
DeepPupil Net: Deep Residual Network for Precise Pupil Center
Localization
Nikolaos Poulopoulos
a
and Emmanouil Z. Psarakis
b
Department of Computer Engineering & Informatics, University of Patras, Greece
Keywords:
Eye Localization, Eye Tracking, Deep Neural Networks, Deep Learning, Fully Convolutional Network (FCN).
Abstract:
Precise eye center localization constitutes a very promising but challenging task in many human interaction
applications due to many limitations related with the presence of photometric distortions and occlusions as well
as pose and shape variations. In this paper, a Fully Convolutional Network (FCN), namely DeepPupil Net is
proposed to localize precisely the eye centers by performing image-to-heatmap regression between the eye
regions and the corresponding heatmaps. Moreover, a new loss function is introduced in order to incorporate
into the training process the predicted eye center positions and penalize inaccurate localizations. The proposed
method achieves real-time performance in a general-purpose computer environment and outperforms in terms
of accuracy the state-of-the-art eye center localization techniques.
1 INTRODUCTION
Nowadays, human-computer interaction (HCI) is of
growing interest due to the penetration of computer
systems in every aspect of everyday life. This
progress requires new input modalities except from
the traditional devices (keyboards, mousses, touch
surfaces, sensors, etc.) with the eye gaze to constitute
a revolutionary approach to interact without physical
contact. The most characteristic features of the hu-
man face constitute the eyes as they provide signifi-
cant information for the emotional and cognitive hu-
man state. Moreover, eye centers’ location per se can
be exploited in applications such as face alignment,
face recognition, control devices for disabled people,
user attention and gaze estimation (e.g., driving and
marketing) (Kar and Corcoran, 2017; Krafka et al.,
2016).
Despite the active research in this field, the accu-
racy of such eye center localization systems has room
for improvement and usually downgraded by many
limitations. The main challenges are related to the
wide variety of human eye colors and shapes, the eye
states (open or closed), the facial expressions and ori-
entations etc. Moreover, the presence of occlusions
from hair and glasses, reflections and shadows as well
as poor lighting and low image resolution further de-
a
https://orcid.org/0000-0002-8341-9805
b
https://orcid.org/0000-0002-9627-0640
grades the localization accuracy. Accurate eye center
localization becomes even more challenging where
the low complexity is substantial for incorporating
in real-time applications (Poulopoulos and Psarakis,
2018).
End-to-end deep neural network learning consti-
tutes a state-of-the-art approach for solving several
problems and has attracted recently the interest of sci-
entific community. In this paper, we introduce a novel
network, called DeepPupil Net, that tries to solve the
eye localization problem in an end-to-end way. An
encoder-decoder based architecture is proposed to lo-
calize precisely the eye centers by performing image-
to-heatmap regression between the eye regions and
the corresponding heatmaps. Moreover, a new loss
function is introduced in order to incorporate into the
training process the predicted positions of the corre-
sponding eye centers. In this way we succeed to im-
prove the accuracy of the eye center localizer, over-
coming the aforementioned limitations. The main
contributions of this work are summarized as follows:
• A novel end-to-end architecture for precise eye
center localization.
• A new loss function that penalizes inaccurate lo-
calizations during training.
• Enhanced accuracy over the state-of-the-art meth-
ods in three publicly available databases.
Poulopoulos, N. and Psarakis, E.
DeepPupil Net: Deep Residual Network for Precise Pupil Center Localization.
DOI: 10.5220/0010777900003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 5: VISAPP, pages
297-304
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
297

2 RELATED WORK
Eye center localization methods working under chal-
lenging conditions can be categorized into the follow-
ing broad classes:
• Feature based methods and
• Appearance based methods.
Feature-based methods exploit the special form of the
eye structure and detect the eye centers by applying
appropriate filters based on shape, geometry, sym-
metry and color. The obtained features are robust to
shape and scale variances and don’t require any ma-
chine learning techniques. Valenti et al. (Valenti and
Gevers, 2008) introduced a voting process based on
isophote curvatures for localizing the eye centers. Ra-
dial symmetry operators, trying to highlight the cir-
cularity of the iris, have also attracted much popu-
larity for the automatic eye center localization (Loy
and Zelinsky, 2003; Skodras and Fakotakis, 2015).
In (Poulopoulos and Psarakis, 2017; Poulopoulos and
Psarakis, 2018) a Modified Fast Radial Symmetry
Transform (MFRST) was proposed. It emphasizes on
the shape of the iris and combines the edge informa-
tion that results from an edge-preserving filtering and
the intensity information, in order to find shapes with
high radial symmetry.
Appearance-based methods incorporate the holis-
tic eye and its surrounding appearance to a prior
model and perform eye center localization by fit-
ting this trained model. For this purpose, many ma-
chine learning algorithms have been proposed such as
Bayesian (Everingham and Zisserman, 2006), support
vector machines (SVM) (Campadelli et al., 2009) and
AdaBoost (Niu et al., 2006). Deep CNNs have also
achieved several improvements over the last years.
U-Net (Ronneberger et al., 2015) is a Fully Convo-
lutional Network (FCN) with an encoder-decoder like
architecture and skip connections between the encod-
ing and decoding parts, developed for biomedical im-
age segmentation. ResNet (He et al., 2016) introduces
the idea of “identity connections” that skip one or
more layers and ensures that deeper networks don’t
produce training errors higher than their shallower
counterparts. Xia et al. (Xia et al., 2019) proposed
a heatmap based approach to localize the eye centers
using a properly trained shallow FCN with a large ker-
nel convolutional block. In (Choi et al., 2020) and
(Lee et al., 2020) a deep FCN pipeline is proposed
using heterogenous CNN models trained to detect the
face, remove the eye glasses, extract the facial land-
marks and finally localize the eye centers. PupilTAN
(Poulopoulos et al., 2021) is a few-shot adversarial
training framework that performs image-to-heatmap
translation for precise eye localization.The main idea
is to train this model using an adversarial loss be-
tween the model outputs and random heatmaps sam-
pled from a prior distribution which is learned from
only few ground-truth. This adversarial loss aligns the
output and prior distributions, thereby enabling “un-
supervised” pupil localization.
3 PROPOSED TECHNIQUE
In this section, we describe in detail the proposed
CNN architecture as well as the training scheme used
for achieving our goal. To this end let us consider the
following set of training images:
I
= {I
k
)}
K
k=1
. (1)
with each member of this set constituting a realization
of a random variable with known pd f , i.e. I ∼ f
I
.
3.1 Preprocessing
The conversion of an eye center localization to an
image-to-heatmap regression problem requires an ap-
propriate preprocessing of the input images and the
ground-truth. To this end, in every image of the
training set, firstly the face is detected and the two
eye Regions of Interest (RoIs) are selected based on
the face geometry (Poulopoulos and Psarakis, 2017;
Poulopoulos and Psarakis, 2018). Then, every eye
RoI is resized to 64x96 pixels and transformed to
grayscale in order to feed the input of the proposed
network. Moreover, we transform the ground-truth
coordinates into a Gaussian kernel based heatmap
with equal size as the input image I, i.e:
H
G
(x, I) = e
−
||x−x
c
(I)||
2
2
2σ
2
(2)
where, x the image pixel coordinates, x
c
(I) the
ground-truth eye center coordinates of the image I of
the training set, ||x||
2
the l
2
norm of vector x and σ
the standard deviation of the kernel that determines
the width of the heatmap. We set the hyperparameter
σ = 7, which achieves the best results in our experi-
ments.
3.2 Network Architecture
The proposed network can fully exploit hierarchi-
cal feature representations and reconstruct the corre-
sponding spatial heat maps. The entire network ar-
chitecture summarized in Figure 1, consists of the en-
coding and decoding parts. The encoder comprises
a pyramid structure of residual blocks to extract dis-
tinct geometry information in various scales. Resid-
ual blocks are used to prevent accuracy degradation
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
298
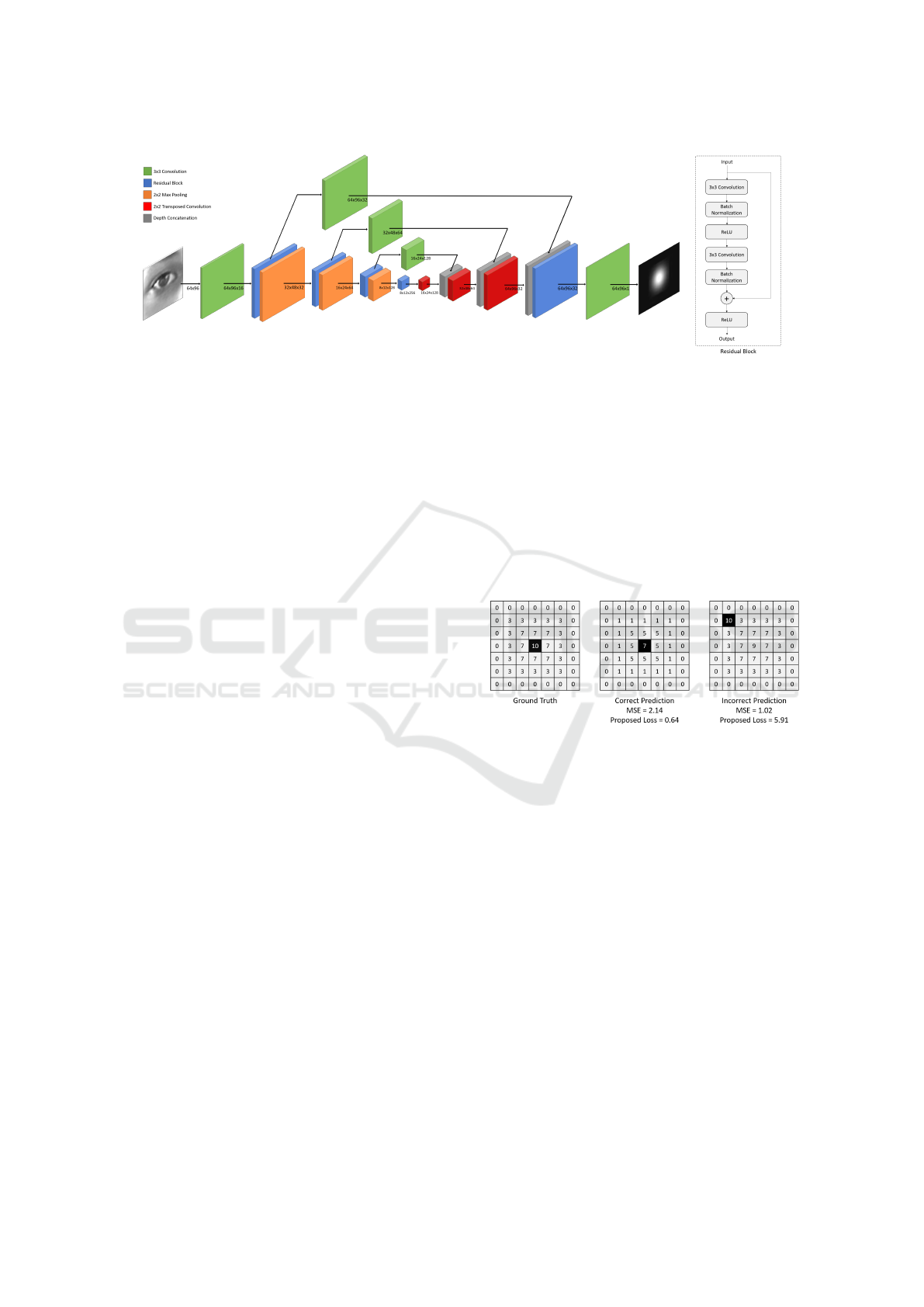
Figure 1: DeepPupil Net (a) and Residual block (b) architecture.
when the network gets deeper. Each block consists of
two convolutional layers followed by a batch normal-
ization and a rectified linear layer as shown in Figure
1.(b). In order to down-sample the feature maps and
increase the receptive field of the net, each residual
block is followed by a max-pooling layer. The num-
ber of kernels after each stage doubles in order the net
to be able to learn the complex structures effectively.
The decoder up-samples the feature maps on differ-
ent scales using transposed convolutions. The num-
ber of kernels after each stage is reduced by a factor
of two and the layers are concatenated with the cor-
responding ones from the encoder. Skip connections
with convolutional layers are used between each stage
of the encoder and decoder, allowing feature maps
from the expanding part to be fused with the sym-
metric feature maps from the down-sampling part.
This helps the model to produce a very accurate re-
sult by combining the semantic information from the
deeper layers with the appearance information from
the shallower layers and compensate the information
loss caused by the max-pooling operations. Finally,
the decoding part is followed by a one-channel con-
volution layer in order to aggregate better multi-scale
information and obtain the final regression map. The
network predicts a heat map for every input image
that corresponds to the per-pixel confidence of the lo-
cation of the eye center. The resulting output will
have equal spatial dimensions as the original image.
The position of the maximum of the prediction corre-
sponds to the predicted eye center coordinates.
3.3 Proposed Loss Function
Mean-square-error (MSE) loss, which is the most
common loss function used in heatmap matching, op-
timizes the pixel-wise similarity between the network
predictions and the ground-truth heatmaps. However,
MSE constitutes an indirect way to optimize the pre-
dicted eye center positions because the model ignores
the fact that the coordinate predictions finally result
from the positions of the maximum heatmap values.
Thus, minimizing the MSE between the predictions
and the ground-truth heatmaps doesn’t guarantee an
improvement in the localization accuracy. Such a case
is illustrated in Figure 2, where the MSE improve-
ment leads to a heavy degradation of the localization
accuracy. It is clear that, the prediction with the cor-
rect maximum location has worse MSE than an al-
most perfectly matching heatmap with the brightest
pixel placed incorrectly.
Figure 2: MSE reduction may worsen the localization. Pro-
posed Loss addresses this by penalizing the inaccurate lo-
calizations.
To overcome this problem, we penalize inaccurate
localization results during training by introducing the
proposed Loss function which is composed by two
terms defined as follows:
L
h
(I, θ) = ||H
G
(x, I)− H
P
(x, I, θ)||
2
2
(3)
L
c
(I, θ) = ||x
c
(I) − argmax
x∈X
H
P
(x, I, θ)||
2
2
(4)
where H
G
(x, I) and H
P
(x, I, θ) the ground truth and
predicted heatmaps respectively, θ the network pa-
rameter vector and argmax
x∈X
f (x) the operator that re-
turns the location where function f (x) attains its
maximum value. Thus, the term L
h
(I, θ) forces the
network to learn the real heatmaps, while the term
L
c
(I, θ) forces the network to correct the inaccurate
localizations derived from the estimated heatmaps.
Then, we can use the convex combination of the
above defined terms to define the following loss func-
DeepPupil Net: Deep Residual Network for Precise Pupil Center Localization
299

tion:
L (I, θ) = αL
h
(I, θ) + (1 − α)L
c
(I, θ) (5)
where α a gain factor that controls the contribution of
each term to the total loss. This factor is set empiri-
cally to 0.3 as this value provides the best results.
However, the operator argmax is not a differen-
tiable function of the parameter vector θ and thus
it cannot be used to backpropagate and update the
parameters of the network. In order to make the
pipeline trainable, we adopt instead its soft counter-
part (Chapelle and Wu, 2010):
ˆ
x
c
(I, θ) =
∑
x∈X
p
β
(x, I, θ)x (6)
where:
p
β
(x, I, θ) = softargmax
x∈X
H
P
(x, I, θ) =
e
βH
P
(x,I,θ)
∑
y∈X
e
βH
P
(y,I,θ)
(7)
can be interpreted as the probability of H
P
(x, I, θ) to
be the maximum value of the heatmap produced by
the DeepPupil Net for a given input image I, and hy-
perparameter β is an arbitrarily big constant used to
raise the maximum value and lower the rest of the val-
ues of the heatmap. Note that when the accuracy pa-
rameter β tends to ∞ and the location where the max-
imum value of H
P
(I(x), θ) is attained is unique, the
p
β
(x, I, θ) converges to the following indicator func-
tion:
lim
β→∞
p
β
(x, I, θ) =
{p
∞
(x,I,θ)= max
x∈X
H
P
(x, I, θ)}
. (8)
Thus, the loss function defined in Eq. (4) can be
redefined as:
L
c
(I, θ) = ||x
c
(I) −
ˆ
x
c
(I, θ)||
2
2
(9)
Finally, we define the following total average loss
function:
L (θ) =
I∼ f
I
[L (I, θ)] (10)
that we would like to minimize with respect to the
network parameters vector θ.
3.4 Training Details
The network architecture consists of a pyramid struc-
ture with T = 3 stages with the number of kernels
at each stage to increase or decrease by a factor of
two in encoder and decoder respectively. The pro-
posed network was trained using the ADAM opti-
mizer (Kingma and Ba, 2015) for 15 epochs, with
initial learning rate of 10
−3
and batch size of 30 im-
ages. Moreover, we employ two types of regulariza-
tion during training in order to prevent the network
from overfitting. We use L
2
regularization of weights
with coefficient of 10
−4
as well as dropout with a rate
of P
drop
= 0.4 before and after the last residual block
of the encoder.
4 EXPERIMENTS
4.1 Experimental Setup
Experiments were carried out on three publicly avail-
able face databases for fair comparison and the perfor-
mance of the proposed method was extensively eval-
uated and compared with the state-of-the-art. Specif-
ically, the selected MUCT (Milborrow et al., 2010) ,
BioID (Jesorsky et al., 2001) and Gi4E (Villanueva
et al., 2013) databases were widely used by well-
known in the literature eye center localization tech-
niques while they were regarded as extremely chal-
lenging in terms of degradations. The images where
the face detector failed to detect the face due to ex-
treme poses, were excluded for the experiments. The
MUCT database comprises 3755 color images of low
resolution (640 × 480 pixels) with frontal or near
frontal faces. These images include a wide variety
of degradations related to pose and lighting variations
as well as occlusions from hair, glasses and reflec-
tions. The BioID database consists of 1521 grayscale
images of low resolution (384 × 288 pixels) includ-
ing 23 subjects taken at different times of the day
in different positions. This database is regarded a
one of the most challenging databases as it contains
wide scale and pose variations while many subjects
are wearing glasses or their eyes were closed or hid-
den by strong reflections on glasses. In order to ex-
plore the eye center localization task, 29 images that
contain totally closed eyes were manually removed.
The Gi4E dataset comprises 1380 high resolution
(800 × 600 pixels) color images of 103 individuals,
captured at indoor environment with illumination and
background variations. A variety of head poses and
gaze angles also resulted by asking the subjects to
look at specific points on their screen. Their head and
eye movements, the eyelid occlusions as well as the
lighting changes simulate realistic conditions for the
task of eye center localization.
The accuracy of the proposed technique and other
relative methods is evaluated adopting the normalized
error, which represents the worst eye center estima-
tion of the two eyes.The normalized error (e) is de-
fined as (Jesorsky et al., 2001):
e =
max{||
ˆ
C
L
−C
L
||
2
, ||
ˆ
C
R
−C
R
||
2
}
||C
L
−C
R
||
2
(11)
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
300

Figure 3: Precise eye center localization results on MUCT (a), BioID (b) and Gi4E (c) databases.
where,
ˆ
C
L
,
ˆ
C
R
are the estimated left and right eye
center coordinates respectively, while C
L
, C
R
are the
manually labeled corresponding coordinates. The re-
sulting accuracy is expressed as the percentage of the
eye center localizations that fall below the assigned
error threshold. Points with e ≤ 0.25 belong to a disk
area that extends from the eye center to the eye cor-
ners (lacrimal caruncle), points with e ≤ 0.1 belong
to the iris area while points withe ≤ 0.05 belong to
the pupil area.
4.2 Experimental Results
The evaluation of the proposed method demonstrates
that it is highly accurate and robust under many chal-
lenging conditions including shadows, pose and scale
variations as well as occlusions by hair, glasses and
strong reflections (please see Figure 3).
The accuracy of the proposed method was evalu-
ated adopting a 5-fold cross validation. This proce-
dure refers to splitting the dataset randomly into five
(5) subsets and using each single subset for testing
and the remaining ones for training. The accuracy
curves representing the percentage of the eye center
localizations in respect to the corresponding normal-
ized errors, were evaluated for each database and de-
picted in Figure 4. These curves reveal the enhanced
localization accuracy of the proposed method even
under the fine level (e ≤ 0.05).
Figure 4: Accuracy vs. normalized error in all under com-
parison databases.
The proposed method was compared with the
state-of-the-art techniques and the results are pre-
sented in the sequel.
Table 1 contains the accuracy achieved by the
proposed method and the state-of-the-art rivals in
the MUCT database. It is evident that on the de-
graded images of this database, the proposed method
achieves an improvement of 1.25% in performance
over the best method.
DeepPupil Net: Deep Residual Network for Precise Pupil Center Localization
301
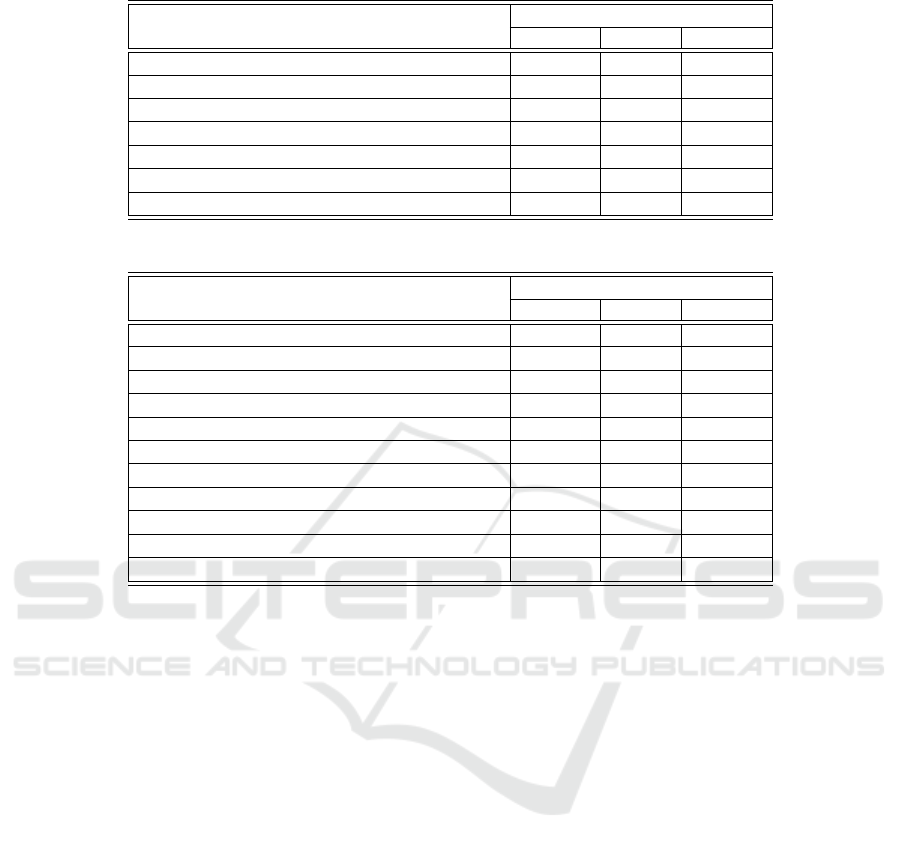
Table 1: Accuracy vs. normalized error in the MUCT database.
Method Accuracy (%)
e ≤ 0.05 e ≤ 0.1 e ≤ 0.25
DeepPupil Net 98.40 99 .97 100
PupilTan
2021
(Poulopoulos et al., 2021) 97.15 99.32 100
MFRST
2017
(Poulopoulos and Psarakis, 2017) 94.75 98.67 99.76
Skodras
2015
(Skodras and Fakotakis, 2015) 92.90 97.20 99.00
Timm
2011
(Timm and Barth, 2011) 78.60 94.90 98.60
Valenti
2008
(Valenti and Gevers, 2008) 63.10 76.70 94.10
Yang
2004
(Yang et al., 2004) 81.60 89.50 94.50
Table 2: Accuracy vs. normalized error in the BioID database.
Method Accuracy (%)
e ≤ 0.05 e ≤ 0.1 e ≤ 0.25
DeepPupil Net 98.00 100 100
PupilTan
2021
(Poulopoulos et al., 2021) 96.86 99.71 100
Lee
2020
(Lee et al., 2020) 96.71 98.95 100
Choi
2020
(Choi et al., 2020) 93.30 96.91 100
Xia
2019
(Xia et al., 2019) 94.40 99.90 100
Xiao
2018
(Xiao et al., 2018) 94.35 98.75 99.80
Li
2018
(Li and Fu, 2018) 85.60 95.90 99.50
Wang
2018
(Wang et al., 2018) 82.15 98.70 100
MFRST
2017
(Poulopoulos and Psarakis, 2017) 87.10 98.15 100
Cai
2017
(Cai et al., 2017) 86.80 96.60 99.90
Anjith
2016
(Anjith and Routray, 2016) 85.00 94.30 -
The performance of the proposed method in the
low resolution images of BioID face database is pre-
sented in Table 2 and compared with state-of-the-art
techniques. The superiority of the proposed method is
obvious in all error categories resulting an outstand-
ing precision accuracy and an increment of 1.14%
higher than the best method.
In Table 3, the accuracy achieved by the proposed
method in Gi4E database is also shown. In this case,
due to the higher resolution images and absence of
strong degradations, we presented also the accura-
cies for the normalized threshold 0.025. Note that
the accuracies denoted with
∗
were estimated from
the accuracy curves. The proposed method not only
achieves almost perfect localization for every error
category, but also outperforms the state-of-the-art for
up to 5.37% for the case of e ≤ 0.025. Moreover, we
explored the impact of training the proposed method
on MUCT and testing on Gi4E database. In this case,
the accuracy decrease was less than 1%, achieving
99.05% and 99.91% for the cases of e ≤ 0.05 and
e ≤ 0.1 respectively, demonstrating robustness of the
proposed technique to unseen images. The above
mentioned results lead us to the conclusion of a sig-
nificant improvement of the proposed method over the
state-of-the-art.
4.3 Ablation Study
In this section we analyze the impact of changing
the stages of the network architecture to the accuracy
and the processing time of the proposed method in
the BioID database. Each stage consists of a residual
block as well as the corresponding transposed convo-
lutional block and the skip connection between them
(please see Figure 1). Specifically, as shown in Table
4, decreasing the network architecture to two stages
also leads to an accuracy decrease up to 3, 49%. How-
ever, the resulting network with only 0.43M parame-
ters still provides comparable accuracy to the other
state-of-the-art methods. The optimum architecture
in terms of accuracy is the one with three stages and
thus it was selected for the experiments. Note that
the performance after adding more stages saturates.
Therefore, in terms of network complexity, Deep-
Pupil Net contains only 1.65M parameters, which is
significantly reduced in comparison with other deep
networks. Specifically, the U-Net contains 7.7M pa-
rameters, while the architectures proposed in (Lee
et al., 2020) and (Choi et al., 2020) contain 13.6M
and 4.9M respectively only for the face detection and
glasses removal networks, without considering the
eye localization network. Moreover, the selected net-
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
302
Table 3: Accuracy vs. normalized error in the Gi4E database.
Method Accuracy (%)
e ≤ 0.025 e ≤ 0.05 e ≤ 0.1
DeepPupil Net 98.37 99.91 100
Lee
2020
(Lee et al., 2020) 93.00
?
99.84 99.84
Choi
2020
(Choi et al., 2020) 90.40 99.60 99.84
Xia
2019
(Xia et al., 2019) 70.00
?
99.10 100
Xiao
2018
(Xiao et al., 2018) 70.00
?
97.90 100
Levinshtein
2018
(Levinshtein et al., 2018) 88.34 99.27 99.92
Cai
2018
(Cai et al., 2018) 85.70 99.50 -
Table 4: DeepPupil Net performance for different architectures in the BioID database.
Network Stages Number of Parameters Time Accuracy (%)
e ≤ 0.05 e ≤ 0.1 e ≤ 0.25
2 0.43M 13.2ms 94.51 99.50 100
3 1.65M 15.0ms 98.00 100 100
4 6.57M 18.0ms 97.86 100 100
work achieves real-time performance as it requires
only 15ms, in Matlab implementation, to process both
the eyes for every input image.
5 CONCLUSIONS
In this paper, the DeepPupil Net, a FCN that solved
in an accurate and robust manner the eye center lo-
calization problem is introduced. This network con-
sists of an encoder-decoder based architecture and
was trained end-to-end to localize precisely the eye
centers even in the most challenging circumstances.
An extensive evaluation of the proposed method on
three publicly available databases demonstrated a sig-
nificant improvement in accuracy over state-of-the-art
techniques. Moreover, due to its reduced processing
time, DeepPupil Net can be incorporated in low-cost
eye trackers, where the real-time performance is pre-
requisite.
REFERENCES
Anjith, G. and Routray, A. (2016). Fast and accurate al-
gorithm for eye localization for gaze tracking in low
resolution images. arXiv preprint arXiv:1605.05272.
Cai, H., Liu, B., Ju, Z., Thill, S., Belpaeme, T., Vander-
borght, B., and Liu, H. (2018). Accurate eye center
localization via hierarchical adaptive convolution. In
British Machine Vision Conference (BMVC). British
Machine Vision Association.
Cai, H., Liu, B., Zhang, J., Chen, S., and Liu, H. (2017).
Visual focus of attention estimation using eye center
localization. IEEE Systems Journal, 11.
Campadelli, P., Lanzarotti, R., and Lipori, G. (2009). Pre-
cise eye and mouth localization. Int. Journal of Pat-
tern Recognition and Artificial Intelligence, 23:359–
377.
Chapelle, O. and Wu, M. (2010). Gradient descent opti-
mization of smoothed information retrieval metrics.
Information retrieval, 13:216–235.
Choi, J., Lee, K., and Song, B. (2020). Eye pupil localiza-
tion algorithm using convolutional neural networks.
Multimedia Tools and Applications, 79:32563–32574.
Everingham, M. and Zisserman, A. (2006). Regression and
classification approaches to eye localization in face
images. In International Conference on Automatic
Face and Gesture Recognition, pages 441–446. IEEE.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In International
Conference on Computer Vision and Pattern Recogni-
tion, pages 770–778. IEEE.
Jesorsky, O., Kirchbergand, K. J., and Frischholz, R.
(2001). Robust face detection using the hausdorff dis-
tance. In Audio and Video Biom. Pers. Authentication,
pages 90–95.
Kar, A. and Corcoran, P. (2017). A review and analysis
of eye-gaze estimation systems, algorithms and per-
formance evaluation methods in consumer platforms.
IEEE Access, 5:16495–16519.
Kingma, D. and Ba, J. (2015). Adam: A method for
stochastic optimization. In IEEE International Con-
ference on Learning Representations. IEEE.
Krafka, K., Khosla, A., Kellnhofer, P., Kannan, H., Bhan-
darkar, S., Matusik, W., and Torralba, A. (2016). Eye
tracking for everyone. In International Conference
on Computer Vision and Pattern Recognition (CVPR),
pages 2176–2184. IEEE.
Lee, K., Jeon, J., and Song, B. (2020). Deep learning-based
pupil center detection for fast and accurate eye track-
ing system. In European Conference on Computer Vi-
sion (ECCV), pages 36–52. Springer.
DeepPupil Net: Deep Residual Network for Precise Pupil Center Localization
303

Levinshtein, A., Phung, E., and Aarabi, P. (2018). Hybrid
eye center localization using cascaded regression and
hand-crafted model fitting. Image and Vision Comput-
ing, 71.
Li, B. and Fu, H. (2018). Real time eye detector with cas-
caded convolutional neural networks. Applied Com-
putational Intelligence and Soft Computing.
Loy, G. and Zelinsky, A. (2003). Fast radial symmetry for
detecting points of interest. IEEE Transactions on Pat-
tern Analysis and Machine Intelligence, 25:959–973.
Milborrow, S., Morkel, J., and Nicolls, F. (2010). The muct
landmarked face database. Pattern recognition asso-
ciation of South Africa, 201.
Niu, Z., Shan, S., Yan, S., Chen, X., and Gao, W. (2006).
2d cascaded adaboost for eye localization. In Interna-
tional Conference on Pattern Recognition. IEEE.
Poulopoulos, N. and Psarakis, E. Z. (2017). A new high pre-
cision eye center localization technique. In IEEE In-
ternational Conference on Image Processing (ICIP),
pages 2806–2810. IEEE.
Poulopoulos, N. and Psarakis, E. Z. (2018). Real time
eye localization and tracking. In 27th International
Conference on Robotics in Alpe-Adria Danube Region
(RAAD), pages 560–571. Springer.
Poulopoulos, N., Psarakis, E. Z., and Kosmopoulos, D.
(2021). Pupiltan: A few-shot adversarial pupil local-
izer. In International Conference on Computer Vision
and Pattern Recognition Workshops (CVPRW), pages
3128–3136. IEEE.
Ronneberger, O., Fischer, P., and Brox, T. (2015). U-
net: Convolutional networks for biomedical image
segmentation. In International Conference MICCAI,
pages 234–241. Springer.
Skodras, E. and Fakotakis, N. (2015). Precise localization
of eye centers in low resolution color images. Image
and Vision Computing Journal, Elsevier, 12:537–543.
Timm, F. and Barth, E. (2011). Accurate eye centre lo-
calization by means of gradients. In VISAPP, pages
125–130.
Valenti, R. and Gevers, T. (2008). Accurate eye center lo-
cation and tracking using isophote curvature. In Inter-
national Conference on Computer Vision and Pattern
Recognition (CVPR’08), pages 1–8. IEEE.
Villanueva, A., Ponz, V., Sesma-Sanchez, L., Ariz, M.,
Porta, S., and Cabeza, R. (2013). Hybrid method
based on topography for robust detection of iris cen-
ter and eye corners. ACM Transactions on Multimedia
Computing, Communications and Applications, 9.
Wang, Z., Cai, H., and Liu, H. (2018). Robust eye center
localization based on an improved svr method. In Int.
Conf. on Neural Information Processing, pages 623–
634. Springer.
Xia, Y., Yu, H., and Wang, F. (2019). Accurate and ro-
bust eye center localization via fully convolutional
networks. IEEE/CAA Journal of Automatica Sinica,
6:1127–1138.
Xiao, F., Huang, K., Qiu, Y., and Shen, H. (2018). Ac-
curate iris center localization method using facial
landmark, snakuscule, circle fitting and binary con-
nected component. Multimedia Tools and Applica-
tions, 77:25333–25353.
Yang, P., Du, B., Shan, S., and Gao, W. (2004). A novel
pupil localization method based on gaboreye model
and radial symmetry operator. In International Con-
ference on Image Processing (ICIP’04), pages 67–70.
IEEE.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
304
