
Brainy Home: A Virtual Smart Home and Wheelchair Control
Application Powered by Brain Computer Interface
Cihan Uyanik
1 a
, Muhammad Ahmed Khan
1 b
, Rig Das
1 c
, John Paulin Hansen
2 d
and Sadasivan Puthusserypady
1 e
1
Department of Health Technology, Technical University of Denmark, 2800 Kgs. Lyngby, Denmark
2
Department of Technology, Management and Economics, Technical University of Denmark, 2800 Kgs. Lyngby, Denmark
Keywords:
Brain Computer Interface, Virtual Smart Home, Wheelchair Control, Steady State Visual Evoked Potential.
Abstract:
In recent years, smart home applications have become imperative to improve the life quality of people, espe-
cially for those with motor disabilities. While the smart home applications are controlled with interaction tools
such as mobile phones, voice commands, and hand gestures, these may not be appropriate for people with se-
vere disabilities that impacts their motor functions, for instance locked-in-syndrome (LIS), amyotrophic lateral
sclerosis (ALS), cerebral palsy, stroke, etc. In this research, we have developed a smart home and wheelchair
control application in a virtual environment, which is controlled solely by the steady-state visual evoked po-
tential (SSVEP) based brain computer interface (BCI) system. It is a relatively low cost, easy to setup wireless
communication protocol, which offers high accuracy. The system has been tested on 15 healthy subjects and
the preliminary results comprehensively show that all the subjects completed the device interaction tasks with
approximately 100% accuracy, and wheelchair navigation tasks with over 90% accuracy. These results clearly
indicate that in future, the developed system could be used for real-time interfacing with assistive devices and
smart home appliances. The proposed system, thus may play a vital role in empowering the disabled people
to perform daily-life activities independently.
1 INTRODUCTION
Neural disorders, such as stroke, can cause long-
term or even permanent disability, resulting in detri-
mental social and economic effects. Approximately
25.7 million stroke survivors in the World (Johnson
et al., 2019) demand assistance as they suffer from
lack of interaction ability due to their physical limi-
tations. This makes them highly dependent on care-
givers, even with their daily activities on a regular day.
Thus, the development of portable and easy-to-use as-
sistive systems is crucial as well as important. Such
systems obviously may empower the disabled to live
independently.
Advancements in internet enabled devices (IoT)
have facilitated smart home systems (Del Rio et al.,
2020). Although there are numerous applications
a
https://orcid.org/0000-0003-3852-9164
b
https://orcid.org/0000-0002-8696-4227
c
https://orcid.org/0000-0001-9463-4298
d
https://orcid.org/0000-0001-5594-3645
e
https://orcid.org/0000-0001-7564-2612
within this field, almost all of them are highly de-
pendent on mobile phones or other type of inter-
action systems such as voice commands, hand ges-
tures, etc. However, people who have serious motor
control challenges (in consequence of, for example,
locked-in-syndrome (LIS), amyotrophic lateral scle-
rosis (ALS), cerebral palsy, stroke, and spinal-cord
injuries) are restricted from taking full advantage of
the available home automation technologies.
Brain computer interface (BCI) based control
methodologies, by exploiting the subjects’ electroen-
cephalogram (EEG) signals to control external de-
vices, have had significant progress in recent years.
In such systems, the target brain responses/activities
is measured and a decision-making system is imple-
mented to interact with the external devices (Mistry
et al., 2018). This allows support to people who have
difficulties to complete the tasks physically (Zhuang
et al., 2020). Development of BCI assisted devices
have greatly attracted the scientific community with
a motivation to help people who especially demands
assistance in daily tasks because of their health limi-
tations (Belkacem et al., 2020).
134
Uyanik, C., Khan, M., Das, R., Hansen, J. and Puthusserypady, S.
Brainy Home: A Virtual Smart Home and Wheelchair Control Application Powered by Brain Computer Interface.
DOI: 10.5220/0010785800003123
In Proceedings of the 15th International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2022) - Volume 1: BIODEVICES, pages 134-141
ISBN: 978-989-758-552-4; ISSN: 2184-4305
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
EEG-BCI systems are based mainly on three
paradigms: P300, motor imagery (MI), and steady-
state visual evoked potential (SSVEP). Out of these
three types, the SSVEP based systems tend to be-
come dominant in real world applications due to their
high bandwidth, minimal training time, and faster cal-
ibration (Faller et al., 2017). Additionally, the use
of external stimulus source allows to integrate mul-
tiple techniques such as augmented reality (AR), eye
tracking, etc. (Putze et al., 2019). In (Saboor et al.,
2017), the authors have developed a SSVEP-BCI sys-
tem, which was stimulated by AR glasses, and suc-
cessfully achieved over 85% accuracy on the designed
control tasks, including elevator, coffee machine and
light switches. Similarly, Park et al. (Park et al., 2020)
focused on developing a SSVEP-BCI system with an
AR head set. They reported high information transfer
rate (ITR) (37.4 bits/min), and high response rate of
activation (2.6 seconds) to turn on/off of devices. In
another study, Lin and Hsieh (Lin and Hsieh, 2014)
developed a television control system and attained al-
most 99% accuracy with 4.8 seconds command acti-
vation time. Adams et al. managed to create a smart
home application by SSVEP-BCI system to control
six devices with multiple screens placed at different
locations inside the environment, and they achieved
an average accuracy of 81% (Adams et al., 2019).
Although the aforementioned systems have ac-
complished and produced significant results, mobil-
ity is still a vital concern due to wired, bulky, effort-
demanding, and expensive setups, especially in terms
of signal acquisition tools. In this paper, we demon-
strate a novel, cost-effective, user friendly, and easy
to setup wireless SSVEP-BCI control of smart home
and wheelchair application through a virtual environ-
ment.
2 MATERIALS AND METHODS
2.1 SSVEP-BCI and Data Acquisition
Setup
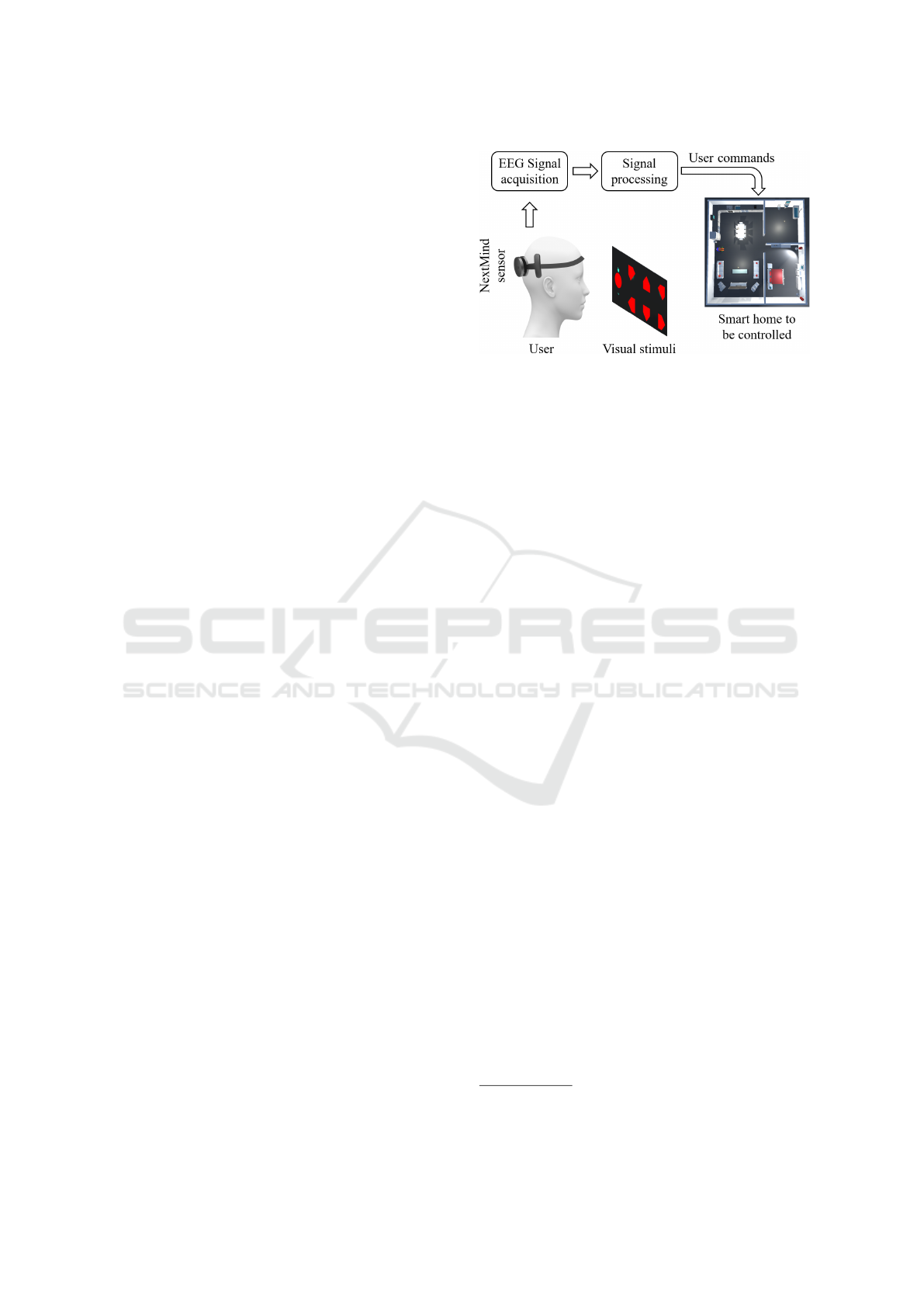
In SSVEP-BCI systems, a visual stimuli is responsi-
ble to present visual triggers, and each of them has
unique frequencies. When a user concentrate on one
of these visual triggers (named as flickering patterns),
a neural activation uniquely matching the focused pat-
tern occurs in the visual cortex of the user. These
neural activation is measurable via EEG acquisition
device, and the acquired signal could be processed to
decode the generated unique signature. If any visual
pattern is dedicated to perform an action based on the
Figure 1: Schematic of SSVEP-BCI system.
current state of the controlled system/environment, an
accurate signal analysis scheme produces the correct
user commands. The described procedure is depicted
in Figure 1.
For the development of a user-friendly and
portable BCI system for smart home and wheelchair
control application, the selection of a simple and ro-
bust EEG acquisition system is of utmost importance.
For this, we used the NextMind SSVEP-BCI device,
which is non-invasive, compact and has nine high
quality dry electrodes covering the visual cortex area
of the brain. It contains Bluetooth communication
module that wirelessly transmits the acquired EEG
signals to the computing unit. The computer acts as
a main processing unit that is responsible to run a
3D simulation environment, receive and analyze EEG
signals, determine focused control pattern, and record
experimental data.
2.2 3D Environment for Control
Application
Smart home and wheelchair control environment are
developed (Figure 2a) in Unity 3D Game Engine
1
.
The environment contains a wheelchair and various
types of daily life home appliances which are con-
trolled by the user with the BCI setup. This BCI setup
contains the NextMind device and SSVEP based in-
put screen installed on the wheelchair (Figure 2b).
More details on the developed smart home environ-
ment and wheelchair can be found at the provided
video link
2
.
Implementation of system software for wheelchair
and smart home appliances are completed in C# pro-
gramming language, which is one of the officially
supported development languages of Unity Engine.
System software architecture is depicted in Figure 3.
1
https://unity.com/
2
https://youtu.be/PqelTCLJ77U
Brainy Home: A Virtual Smart Home and Wheelchair Control Application Powered by Brain Computer Interface
135
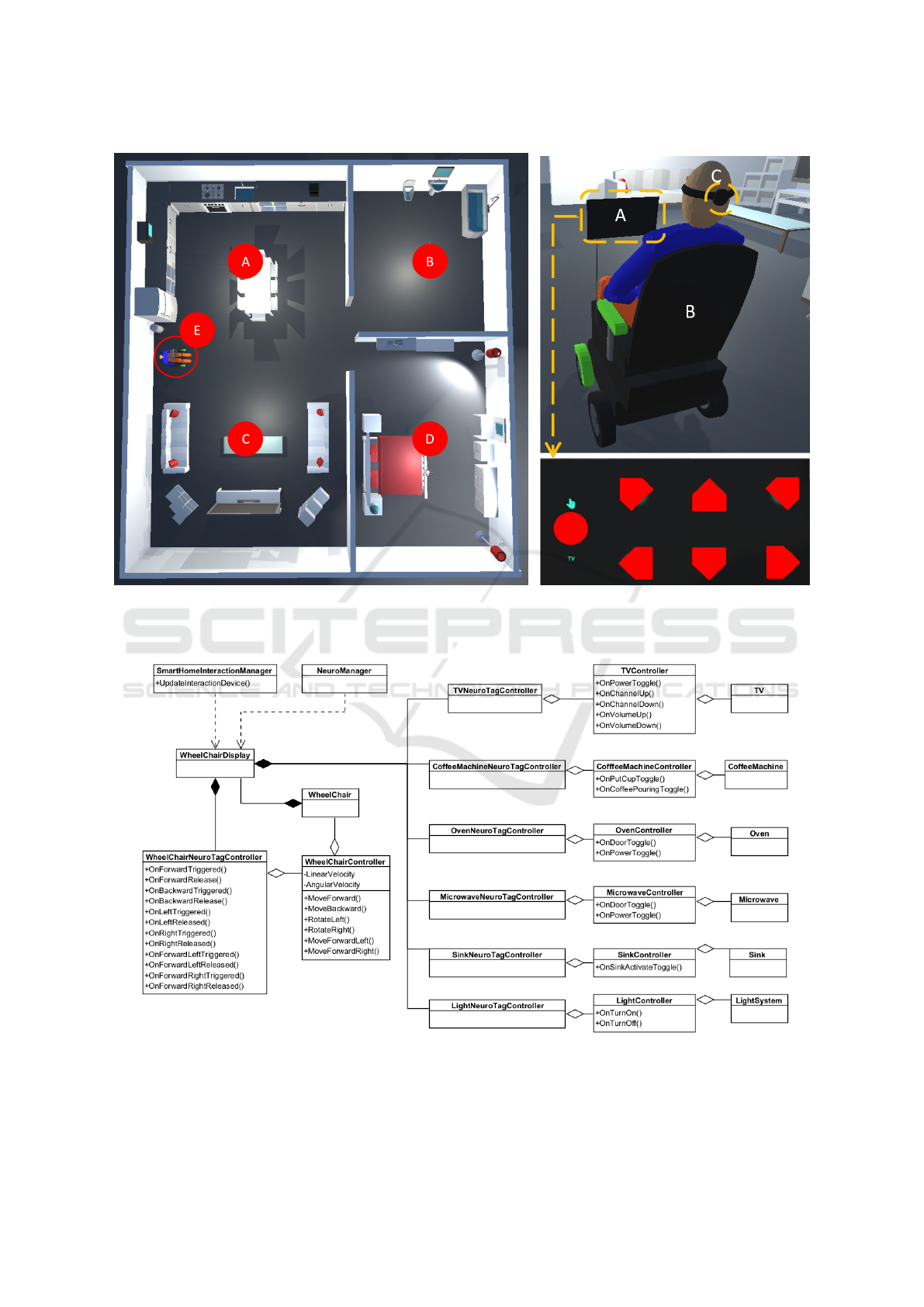
(a) (b)
Figure 2: (a): Smart home environment (A: Kitchen, B: Bathroom, C: Living room, D: Bedroom, E: Subject on the wheelchair
with NextMind device), (b): Wheelchair and subject (A: Control display, B: Wheelchair, C: NextMind device).
Figure 3: Software architecture of the smart home and wheelchair control system.
BIODEVICES 2022 - 15th International Conference on Biomedical Electronics and Devices
136

In order to preserve simplicity of the diagram, only
the most important classes and their crucial function-
alities are demonstrated in the class blocks.
As seen from the class diagram, all smart home
environment appliances and wheelchair are controlled
by WheelChairDisplay, which is the primary inter-
action device of the user, who wears the NextMind
SSVEP-BCI acquisition device. SmartHomeInterac-
tionManager is responsible to keep the control dis-
play valid in terms of available interaction patterns.
When the wheelchair is close to a BCI controllable
appliance (television, coffee machine etc.), it forces
the display to show a sub-control menu selection pat-
tern as shown in Figure 2b.
When the subject focuses on a control pattern (red
patterns on display) to start an action, NeuroMan-
ager triggers the corresponding NeuroTagController
such as the WheelChairNeuroTagController, and the
TVNeuroTagController. Finally, the input signal for
relevant device controller (WheelChairCintroller, TV-
Controller) are delivered, and the demanded action by
the user (via brain signals) is performed by the device.
2.3 Participants
Fifteen healthy control subjects (three females and
twelve males with a mean age of 30 ± 8) voluntar-
ily participated in the experiments. Two of them have
prior experience with the BCI systems, and the rest of
them are na
¨
ıve.
2.4 Experimental Design and
Procedures
Three sets of experiments are designed to test the sub-
jects’ performance for controlling smart home appli-
ances and wheelchair navigation in the virtual envi-
ronment via the BCI system. In each trial of an exper-
iment, the ultimate expectation from a participant is
to complete the active trial as fast as possible. All ex-
periments consist of wheelchair navigation task com-
bined with a device control task. While subjects are
conducting experiments, their focus states on naviga-
tion patterns, corresponding wheelchair motions, ex-
ternal device control focus commands and relevant
timing information are recorded for further analysis.
2.4.1 Experiment 1
This is the simplest of all 3 experiments. The objec-
tive is to move the wheelchair into the bedroom by fo-
cusing navigation control patterns located on the dis-
play (see Figure 2b). Figure 4 shows a completed trial
and wheelchair’s path. Transparent spheres shown in
the figure indicate subsection waypoints of the trial.
In addition to the navigation task, the subject must
turn on bedroom light when the related control pat-
tern appears on the control display. In a real-life smart
home, this would be implemented by position-based
proximity interaction (Ballendat et al., 2010). This
extra interaction task is considered as an added dis-
traction and increases the complexity of the overall
trial. Video demonstration of this experiment is pro-
vided in
3
.
2.4.2 Experiment 2
In experiment 2, the user has to complete a relatively
complex navigation task, which has three waypoints
as shown in Figure 5a. At the end of the naviga-
tion task, subject must do a coffee machine interaction
task as shown in Figure 6a. In order to complete this
task, the subject must focus on the patterns in the or-
der of B-C-C-B-A. This experiment is demonstrated
in
4
.
2.4.3 Experiment 3
It is the most complicated one, having series of navi-
gation control actions. The tracking path starts from
the same location as in the first and second experi-
ments, and ends in front of the television. In this task
(Figure 5b), the path contains eight waypoints which
must be visited. Upon completing the navigation task,
a television interaction task (shown in Figure 6b) is
presented to the subject. The expected control order
must be B-D-F-E-C-B-A. Detailed demonstration of
this experiment can be found in
5
.
3 RESULTS AND DISCUSSION
The experiments are repeated 3 times for each sub-
ject, and the trials are recorded to analyze the over-
all system performance for each subject. Task com-
pletion time (TCT(s)) and task commanding success
(TCS(%)) constitute the evaluation basis of the exper-
iments.
3.1 Task Completion Time and
Closeness
For a subject carrying out one of the experiments, the
average of trials’ duration is the TCT, which are pro-
vided in Tables 1 and 2.
3
https://youtu.be/C3He41Whems
4
https://youtu.be/lmdQogPShT8
5
https://youtu.be/I2jeTJEY8eo
Brainy Home: A Virtual Smart Home and Wheelchair Control Application Powered by Brain Computer Interface
137
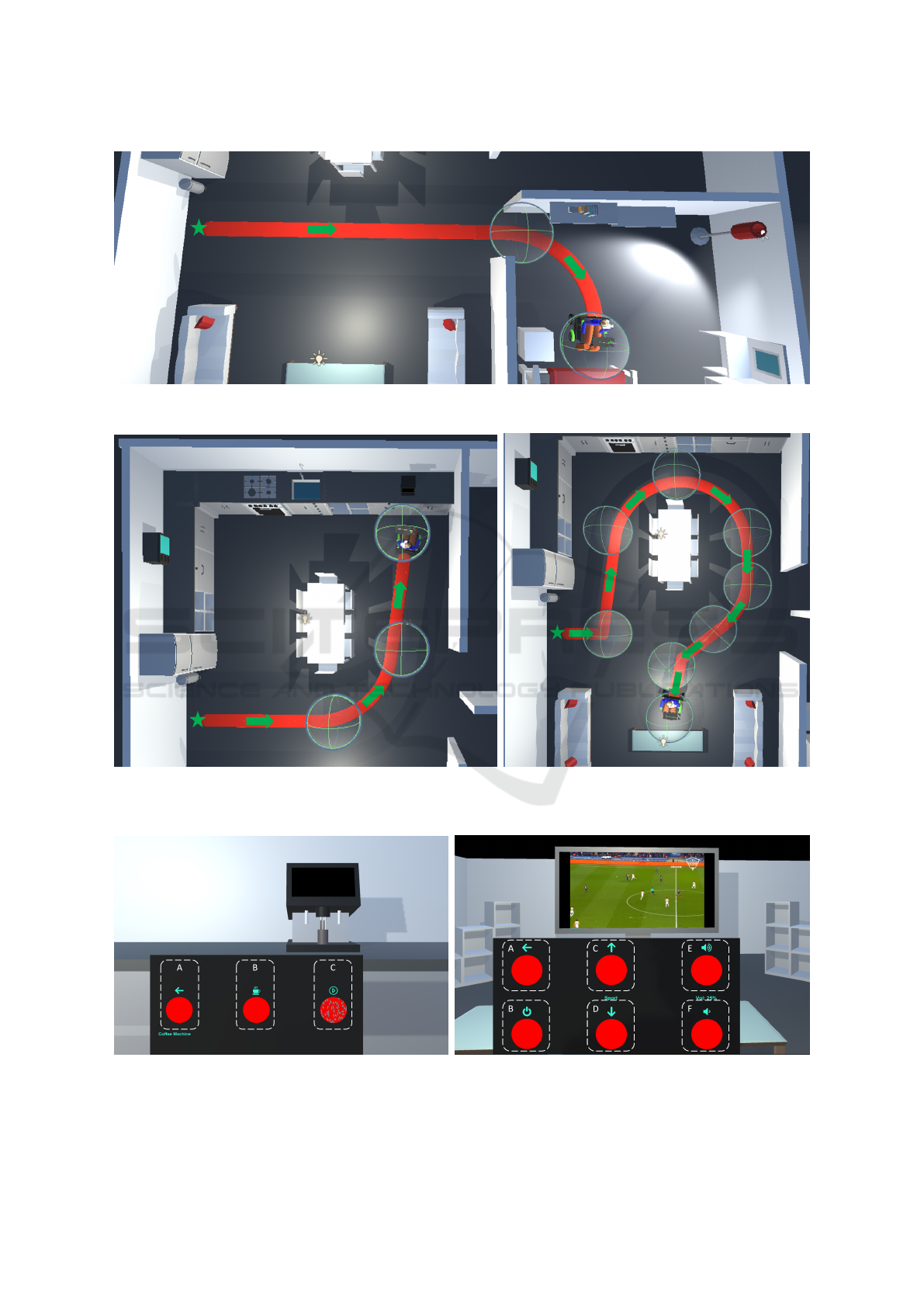
Figure 4: Experiments 1 navigation task (Spheres: Internal waypoints, Red lines: Motion trajectory, Green Arrows: Move-
ment direction).
(a) (b)
Figure 5: (a) and (b): Experiments 2 and 3 navigation tasks (Spheres: Internal waypoints, Red lines: Motion trajectory, Green
Arrows: Movement direction).
(a) (b)
Figure 6: (a): Experiment 2 Interaction task - Coffee machine (A: Return to wheelchair navigation control, B: Put/Remove
coffee mug onto/from the tray, C: Start/Stop filling coffee and milk). (b): Experiment 3 Interaction task - Television (A:
Return to wheelchair navigation control, B: Power On/Off Television, C/D: Next/Previous channel, E/F: Volume Up/Down).
BIODEVICES 2022 - 15th International Conference on Biomedical Electronics and Devices
138
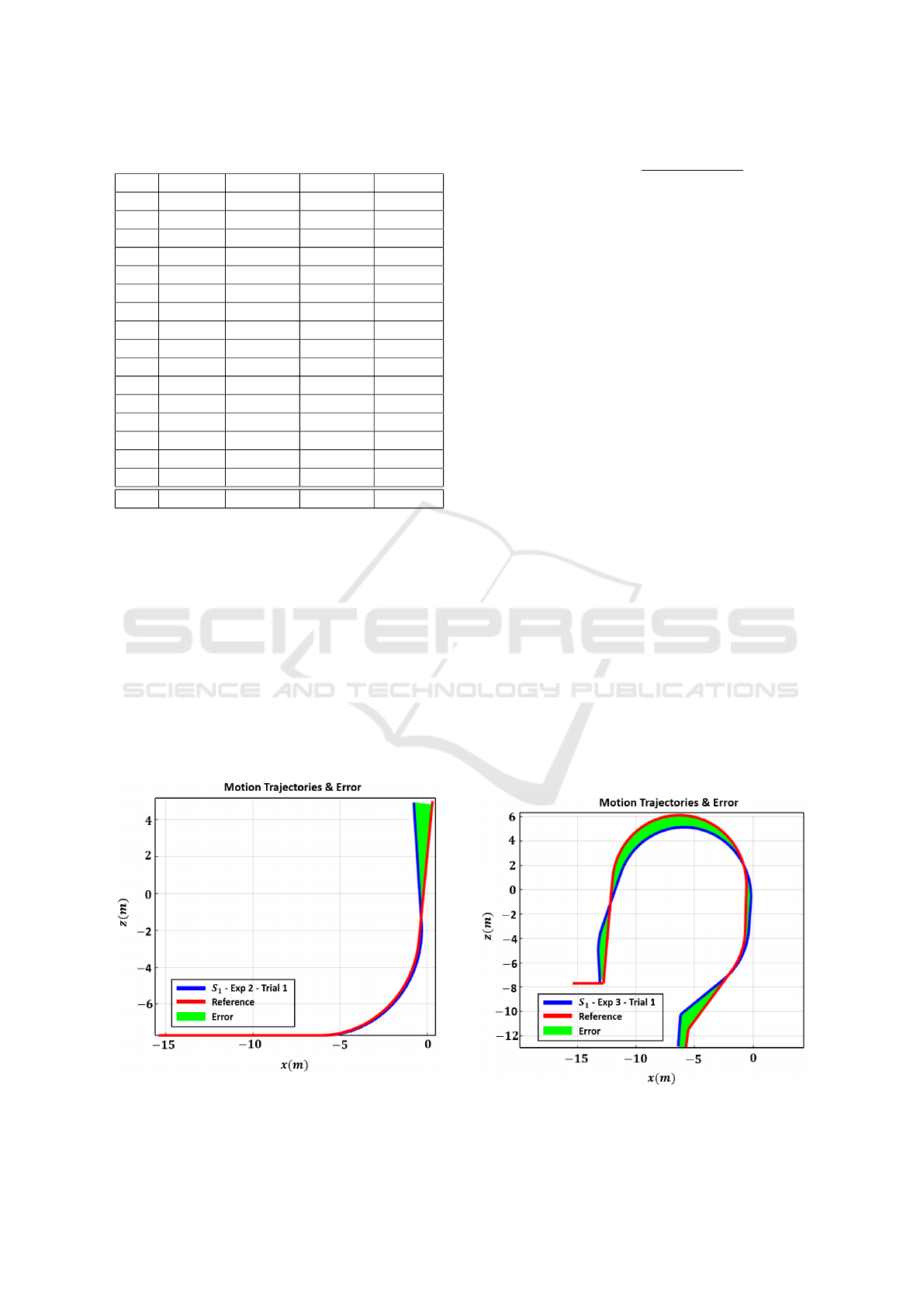
Table 1: Results for Experiment 1.
TCT(s) CLS(%) TCS(%) E
traj
(m)
R 33.4 - - -
S
1
34.5 96.6 97.8 0.15
S
2
35.5 93.4 97.9 0.15
S
3
35.8 92.8 98.6 0.19
S
4
36.8 89.7 97.8 0.15
S
5
39.0 83.1 99.7 0.09
S
6
37.7 87.0 97.8 0.15
S
7
35.0 95.0 97.4 0.20
S
8
38.7 83.8 99.3 0.20
S
9
37.0 88.9 97.8 0.16
S
10
36.7 89.8 97.8 0.15
S
11
33.9 98.3 99.3 0.24
S
12
43.9 68.4 97.1 0.29
S
13
33.6 99.2 98.5 0.20
S
14
36.2 91.6 98.8 0.06
S
15
37.9 86.5 99.3 0.19
Avg 36.8 89.6 98.3 0.17
In order to obtain the reference baseline, the ex-
periments are conducted by using a computer mouse
control instead of BCI. In the following experimental
trials, the user related delay is minimized due to low
delay time of the mouse, which yields the lowest pos-
sible TCT. These trials are the comparison reference
(R) of a subject’s performance in terms of TCT, and
given at the first rows of the result tables.
Closeness (CLS(%)) is the measurement of how a
subject’s timing is close to the reference (R) timing
in a given experiment. It is calculated using Eq.(1),
where TCT
s,e
is the TCT for a given subject, s for the
experiment, e. TCT
R,e
is the TCT for the reference R
for the corresponding experiment, e.
Figure 7: Motion trajectories and corresponding trajectory
errors for S
1
in experiment 2.
CLS(s, e) = 1 −
TCT
s,e
− TCT
R,e
TCT
R,e
. (1)
From the experiment results, it can be seen that
majority of the subjects completed wheelchair nav-
igation tasks over 80% closeness, except S
12
in the
first experiment (Table 1), S
5
, S
8
in the second exper-
iment (Table 2, top block), and S
4
, S
8
, S
9
in the third
experiment (Table 2, bottom block). It is noted that
S
1
and S
6
both have consistency in having high close-
ness ratios with small fluctuations over experiments.
It is due to the fact that both of them have experi-
ence in using the NextMind device, and hence the en-
vironmental factors (distractions) have less influence
on them compared to the other subjects. Another im-
portant observation from the results is regarding the
device interaction tasks for inexperienced users (in
the second and third experiments). A huge improve-
ment on TCT (eventually closeness percentage) is ob-
served from the second interaction task (coffee ma-
chine) to the third interaction task (television), even
though the television control task is more complicated
than coffee machine control task. The reason behind
this can be attributed to the fact that each subject be-
comes more trained on the smart home environment
by the time they perform the television control task.
These observations prove that an inexperienced sub-
ject can complete the given task with high closeness
value, with a very limited amount of training on the
presented environment.
3.2 Task Commanding Success
While a subject is conducting one of the experiment’s
trial, he/she should follow the predefined focus pat-
terns to complete the task. At a given point of time, if
Figure 8: Motion trajectories and corresponding trajectory
errors for S
1
in experiment 3.
Brainy Home: A Virtual Smart Home and Wheelchair Control Application Powered by Brain Computer Interface
139
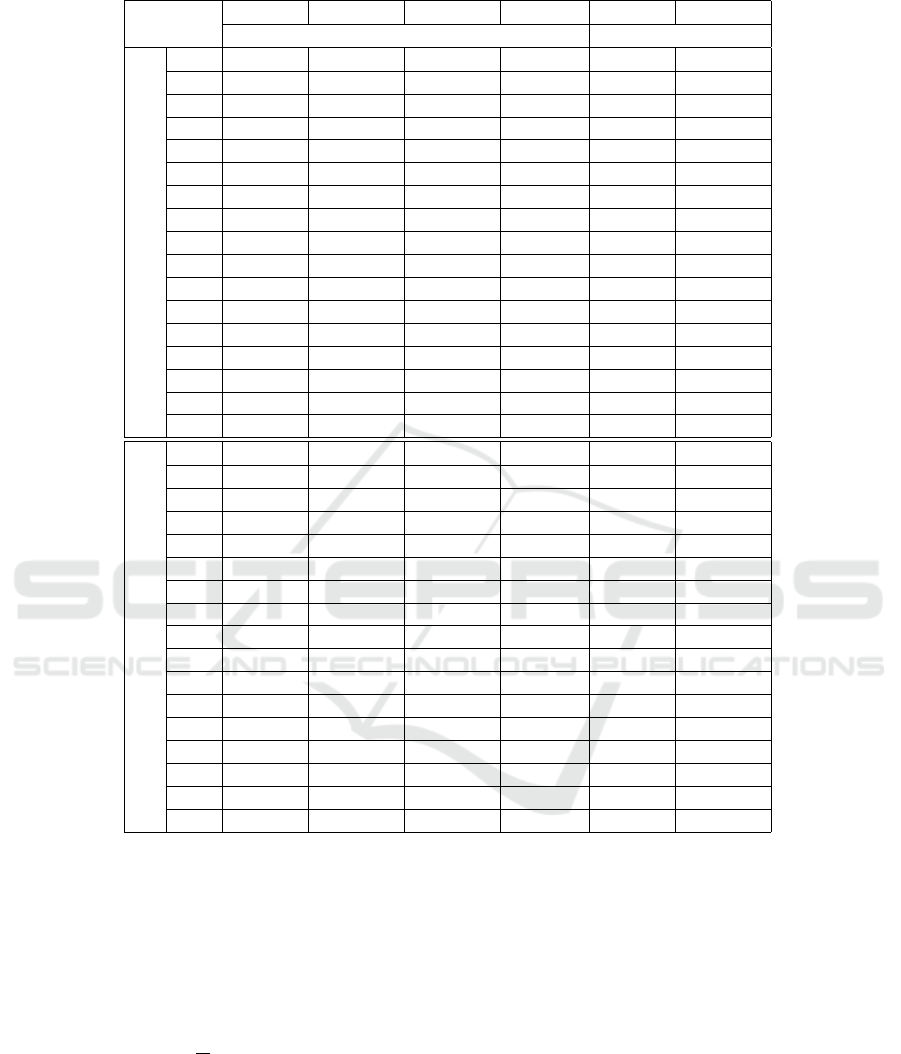
Table 2: Experimental results for experiment 2 and 3 navigation and interaction tasks.
TCT(s) CLS(%) TCS(%) E
traj
(m) TCT(s) CLS(%)
Navigation Interaction
Experiment 2
R 28.1 - - - 15.9 -
S
1
30.0 93.3 97.6 0.17 16.1 98.5
S
2
30.9 89.8 93.0 0.16 17.7 88.5
S
3
28.6 98.1 98.3 0.15 16.8 94.3
S
4
28.9 97.2 94.1 0.17 19.9 74.3
S
5
36.9 68.8 96.8 0.17 20.8 68.5
S
6
32.0 86.0 97.7 0.18 17.9 86.8
S
7
32.3 85.0 92.1 0.15 18.9 81.0
S
8
35.5 73.6 95.2 0.18 19.2 78.9
S
9
29.3 95.6 97.7 0.18 16.9 93.1
S
10
28.8 97.6 98.1 0.19 18.2 85.0
S
11
28.6 98.3 97.6 0.17 18.6 83.0
S
12
30.5 91.5 98.5 0.22 19.1 79.3
S
13
29.5 95.0 97.7 0.17 18.0 86.3
S
14
28.1 99.8 92.4 0.22 17.4 90.2
S
15
30.8 90.4 98.5 0.14 17.3 90.7
Avg 30.7 90.7 96.4 0.17 18.2 85.2
Experiment 3
R 67.5 - - - 20.9 -
S
1
72.2 93.0 94.2 0.49 21.6 96.8
S
2
72.3 92.7 91.2 0.87 23.2 89.3
S
3
78.1 84.2 92.7 1.12 22.6 92.1
S
4
82.5 77.8 95.2 0.69 21.0 99.5
S
5
77.7 84.8 95.7 1.04 21.0 99.7
S
6
73.5 91.0 95.4 1.26 21.1 99.1
S
7
77.1 85.6 89.5 0.74 22.5 92.4
S
8
88.0 69.5 90.5 0.78 22.6 91.8
S
9
85.5 73.2 95.0 1.21 21.2 98.8
S
10
74.2 90.0 94.8 1.17 21.4 97.8
S
11
73.4 91.2 93.4 1.26 21.3 98.5
S
12
80.9 80.0 96.1 1.13 21.8 95.8
S
13
75.3 88.3 93.5 1.42 21.6 97.0
S
14
77.5 85.2 94.2 1.20 21.4 97.8
S
15
80.1 81.2 96.9 1.10 21.9 95.2
Avg 77.9 84.5 93.9 1.03 21.7 96.1
the subject focuses on a control pattern other than the
required one, commanding error occurs, which can
be computed as the TCS (Eq.(2)). C
f ail
(t) in Eq.(2) is
the command error function. The C
f ail
(t) value is 1 if
the focused pattern is different than the expected one,
otherwise, it is 0 at a given time, t. T is the total time
when the wheelchair in motion for a navigation task.
TCS = 1 −
1
T
Z
T
0
C
f ail
(t)dt. (2)
TCS for navigation tasks (on each experiment) of
all subjects is over 90%. As expected, the perfor-
mance of each subject decreases as the complexity
level of navigation task increases. When the number
of commands is increased, the probability of perform-
ing wrong navigation action is increased (Table 1 and
2). Surprisingly, none of the subjects failed on any
of the interaction tasks, which yields a 100% success
rate. Thus, the result indicates that the developed BCI
controlled smart home application can be used by dis-
abled users to interact with the devices with high trust
level.
3.3 Trajectory Error
The wheelchair navigation tasks have predefined mo-
tion paths which must be followed. While subject
navigates the wheelchair, its positions are recorded.
Trajectory error (E
tra j
) corresponds to the average
distance error over time to the expected motion
path. It shows the subject performance on driv-
ing wheelchair in terms of geometric distance (see
BIODEVICES 2022 - 15th International Conference on Biomedical Electronics and Devices
140

E
tra j
(m) in Tables 1 and 2). It is calculated as shown
in Eq.(3), where U (t) is the wheelchair actual posi-
tion function over time, and R
cp
(U(t)) is a function
that determines the closest position on reference tra-
jectory from wheelchair position (see Figures 7 and
8). In Eq.(3), T is the total amount of time while the
wheelchair is performing the navigation tasks.
E
tra j
=
1
T
Z
T
0
|U(t) − R
cp
(U(t))|dt. (3)
According to the results, subjects’ average navi-
gation trajectory errors for experiments 1 and 2 are
quite low (less than 20cm). However, in the third ex-
periment, the error values increase considerably due
to the complexity of the navigation path. The ob-
tained error values confirm that all the subjects are
able to navigate wheelchair on the allocated motion
path with an average error of less than the width of a
typical wheelchair.
4 CONCLUSION
In this paper, a SSVEP-BCI controlled smart home
and wheelchair application developed in Unity 3D
Game and Simulation Engine is presented. The
system has advantage of being low-cost, wireless,
portable, easy to use, and most importantly has high
control accuracy without extensive training require-
ment. Experiments conducted on 15 control subjects
show that all could complete the presented tasks with
high success rates. It is also observed that the sub-
jects’ confidence and competence to control the sys-
tem increases after each trial, even within the lim-
ited time of experimental proceedings. Moreover, the
results clearly show that our system is considerably
easy to adapt and learn by users. Preliminary testing
on subjects in the virtual environment shows promis-
ing results, which supports the feasibility of the sys-
tem for real-time device control applications in future
smart homes.
ACKNOWLEDGEMENTS
The authors would like to thank all the participants
who volunteered to participate in the experiments.
REFERENCES
Adams, M., Benda, M., Saboor, A., Krause, A. F., Rezeika,
A., Gembler, F., Stawicki, P., Hesse, M., Essig, K.,
Ben-Salem, S., et al. (2019). Towards an ssvep-bci
controlled smart home. In 2019 IEEE International
Conference on Systems, Man and Cybernetics (SMC),
pages 2737–2742. IEEE.
Ballendat, T., Marquardt, N., and Greenberg, S. (2010).
Proxemic interaction: designing for a proximity and
orientation-aware environment. In ACM International
Conference on Interactive Tabletops and Surfaces,
pages 121–130.
Belkacem, A. N., Jamil, N., Palmer, J. A., Ouhbi, S., and
Chen, C. (2020). Brain computer interfaces for im-
proving the quality of life of older adults and elderly
patients. Frontiers in Neuroscience, 14.
Del Rio, D. D. F., Sovacool, B. K., Bergman, N., and
Makuch, K. E. (2020). Critically reviewing smart
home technology applications and business models in
europe. Energy Policy, 144:111631.
Faller, J., Allison, B. Z., Brunner, C., Scherer, R., Schmal-
stieg, D., Pfurtscheller, G., and Neuper, C. (2017). A
feasibility study on ssvep-based interaction with mo-
tivating and immersive virtual and augmented reality.
arXiv preprint arXiv:1701.03981.
Johnson, C. O., Nguyen, M., Roth, G. A., Nichols, E.,
Alam, T., Abate, D., Abd-Allah, F., Abdelalim, A.,
Abraha, H. N., Abu-Rmeileh, N. M., et al. (2019).
Global, regional, and national burden of stroke, 1990–
2016: a systematic analysis for the global bur-
den of disease study 2016. The Lancet Neurology,
18(5):439–458.
Lin, J.-S. and Hsieh, C.-H. (2014). A bci control system for
tv channels selection. International Journal of Com-
munications, 3:71–75.
Mistry, K. S., Pelayo, P., Anil, D. G., and George, K. (2018).
An ssvep based brain computer interface system to
control electric wheelchairs. In 2018 IEEE Interna-
tional Instrumentation and Measurement Technology
Conference (I2MTC), pages 1–6. IEEE.
Park, S., Cha, H.-S., Kwon, J., Kim, H., and Im, C.-H.
(2020). Development of an online home appliance
control system using augmented reality and an ssvep-
based brain-computer interface. In 2020 8th Interna-
tional Winter Conference on Brain-Computer Inter-
face (BCI), pages 1–2. IEEE.
Putze, F., Weiβ, D., Vortmann, L.-M., and Schultz, T.
(2019). Augmented reality interface for smart home
control using ssvep-bci and eye gaze. In 2019 IEEE
International Conference on Systems, Man and Cy-
bernetics (SMC), pages 2812–2817. IEEE.
Saboor, A., Rezeika, A., Stawicki, P., Gembler, F., Benda,
M., Grunenberg, T., and Volosyak, I. (2017). Ssvep-
based bci in a smart home scenario. In Inter-
national Work-Conference on Artificial Neural Net-
works, pages 474–485. Springer.
Zhuang, W., Shen, Y., Li, L., Gao, C., and Dai, D. (2020). A
brain-computer interface system for smart home con-
trol based on single trial motor imagery eeg. Interna-
tional Journal of Sensor Networks, 34(4):214–225.
Brainy Home: A Virtual Smart Home and Wheelchair Control Application Powered by Brain Computer Interface
141
