
3-D Tennis Ball Trajectory Estimation from Multi-view Videos and Its
Parameterization by Parabola Fitting
Kenta Sohara
a
and Yasuyuki Sugaya
b
Toyohashi University of Technology, Toyohashi, Aichi, Japan
Keywords:
3-D Reconstruction, Multi-views, Parabola Fitting, Parameterization of Ball Trajectory.
Abstract:
We propose a new method for estimating 3-D trajectories of a tennis ball from multiple video sequences and
parameterizing the 3-D trajectories. We extract candidate positions of a ball by a frame difference technique
and reconstruct 3-D positions of them by two-view reconstruction for every image pairs. By analyzing a
distribution of the reconstructed 3-D points, we find a cluster among them and decide its cluster center as the
3-D ball position. Moreover, we fit a plane to the estimated 3-D trajectory and express them as a 2-D point
data. We parameterize the 2-D data by fitting two parabolas to them. By simulation and real experiments, we
demonstrate the efficiency of our method.
1 INTRODUCTION
Recently, computer vision techniques have attracted
a lot of attention in sports analytics. For example,
in order to improve player skills, one analyzes sports
scenes by using computer vision techniques. For
judging and analyzing sports scenes, computer vi-
sion techniques are also used. In professional tennis
matches, one uses the Hawk-eye system(Hawk-Eye,
2002) to judge whether the ball bounces on the court
or not. In volleyball matches in Japan, a system that
measures a 3-D ball position and shows its trajectory
and speed is used.
We are now developing a coaching assist system
for tennis players. In this paper, we propose a new
method for estimating 3-D trajectories of a tennis ball
from multiple video sequences and parameterizing its
3-D trajectories. By using our method, we can sta-
bly compute the 3-D ball trajectory and estimate the
ball position if we cannot observe it in the input video
sequences.
Many researches for tracking a tennis ball and
players from video sequences exist. We can classify
these methods into two categories. One tracks a tennis
ball in 2-D image space. The other estimates the 3-D
ball trajectories. Yan et al. proposed a method that
tracked a tennis ball from one low quality video(Yan
et al., 2005). They extracted a ball region by a frame
a
https://orcid.org/0000-0003-2831-0054
b
https://orcid.org/0000-0002-4400-1051
difference technique and tracked it by using a particle
filter. Archana et al. detected a ball region by a frame
difference and background subtraction(Archana and
Geetha, 2015). Qazi et al. proposed a method that
extracted a ball candidate region by color information
and saliency features and decided the ball region by
the random forest method(Qazi et al., 2015). Pol-
ceanu et al. took a video by a fish-eye lens camera
and proposed a method for tracking a tennis ball in
real time(Polceanu et al., 2018). All these methods
extracted and tracked a ball in the image frames.
On the other hand, Takanohashi et al. proposed
a method for reconstructing a 3-D ball trajectory by
a shape from silhouette method(Takanohashi et al.,
2007). They also reconstructed the 3-D trajectory
from asynchronous video sequences. Fazio recon-
structed 3-D positions of the ball from two smart
phone videos. Since their method reconstructs a
ball position by two-view reconstruction, they can-
not reconstruct it if the ball is not observed in one
or both cameras. Miyata et al. proposed a method
that reconstructed a ball trajectory from multi-view
videos(Miyata et al., 2017). They automatically
synchronize video sequences from uncalibrated and
asynchronous video sequences by using an epipolar
constraint. However, they assume that a ball is ob-
served in all video sequences. In our research, we re-
construct a 3-D ball position by two-view reconstruc-
tion technique among some image pairs. Therefore,
our method can reconstruct the ball position if the ball
is not observed in some cameras.
Sohara, K. and Sugaya, Y.
3-D Tennis Ball Trajectory Estimation from Multi-view Videos and Its Parameterization by Parabola Fitting.
DOI: 10.5220/0010768700003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 5: VISAPP, pages
769-776
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
769

Figure 1: Illustration of our proposed method flow.
2 PROPOSED METHOD
2.1 Overview of the Proposed Method
We propose a new method for estimating 3-D trajec-
tories of a tennis ball from multiple video sequences
and parameterizing them by parabola equations. By
using the parameterized trajectories, we can estimate
the ball speed and its bounced position.
We reconstruct 3-D positions of moving objects,
which are extracted by a frame difference technique,
by two-view reconstruction and decide the centroid
of a cluster points as the position of the ball. After
computing a 3-D ball trajectory, we fit a plane to them
and express those trajectory as 2-D points. Then, we
fit two parabolas to them and correct and interpolate
them by the fitted parabola equations.
Therefore, our method has the following advan-
tages against the existing methods and these are the
contributions of this paper:
• We can obtain the 3-D ball position without decid-
ing and tracking the 2-D ball position explicitly.
This is superior to the tracking based methods.
• We can compute the ball position if we cannot ob-
serve it in some images. Miyata’s methods uses
multiple camera information, however, they as-
sume that a ball is observed in all video sequence.
• We can stably obtain the ball position compared
with a multi-view reconstruction by reducing in-
fluences of miss-detection and noise of the 2-D
ball position.
• By fitting a parabola to a ball trajectory, we can
estimate the 3-D ball position and its speed at an
arbitrary time.
We show the flow of our proposed method in
Fig. 1. We roughly classify all the process into three
categories.
1. Ball candidate detection by a frame difference
technique
2. 3-D reconstruction of the ball trajectory
3. Parameterization of the ball trajectory
We denote the details of each process in the fol-
lowing sections.
2.2 Preprocessing
We calibrate the camera parameters and synchro-
nize all video sequences in advance. For camera
calibration, we capture a chess pattern and estimate
the intrinsic parameters of the cameras by Zhang’s
method(Zhang, 2000). Then, after fixing the cameras
around the tennis court, we estimate the extrinsic pa-
rameters of the cameras, namely camera location and
pose, from the correspondences of 3-D and 2-D line
parameters of the tennis court by Zhang(Zhang et al.,
2012). For video synchronization, we manually syn-
chronize video sequences by visual inspection. The
automatic synchronization of the video sequences is a
future work.
2.3 Ball Candidate Region Extraction
For a ball region extraction from an image, we use a
well-known techniques for detecting moving objects.
We first extract moving objects from video images by
using a frame difference technique. For a target image
I
(t)
at a timet, we apply pixel subtraction by I
(t−k)
and
I
(t+k)
and generate binary images B
(t,t−k)
and B
(t,t+k)
by thresholding, respectively. Here, k is a frame inter-
val for the frame difference.
We extract moving objects in I
(k)
by applying
AND operation for the binary images B
(t,t−k)
and
B
(t,t+k)
followed by morphology operation for noise
reduction. Finally, we select centroids of the detected
small objects as candidates of a tennis ball position.
Here, it is difficult to select a ball among the extracted
moving objects. In this process, we do not decide one
candidate position.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
770

3 3-D RECONSTRUCTION OF A
BALL TRAJECTORY
3.1 Flow of the 3-D Reconstruction
From the extracted candidate ball positions in images,
we first make point pairs for all candidate points in all
the image frame pairs. Then, we reconstruct 3-D po-
sitions of the point pairs by two view reconstruction
method if they satisfy the epipolar constraint. We de-
tect cluster points among all the reconstructed points
and decide their centroid as a 3-D ball position.
3.2 Epipolar Constraint
For given corresponding points x
(1)
= (x
(1)
, y
(1)
, 1)
⊤
and x
(2)
= (x
(2)
, y
(2)
, 1)
⊤
between two images, the fol-
lowing epipolar equation holds:
(x
(1)
, Fx
(2)
) = 0, (1)
where, F is a 3× 3 matrix and is called a fundamen-
tal matrix. The notation (a, b) shows an inner product
of two vectors a and b. For a point pair between two
images, we can compute the distances from a point to
the epipolar line defined by the other point by chang-
ing the roll of two points. We judge that the point pair
satisfies the epipolar constraint if the mean distance is
small.
3.3 3-D Reconstruction from Feature
Points
If we know the matrix A
(k)
defined from the k-th
camera intrinsic parameters and the camera motion
{R
(k)
, t
(k)
}, we can reconstruct a 3-D point from
N(N ≥ 2) correspondences of image points(Hartley
and Zisserman, 2004; Kanatani et al., 2016).
In our method, we only detect moving objects in
an image space, namely a ball position are identified.
Therefore, we first reconstructa 3-D point from all the
detected point pairs if they satisfy the epipolar con-
straint.
3.4 Decision of the 3-D Ball Position
After reconstructing 3-D points by two-view recon-
struction, we detect a cluster among them. For each 3-
D point, we count neighboring points whose distance
from the target point are smaller than a pre-defined
threshold and we regard the point whose neighbor-
ing points are maximum and its neighboring points
as the cluster points. By considering the consis-
tency between consecutive frames, we detect a cluster
Figure 2: 3-D reconstruction of multi-view reconstruction
and cluster center.
which exists near the detected clusters in neighboring
frames. Then, we decide the centroid of those cluster
points as a 3-D ball position.
This 3-D position is not a reconstructed point from
image feature points, however, we consider that the
centroid of the cluster points is similar to a point re-
constructed by a multi-view reconstruction, because
the multi-view reconstruction computes the point so
as to minimize the sum of the distances from the lines
of view points passing through the feature points. So,
we think that if we have no outlier image points,
the accuracy of the 3-D points reconstructed from
the multi-view reconstruction and the cluster center
are almost same. However, if we have outliers from
which the reconstructed 3-D points are in the cluster(a
yellow point in Fig. 2), the accuracy of 3-D point re-
constructed by a multi-view construction may deteri-
orate(a blue point in Fig. 2).
Therefore, our method has the advantage that we
can stably obtain the ball position compared with a
multi-view reconstruction by reducing influences of
miss-detection and noise of the 2-D ball position. We
confirmed this advantage in the experiment section.
4 PARAMETERIZATION OF
BALL TRAJECTORY
For parameterizing the computed ball trajectory, we
apply the following processes:
1. In order to express the 3-D trajectory points as a
2-D point sequence, we fit a plane to them and
project them onto the fitted plane.
2. We fit two parabolas to the 2-D point sequence
and express it by parabola equations.
Since a ball trajectory is not a strict parabola
shape, we divide the computed trajectory into two
3-D Tennis Ball Trajectory Estimation from Multi-view Videos and Its Parameterization by Parabola Fitting
771

partial data with overlap and fit two parabolas to
them, respectively.
3. We correct the observed points and interpolate the
missing points by the computed parabola equa-
tions.
By parameterizing the ball position for parabola
equations, we can estimate a bounce position of the
ball if we cannot observe it in images.
4.1 Plane Fitting to the 3-D Trajectory
In order to express a 3-D trajectory of a ball as a 2-D
data, we first fit a plane to the 3-D trajectory. A plane
equation in 3-D space can be written in the form
Ax+ By+Cz+ D = 0. (2)
For 3-D trajectory r
α
= (x
α
, y
α
, z
α
)
⊤
, α = 1, ..., N, if
we define a data vector ξ
α
= (x
α
, y
α
, z
α
, 1)
⊤
and a pa-
rameter vector u = (A, B, C, D)
⊤
, we have (ξ
α
, u) ≈ 0
in the presence of the noise.
The simplest method for computing the plane pa-
rameter u is the least squares and the solution is given
by minimizing the following function:
J =
∑
N
α=1
(ξ
α
, u)
2
= (u, Mu), M =
∑
N
α=1
ξ
α
ξ
⊤
α
.
(3)
As we know, the solution of the least squares is given
as the unit eigenvector of the smallest eigenvalue of
the matrix M. In this paper, by considering the pres-
ence of outlier points, we fit a plane in the RANSAC
mechanism(Fischler and Bolles, 1981). After com-
puting a plane parameter vector u, we compute a pro-
jection matrix P by
P = I − nn
⊤
, n = N[(A, B, C)
⊤
], (4)
where, I is a 3× 3 identity matrix and N[a] is a nor-
malization operator that normalizes a vector norm to
be 1.
Them, we compute the 3-D data r
′
α
by projecting
the 3-D data r
α
onto the plane that is parallel to the
fitted plane and passes through the origin as follows:
r
′
= Pr. (5)
4.2 Rotation of the Plane
Since we parameterize a ball motion in 2-D space, we
need to restore the estimated ball position to a 3-D
data. Therefore, we rotate the fitted plane so that the
rotated plane is parallel to the YZ plane in the world
coordinate system and express the trajectory data as
2-D data in this plane. By this way, we can obtain
a 3-D ball position at an arbitrary time by applying
inverse rotation for the estimated 2-D position.
For computing such a rotation, we consider a ro-
tation such that the normal vector of the fitted plane
and the two vectors that span the plane correspond to
the XYZ axes of the world coordinate system.
By applying this rotation to the projected trajec-
tory points, we have the 3-D data whose X values are
0. We select Y and Z values of the 3-D data and ex-
press it as 2-D data. Then we use it for a parabola
fitting.
4.3 Parabola Fitting to the 2-D
Trajectory
In our method, we assume the following parabola
equation without rotation.
Ax
2
+ 2Bx+ 2Cy+ D= 0. (6)
We define a data vector ξ and a parameter vector u in
ξ =
x
2
2x
2y
1
, u =
A
B
C
D
, (7)
Eq. (6) is written by (ξ, u) = 0. Therefore, we can
compute the parabola parameter u by the same way
of the plane fitting. Moreover, we also apply the
RANSAC to a parabola fitting by considering the
presence of outlier points.
4.4 Correction and Interpolation of
Data
Based on the fitted parabola, we project the observed
data onto it and interpolate the missing data, for ex-
ample, removed points as outliers of a plane and a
parabola fitting.
In order to project a 2-D point onto the fitted
parabola, we need to compute the its foot of the
perpendicular line. However, since it is difficult
to compute it analytically, we apply the Sugaya’s
method(Sugaya, 2010) to the parabola equation de-
fined by Eq. (6). For limitation of the paper space, we
omit the details of the algorithm.
We interpolate the missing points linearly by using
the corrected points and the fitted parabola equation.
5 EXPERIMENTAL RESULTS
5.1 Simulation for Quantitative
Evaluation
We first evaluated the accuracy of the 3-D reconstruc-
tion by simulated data. We virtually fixed 16 cameras
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
772
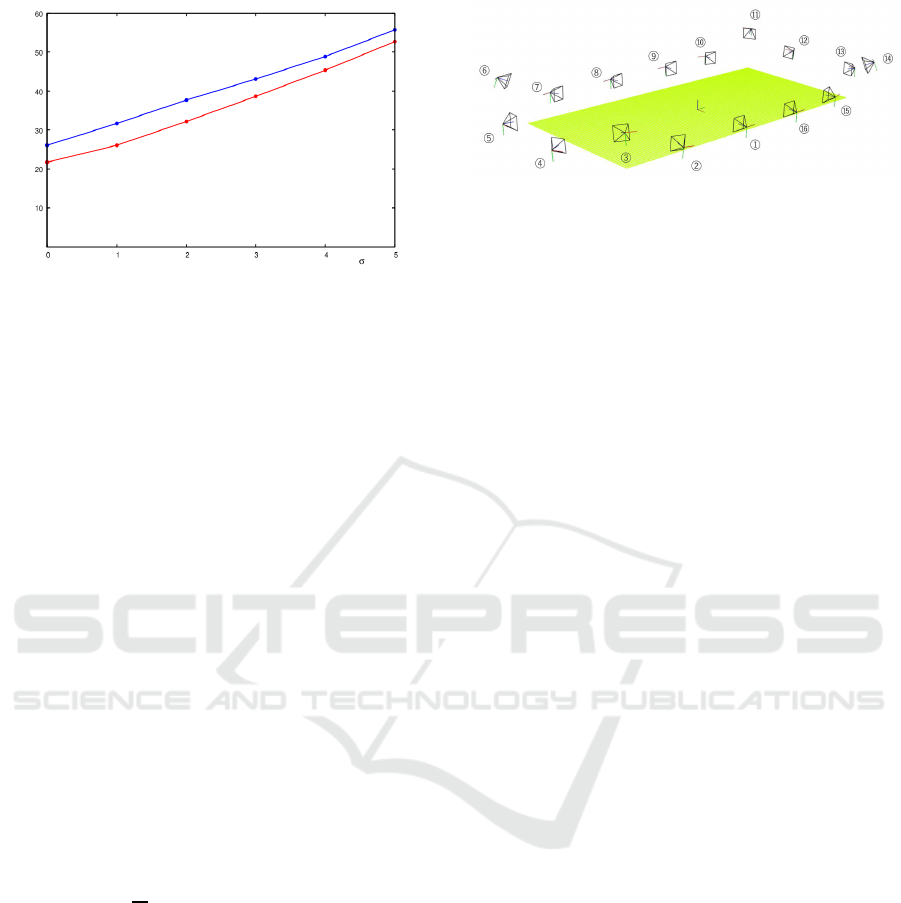
Figure 3: Comparison of 3-D reconstruction error. the blue
line: multi-view reconstruction, the red line: the proposed
method.
around a tennis court. Their positions are almost same
as shown in Fig. 4. We defined the origin of a world
coordinate system at the center of the tennis court
and set X, Y, and Z axes as red , green and blue line
shown in the Fig. 4, respectively. We randomly gener-
ated 10000 points in the tennis court space with 3000
mm height, namely, −5485 ≤ x ≤ 5485, −11885 ≤
y ≤ 11885, and 0 ≤ z ≤ 3000, in millimeter unit, re-
spectively, and projected them onto the virtual im-
age planes with 1920 × 1080 pixels. If the projected
points were out of the image frame, we judged that we
could not observe the ball from these cameras. Then,
we added independent Gaussian noise of mean 0 and
standard deviation σ, σ = 0.0, 1.0, ..., 5.0 to the x and
y coordinates of the projected image points. For real-
izing outlier points, we randomly selected from 0 to 5
cameras and add independent Gaussian noise of mean
5.0+2σ and standard deviation σ, σ = 0.0, 1.0, ..., 5.0
to its projected points. Then, we estimated their 3-D
positions by the proposed method and a multi-view
reconstruction.
Figure 3 shows the average error computed by
1
N
N
∑
α=1
k
¯
X
(α)
− X
(α)
k, (8)
where
¯
X
(α)
and X
(α)
are the true position and the esti-
mated 3-D position of the α-th point, respectively and
N is the number of points. The horizontal axis shows
the standard deviation σ for Gaussian noise. In this
experiment, we set the threshold for finding a cluster
points to be 200 [mm]. From the result of Fig. 3, the
proposed method is superior to the multi-view recon-
struction.
5.2 Conditions of Real Experiments
We fixed 16 cameras around a tennis court and cap-
tured tennis scenes by the SONY FDR-X3000 at 120
Figure 4: Calibrated camera positions.
fps. The image size is 1920 × 1080 pixels. We man-
ually calibrated camera extrinsic parameters by 2-D
and 3-D line correspondences. Figure 4 showsthe cal-
ibrated camera positions. We manually synchronized
all video sequences and tested our method for the
eleven divided partial sequences. We set the thresh-
old for finding a cluster points to be 200 [mm]. For
RANSAC, we stop iteration if the solution does not
change 200 times consecutively.
5.3 Reconstructed 3-D Ball Trajectories
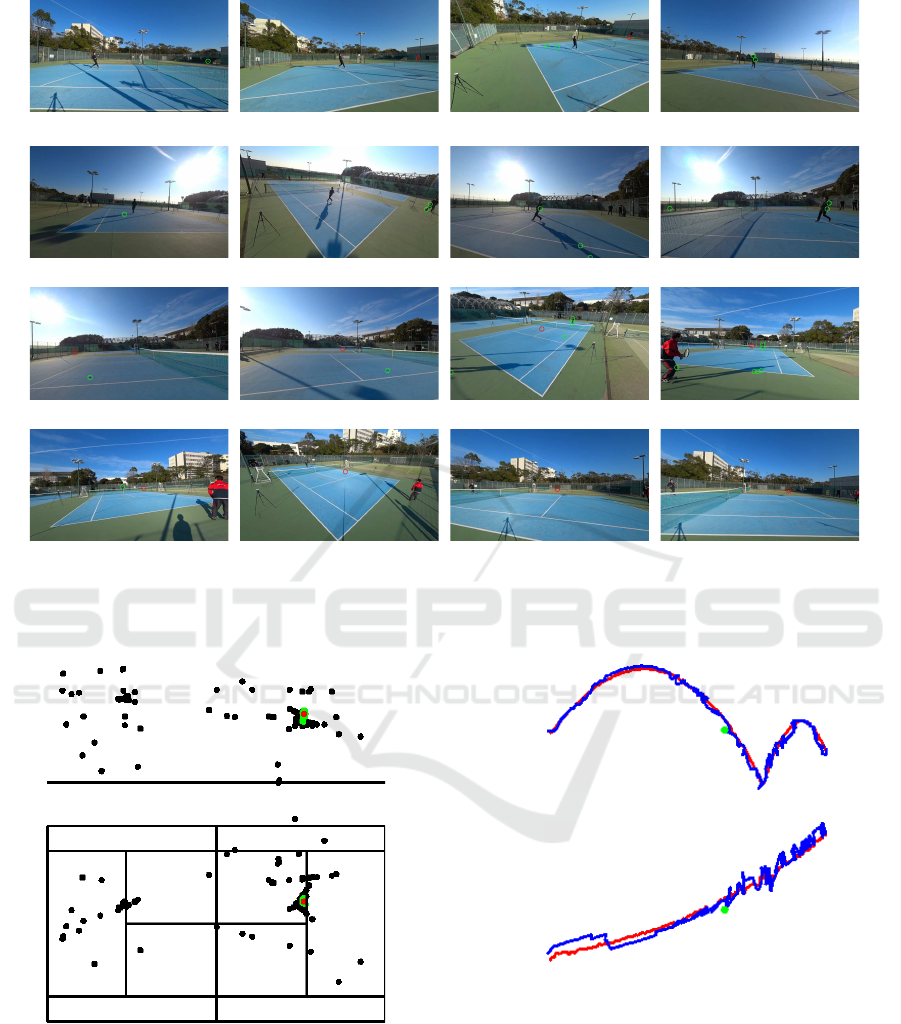
Figure 5 shows ball candidate points detected by a
frame difference. For these candidate points, we made
stereo pairs and reconstructed 3-D positions of them
if the stereo pairs satisfy the epipolar constraint. The
green and red circles in Fig. 5 show the detected can-
didate points. From Fig. 5, we can see that the mov-
ing objects which are not a tennis ball, for example
human and its shadow, are also detected. Figure 6
shows the reconstructed 3-D points of the detected
moving objects in the 2925-th frame, which is in the
6-th partial sequence. The black points are all the re-
constructed points and the green points indicate the
selected cluster points, and the red is their centriod.
The red circle in Fig. 5 shows the position used by
two-view reconstruction of the green cluster points.
We also show the 3-D trajectory of the 6-th partial
sequence in Fig. 7. The red line shows the result of
our method and the blue line shows the results of a
multi-view reconstruction. We used the cluster point,
which are the green pointsin Fig. 6, for the multi-view
reconstruction. As you can see, our method gives sta-
ble results compared with the multi-view reconstruc-
tion. The green point is the 3-D point of the 2925-th
frame reconstructed by the multi-view reconstruction.
By checking the ball position of the 14-th camera in
Fig. 5, we find that the detected ball position is not a
correct ball position. From this result, we confirmed
the our method could reduce the influence of such a
miss detection and obtain a stable result.
We show the reconstructed ball trajectories of all
sequences in Fig. 8.
3-D Tennis Ball Trajectory Estimation from Multi-view Videos and Its Parameterization by Parabola Fitting
773
Camera 1 Camera 2 Camera 3 Camera 4
Camera 5 Camera 6 Camera 7 Camera 8
Camera 9 Camera 10 Camera 11 Camera 12
Camera 13 Camera 14 Camera 15 Camera 16
Figure 5: Detected ball candidate points. The center of green circle, including a red circle, indicates a candidate of the ball
position extracted by a frame difference. Red circle indicates the ball position used by two-view reconstruction of selected
cluster points.
(a) Side view
(b) Top view
Figure 6: 3-D reconstruction of the ball candidate points.
Green points indicate cluster points. Red point indicates
centroid of the cluster. Black points indicate the others.
5.4 Results of Ball Trajectory
Parameterization
For the computed 3-D trajectories, we manually
selected partial trajectories which lie on the first
(a) Side view
(b) Top view
Figure 7: Computed 3-D trajectory. Red line indicates the
result of our method. Blue line is the result of a multi-
view reconstruction. Green point is the 3-D point of 2925-th
frame reconstructed by the multi-view reconstruction.
parabola shape and parameterized them as parabola
equations.
We fitted a plane to the estimated 3-D ball trajec-
tory and expressed it as a 2-D point sequence. Next,
we fitted two parabolas to the 2-D points and cor-
rected and interpolated them by the fitted parabolas.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
774
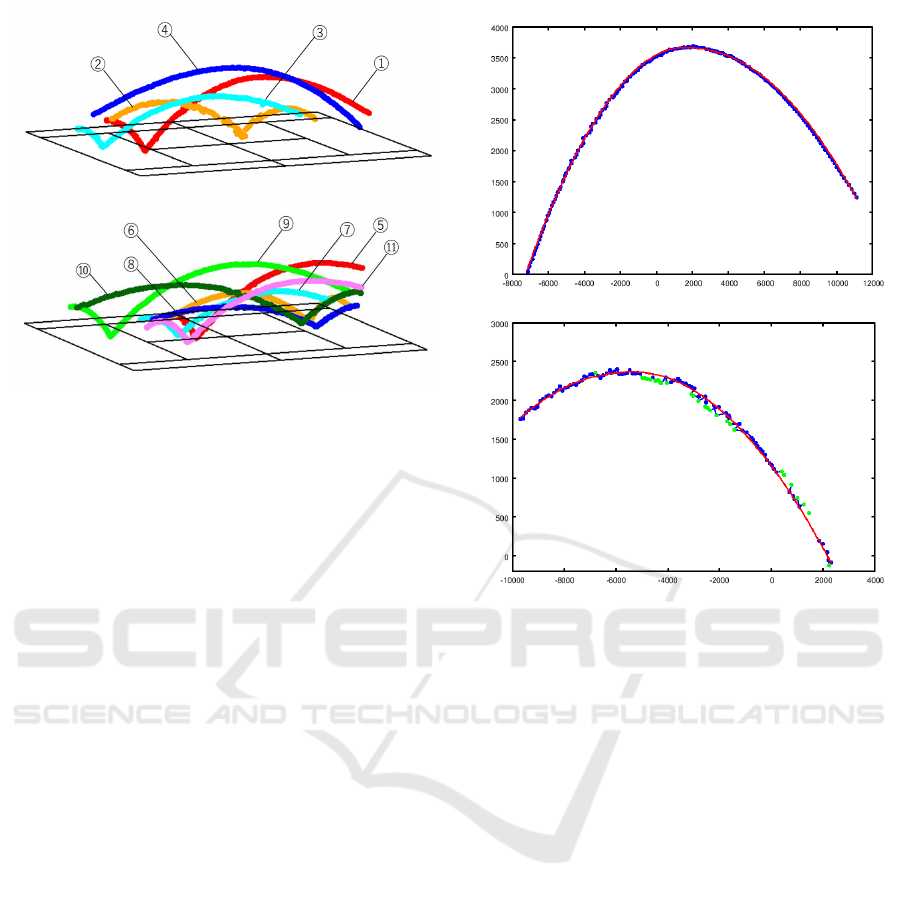
Figure 8: Reconstructed ball trajectories.
Figure 9 shows the results for the two trajectories (1)
and (2) in Fig. 8. The blue points show the input 2-D
points computed by a plane fitting and the red points
are the result of data correction and interpolation.
Since the input data of Fig. 9(a) is accurately es-
timated data, outlier points are not detected on the
plane fitting and the parabola fitting processes and the
result of our method matches to the input data very
well. On the other hand, the input data of Fig. 9(b)
is very noisy and there exists outlier points. The
green points in Fig. 9(b) are the outlier points de-
tected by the parabola fitting. However, the result of
our method is very smooth and matches to the input
data.
5.5 Estimation of Unobserved Ball
Position
Finally, we estimated a bounce position of the ball
of the trajectory data (4) in Fig. 8. The last image
frame of this sequence corresponds to an immediately
before frame that the ball bounces.
Figure 10(a) shows the result of bounce position
estimation. The blue points are the observed ball po-
sitions in a 2-D space and the red line is the fitted
parabola to the latter data of the observed points. The
black line corresponds the ground of the world coor-
dinate system. We computed the intersection between
the parabola and the ground line. The green point
shows the computed intersection. We restored this
intersection to the 3-D point in the world coordinate
system and obtained the coordinates as (-1173.88,
11912.33, 0). Since the length from the court center
to the end line is 11885[mm] in definition and we as-
sume the radius of the ball is 33.5[mm], we will judge
that the ball bounces on the court.
(a) trajectory data of Fig. 8 (1)
(b) trajectory data of Fig. 8 (2)
Figure 9: 2-D ball trajectory. Blue points are the computed
2-D ball trajectory obtained from 3-D trajectory. Red points
are the corrected and interpolated points by our parabola
fitting method.
Figures 10(b) and (c) show the ball positions in the
last frame of this trajectory data. We can see that the
ball is located near the end line and we do not judge
whether the ball bounces in the court or not. The red
points are the computed 2-D image position from the
estimated 3-D ball positions and the blue point shows
the estimated bounce position.
We also estimated un-reconstructed ball positions.
Since we set a frame difference parameter k be 2, we
could not estimate 3-D positions of the ball in the last
two frames. So, we estimated their positions by inter-
polating them based on the fitted parabola equation.
The green points in Figs. 10(b) and (c) show their es-
timated positions. As we can see that the last green
point is drawn on the ball.
6 CONCLUSIONS
We proposed a new method for estimating 3-D trajec-
tories of a tennis ball from multiple video sequences
and parameterizing the 3-D trajectories by parabola
equations. We reconstructed 3-D ball positions of the
3-D Tennis Ball Trajectory Estimation from Multi-view Videos and Its Parameterization by Parabola Fitting
775
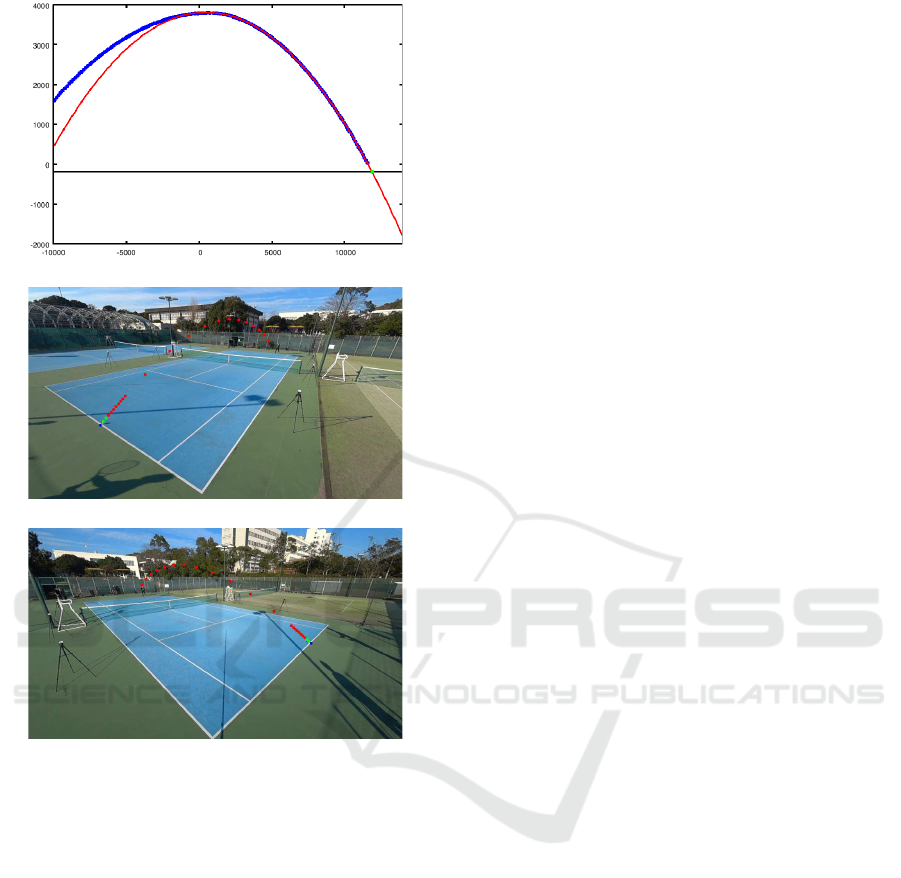
(a) Bounce position estimation in 2-D space.
(b) View from the camera No. 11 in Fig. 4
(c) View from the camera No. 14 in Fig. 4
Figure 10: Bounce position estimation result for the trajec-
tory data of Fig. 8 (4).
extracted candidate 2-D position by two-view recon-
struction for every image pairs. By analyzing a distri-
bution of the reconstructed 3-D points, we decided a
centroid of the cluster as the 3-D ball position. More-
over, we parameterized the 3-D ball trajectories by
fitting two parabolas to them.
In our simulation and real video experiments, we
confirmed that our method stably estimated the 3-
D ball trajectory compared with a multi-view recon-
struction method. We also confirmed that a ball tra-
jectory can be accurately parameterized by simple
parabola equations. We also estimated a bounce posi-
tion by using our parameterization result.
In future works, we plan to tackle automated syn-
chronization of input video sequences by using an
epipolar constraint. We also plan that we measure a
ball speed by a speed gun and compare it with the
speed estimated from our 3-D reconstruction results.
REFERENCES
Archana, M. and Geetha, M. K. (2015). Object detec-
tion and tracking based trajectory in broadcast tennis
video. Procedia Computer Science, 58:225–232.
Fischler, M. A. and Bolles, R. C. (1981). Random sample
consensus: A paradigm for model fitting with applica-
tions to image analysis and automated cartography. In
Communications of the ACM, volume 24, pages 381–
395.
Hartley, R. and Zisserman, A. (2004). Multiple View Geom-
etry in computer vision. Cambridge University Press.
Hawk-Eye (2002). http://www.hawkeyeinnnovations.co.uk.
Kanatani, K., Sugaya, Y., and Kanazawa, Y. (2016). Guide
to 3D Vision Computation: Geometric Analysis and
Implementation. Stringier International.
Miyata, S., Saito, H., Takahashi, K., Mikami, D., Isogawa,
M., and Kimata, H. (2017). Ball 3d trajectory recon-
struction without preliminary temporal and geometri-
cal camera calibration. In IEEE Conference on Com-
puter Vision and Pattern Recognition Workshop, pages
164–169.
Polceanu, M., Petac, A. O., Lebsir, H. B., Fiter, B., and
Buche, C. (2018). Real time tennis match tracking
with low cost equipment. In The Thirty-First Interna-
tional Florida Artificial Intelligence Research Society
Conference(FLAIRS-31), pages 197–200.
Qazi, T., Mukherjee, P., Srivastava, S., Lall, B., and
Chauhan, N. R. (2015). Automated ball tracking in
tennis videos. In Third International Conference on
Image Information Processing, pages 236–240.
Sugaya, Y. (2010). Ellipse detection by combining division
and model selection based integration of edge points.
In Proceedings of the 4th Pacific-Rim Symposium on
Image and Video Technology, pages 64–69.
Takanohashi, K., Manabe, Y., Yasumuro, Y., Imura, M., ,
and Chihara, K. (2007). Measurement of 3d ball tra-
jectory using motion blur. IPSJ Transactions of Com-
puter Vision nad Image Media, 48(SIG 1):35–47.
Yan, F., Christman, W., and Kittler, J. (2005). A tennis ball
tracking algorithm for automatic annotation of tennis
match. In British Machine Vision Conference 2005.
Zhang, X., Sun, X., Yuan, Y., Zhu, Z., and Yu, Q. (2012).
Iterative determination of camera pose from line fea-
tures. In International Archives of the Photogramme-
try, Remote Sensing and Spatial Information Sciences,
volume XXXIX-B1, pages 81–86.
Zhang, Z. (2000). A flexible new technique for camera cal-
ibration. IEEE Transactions on Pattern Analysis and
Machine Intelligence, 22(11):1330–1334.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
776
