). The
video is captured at 24 fps with the resolution of
960×720 pixels using the AXIS Q6000-E MKII cam-
era located at the GPS coordinates 51°12
0
50.1
00
N 4
◦
23
0
53.5
00
E. The camera’s field of view covers the
intersection of a busy road Nationalestraat and a
smaller street Lange Vlierstraat.
For the quantitative performance assessment, we
manually annotated source and destination street of
each vehicle in the video. Due to labor inten-
sive nature of the manual annotation for TMC, only
video segments between 7:00AM and 7:30AM, and
10:30AM and 11:00AM are annotated, resulting in
annotations for 377 motorized road users. For quali-
tative evaluation on longer video, we captured a video
from Camera 11.1 for about three days covering both
weekend and weekdays, i.e., 14
th
to 17
th
of March
2021: from Sunday morning to Wednesday morning.
Furthermore, five GPS coordinates as well as corre-
sponding image coordinates of road markings visi-
ble in the camera’s filed of view is obtained. Using
these five GPS-image pairs, the image plane to ground
plane homography matrix H
3×3
is computed by using
least-squares method.
Two performance metrics, precision and recall,
are used for the quantitative performance assessment.
Precision measures the ratio of correctly counted tra-
jectories to the total count produced by the automatic
TMC: which may also contains wrongly counted tra-
jectories. It can be computed as:
precision =
T P
T P + FP
, (13)
where T P is a number of true positive count and FP
is a number of false positive count. Stray trajectories
caused by false positive detector responses and iden-
tity switches (a trajectory formed by two or more road
users) are two sources of false positive count. Recall,
also known as sensitivity, measures the ratio of cor-
rectly counted trajectories to the total number of tra-
jectories in the ground truth N
GT
:
recall =
T P
N
GT
. (14)
4.2 Quantitative Evaluation
In order to not only assess the performance of our
tracker but also to compare with the performance of
SOTA, the TMC is calculated from trajectories pro-
duced by our method as well as the SOTA tracker,
DeepSort (Wojke et al., 2017). The resulting TMCs
for all source-destination pairs together with ground
truth counts for both trackers are given in Table 1.
Both ground truth and automatic counts show that
there is almost no traffic coming out from 2 which
agrees with the fact that 2 (Lange Vlierstraat) is a
one-way street allowing only incoming traffic from
Nationalestraat. The ground truth indicates only a
single case of motorized road user coming out of 2
and turning into 3 which is in fact a truck reversing
out of the 2 after making a possibly wrong turn.
Table 1 shows that most road users move be-
tween 1 and 3: both are straight through movements.
U-turns at the intersection are also identified and
counted by both automatic methods but DeepSort is
overestimating u-turn counts by a large margin. These
false positive counts of DeepSort are caused by iden-
tity switching between road users as well as merg-
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
790
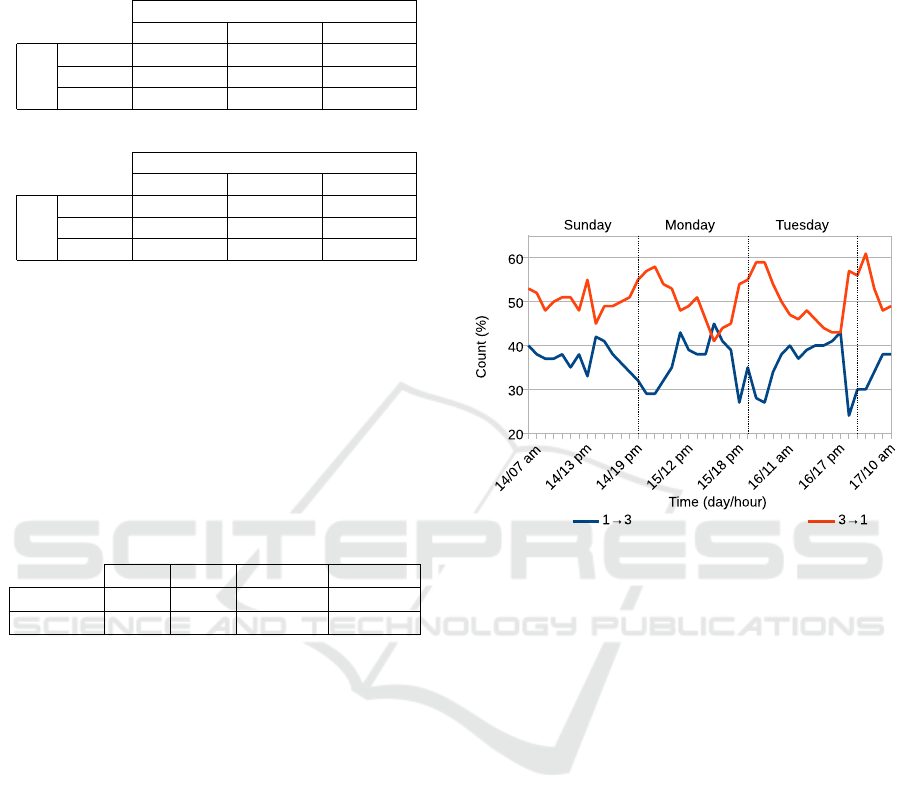
Table 1: Automatic TMC counts at intersection of 3 road
segments together with ground truth counts (automatic
TMC/ground truth).
Destination
1 2 3
Origin
1 1/1 9/10 119/123
2 1/0 1/0 1/1
3 207/209 30/30 6/3
(a) Our tracker
Destination
1 2 3
Origin
1 8/1 9/10 110/123
2 0/0 0/0 1/1
3 194/209 27/30 6/3
(b) DeepSort
ing of multiple trajectories. Fortunately, the con-
strained Bayesian tracking of our tracker is robust
against these problems, resulting in TMCs closer to
the ground truth, and achieving a precision of 96%
and a recall of 95%. Since the precision and recall
of DeepSort is 92% and 87% respectively, our tracker
outperforms DeepSort in both performance metrics.
The quantitative evaluation results are summarized in
Table 2.
Table 2: Detailed quantitative evaluation results.
TP FP Precision Recall
DeepSort 327 28 92% 87%
Ours 359 15 96% 95%
More detailed analysis of the resulting trajecto-
ries sheds some light on the outperformance of our
tracker over the tracker in comparison. High num-
ber of fragmentations as well as merging of trajecto-
ries are found in trajectories produced by the Deep-
Sort tracker. When a trajectory of a particular road
user is fragmented into multiple segments, the auto-
matic TMC fails to identify the source or destination
of the road user. Moreover, TMC often incorrectly
identifies the source and destination of a trajectory
which is the result of merging of trajectories of mul-
tiple road users. These issues not only decrease the
true positive TMCs but also increase the false positive
TMCs. Our proposed double thresholding and con-
strained Bayes filter cascade are more robust against
these issues. Thus, there is a significant reduction in
trajectory fragmentation and merging.
4.3 Qualitative Evaluation
Furthermore, automatic TMC is applied to trajecto-
ries produced by our tracker on three days long video
to observe the turning movement behavior over a
longer period of time. To observe the time varying
TMC along the course each day, TMC is computed
for every hour. Graphs in Figure 4 show how two
straight trough traffics (1 → 3 and 3 → 1) vary be-
tween 7AM and 7PM for each day. These percent-
ages of TMC for a specific source–destination pair is
based on the total of TMC for all source–destination
pair for the given period of time. It shows that traffic
going from 3 to 1 (inbound to Antwerp city center) is
usually denser than in the opposite direction, i.e., traf-
fic from 1 to 3, which is in line with the observation
from Table 1.
Figure 4: Percentage TMC counts by our method in relation
to total movement counts for 1 → 3 and 3 → 1 movements.
Moreover, graphs in Figure 4 shows that 3 → 1
traffic is the highest (∼ 60%) in the morning and de-
creases while 1 → 3 traffic from its lowest (∼ 30%)
increases over weekdays (Monday and Tuesday) un-
til late afternoon, around 4PM, where traffic in both
directions is almost the same (40%). Then, 3 → 1
traffic increases and 1 → 3 traffic decreases back. For
Sunday, 3 → 1 traffic is fluctuating around 50% while
1 → 3 traffic is varying around 35%.
In addition to hourly TMCs, we also computed
TMCs for each day. The traffic distribution at the
intersection is then computed from daily TMCs and
plotted as pie charts in Figure 5. All three pie charts
show that 3 → 1 movement constitutes approximately
50% of the traffic passing trough the intersection. Fur-
thermore, the 1 → 3 movement makes up approxi-
mately 35% of the total traffic flow at the intersection.
This indicates that on each day, there is more motor-
ized traffic towards the city center than outbound di-
rection passing through the intersection. Moreover,
it shows that traffic turning into 2 from 3 is approx-
imately two times more frequent than traffic turning
into 2 from 1: ∼ 8% and ∼ 4% respectively. The
remaining traffic which is about 3% consists of mo-
torized road users taking u-turns at the intersection.
Motion-constrained Road User Tracking for Real-time Traffic Analysis
791
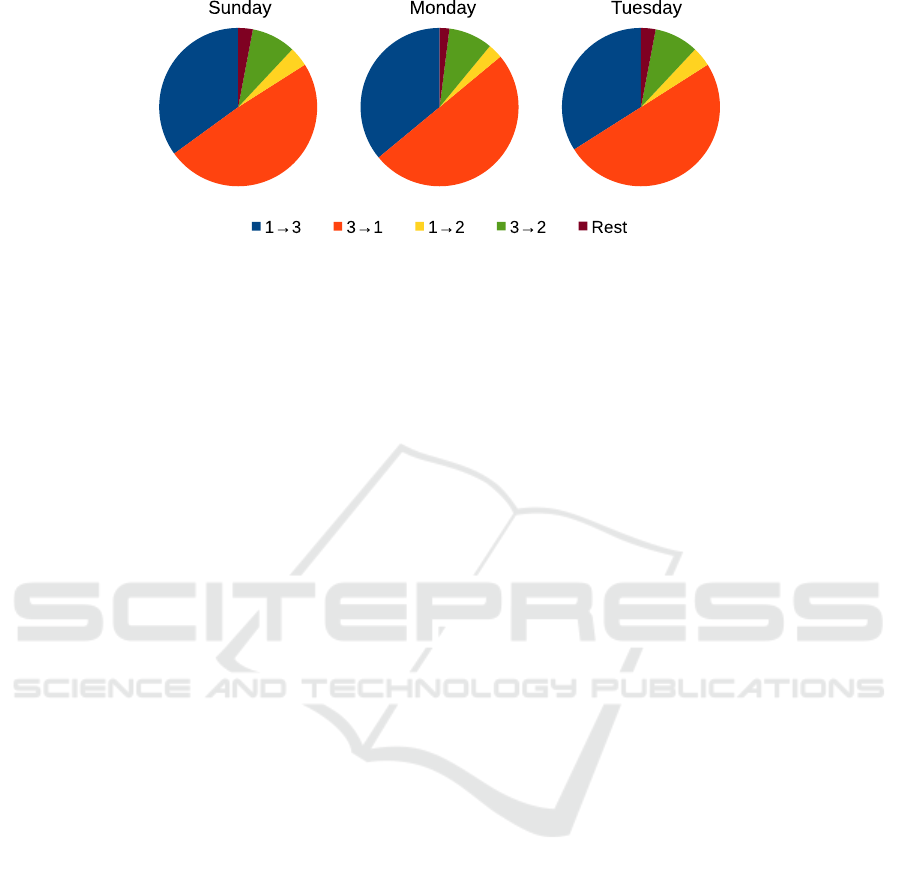
Figure 5: Daily traffic distribution computed from TMC at the intersection.
5 CONCLUSION
In this paper, we proposed a real-time road user
tracker which is robust against fragmentation and
merging of trajectories. This robustness is mostly
contributed by double thresholding on object detector
responses and the constrained matching of the Bayes
filter cascade. Moreover, quantitative performance
comparison to the SOTA method was also conducted
and outperformance of our method over state-of-the-
art tracker was validated.
ACKNOWLEDGEMENT
This work was funded by EU Horizon 2020 ECSEL
JU research and innovation programme under grant
agreement 876487 (NextPerception).
REFERENCES
Antwerp smart zone. https://antwerpsmartzone.be/. Ac-
cessed: 2021-09-08.
Bewley, A., Ge, Z., Ott, L., Ramos, F., and Upcroft, B.
(2016). Simple online and realtime tracking. In 2016
IEEE International Conference on Image Processing
(ICIP), pages 3464–3468.
Bochinski, E., Eiselein, V., and Sikora, T. (2017). High-
speed tracking-by-detection without using image in-
formation. In 2017 14th IEEE International Confer-
ence on Advanced Video and Signal Based Surveil-
lance (AVSS), pages 1–6.
Gloudemans, D. and Work, D. B. (2021). Fast vehicle
turning-movement counting using localization-based
tracking. In 2021 IEEE/CVF Conference on Computer
Vision and Pattern Recognition Workshops (CVPRW),
pages 4150–4159.
Kanaci, A., Zhu, X., and Gong, S. (2018). Vehicle re-
identification in context. In Pattern Recognition - 40th
German Conference, GCPR 2018, Stuttgart, Ger-
many, September 10-12, 2018, Proceedings.
Kuhn, H. W. and Yaw, B. (1955). The hungarian method
for the assignment problem. Naval Res. Logist. Quart,
pages 83–97.
Lu, J., Xia, M., Gao, X., Yang, X., Tao, T., Meng,
H., Zhang, W., Tan, X., Shi, Y., Li, G., and Ding,
E. (2021). Robust and online vehicle counting at
crowded intersections. In 2021 IEEE/CVF Conference
on Computer Vision and Pattern Recognition Work-
shops (CVPRW), pages 3997–4003.
Nyan, B. B., Slembrouck, M., Veelaert, P., and Philips, W.
(2020). Distributed multi-class road user tracking in
multi-camera network for smart traffic applications. In
Blanc-Talon, J., Delmas, P., Philips, W., Popescu, D.,
and Scheunders, P., editors, Advanced Concepts for
Intelligent Vision Systems (ACIVS), pages 517–528.
Springer International Publishing.
Redmon, J., Divvala, S., Girshick, R., and Farhadi, A.
(2016). You only look once: Unified, real-time ob-
ject detection. In 2016 IEEE Conference on Computer
Vision and Pattern Recognition (CVPR), pages 779–
788.
Rinner, B. and Wolf, W. (2008). An introduction to dis-
tributed smart cameras. Proceedings of the IEEE,
96(10):1565–1575.
Tran, D. N.-N., Pham, L. H., Nguyen, H.-H., Tran, T. H.-
P., Jeon, H.-J., and Jeon, J. W. (2021). A region-
and-trajectory movement matching for multiple turn-
counts at road intersection on edge device. In 2021
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition Workshops (CVPRW), pages 4082–
4089.
Wojke, N. and Bewley, A. (2018). Deep cosine metric learn-
ing for person re-identification. In 2018 IEEE Win-
ter Conference on Applications of Computer Vision
(WACV), pages 748–756. IEEE.
Wojke, N., Bewley, A., and Paulus, D. (2017). Simple on-
line and realtime tracking with a deep association met-
ric. In 2017 IEEE International Conference on Image
Processing (ICIP), pages 3645–3649.
Xu, L. and Niu, R. (2021). Tracking visual object as an ex-
tended target. In 2021 IEEE International Conference
on Image Processing (ICIP), pages 664–668.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
792
